理论力学(机械工业出版社)第三章空间力系习题解答
理论力学习题答案
理论力学习题答案(总26页)--本页仅作为文档封面,使用时请直接删除即可----内页可以根据需求调整合适字体及大小--2第一章 静力学公理和物体的受力分析一、是非判断题在任何情况下,体内任意两点距离保持不变的物体称为刚体。
( ∨ ) 物体在两个力作用下平衡的必要与充分条件是这两个力大小相等、方向相反,沿同一直线。
( × ) 加减平衡力系公理不但适用于刚体,而且也适用于变形体。
( × ) 力的可传性只适用于刚体,不适用于变形体。
( ∨ ) 两点受力的构件都是二力杆。
( × ) 只要作用于刚体上的三个力汇交于一点,该刚体一定平衡。
( × ) 力的平行四边形法则只适用于刚体。
( × ) 凡矢量都可以应用平行四边形法则合成。
( ∨ ) 只要物体平衡,都能应用加减平衡力系公理。
( × ) 凡是平衡力系,它的作用效果都等于零。
( × ) 合力总是比分力大。
( × ) 只要两个力大小相等,方向相同,则它们对物体的作用效果相同。
( × )若物体相对于地面保持静止或匀速直线运动状态,则物体处于平衡。
( ∨ )当软绳受两个等值反向的压力时,可以平衡。
( × )静力学公理中,二力平衡公理和加减平衡力系公理适用于刚体。
( ∨ )静力学公理中,作用力与反作用力公理和力的平行四边形公理适用于任何物体。
( ∨ )凡是两端用铰链连接的直杆都是二力杆。
( × )如图所示三铰拱,受力F ,F 1作用,其中F 作用于铰C 的销子上,则AC 、BC 构件都不是二力构件。
( × )图3二、填空题力对物体的作用效应一般分为 外 效应和 内 效应。
对非自由体的运动所预加的限制条件称为 约束 ;约束力的方向总是与约束所能阻止的物体的运动趋势的方向 相反 ;约束力由 主动 力引起,且随 主动 力的改变而改变。
理论力学习题及答案(全)
第一章静力学基础一、是非题1.力有两种作用效果,即力可以使物体的运动状态发生变化,也可以使物体发生变形。
()2.在理论力学中只研究力的外效应。
()3.两端用光滑铰链连接的构件是二力构件。
()4.作用在一个刚体上的任意两个力成平衡的必要与充分条件是:两个力的作用线相同,大小相等,方向相反。
()5.作用于刚体的力可沿其作用线移动而不改变其对刚体的运动效应。
()6.三力平衡定理指出:三力汇交于一点,则这三个力必然互相平衡。
()7.平面汇交力系平衡时,力多边形各力应首尾相接,但在作图时力的顺序可以不同。
()8.约束力的方向总是与约束所能阻止的被约束物体的运动方向一致的。
()二、选择题1.若作用在A点的两个大小不等的力F1和F2,沿同一直线但方向相反。
则其合力可以表示为。
①F1-F2;②F2-F1;③F1+F2;2.作用在一个刚体上的两个力F A、F B,满足F A=-F B的条件,则该二力可能是。
①作用力和反作用力或一对平衡的力;②一对平衡的力或一个力偶。
③一对平衡的力或一个力和一个力偶;④作用力和反作用力或一个力偶。
3.三力平衡定理是。
①共面不平行的三个力互相平衡必汇交于一点;②共面三力若平衡,必汇交于一点;③三力汇交于一点,则这三个力必互相平衡。
4.已知F1、F2、F3、F4为作用于刚体上的平面共点力系,其力矢关系如图所示为平行四边形,由此。
①力系可合成为一个力偶;②力系可合成为一个力;③力系简化为一个力和一个力偶;④力系的合力为零,力系平衡。
5.在下述原理、法则、定理中,只适用于刚体的有。
①二力平衡原理;②力的平行四边形法则;③加减平衡力系原理;④力的可传性原理;⑤作用与反作用定理。
三、填空题1.二力平衡和作用反作用定律中的两个力,都是等值、反向、共线的,所不同的是。
2.已知力F沿直线AB作用,其中一个分力的作用与AB成30°角,若欲使另一个分力的大小在所有分力中为最小,则此二分力间的夹角为度。
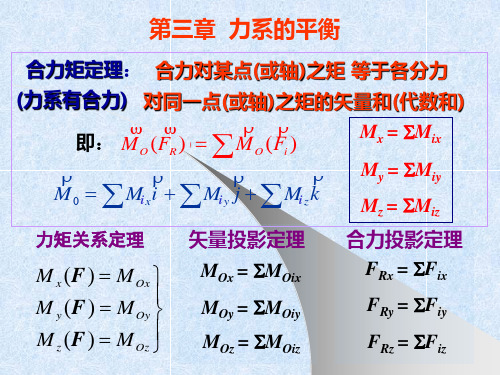
理论力学第三章空间力系

空间平行力系平衡方程
∑Fiz=0 , ∑Mix=0, ∑Miy =0,
PDF 文件使用 "pdfFactory Pro" 试用版本创建
具有 三个 平衡 方程 可解 三个 未知 量。
14
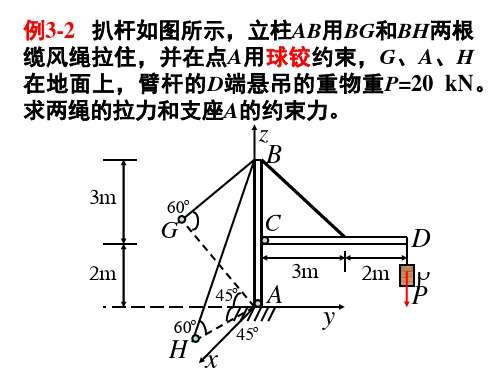
例3-3:重量P=1kN,A是球铰支座、A、B、C点是固定在 同一墙上,求:杆AD、绳DB,DC的约束内力。
FBZ
AB
-
P
1 2
AB
+
Fsin300 CD
=
0
∑Fix =0, FAX +FBX–Fcos300cos600=0,
FAZ FAY
x
∑Fiy =0, FAY– Fcos2300=0, FAY=150N
∑Fiz=0, FBZ +FAZ–P+Fsin300=0,
校核: ∑MDB =0 FAZ=100N
∑Miz=0,
PDF 文件使用 "pdfFactory Pro" 试用版本创建
空间任意物 体具有六个 平衡方程可 解六个未知
量。
13
空间汇交力系平衡方程
∑Fix=0 , ∑Fiy =0, ∑Fiz =0,
空间力偶力系平衡方程
∑Mix=0 , ∑Miy=0, ∑Miz =0,
M 0 = ∑ M ixi + ∑ M iy j + ∑ M izk
7
PDF 文件使用 "pdfFactory Pro" 试用版本创建
例3-2:拖拉机摇手柄OAB在oxz平面内,在A处作用一个力F, 已 知:F=50N,0A=20cm,AB=18cm,a=450,b=600, 求各轴之矩。
解:
z
理论力学答案第三章

《理论力学》第三章作业参考答案习题3-9解:力F在x 、y 坐标轴上的投影分别为:)(03.169100050301010222N F x =⨯++=)(09.507100050301030222N F y =⨯++=力F作用点的坐标为1500.15x m m m =-=-,(10050)0.15y mm m =+=。
所以,0.15507.090.15169.09101.4(.)Z y x M xF yF N m =-=-⨯-⨯≈-答: 力F对z 轴的力矩为-101.4Nm .习题3-11解:力F在x 、y 、z 坐标轴上的投影分别为:00cos 60cos 304x F F F ==1cos 60sin 304y F F F=-=-FF F Z 2360sin 0-=-=力F的作用点C 的坐标为1sin 302o x r r==,cos 302o y r ==,z h =。
所以,()Fr h F h F r zF yF My z X341412323-=⎪⎭⎫ ⎝⎛--⎪⎪⎭⎫ ⎝⎛-=-=()F r h F r F h xF zF Mz x y+=⎪⎪⎭⎫ ⎝⎛--⎪⎪⎭⎫ ⎝⎛=-=4323243rF F r F r yF xF Mxy Z214323412-=⎪⎪⎭⎫ ⎝⎛-⎪⎭⎫ ⎝⎛-=-=答:力F对x 、y 、z 轴的矩分别为:()134h r F -,)4h r F +,12rF-。
习题3-12解:以整个支架为研究对象。
由于各杆为二力杆,球铰链A 、B 、C 处的约束力A F 、B F 、C F 沿杆件连线汇交于D 端球铰链,与物块的重力P构成一空间汇交力系,其受力情况如图所示。
以O 为原点建立坐标系,列平衡方程,我们有⎪⎪⎩⎪⎪⎨⎧===∑∑∑000z y x F F F⎪⎩⎪⎨⎧=-++=++=-015sin 30sin 45sin 30sin 45sin 015cos 30cos 45sin 30cos 45sin 045cos 45cos 000000000000P F F F F F F F F C B A C B A B A 解之得:()()()cos1526.39()2sin 45sin 3015cos1526.39()2sin 45sin 3015cos 3033.46()sin 3015o A o o ooB o o ooC o o P F kN P F kN F P kN ⎧⎪==-⎪⎪⎪==⎨-⎪⎪⎪=-=-⎪-⎩答:铰链A 、B 的约束力均等于26.39kN ,方向与图示相同,即为压力,铰链C 的约束力等于-33.46 kN ,方向与图示相反,即为拉力。
C·A上传 【理论力学】第三章 力系的平衡
FDC FDB
P
BE = CE DB = DC 则:FDB = FDC
DO DO DO ∑ Fiy FDB = 0; FDC FDA =0 DB DC DA
cm DB = 20 3, , DA = 20 5;cm
FDA
EO AO 0; ∑ Fiz = FDB 2 FDA P=0 DB DA
汇交力系
√2 FA = FC = — F = FB 力多边形自行封闭
2
r F r F
C
B
r FB
例3-2:已知物体的重量为 .求:(a)平衡时铅垂力 , - :已知物体的重量为P )平衡时铅垂力F, (b)维持平衡时 的最小值及其相应方向.不计构件自重. )维持平衡时F 的最小值及其相应方向.不计构件自重. 讨论题
3 联立求解 FDA = P = 745N , 3 FDB = FDC = 289N
避免解联立方程 改变坐标方向
立柱AB与绳 与绳BC 例3-8:起重机起吊重量 =1kN.求:立柱 与绳 ,BD,BE - :起重机起吊重量P . x' 的受力. 的受力.
解: B点有四个未知力汇交, 点有四个未知力汇交, 点有四个未知力汇交
§3-1 汇交力系的平衡 -
汇交力系简化的结果
汇交力系平衡的充要条件: 汇交力系平衡的充要条件: 充要条件 力系的合力等于零
r FR = 0
各力全部 汇交力系平衡的几何条件 力多边形自行封闭 首尾相连 几何条件: 汇交力系平衡的几何条件: 仅适用于平 力多边形法则 解析条件: 汇交力系平衡的解析条件 平衡方程 汇交力系平衡的解析条件: 面汇交力系 几何法 空间汇交力系: 合力投影定理
理论力学3—空间力系2
解:以小车为研究对象,主动力和约束力组 成空间平行力系,受力分析如图。
列平衡方程
M F 0
x
F1 0.2 P 1.2 FD 2.2 0
M F 0,
y
F1 0.8 P 0.6
FD 0.6 FB 1.2 0
F
z
0,
50 z FAz A FAx x 20 Q
200 FBz B
100 y
FAy
FBx
Fy Fx Fz
FAy 352 N
Fy 0: FAy Fy 0
M y (F ) 0: 50Fz 100Q cos 20 0 Q 746 N M z (F ) 0: 200FBx 300Fx 50Fy 50Q cos20 0
z r1
O
A rC
C r2 y
F2 B
x
rC FR F r1 F1F r2 F2 F
0 0 0
rn Fn F
0
rC FR F r1 F1F r2 F2 F
0 0 0
rn Fn F
FR
0
去掉F 0 这个单位矢量
F1r1 F2 r2 rC FR
Fy Fx Fz
解: 取主轴及工件为研究对象。
向心轴承B的约束反力为FBx和FBz, 止推轴承A 处约束反力有FAx、FAy、FAz, 其中FAy 起止推作 用。主轴共受九个力作用, 是空间一般力系。
50 z FAz A FAx x 20 Q 200 FBz B y 100
FAy
FBx
Fy
Fx Fz
Fn rn
Fi ri Fi
理论力学3—空间力系1

3.3.2 空间力偶等效定理
空间力偶的等效条件是: 两个力偶的力偶矩矢相
等。
F
F'
F
F'
力偶由一个平面平行移至刚体另一个平行 平面不影响它对刚体的作用效果。
3.3 空间力偶系 3.3.3 空间力偶系的合成 力偶作用面不在同一平面内的力偶系称为空间 力偶系。 空间力偶系合成的最后结果为一个合力偶, 合力 偶矩矢等于各力偶矩矢的矢量和。即:
M
M
M
3.4.2 空间任意力系的简化结果分析
空间任意力系向任一点简化的结果可能出 现四种情况:
(1) F'R=0, MO≠0 ; (2) F'R ≠ 0, MO = 0 ; (3) F'R ≠ 0, MO≠0 ; (4) F'R=0, MO = 0
3.4.2 空间任意力系的简化结果分析
1) 空间任意力系简化为一合力偶的情形
Fy F cos(F , j)
Fz F cos(F , k)
z Fz
k
F Fy y
i Oj
x Fx
当力与坐标轴Ox 、Oy间的夹角不易确定时, 可 把力F先投影到坐标平面Oxy上, 得到力矢量Fxy, 然后再把这个力投影到x 、y轴上, 这叫间接投 影法(二次投影法)。
Fz F cos Fxy F sin
Fx F sin cos Fy F sin sin
z
Fz
O
Fx x
F Fy y
空间力的分解
z Fz
k
F Fy y
i Oj
x Fx
F = Fx Fy Fz Fxi Fy j Fzk
3.2 力对点的矩与力对轴的矩
理论力学---第三章 空间力系

B
P
Fz 0 : F cos P 0
E
C
D FD
F
C
z
A y
F
x
P
12
B
3.2 力对点的矩和力对轴的矩
3.2.1 力对点的矩以矢量表示-力矩矢 空间力对点的矩的作用效果取决于: MO(F)
z B F
(1)力矩的大小 (2)转向 (3)力矩作用面方位。
h 这三个因素可用一个矢量 M O (F ) 表示。 x 矢量的方位:与作用平面法线 大小: M O (F ) Fh
例1 重为P的物体用杆AB和位于同一水平面的绳索AC与AD支承,如图。
= 45° 已知:P=1000N,CD=AC=AD,E为CD中点,
不计杆重;求绳索的拉力和杆所受的力。 解:以铰A为研究对象,受力如图。
E
C
D
A
Fx 0 : FC sin FD sin 0
Fy 0: FC cos FD cos F sin 0
齿轮的啮合角(螺旋角) β 和压力角 ,试求力 Fn 沿 x,y 和 z 轴的分力。
6
解: 将力Fn向 z 轴和Oxy 平面投影
Fz Fn sin ,
将力Fxy向x,y 轴投影
Fxy Fn cos
Fx Fxy sin Fn cos sin Fy Fxy cos Fn cos cos
z Fz F B Fy
M z (F ) M O (Fxy ) M O (Fx ) M O ( Fy )
xFy yFx
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
理论力学(机械工业出版社)第三章空间力系习题解答习题3-1 在边长为a的正六面体上作用有三个力,如图3-26所示,已知:F1=6kN,F2=2kN,F3=4kN。
试求各力在三个坐标轴上的投影。
图3-26 F1x?0F1y?0F1z?F1?6kNF2y?Fcos45??2kNF2z?0F2x??F2cos45???2kNF3x?F3343?kN33F3 y??F3343??kN33F3z?F3343?kN 33 3-2 如图3-27所示,已知六面体尺寸为400 mm×300 mm×300mm,正面有力F1=100N,中间有力F2=200N,顶面有力偶M=20N·m作用。
试求各力及力偶对z轴之矩的和。
图3-27 ?Mz??F1cos45???F2434??20 ??202?24034?20???m 3-3如图3-28所示,水平轮上A点作用一力F=1kN,方向与轮面成a=60°的角,且在过A点与轮缘相切的铅垂面内,而点A与轮心O?的连线与通过O?点平行于y轴的直线成b=45°角,h=r=1m。
试求力F在三个坐标轴上的投影和对三个坐标轴之矩。
图3-28 Fx?Fcos?sin??1000?cos60??sin45??2502 N?354NFy??Fcos?cos???1000?cos60??sin45???25 02N??354N 1 Mx(F)?|Fy|?h?|Fz|?rcos??354?1?866?1?co s45???258N?mMy(F)?|Fx|?h?|Fz|?rsin??354?1?866?1?sin 45??966N?mMz(F)??Fcos??r??1000?cos60??1??500N? mFz??Fsin???1000?sin60???5003??866N3-4 曲拐手柄如图3-29所示,已知作用于手柄上的力F=100N,AB=100mm,BC=400mm,CD=200mm,a=30°。
试求力F对x、y、z轴之矩。
图3-29 ?Fsin?sin??100?sin230??25NFxFy??Fsin?cos???100?sin30??cos30???2 53N??Fz??Fcos30???100?cos30???503??Mx(F)??|Fy|?BC?|Fz|?(AB?CD)??253??50 3? ??253???m My(F)??|Fx|?BC??25???10N?mMz(F)??|Fx|?(AB?CD)??25????m3-5 长方体的顶角A和B分别作用力F1和F2,如图3-30所示,已知:F1=500N,F2=700N。
试求该力系向O点简化的主矢和主矩。
图3-30 ?x??F1?FR253?F2?214??2005? 10014?? ?y??F2?FR?z?F1?FR??FR1 45??15014?? 114?1005?5014? 1?F2?(?)2?(?)2??2 ???????????????? ??? ? ?? ?Mx(F)?F2?1141?3?15014?? m ?My(F)??F1??Mz(F)?0 5?2?F2?114?2??2005?10014???mMO(F)????m ? cos?????? cos???0???90? cos??????? ???? 3-6 有一空间力系作用于边长为a的正六面体上,如图3-31所示,已知:F1=F2=F3=F4=F,F5=F6= ??0 ?x?FR?y?FR?z?0 FRFR 2F。
试求此力系的简化结果。
图3-31 ?Mx(F)??F2a?F5a??Fa?2F a?(2?1)Fa? ?My(F)?0 ?Mz(F)?F3a?F 5a?Fa?2Fa?(1?2)Fa??MO(F)?2(2?1)Fa?(2?2)Fa?1cos??????45? 2cos???0???90? cos????1???135? 2 3-7 有一空间力系作用于边长为a的正六面体上,如图3-32 3 所示,已知各力大小均为F。
试求此力系的简化结果。
?x?0FR?yFR图3-32 ?z?2F ?2F FR??22F FRcos??0??90?12cos??cos??????45? ?Mx(F)?0 ?My(F)??2Fa?Mz(F)?2Fa MO(F)?22Fa cos???0???90? 12 cos????cos??? 12???135? ???45? 3-8 如图3-33所示的悬臂刚架,作用有分别平行于x、y轴的力F1与F2。
已知:F1=5kN,F2=4kN,刚架自重不计。
试求固定端O 处的约束反力和约束反力偶。
图3-33 ?Fx?0?Fy?0?Fz?0?Mx?0 ? My?0 ?Mz?0 FOx?F1?0 FOx??F1??5kN FOy?F2?0 FOy??F2??4kN FOz?0 MOx?F2?4?0 MOx?F2?4?16kN?m MOy?F1?6?0 MOy??F1?6?30kN?m MOz?F1?4?0 MOz??F1?4?20kN?m 3-9 墙角处吊挂支架两端铰接杆OA、OB和软绳OC构成,二杆分别垂直于墙面且绳OC维持在水平面内,如图3-34所示。
4 结点O处悬挂重物,重量W=500N,若OA=300mm,OB=400mm,OC绳与水平面的夹角为30°,不计杆重。
试求绳子拉力和二杆所受的压力。
图3-34 ?Fz?0FTsin30??W?0 FT?2W?1000N ?Fx?0FOA?FTcos30 ?sin??0FOA?FTcos30?sin??1000?33??300 3?25?Fy?0FOB?FTcos30?cos??0 FOA?FTcos30?cos??1000?34??4003? 25 3-10 如图3-35所示的空间支架。
已知:∠CBA=∠BCA=60°,∠EAD=30°,物体的重量为W=3kN,平面ABC是水平的,A、B、C各点均为铰接,杆件自重不计。
试求撑杆AB和AC所受的压力FAB和FAC及绳子AD的拉力FT。
图3-35 ?Fz?0FTsin30??W?0 FT?2W?6kN ?Fx?0FACsin30??FAB sin30??0FAC?FAB ?Fy?0FACcos30??FABco s30??FTcos30??0FAC?FAB?FT?3kN 2 3-11 空间构架三根直杆铰接而成,如图3-36所示。
已 5知D端所挂重物的重量W=10kN,各杆自重不计。
试求杆AD、BD、CD所受的力。
图3-36 FADcos45??FBDcos45??0FAD?FBD ?FCDcos15??FADsin45?cos30??FBDsin45?cos30??0FCDcos15??2FADsin45?cos30?2FADsin45?cos30?FCD?cos15?FADsin45?sin30??FBDsin45 ?sin30??FCDsin15??W?02FADsin45?sin3 0??2FADsin45?cos30?tan15??W?0 ? Fx?0?Fy?0?Fz?0FADsin45?(1?3tan15?)?W?0 WFAD???sin45?(1?3tan15?)FCD?2sin45?cos30?W3 W??cos15?sin45?(1?3tan15?)cos15?(1?3ta n15?)?? 3-12 空间桁架如图3-37所示。
力F作用在ABDC平面内,且与铅垂线成45°角,ΔEAK≌ΔFBM,等腰三角形ΔEAK、ΔFBM和ΔNDB在顶点A、B和D处均为直角,又EC=CK=FD=DM。
若F=10kN,试求各杆的受力。
图3-37 结点A ?Fx?0F1cos45??F2cos45??0 F1?F2 ?Fy?0 F3?Fcos45??0 F3??Fcos45???52kN6 ?Fz?0?F1sin45??F2sin45??Fcos45??0F1?F2??F/2??5kN 结点B ?Fx?0F4cos45??F5cos45??0 F4?F5 ?Fy?0?Fz?0F6cos45??F3?0 F6?F32??10kN ?F5sin45??F4sin45? ?F6sin45??0F5?F4??F6/2?5kN3-13 三轮车连同上面的货物共重W=3kN,重力作用点通过C点,尺寸如图3-38所示。
试求车子静止时各轮对水平地面的压力。
图3-38 ?Mx?0FND??W??0 FND??W? ?My?0?FNB?1?FND??W??0 FNB???0??? ?Fz?0FNA?FNB?FND?W?0 FNA?W?FNB?FND? 3-14 如图3-39所示,三脚圆桌的半径r?500mm,重W?600N,圆桌的三脚A、B和C构成一等边三角形。
若在中线CD上距圆心为a的点M处作用铅垂力F=1500N,试求使圆桌不致翻倒的最大距离a。
7 图3-39 CD?ACsin60??3r?r33?r OD?CD?r? 222?MAB?0F?(a?OD)?W?OD?0rrF?(a?)?W??022Wrr600rrrra???????350mm2F22?1500252 3-15 简易起重机如图3-40所示,图中尺寸为AD=DB=1m,CD=,CM=1m,ME=4m,MS=,机身自重为W1=100kN,起吊重量W2=10kN。
试求A、B、C三轮对地面的压力。
图3-40 ?MAB?0FNC?CD?(W1?W2)? MD?0?110??? ?AD?FNB?AB? W1?(AD?MS)?W2?(ME?AD)?0FNC?(W1?W2)??Mx?0FNC?Fz?0FNAFN C?1?FNB?2?W1??W2?5?0100??10?5???2?FNB?FNC?W1?W2?0FNA?W1?W2?FNB?FNC?100?10???3-16 如图3-41所示,矩形搁板ABCD 可绕轴线AB转动,DE杆支撑于水平位置,撑杆DE两端均为铰链连接,搁板连同其上重物共重W=800N,重力作用线通过矩形板的几何中心。
已知:AB=,AD=,AK=BM=,DE=。
如不计杆重,试8 求撑杆DE所受的压力以及铰链K和M的约束反力。
图3-41 sin???? ?My?0W??FDEcos??AD?0 800??? ??1?W??FDEcos???0 FDE??Mx?0Fkz?800??????100N ?F z?0FMz?FKz?FDEcos??W?0FMz?W?FKz?FDEcos??800?100?400?50 0N ?Mz?0?Fkx?1?FDEsin???0 Fkx??FDEsin???? ?Fx?0FMx?FKx? FDEsin??0 FMx??FKx?FDEsin????? 3-17 曲轴如图3-42所示,在曲柄E处作用一力F=30kN,在曲轴B端作用一力偶M而平衡。