安普二相混合式步进电机技术参数
步进电机的选用及电机型号、参数、尺寸标准

步进电机是一种能将数字输入脉冲转换成旋转或直线增量运动的电磁执行元件。
每输入一个脉冲电机转轴步进一个步距角增量。
电机总的回转角与输入脉冲数成正比例,相应的转速取决于输入脉冲频率。
步进电机是机电一体化产品中关键部件之一,通常被用作定位控制和定速控制。
步进电机惯量低、定位精度高、无累积误差、控制简单等特点。
广泛应用于机电一体化产品中,如:数控机床、包装机械、计算机外围设备、复印机、传真机等。
选择步进电机时,首先要保证步进电机的输出功率大于负载所需的功率。
而在选用功率步进电机时,首先要计算机械系统的负载转矩,电机的矩频特性能满足机械负载并有一定的余量保证其运行可靠。
在实际工作过程中,各种频率下的负载力矩必须在矩频特性曲线的范围内。
一般地说最大静力矩Mjmax大的电机,负载力矩大。
选择步进电机时,应使步距角和机械系统匹配,这样可以得到机床所需的脉冲当量。
在机械传动过程中为了使得有更小的脉冲当量,一是可以改变丝杆的导程,二是可以通过步进电机的细分驱动来完成。
但细分只能改变其分辨率,不改变其精度。
精度是由电机的固有特性所决定。
论文天地欢迎您选择功率步进电机时,应当估算机械负载的负载惯量和机床要求的启动频率,使之与步进电机的惯性频率特性相匹配还有一定的余量,使之最高速连续工作频率能满足机床快速移动的需要。
选择步进电机需要进行以下计算:(1)计算齿轮的减速比根据所要求脉冲当量,齿轮减速比i计算如下:i=(φ.S)/(360.Δ) (1-1)式中φ---步进电机的步距角(o/脉冲)S ---丝杆螺距(mm)Δ---(mm/脉冲)(2)计算工作台,丝杆以及齿轮折算至电机轴上的惯量Jt。
Jt=J1+(1/i2)[(J2+Js)+W/g(S/2π)2] (1-2)式中Jt ---折算至电机轴上的惯量(Kg.cm.s2)J1、J2 ---齿轮惯量(Kg.cm.s2)Js ----丝杆惯量(Kg.cm.s2) W---工作台重量(N)S ---丝杆螺距(cm)(3)计算电机输出的总力矩MM=Ma+Mf+Mt (1-3)Ma=(Jm+Jt).n/T× 1.02×10ˉ 2 (1-4)式中Ma ---电机启动加速力矩(N.m)Jm、Jt---电机自身惯量与负载惯量(Kg.cm.s2)n---电机所需达到的转速(r/min)T---电机升速时间(s)Mf=(u.W.s)/(2πηi)×10ˉ 2 (1-5)Mf---导轨摩擦折算至电机的转矩(N.m)u---摩擦系数η---传递效率Mt=(Pt.s)/(2πηi)×10ˉ 2 (1-6)Mt---切削力折算至电机力矩(N.m)Pt---最大切削力(N)(4)负载起动频率估算。
步进电机型号及参数大全

步进电机型号及参数大全步进电机简介步进电机是一种将电脉冲转化为角位移的执行机构。
当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(称为“步距角”),它的旋转是以固定的角度一步一步运行的。
可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
步进电机可以作为一种控制用的特种电机,利用其没有积累误差(精度为100%)的特点,广泛应用于各种开环控制。
步进电机的分类可变磁阻式(VR型):转子以软铁加工成齿状,当定子线圈不加激磁电压时,保持转矩为零,故其转子惯性小、响应性佳,但其容许负荷惯性并不大。
其步进角通常为15°永久磁铁式(PM型):转子由永久磁铁构成,其磁化方向为辐向磁化,无激磁时有保持转矩。
依转子材质区分,其步进角有45°、90°及7.5°、11.25°、15°、18°等几种。
混和式(HB型):转子由轴向磁化的磁铁制成,磁极做成复极的形式,其乃兼采可变磁阻式步进电机及永久磁铁式步进电机的优点,精确度高、转矩大、步进角度小。
步进电机型号1、步进电机到底有多少型号?答:28.42.57.86.110.130.2、这些数字是代表电机尺寸大小吗?答:这些型号根据电机的底座的直径来命名的。
3、除了BYG还有哪些英文型号,分别代表什么意思?答:现在用的比较多的都是混合式步进电机了。
而且现在这种东西已经国产化了。
各个厂家的命名又有所不同。
所以不能给你提供更好的解释。
步进电机的基本参数1、电机固有步距角它表示控制系统每发一个步进脉冲信号,电机所转动的角度。
电机出厂时给出了一个步距角的值,这个步距角可以称之为“电机固有步距角”,它不一定是电机实际工作时的真正步距角,真正的步距角和驱动器有关。
2、步进电机的相数步进电机的相数是指电机内部的线圈组数,目前常用的有二相、三相、四相、五相步进电机。
步进电机说明书

2.4
1300
2.6
86BYG250B-03 2/4 4.3 2.5 1.7 9
3.2
2.4
1300
2.6
86BYG250B-04 2/4 5.4 2
2.7 15
3.2
2.4
1300
2.6
86BYG250C-01 2/4 2
7
0.29 2
4.8
3.6
1900
3.8
86BYG250C-02 2/4 4
2.2/1 2.2/2 2/4 1.5/6 1.2/8 1/10
90BYG250B 0.9º
4.5/1 4.5/2 3.1/4 2.0/6 1.4/8 0.6/10
90BYG250C 0.9º
6/1 5.6/2 4.5/4 3.2/6 2/8 1/10
驱动器 2HB1108MAE 2HB806MAE 2HB808MA
相 电 压 电 流 电 阻 电 感 保 持 转 定位转矩 转动惯量 机 身 长
数V
A
Ω
mH 矩 N.M Kg.cm
g.cm²
mm
2 9.6 0.4 24
36
0.17
0.15
20
25
2 12 0.4 30
37
0.25
0.20
38
34
2
8
0.8 10
17
0.32
0.22
57
40
2 3.84 1.2 3.2
转动惯量 g.cm² 60 145 230
重量 kg
0.45 0.65 1.0
机身长 mm 41 56 76
外型尺寸
接线图
注:轴为单扁丝,也可根据客户需要定做
L302-2数据手册
深圳市方远微测控科技有限公司步进电机驱动控制一体机数据手册型号:L302-2电话:086-0755-********传真:086-0755-********网址:邮箱:lccekong@L302-2驱动器使用手册安全注意事项1、安全说明◆驱动器只能由专业技术人员安装和操作。
◆严防意外事故的发生。
◆注意通用电器设备与机械设备的安装与配合。
◆避免电磁干扰。
2、注意事项◆信号电缆和电机电缆必须屏蔽、分别走线,距离越大效果越好。
◆电机电缆最长为50米。
◆信号电缆和电机电缆中多余线一定要剪掉并做绝缘处理。
◆电机电缆双端屏蔽,一端接电机外壳,另一端接驱动器外壳。
◆驱动器和电机外壳都需可靠接地。
◆驱动器必须在断电后,才能再次接线、安装和参数设置。
◆严禁带电对电机和驱动器进行任何参数设置和测量。
◆驱动器未接电机前,严禁通电。
◆驱动器的输入电压必须满足要求,由于电源电压过高或过低引起的驱动器或其他损失由用户自己负责。
◆通电前,要确保电源电缆、电机电缆、信号电缆连接的正确性。
◆严禁用户打开驱动器,打开的驱动器失去保修资格。
1.1概述L302-2两相步进电机驱动器,适配4、6、8出线,电流在2A以下、外径42以下的各种型号的二相混合式步进电机。
它具有输入电压宽、体积小、平稳性好、低成本等优点。
广泛运用于雕刻机、电子加工设备、激光打标机等小型数控设备上。
1.2 特点●宽电源输入,电压范围:DC12-30V●细分数1、2、4、8、16、32、64、128●输入信号光隔离,脉冲最高反应频率可达500Kpps●低价格、高性能1.3 电气特性输入电压DC12-30V输入电流小于2安培输出电流 0A~2A(相电流)功耗小于功耗:20W;内部保险:5A温度工作环境温度应小于50℃;存放温度-40℃~70℃;驱动器工作时外壳允许最高温度为75℃湿度不能结露,不能有水珠气体禁止有可燃气体和大量导电灰尘1.4 输入输出信号特点及接线1.4.1输入信号电气性能所有输入信号都采用高速光电隔离,为确保内置高速光耦可靠导通,要求提供控制信号的电流驱动能力至少15mA。
2相步进电机参数介绍

2相步进电机参数介绍(1)步距角和静态步距误差2相步进电机的步距角是决定开环伺服系统脉冲当量的重要参数,数控机床中常见的反应式步进电机的步距角一般为0.5°~3°;一般情况下,步距角越小,加工精度越高。
静态步距误差指理论的步距角和实际的步距角之差,以分表示,一般在10’之内。
步距误差主要由步进电机齿距制造误差,定子和转子间气隙不均匀以及各相电磁转矩不均匀等因素造成的。
步距误差直接影响工作的加工精度以及步进电机的动态特性。
(2)启动频率:空载时,2相步进电机由静止突然启动,并能不丢步地进入正常运行所允许的最高频率,称为启动频率或突跳频率。
若启动时步进电机定子绕组通电状态变化频率大于启动频率,步进电机就不能正常启动。
启动频率与负载惯量有关,一般说随着负载惯量的增长而下降。
(3)连续运行的最高工作频率2相步进电机连续运行时,它所能接受的,即保证不丢步运行的极限频率, 称为最高工作频率。
最高工作频率是决定定子绕组通电状态最高变化频率的参数,它决定了2相步进电机的最高转速。
其值远大于启动频率。
最高工作频率随负载的性质和大小而异,与驱动电源也有很大关系。
(4)加减速特性。
2相步进电机的加减速特性是描述2相步进电机由静止到工作频率和由工作频率到静止的加减速过程中,定子绕组通电状态的变化频率与时间的关系。
当要求2相步进电机启动到大于突跳频率的工作频率时,变化速度必须逐渐上升;同样,当要求步进电机从最高工作频率或高于突跳频率的工作频率停止时,变化速度必须逐渐下降。
逐渐上升或下降的加速时间、减速时间不能过小,否则会出现失步或超步。
一般用加速时间常数Ta和减速时间常数Td来描述步进电机的升速和降速特性(5)矩频特性与动态转矩矩频特性是描述2相步进电机连续稳定运行时,输出转矩Md与连续运行频率f之间的关系。
矩频特性曲线上每一个频率所对应的转矩称为动态转矩。
动态转矩随连续运行频率的上升而下降下。
上述2相步进电机的主要特性,除步距角和静态步距误外,其余均与驱动电源有很大关系。
混合步进电机

圆形电机备注:圆形电机系列注:1.打*者为正在开发的新产品,可供期货;型号后有“Z”者为增强型。
2.二相电机为四引出线,四相电机为八引出线,除出线方式不同外,其余参数性能完全一样,配本公司驱动电源时用二相电机。
四相电机可改接成二相电机,有串联、并联及单极性三种接法,按并联接法时,相电流应加倍,四相电机用并联接法时,高速性能要优于其它接法。
本公司产品中除42#、57#外,其余均已按并联接法接成二相电机。
3.五相电机用五边形接法及三相电机用三角形接法时,驱动器电流应提高至表列相电流的1.7倍。
五相及三相电机用星形接法时驱动器电流为相电流。
五相电机用全桥驱动器及三相电机用三角形接法时,电机高速性能要优于其它接法,但温升略高。
本公司三相电机除130BYG3501B/D和130BYG3502B/D 为星形接法外,其余已接成△型接法,五相电机型号后有“WB”;“WZ”;“WJ”标志的为五边型接法,有“X”标志者为星型接法。
4.表中驱动电压为带有参考意义的标准电压,电机可在低于标准电压或略高于标准电压的范围内正常使用,其值主要取决于驱动器。
在力矩富裕的前提下,尽可能用较小的驱动电压和电流,以降低电机温升。
5.二相及三相电机若用220V输入电压驱动时一定要接地保护。
6.三相电机配MS型三相驱动电源可按以下步距角细分运行:0.9°、0.72°、0.6°、0.45°、0.36°、0.3°、0.225°、0.18°、0.15°、0.12°、0.09°、0.072°、0.06°、0.05625°、0.045°、0.036°7.表中空载起动频率及空载运行频率为半步工作状态下的参数。
8.表中所列为基本产品,可进行轴派生,端盖派生,电器派生等,可承制一些特殊规格的电机。
两相混合式步进电机驱动器HSM20504A说明书
驱动器接口功能和使用方法
P1 输入信号接口描述
P2 输出及强电接口描述
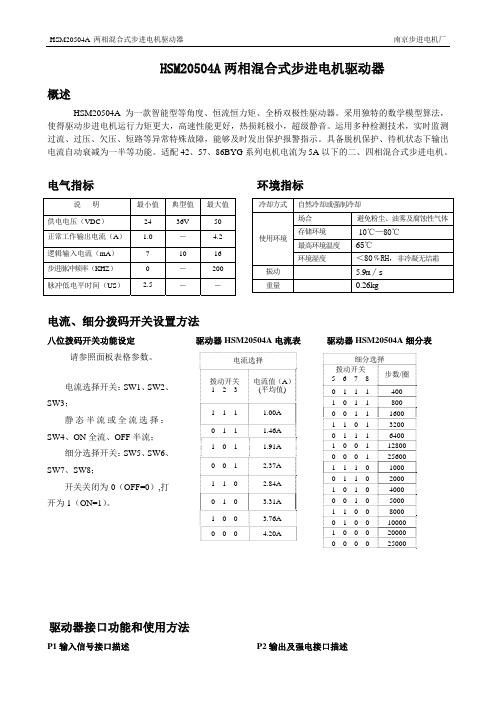
HSM20504A 两相混合式步进电机驱动器
标记符号 功 能 详情描述
PLS+
输入信号光 接+5V 供电电源,+5V~+24V 均可驱动, 电隔离正端 高于+5V 需接限流电阻。
LS- 步进脉冲信 下降沿有效,每当脉冲由高变低时电机
宽度﹥2.5US.
ENA+ 输入信号光 接+5V 供电电源,+5V~+24V 均可驱动, 电隔离正端 高于+5V 需接限流电阻。
ENA-
电机释放信 有效(低电平)时关断电机线圈电流,
号
驱动停止工作,电机处于自由状态。
信号波形和时序
典型接线图
名称 功能
A+、 AB+、 B-
电机 接线
南京步进电机厂 详细说明
-10℃—80℃ 65℃ <80﹪RH,非冷凝无结霜 5.9m∕s
0.26kg
电流、细分拨码开关设置方法
八位拨码开关功能设定 请参照面板表格参数。
驱动器 HSM20504A 电流表
电流选择
电流选择开关:SW1、SW2、 SW3;
静态半流或全流选择: SW4、ON 全流、OFF 半流;
细分选择开关:SW5、SW6、 SW7、SW8;
3、 电源接通时绿色指示灯 PWR 亮。 4、 当以上保护功能启动时,电机轴转动无自锁力,电源指示灯变红,若要恢复正常工作,需确认以上故
障消除,然后电源重新上电,电源指示灯变绿,电机轴被锁紧,驱动器恢复正常。
+V GND
直流 电流输
入
DC24-50V 之间,具体参数详见电机参数
两相步进电机详细参数及接线图
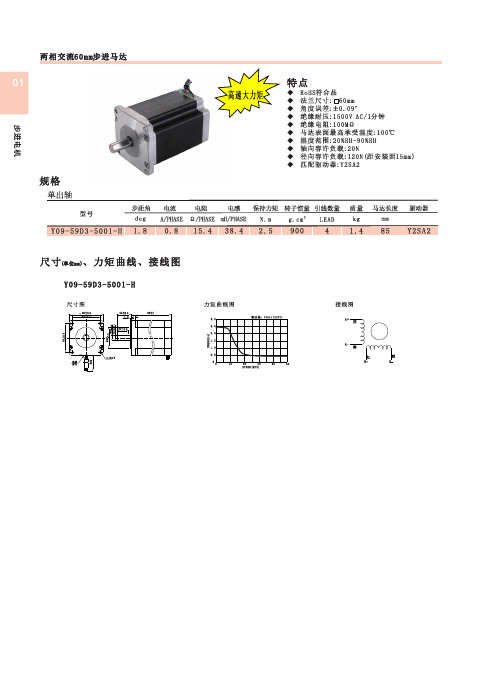
特点◆ 径向容许负载:90N(距安装面15mm)◆ RoHS 符合品◆ 安装孔距:47.14mm◆ 绝缘电阻:100MΩ◆ 匹配驱动器:Y2SD2◆ 马达表面最高承受温度:100℃◆ 湿度范围:20%RH-90%RH◆ 绝缘耐压:500V AC /1分钟◆ 角度误差:±0.09°◆ 轴向容许负载:20N◆ 法兰尺寸:□60mm规格型号步距角电流deg A/PHASE Ω/PHASE 电阻电感mH/PHASE 保持力矩 N.m 转子惯量引线数量LEAD 质量kg 马达长度mm机械尺寸(单位mm )2g.cm 驱动器A+A-B+B-棕橙红黄01020304000.20.40.60.81.01.2SPEED(RPS)T O R Q U E (N .m )5024V 36V 48V 驱动器:Y2SD2标配连接线:长度300min力矩曲线0510152000.51.01.52.02.53.0SPEED(RPS)T O R Q U E (N .m )2524V 36V 48V 驱动器:Y2SD2接线图010********.30.60.91.21.51.8SPEED(RPS)T O R Q U E (N .m )5024V 36V 48V 驱动器:Y2SD2Y09-59D3-1305-PY09-59D3-3305-P Y09-59D3-5001-P0.61.2 1.81.22.43.61.83.6 5.42.44.87.23.06.09.03.67.210.8SPEED(RPS)SPEED(RPS)SPEED(RPS)24V 24V 24V 48V 48V 48V 60V 60V 60V 驱动器:Y2SD3(并联6A)驱动器:Y2SD3(并联6A)驱动器:Y2SD3(并联6A)◆ 绝缘耐压:1500V AC /1分钟特点◆ 绝缘电阻:100MΩ◆ 马达表面最高承受温度:100℃◆ 轴向容许负载:60N◆ 径向容许负载:320N(距安装面20mm)◆ 湿度范围:20%RH-90%RH◆ RoHS 符合品◆ 匹配驱动器:Y2SD3 or Y2SA2◆ 法兰尺寸:□86mm◆ 角度误差:±0.09°规格型号步距角电流deg A/PHASE Ω/PHASE 电阻电感mH/PHASE 保持力矩 N.m 转子惯量引线数量LEAD 质量kg 马达长度mm机械尺寸(单位mm )2g.cm 驱动器力矩曲线000555101010151515202020000T T T O O O R R R Q Q Q U U U E E E (((N N N ...m m m )))252525并联直流驱动型号步距角电流deg A/PHASE Ω/PHASE 电阻电感mH/PHASE 保持力矩 N.m 转子惯量引线数量LEAD 质量kg 马达长度mm2g.cm 驱动器串联交流驱动Y09-59D3-7430-PY09-59D3-7536-P Y09-59D3-7655-P102030400.61.2 1.81.22.43.61.83.6 5.42.44.87.23.06.09.03.67.210.8SPEED(RPS)SPEED(RPS)SPEED(RPS)50驱动器:Y2SA2(220VAC,串联3A)驱动器:Y2SA2(220VAC ,串联3A)驱动器:Y2SA2(220VAC ,串联3A)00055101015152020000T T T OO O RR R QQ Q U U U EE E (((NN N ...mm m )))2525接线图A+A-A+A-B+B-黑绿红蓝黄橙白棕并联接线串联接线Y09-59D3-7430-P Y09-59D3-7536-P Y09-59D3-7655-P。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
6
7.0
0.47
6000
112
5.8
4
110HS2A150-604-01
20
6
18.5
1.15
11000
150
8.4
4
110HS2A165-704-01
24
7
14
0.65
13000
165
9.5
4
外形图Figure(1):35HS2A相关系列
外形图Figure(2):
型号
轴径D
键槽
42HS2A33-054
外形图Figure(4):
外形图Figure(5):
型号
轴径D
键槽
70HS2A60-258
φ12
双平台1×20
70HS2A90-258
φ14
双平台1×20
外形图Figure(6):
型号
轴径D
键槽
86HS2A65-208-01
φ9.5
单平台0.8×25
86HS2A80-308-01
φ12.7
单平台1×25
4.5
3/6
3.6
0.8
1400
80
2.3
8
86HS2A101-504-01
6
5
4.9
0.52
2300
101
3.25
4
86HS2A118-308-01
8.5
3/6
4.4
0.87
2800
118
3.8
8
86HS2A156-308-01
12
3/6
6.4
1.12
4000
156
5.4
8
110HS2A115-604-01
Inductance
/Phase
相阻抗±10%
Resistamce
/Phase
转子惯量
Rotor
Inertia
机身长度L
Motor
length
重量
Motor
Weight
引线数量
# of
leads
N.m
A
mH
Ohms
g.cm 2
mm
Kg
35HS2A-27-084
0.12
0.8
5
5
11
27
0.12
4
35HS2A34-084
Rotor
Inertia
机身长度L
Motor
length
重量
Motor
Weight
引线数量
# of
leads
N.m
A
mH
Ohms
g.cm 2
mm
kg
35HM2A27-084
0.09
0.8
4.2
4.5
12
27
0.13
4
35HM2A34-084
0.14
0.8
10
6
18
34
0.19
4
42HM2A33-104
56
0.68
8
57HS2A76-288
1.5
2.8
1.73
1.0
380
76
1.05
8
57HS2A76-304
1.8
3.0
1.8
0.5
440
76
1.05
4
57HS2A80-358
2.0
3.5
1.8
0.7
460
81
1.1
8
57BYG007
0.3
0.38
30
32
60
41
0.45
6
57BYG059
0.6
1.6
0.18
0.8
9.8
6.5
13
34
0.16
4
42HS2A33-054
0.28
0.5
30
30
35
34
0.22
4
42HS4A38-126
0.28
1.2
2.7
3.2
54
38
0.28
6
42HS2A47-174
0.45
1.7
1.68
2.5
68
47
0.35
4
57HS2A56-288
1.0
2.8
1.2
0.8
280
φ19
6×35
接线图Wiring Diagram:
8线电机接线方法
0.24
1.0
2.8
2.1
34
33
0.22
4
42HM4A38-126
0.26
1.2
2.7
3.2
54
38
0.28
6
42HM2A47-174
0.42
1.7
1.8
1.2
68
47
0.35
4
57HM2A56-254
1.0
2.5
5.2
1.3
280
56
0.68
4
57HM2A76-304
1.5
3
4.3
1.0
440
76
φ5
光轴
42HS2A38-126
φ5
光轴
42HS2A47-174
φ5
光轴
外形图Figure(3):
型号
轴径D
键槽
57HS2A45-204
φ8
单平台0.8×15
57HS2A56-288
φ6.35
单平台0.8×15
57HS2A76-288
φ6.35
单平台0.8×15
57HS2A76-304
φ6.35
单平台0.8×15
86HS2A101-504-01
φ12.7
5×25
86HS2A118-308-01
φ12.7
5×25
86HS2A156-308-01
φ15.875
5×25
外形图Figure(7):
型号
轴径D
键槽
110HS2A115-604-01
φ19
6×35
110HS2A150-604-01
φ19
6×35
110HS2A165-604-01
3.5
2.5
145பைடு நூலகம்
56
0.65
6
57BYG071
0.95
1.6
5
3.2
230
76
1
6
70HS2A60-258
2
2.5
1.6
0.5
350
60
0.9
8
70HS2A90-258
4
2.5
2.6
0.73
700
90
1.5
8
86HS2A65-208-01
3.5
2/4
3.9
1.4
800
65
2
8
86HS2A80-308-01
1.05
4
外形图Figure(1):35HM2A相关系列
外形图Figure(2):
型号
轴径D
键槽
42HM2A33-104
φ5
光轴
42HM2A38-126
φ5
光轴
42HM2A47-174
φ5
光轴
外形图Figure(3):
型号
轴径D
键槽
57HM2A45-106
φ6.35
平台0.8×15
57HM2A56-254
φ6.35
平台0.8×15
57HM2A76-304
φ6.35
平台0.8×15
接线图Wiring Diagram:
1.8 °二相混合式步进电机
Electrical Specification技术规格
型号
Model No.
最大静扭矩
±10% Holding
Torque
额定电流
Current
/Phase
相感抗±20%
二相混合式技术参数
0.9 °二相混合式步进电机
Electrical Specification技术规格
型号
Model No.
最大静扭矩
±10% Holding
Torque
额定电流
Current
/Phase
相感抗±20%
Inductance
/Phase
相阻抗±10%
Resistamce
/Phase
转子惯量