四线电阻触摸屏校准算法小结
电阻式触摸屏校准算法分析
电阻式触摸屏校准算法分析<一> 算法分析电阻式触摸屏在X,Y坐标方向上是线性的,比如S32采用的触摸屏,理论上Xmin=0,Xmax=1023,Ymin=0,Ymax=1023。
但是实际的触摸屏,往往是xmin>0,xmax<1023,ymin>0,ymax<1023。
所以就需要校准。
此文讨论的校准算法,其原理就是利用触摸屏的线性特性,针对被校准的触摸屏,获取其真正的x,y的范围,即xmin,ymin,xmax,ymax将其记录下来。
以后当触摸事件发生,将触摸屏报告的原始坐标(x,y)按比例投射到0~1023的坐标上即可。
注意,TP与LCD在相同的坐标方向上,具有相似性,即比例一致性。
看看对原始坐标的处理:If (x<xmin) x=0;Else if (x>xmax) x=xmax-xmin;Else x=1023*(x-xmin)/(xmax-xmin);If (y<ymin) y=0;Else if (y>ymax) y=ymax-ymin;Else y=1023*(y-ymin)/(ymax-ymin);可见,对原始坐标,先减去一个0位置的偏移量(x-xmin),然后求得它X范围上的比率((x-xmin)/(xmax-xmin)),再乘以1023,就得到了投射到(0~1023)上的坐标。
再看看校准算法。
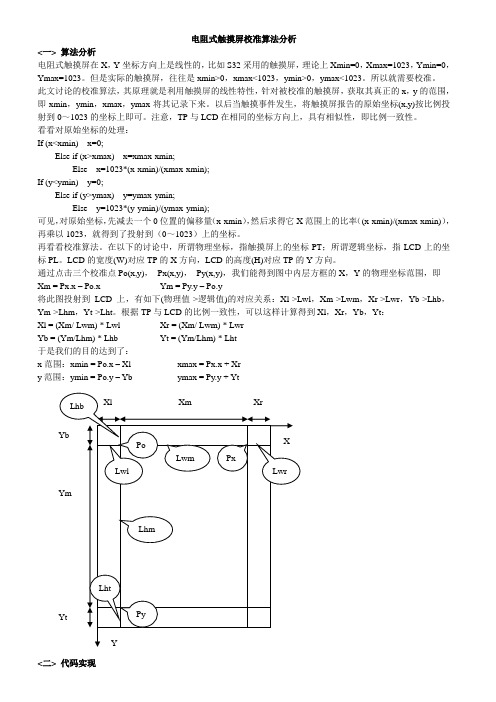
在以下的讨论中,所谓物理坐标,指触摸屏上的坐标PT;所谓逻辑坐标,指LCD上的坐标PL。
LCD的宽度(W)对应TP的X方向,LCD的高度(H)对应TP的Y方向。
通过点击三个校准点Po(x,y),Px(x,y),Py(x,y),我们能得到图中内层方框的X,Y的物理坐标范围,即Xm = Px.x – Po.x Ym = Py.y – Po.y将此图投射到LCD上,有如下(物理值->逻辑值)的对应关系:Xl->Lwl,Xm->Lwm,Xr->Lwr,Yb->Lhb,Ym->Lhm,Yt->Lht。
电阻触摸屏三点校准法
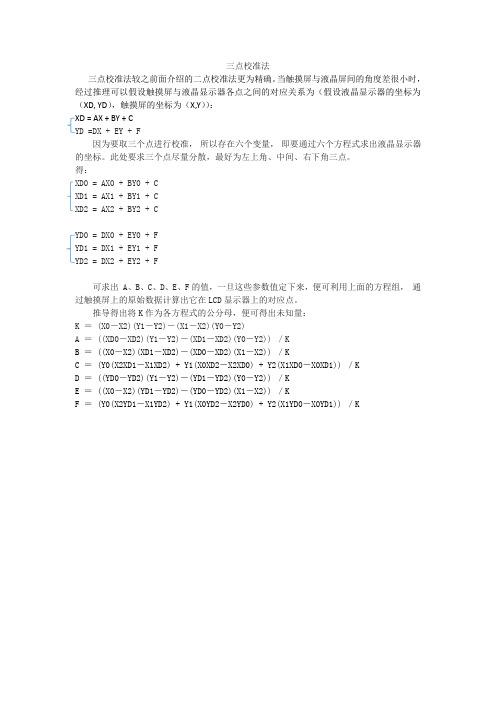
三点校准法三点校准法较之前面介绍的二点校准法更为精确。
当触摸屏与液晶屏间的角度差很小时,经过推理可以假设触摸屏与液晶显示器各点之间的对应关系为(假设液晶显示器的坐标为(XD, YD),触摸屏的坐标为(X,Y)):XD = AX + BY + CYD =DX + EY + F因为要取三个点进行校准,所以存在六个变量,即要通过六个方程式求出液晶显示器的坐标。
此处要求三个点尽量分散,最好为左上角、中间、右下角三点。
得:XD0 = AX0 + BY0 + CXD1 = AX1 + BY1 + CXD2 = AX2 + BY2 + CYD0 = DX0 + EY0 + FYD1 = DX1 + EY1 + FYD2 = DX2 + EY2 + F可求出 A、B、C、D、E、F的值,一旦这些参数值定下来,便可利用上面的方程组,通过触摸屏上的原始数据计算出它在LCD显示器上的对应点。
推导得出将K作为各方程式的公分母,便可得出未知量:K = (X0-X2)(Y1-Y2)-(X1-X2)(Y0-Y2)A = ((XD0-XD2)(Y1-Y2)-(XD1-XD2)(Y0-Y2))/KB = ((X0-X2)(XD1-XD2)-(XD0-XD2)(X1-X2))/KC = (Y0(X2XD1-X1XD2) + Y1(X0XD2-X2XD0) + Y2(X1XD0-X0XD1))/KD = ((YD0-YD2)(Y1-Y2)-(YD1-YD2)(Y0-Y2))/KE = ((X0-X2)(YD1-YD2)-(YD0-YD2)(X1-X2))/KF = (Y0(X2YD1-X1YD2) + Y1(X0YD2-X2YD0) + Y2(X1YD0-X0YD1))/K。
屏幕4点校准算法

屏幕4点校准算法介绍屏幕4点校准算法是一种用于校准触摸屏幕的方法。
通过测量用户点击屏幕时的坐标,并与屏幕上实际显示的坐标进行比较,可以计算出触摸屏幕的误差,并进行校准,从而提高触摸屏幕的准确性和灵敏度。
本文将详细介绍屏幕4点校准算法的原理、步骤和应用。
原理屏幕4点校准算法的原理基于触摸屏幕在不同位置的响应误差是不一样的。
通常情况下,由于制造过程中的一些偏差和材料差异,触摸屏幕在边缘和角落的响应误差较大,而在中心位置的响应误差较小。
因此,通过在触摸屏幕的四个角落进行校准,可以得到一个精确的校准参数,从而减小触摸屏幕的误差。
步骤屏幕4点校准算法的步骤如下:步骤1:选择参考点首先,需要选择四个参考点,一般选取屏幕的四个角落。
这四个参考点的坐标需要事先确定,并且要尽可能分布在屏幕的不同位置。
步骤2:用户操作用户需要按照指示在屏幕上分别点击四个参考点位置。
系统会记录下用户点击时的坐标。
步骤3:计算校准参数根据用户点击时的坐标和事先确定的参考点坐标,可以计算出校准参数。
校准参数可以通过线性插值或者其他数学模型得到,具体的计算方法要根据具体情况而定。
步骤4:应用校准参数最后,将计算出的校准参数应用到触摸屏幕上,以校正触摸屏幕的误差。
校准参数可以通过软件或者硬件的方式进行应用。
应用屏幕4点校准算法广泛应用于各类触摸屏设备,例如智能手机、平板电脑、工控机等。
通过校准触摸屏幕,可以提高用户的触控体验,减少误操作,并且可以精确地控制光标的位置。
总结屏幕4点校准算法是一种用于校准触摸屏幕的方法,通过选择参考点、用户操作、计算校准参数和应用校准参数等步骤,可以提高触摸屏幕的准确性和灵敏度。
该算法广泛应用于各类触摸屏设备,可以改善用户的触摸体验。
电阻技术触摸屏的校正算法及应用编程设计

Y B=Y A 4 K ( B Y L L Y Y — A) -
由式 2 2我们 可 以推 出计 算 K系数 的公式 —
K = X B— A ) × — A) X ( L XL / B X (
K = Y B— A) Y — A) Y ( L YL / B Y (
3触摸屏应用的编程思路
维普资讯
21穰 述 , 窳 薪 周知 ,基于 电阻技 术触摸 屏分 为四线 电阻触 摸
屏 、 线 电阻触摸 屏或 更多线 电阻触 摸屏 , 薹 但无 论哪一 类
电阻触摸屏都有一个最大共性. 电压成线性均匀分布 正
圉21 —
222逻辑坐标 的计算 . 由于 电阻式触摸 屏的 电压 成线 性均匀 分布 ,那 么 ~ D转换 后 的坐标 也成线 性。假 如我们 将液晶 最左 下角点 221物理坐 标和逻辑 坐标 . 对应 的触撞 屏上 的点定 为物 理坐标 原点 A其 物理坐 标记
式 2 —1
K ={ L —Y C )Y —Y +Y B L / B D) Y ( A L / A C)(L —Y D)Y —Y J Y ( ( / 2 ( 将 C 点逻 辑 坐标 作 为基 坐 标 , 据 式 2 2 触 摸屏 6) 根 — 则 上任 意 一点 F 逻辑 坐标 与基 坐标 的 关系 为 : X F=X C 4K (F—X ) L L XX - C Y F=Y C 4K (F—Y ) L L YY - C 式 24 —
B t n的矩 形 区域 内。 ut o 如果 液 晶上 有若 干 个 B t n区域 , 么我 们将 每 个 ut o 那
() 1 首先在 A C E对 应 的位 置 逐步 用尖状 物触 摸 , 到 B D 得
四线电阻式触摸屏控制与校准

Bottom film with transparent conductor on top side
YX+ Insulating material (usually glass)
Conductive bar
2008 年 12 月 17 日
文件编号 001-50412 版本 **
1
[+] Feedback
触摸屏结构
四线触摸屏的结构如图 1 所示,由两个透明层构成,透明 层的内表面均涂了薄薄一层导电材料。当触摸屏表面受到的 压力(如通过触笔或手指进行按压)足够大时,顶层与底层 之间会产生接触,从而使电阻层发生接触。
图 1. 四线触摸屏结构
Top film with transparent conductor on bottom side Y+ X-
前言
电阻式触摸屏广泛用于各种类型的设计中。其结构简单,成 本低,且使用方法易于被用户掌握。虽然操作简单,但触摸 屏器件几乎都要求进行校准,以便将触摸屏坐标转换成实际 屏幕坐标(LCD 或其它)。
第一种测量方法
触摸可以由三个参数界定。第一和第二参数分别是 X 触摸 点位置和 Y 触摸点位置。第三参数即为“触摸压力”,可 使触摸屏区分手指接触和触笔接触。图 2 说明的是被触摸 和未被触摸的屏幕的等效电路。 每个测量周期均采用不同的电压组合。在本项目中,触摸屏 接 Vdd 是指切换 PSoC® 端口驱动模式为 “strong” 并把逻辑 值设为 “high”。接地是指将端口驱动模式设为 “strong” 并把 逻辑值设为 “low” 。 PSoC® 输出级漏电阻较低,其感应也 小。校准算法可以对这种差异进行补偿。
R g (U t − U x ) ; Rt = ext U cc − U y
电阻式触摸屏数据校准的一种补偿算法
【 关键词】 触摸屏 ;C 坐标 ; : L D; 补偿 ; 算法
l 引 言 、
P=KX O Y X ' 、+ + T o[. -  ̄ + le X KY Y】 T K
即:
P= KR oO O R iO X , s 0 e cs+ T D【 cs- K s + TK i + KR oOY ] n n
根 据 式 1得 :.
XI AXlBYl C ) l = + + Xm AX2 BY + = + !C
Ym=DX EYo +F
Ym= DXIE + + YIF
Ym= DX +EY2+F
由上 面的 方 程 得 到 :
K (0x (-Y)( - Y— 1 =) 一 _Y- 2 XrX (oY 【 9 - j
【 陈文智. 2 】 嵌入 式 系统 开发原 理与 实践. 北京 : 清华 大学 出版社 ,0 5 20 :
2 0 5
[林晓飞, 3 】 林兵 , 张辉 . 于 AR 嵌 入 式 Ln x应 用 开发 与 实例 教 程 . 基 M iu 清
华 大 学 出版 社 . 0 :2 — 3 2 724 22 0
A:—
( D -k z Y - :- x ( o . ) , Y ) ( m-x : Y - : x % ( o) o Y ) ( )
—
B:—
i , ., ( - ) ( o - o ( -x: f , - ̄ 0 xo x:- x o x O x, x, ) )
—
,、一
f o XJ X,v) I X : Y (  ̄ 一 X :+Y( o 一X: z) : X 0 Xo o ) X: , Xo X ̄ +Y ( o 一 X O o Xt (Y, Y O Y - 2-(o- m) o Y ) (o - o ( , Y ) Y , Y ( - : ) Y )
四线电阻触摸屏校准算法小结
4 -2得yfac = (Y2 -Y1)/(y2 -y1); //得到y轴方向的比例因子
4 + 2得yoff = [(Y2 + Y1)-yfac(y2 + y1)]/2; //得到y轴方向的偏移量
有如下方程组:
X1 = xfac * x1 + xoff; // 1
Y1 = yfac * y1 + yoff; // 2
X2 = xfac * x2 + xoff; // 3
Y2 = yfac * y2 + yoff; // 4
解得:
3 -1得xfac = (X2 -X1)/(x2 -x1); //得到x轴方向的比例因子
OK!所谓的三点触摸校准,四点触摸校准只不过是加了可靠的滤波算法,因为触摸笔和屏
的接触不是很准确的!而像素点是很小的,所以通常都用四点校准,而且经验证这此算法是
必须加的,否则很不准,参见STM32学习笔记相关实验实验例程,已验证通过理论知识:
*触摸屏实际是在普通的lcd上贴了一个触摸膜,没有原生的触摸屏
B=(Xt[0]-Xt[2])*(Xd1-Xd2)-(Xd0-Xd2)*(Xt[1]-Xt[2]);
C=Yt[0]*(Xt[2]*Xd1-Xt[1]*Xd2)+Yt[1]*(Xt[0]*Xd2-Xt[2]*Xd0)+Yt[2]*(Xt[1]*Xd0-Xt[0]*Xd1);
D=(Yd0 -Yd2)*(Yt[1] -Yt[2]) -(Yd1 -Yd2)*(Yt[0] -Yt[2]);
有3个未知数abc,显然需要3个方程
触摸屏校准常用算法分析_许荣斌

.4-&)VQ] .&9I-5)--)NVa/3‘--)JV_ : ]FAB_ ; .4-&)WQ] .&9I-5)--)NWa /3‘--)JW_ : ]ARB_ ;
计算触摸屏中此按钮的左上角坐标 ]5O--)’V@, R) 5O--)’W@_ 和 右下角坐标 ]5O--)’VA, 5O--)’WA_:
3..VQ+ONVXXR 3..WQ+ONWXXR
触摸屏校准常用算法分析 关系, 进行校准。
!
触摸屏的校准举例 假 设 液 晶 屏 ]FAB^ARB_ 中 有 一 个 实 心 矩 形 作 为 按 钮 , 此实
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
X1 = xfac * x1 + xoff; // 1
Y1 = yfac * y1 + yoff; // 2
X2 = xfac * x2 + xoff; // 3
Y2 = yfac * y2 + yoff; // 4
解得:
3 -1得xfac = (X2 -X1)/(x2 -x1); //得到x轴方向的比例因子
OK!所谓的三点触摸校准,四点触摸校准只不过是加了可靠的滤波算法,因为触摸笔和屏
的接触不是很准确的!而像素点是很小的,所以通常都用四点校准,而且经验证这此算法是
必须加的,否则很不准,参见STM32学习笔记相关实验实验例程,已验证通过理论知识:
*触摸屏实际是在普通的lcd上贴了一个触摸膜,没有原生的触摸屏
E=(Xt[0] -Xt[2])*(Yd1 -Yd2) -(Yd0 -Yd2)*(Xt[1] -Xt[2]);
F=Yt[0]*(Xt[2]*Yd1 -Xt[1]*Yd2) + Yt[1]*(Xt[0]*Yd2 -Xt[2]*Yd0) + Yt[2]*(Xt[1]*Yd0 -Xt[0]*Yd1);
2012-8-源代码中给M[0]~M[2]赋值,然后x[0]等是
从驱动读数,最后解方程即可
最后abc表达式,
F= (Xt[0] -Xt[2])*(Yt[1] -Yt[2]) -(Xt[1] -Xt[2])*(Yt[0] -Yt[2]);
//计算参数
A=(Xd0-Xd2)*(Yt[1]-Yt[2])-(Xd1-Xd2)*(Yt[0]-Yt[2]);
四线电阻触摸屏校准算法的实现
(一)
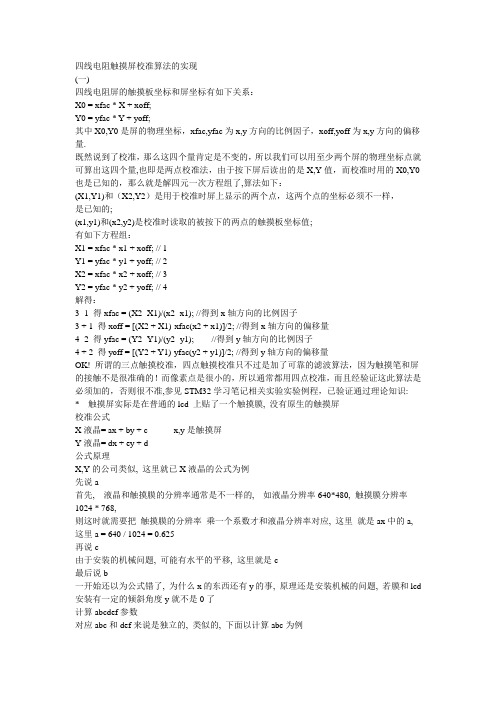
四线电阻屏的触摸板坐标和屏坐标有如下关系:
X0 = xfac * X + xoff;
Y0 = yfac * Y + yoff;
其中X0,Y0是屏的物理坐标,xfac,yfac为x,y方向的比例因子,xoff,yoff为x,y方向的偏移
量.
既然说到了校准,那么这四个量肯定是不变的,所以我们可以用至少两个屏的物理坐标点就
可算出这四个量,也即是两点校准法,由于按下屏后读出的是X,Y值,而校准时用的X0,Y0
也是已知的,那么就是解四元一次方程组了,算法如下:
(X1,Y1)和(X2,Y2)是用于校准时屏上显示的两个点,这两个点的坐标必须不一样,
是已知的;
(x1,y1)和(x2,y2)是校准时读取的被按下的两点的触摸板坐标值;
有3个未知数abc,显然需要3个方程
M[0] = A * x[0] + B * y[0] + C
M[1] = A * x[1] + B * y[1] + C
M[2] = A * x[2] + B * y[2] + C
M[0]~M[2]代表lcd的坐标, x[0]~x[2], y[0]~y[2]是触摸膜坐标
这里a = 640 / 1024 = 0.625
再说c
由于安装的机械问题,可能有水平的平移,这里就是c
最后说b
一开始还以为公式错了,为什么x的东西还有y的事,原理还是安装机械的问题,若膜和lcd
安装有一定的倾斜角度y就不是0了
计算abcdef参数
对应abc和def来说是独立的,类似的,下面以计算abc为例
校准公式
X液晶= ax + by + c x,y是触摸屏
Y液晶= dx + ey + d
公式原理
X,Y的公司类似,这里就已X液晶的公式为例
先说a
首先,液晶和触摸膜的分辨率通常是不一样的,如液晶分辨率640*480,触摸膜分辨率
1024 * 768,
则这时就需要把触摸膜的分辨率乘一个系数才和液晶分辨率对应,这里就是ax中的a,
3 + 1得xoff = [(X2 + X1)-xfac(x2 + x1)]/2; //得到x轴方向的偏移量
4 -2得yfac = (Y2 -Y1)/(y2 -y1); //得到y轴方向的比例因子
4 + 2得yoff = [(Y2 + Y1)-yfac(y2 + y1)]/2; //得到y轴方向的偏移量
B=(Xt[0]-Xt[2])*(Xd1-Xd2)-(Xd0-Xd2)*(Xt[1]-Xt[2]);
C=Yt[0]*(Xt[2]*Xd1-Xt[1]*Xd2)+Yt[1]*(Xt[0]*Xd2-Xt[2]*Xd0)+Yt[2]*(Xt[1]*Xd0-Xt[0]*Xd1);
D=(Yd0 -Yd2)*(Yt[1] -Yt[2]) -(Yd1 -Yd2)*(Yt[0] -Yt[2]);