汽车级Simulink建模与仿真共48页
matlab Simulink建模与仿真.ppt [兼容模式]
![matlab Simulink建模与仿真.ppt [兼容模式]](https://img.taocdn.com/s3/m/3dcc54e14afe04a1b071de8b.png)
第五章Simulink建模与仿真Ø系统仿真的基本概念Ø动态系统数学模型及其描述Ø动态系统的Simulink仿真Ø系统过零和代数环Ø子系统和S-函数Ø示例分析系统仿真的基本概念(一)系统(仿真的对象)•系统是指具有某些特定功能、按照某些规律结合起来、互相作用、互相依存的所有物体的集合或总和。
它具有整体性和相关性两个基本特征。
•研究系统通常从以下三方面考虑:实体:组成系统的元素、对象属性:实体的特征。
活动:系统由一个状态到另一个状态的变化过程系统仿真的基本概念(二)系统模型•系统模型是对实际系统的一种抽象,是系统本质的表述。
或者说模型是对真实世界中物体或过程的信息进行形式化的结果。
•系统仿真中所用的模型可分为实体模型和数学模型。
•实体模型,又称物理效应模型,是根据系统之间的相似性而建立起来的物理模型。
静态的实体模型最常见的是比例模型,如用于水洞实验以及实验水槽中的鱼雷比例模型。
模型类型静态系统模型动态系统模型连续系统模型离散事件系统集中参数分布参数时间离散数学描代数方程微分方程传递函数偏微分方差分方程、Z变换离散状态概率分布排系统仿真的基本概念述状态方程程方程队论应用举例系统稳态解工程动力学系统动力学热传导场计算机数据采样系统交通系统市场系统电话系统计算机分时系统Petri网状态机UML……系统仿真的基本概念(三)系统仿真的定义•系统仿真是以相似原理、系统技术、信息技术及其应用领域有关专业技术为基础,以计算机和各种专用物理效应设备为工具,利用系统仿真的特殊功效•安全性•经济性系统仿真的作用•优化系统设计。
在复杂的系统建立以前,能够通过改变仿真模型结构和调整参数来优化系统设计。
•对系统或系统的某一部分进行性能评价。
•节省经费。
仿真试验只需在可重复使用的模型上进行,所花费的成本比在实际产品上作试验低。
•重现系统故障,以便判断故障产生的原因。
•可以避免试验的危险性。
Carsim和Simulink联合仿真-精品文档

清华大学—恒隆汽车转向系统研究所
3 实例操作
图3.7 整车参数设置
清华大学—恒隆汽车转向系统研究所
3 实例操作
图3.8 新建仿真工况
清华大学—恒隆汽车转向系统研究所
3 实例操作
图3.9 驾驶员操纵条件设置
清华大学—恒隆汽车转向系统研究所
3 实例操作
图3.10 仿真时间设置
3 实例操作 奇瑞A3车60km/h的横向瞬态响应 仿真操作为例: 车速:60km/h 转向盘:幅值为53°、周期4s的 正弦角信号输入。
清华大学—恒隆汽车转向系统研究所
3 实例操作
打开Carsim,弹出下面对话框:
图3.1 选择Carsim数据库
清华大学—恒隆汽车转向系统研究所
3 实例操作
图3.2 Carsim许可设置对话框
3 实例操作
图3.22 Carsim导出变量的主界面
清华大学—恒隆汽车转向系统研究所3 实例ຫໍສະໝຸດ 作图3.23 选择导出变量文件
清华大学—恒隆汽车转向系统研究所
3 实例操作
图3.24 选择Carsim导出变量
清华大学—恒隆汽车转向系统研究所
3 实例操作
图3.25 发送到Simulink
1.2 Carsim建模
图1.6 Carsim整车模型示意图
清华大学—恒隆汽车转向系统研究所
1.2 Carsim建模
车辆特性
主界面
3D动画
测试环境
仿真求解
曲线绘制
图1.7 Carsim软件的主界面及构成
清华大学—恒隆汽车转向系统研究所
1.2 Carsim建模
图1.8 Carsim软件的车辆特性设置
车辆Simulink_建模仿真_还不错48页PPT
11、获得的成功越大,就越令人高兴 。野心 是使人 勤奋的 原因, 节制使 人枯萎 。 12、不问收获,只问耕耘。如同种树 ,先有 根茎, 再有枝 叶,尔 后花实 ,好好 劳动, 不要想 太多, 那样只 会使人 胆孝懒 惰,因 为不实 践,甚 至不接 触社会 ,难道 你是野 人。(名 言网) 13、不怕,不悔(虽然只有四个字,但 常看常 新。 14、我在心里默默地为每一个人祝福 。我爱 自己, 我用清 洁与节 制来珍 惜我的 身体, 我用智 慧和知 识充实 我的头 脑。 15、这世上的一切都借希望而完成。 农夫不 会播下 一粒玉 米,如 果他不 曾希望 它长成 种籽; 单身汉 不会娶 妻,如 果他不 曾希望 有小孩 ;商人 或手艺 人不会 工作, 如果他 不曾希 望因此 而有收 益。-- 马钉路 德。
44、卓越的人一大优点是:在不利与艰 难的遭遇里百折不饶。——贝多芬
45、自己的饭量自己知道。——苏联
41、学问是异常珍贵的东西,从任何源泉吸 收都不可耻。—— 己。——德国
43、重复别人所说的话,只需要教育; 而要挑战别人所说的话,则需要头脑。—— 玛丽·佩蒂博恩·普尔
Simulink建模与仿真(精华版)
上 页 下3 页
Simulink的特点:
(1)丰富的可扩充的预定义模块库 ; (2)交互式的图形编辑器来组合和管理直观的模块图 ; (3)以设计功能的层次性来分割模型,实现对复杂设计的管理; (4)通过Model Explorer 导航、创建、配置、搜索模型中的任
Simulink 仿真基础
1 Simulink的概述 2 基本操作 3 基本模块 4 建模方法 5 系统仿真举例
1
3.1 Simulink的概述
Simulink已经成为动态系统建模和仿真领域中应用最为广泛的软件之 一。Simulink可以很方便地创建和维护一个完整的模块,评估不同的 算法和结构,并验证系统的性能。由于Simulink是采用模块组合方式 来建模,从而可以使得用户能够快速、准确地创建动态系统的计算机 仿真模型,特别是对复杂的不确定非线性系统,更为方便。
Accelerator,Rapid Accelerator)来决定以解释性的方式运行 或以编译C代码的形式来运行模型 ; (8)图形化的调试器和剖析器来检查仿真结果,诊断设计的性 能和异常行为 ; (9)可访问MATLAB从而对结果进行分析与可视化,定制建模环境, 定义信号参数和测试数据; (10)模型分析和诊断工具来保证模型的一致性,确定模型中的错误。
说明 输入信号的积分运算 输入信号的微分运算 实现线性状态空间系统模型 实现线性传递函数系统模型 实现零-极点表达式的传递函数模型 输出前一个时间步的输入值 对输入信号进行传输延时后再输出 对输入信号进行可变时间的传输延时后再输出
⑤ 决定所有无显示设定采样时间的模块的采样时间; ⑥ 分配和初始化用于存储每个模块的状态和输入当前值的存储空间。
第六章-SIMULINK建模与仿真PPT课件
L0.02H
0.001
h
F
Mg
新疆大学电气工程学院
-
32
小球的动力学方程:
Md2h Mgi2
dt2
h
电流变化的方程:
L di V iR dt
d 2h dt 2
g
i2
Mh
di V R i dt L L
新疆大学电气工程学院
-
33
cixuanfu.mdl
新疆大学电气工程学院
-
34
课后练习:请查阅资料,建立瓦特离心调节器 的数学模型,并仿真之。
Kvs
y(s)
速度反馈控制
新疆大学电气工程学院
-
15
练习:习题6-3
ex5.mdl
新疆大学电气工程学院
-
16
SIMULINK求解代数方程:
daishufangcheng.mdl
新疆大学电气工程学院
-
17
SIMULINK求解微分方程:
例如已知: x(0)0,x(0)0,
求 x 0 .2 x 0 .4 x 0 .4 u 的解。
SIMULINK简介
Simulink是MATLAB下专门对动态系统进行 建模、仿真和分析的一个交互式软件,有友好的 图形用户界面,是图形化的、面向结构图仿真工 具。Simulink 支持线性,非线性系统,连续系统, 离散系统,或者混合系统的建模与仿真。同时它 也支持有不同采样率的的系统仿真。
新疆大学电气工程学院
2009年11月
u
n2
y
s2 2ns n2 n )
新疆大学电气工程学院
-
6
2009年11月
浏览器锁定 SIMULINK库
第二讲Simulink建模与仿真PPT课件
(2) 模块间连线的调整
如图1,这种调整模块间连线位置的情况采用鼠标简单拖动 的办法实现。即先把鼠标移到需要移动的线段的位置,按住 鼠标左键,移动鼠标到目标位置,释放鼠标左键。
还有一种情况如图2所示,要把一条直线分成斜线段。调整 方法和前一种情况类似,不同之处在于按住鼠标之前要先按 下Shift键,出现小黑方框之后,鼠标点住小黑方框移动,移 动好后释放Shift键和鼠标。
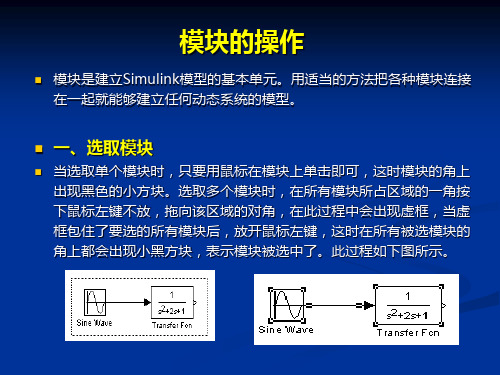
一、选取模块
当选取单个模块时,只要用鼠标在模块上单击即可,这时模块的角上 出现黑色的小方块。选取多个模块时,在所有模块所占区域的一角按 下鼠标左键不放,拖向该区域的对角,在此过程中会出现虚框,当虚 框包住了要选的所有模块后,放开鼠标左键,这时在所有被选模块的 角上都会出现小黑方块,表示模块被选中了。此过程如下图所示。
模块名和模块图标中的字体也可以更改,方法是选定模块,在菜单 Format下选取Font,这时会弹出Set Font的对话框,在对话框中选 取想要的字体。
(3) 改变模块名的位置
模块名的位置有一定的规律,当模块的接口在左右两侧时,模块名 只能位于模块的上下两侧,缺省在下侧:当模块的接口在上下两侧时, 模块名只能位于模块的左右两侧,缺省在左侧。
模块参数设置对话
每个模块都有一个内容相同的特性(Properties)设置对 话框,如下图所示。
它包括如下几项: (1) 说明(Description)
是对该模块在模型中用法的注释。 (2) 优先级(Priority)
规定该模块在模型中相对于其他模块 执行的有限顺序。优先级的数值必须 是整数或不输入数值,这时系统会自 动选取合适的优先级。优先级的数值 越小(可以是负整数),优先级越高。 (3) 标记(Tag) 用户为模块添加的文本格式的标记。 (4) 调用函数(Open function) 当用户双击该模块时调用的Matlab函 数。 (5) 属性格式字符串(Attributes format string)
Simulink四轮驱动小车的数学建模及仿真

---------------------------------------------------------------范文最新推荐------------------------------------------------------ Simulink四轮驱动小车的数学建模及仿真摘要本课题建模的对象为前轮转向、后轮驱动的小车。
论文采用机理分析和实验测试相结合的方法,建立该智能小车在平面上运动的双输入双输出模型。
根据小车运行和控制特点,输入量选取智能小车的舵机控制信号和电机控制信号,分别控制车辆转向和前进速度,输出量选取智能小车任意时刻在平面上的坐标。
首先通过机理分析得到智能小车的模型结构,舵机模型为带延迟的一阶微分方程,电机模型为一阶微分方程,在转向时需要在电机模型中加入前轮转向对速度的影响,然后通过运动学建模分析建立智能小车的整车模型结构。
其次,通过实验测试获取不同情况下小车运行数据,接着运用最小二乘法估计出模型中的未知参数。
将得到的模型和实际小车行驶情况进行对比,验证了此模型的有效性和可靠性。
5200关键词:智能车;建模;参数估计1 / 23ABSTRACTThis modelling object is a four-wheel electric smart car. The mechanism analysis method and experimental modelling method are employed to establish a two-input two-output mathematical model for a smart car. The input of the model is servo control signal and motor control signal, which respectively controls the smart car’s turning and speed, and the output of this model is complanate coordinate of the smart car, which has two degree of freedom. Firstly, the model structure is obtained by using mechanism analysis method. Then, the data of various scenarios for the step responses of the system are measured under different input. With least squares method applied, the parameters of the model are identified. Comparing the simulation result (using the identified model) and the actual experience data (using the smart car running with the same setting), we can see that this model is validated and proved to be reliable.Key words:smart car; kinematic model; parameter---------------------------------------------------------------范文最新推荐------------------------------------------------------ estimation目次四轮驱动最早应用于第一次世界大战的军事用车,很快这项技术在二战期间美国军事车吉普上得到广泛使用。
车辆典型部件Simulink建模仿真
front suspension
Ff
Fr
rear suspension
44
实战4:半车模型悬架系统
h
x 10-3 15
Vehicle Suspension Model Simulation
10
5
0
-5
0
1
2
3
4
5
6
7
8
9
10
My
100
50
0
0
1
2
3
4
5
6
7
8
9
10
7000
Ff
6500
Trigger
Logic & Bit Op. Continuous Discontinuites Discrete Signal Attributes User-Defined Fcn Ports & Subsystems Ports & Subsystems Ports & Subsystems Ports & Subsystems
Combinatorial Logic:组合逻辑模块;
27
实战2:离合器接合/分离模型
Simulink模型:
Tin
slipping
Tfmaxk
wv
Tin
we
NOT
Fn
回调函数 的使用
Tfmaxk Fn
Tfmaxs part6
1 Gain1
Scope2
1 Gain
Tin
w
locked
locked Tin
实战3:防抱死制动系统(ABS)
Simulink模型精讲