舞蹈机器人制作
人工智能机器人在舞台表演中的惊艳表现
人工智能机器人在舞台表演中的惊艳表现人工智能技术的不断发展和应用,已经深入到了各个领域。
其中,人工智能机器人在舞台表演中的惊艳表现,令人为之倾倒。
这些智能机器人能够通过高度精确的算法和先进的传感器技术,实现令人难以置信的舞蹈、音乐表演和互动体验。
本文将探讨人工智能机器人在舞台表演中的惊艳表现,并探索未来的发展趋势。
一、机器人的舞蹈技艺人工智能机器人在舞台表演中所展现出来的舞蹈技艺,令人叹为观止。
这些机器人能够通过复杂的编程和算法,模仿人类舞者的动作和形态,并实现高度精准的舞蹈。
它们能够自主进行肢体动作的协调和平衡,使得整个表演更加精彩动人。
机器人的舞蹈技艺不仅限于传统的舞蹈形式,还可以展现出前所未有的创新和想象力。
利用先进的机械和电子技术,这些机器人能够实现人类难以完成的舞蹈动作,比如高难度的翻跟头、旋转等。
同时,它们还能够与其他机器人进行协同舞蹈,呈现出更加复杂和精美的舞蹈场景。
二、机器人的音乐演奏能力除了舞蹈技艺,人工智能机器人还具备出色的音乐演奏能力。
它们能够通过预先加载的音乐数据和算法,进行精准的乐器演奏,如钢琴、小提琴等。
机器人在演奏过程中,能够实时调整音量、速度和音调,使音乐更加动听和和谐。
与此同时,机器人还能够实现多个乐器的协同演奏。
通过通过精确的时间和节奏控制,它们能够模拟出乐队的音乐表演效果,曲调流畅,旋律动人。
这种人工智能机器人的音乐表演,为观众带来了前所未有的震撼和享受。
三、机器人与观众的互动体验人工智能机器人在舞台表演中,不仅仅是单纯的展示,还注重与观众的互动体验。
通过视觉和声音传感器,机器人能够实时感知观众的存在并作出相应的反应。
它们能够通过表情、姿势和声音等方式,与观众进行情感上的交流和互动。
在互动体验方面,机器人能够实现观众的即时指令,并作出相应的反应。
比如,观众可以通过手势或声音向机器人发送指令,要求其进行特定的舞蹈动作或演奏乐曲。
机器人能够在毫秒级的时间内进行反应,并实现观众的要求。
AELOS仿人形舞蹈机器人

AELOS仿人形舞蹈机器人发布时间:2022-11-08T00:50:26.637Z 来源:《科技新时代》2022年6月第12期作者:师龙磊1,丁雪梅2,孙超3,成荣荣4 [导读] 随着技术的不断发展,机器人在我们生产与生活中越来越普遍,各行各业中都能看到机器人的身影师龙磊1,丁雪梅2,孙超3,成荣荣4(1.吉林建筑科技学院电气信息工程学院,吉林省长春市 130000;2.吉林建筑科技学院电气信息工程学院,吉林省长春市 130000;3.吉林建筑科技学院电气信息工程学院,吉林省长春市 130000)摘要:随着技术的不断发展,机器人在我们生产与生活中越来越普遍,各行各业中都能看到机器人的身影。
本论文主要研究关于跳舞机器人的开发设计与调试,并介绍了机器人的传感器、电池、舵机等硬件设备。
还通过实验来证实了机器人的自由度以及动作范围。
机器人跳舞主要是通过自主设计舞蹈动作并通过Blockly语言编程使动作与音乐可以结合起来。
跳舞机器人也将走进人们生活中,给需要的人们带来观赏上的娱乐和心灵上的慰籍。
关键词:Blockly语言;传感器;跳舞机器人AELOS Humanoid Dancing RobotLonglei Shi1,Xuemei Ding2 ,Chao Sun 3,Rongrong Cheng 3(1.Jilin Institute of Construction Science and Technology School of Electrical Information Engineering, Changchun , Jilin , 130000; 2. Jilin Institute of Construction Science and Technology,Institute of Electrical Information Engineering, Changchun , Jilin , 130000;3. Jilin Institute of Construction Science and Technology School of Electrical Information Engineering, Changchun , Jilin , 130000) Abstract: With the continuous development of technology, robots are becoming more and more common in our production and life, and robots can be seen in all walks of life. The paper is mainly about the development and design of dancing robots and debugging. The robot's sensors, batteries, rudders and other hardware equipment are introduced. The degree of freedom and range of movement of the robot are also confirmed by experiment. The main means of robot dancing is to combine action with music by designing dance movement independently and programming them in Blockly language. Dancing robots will also come into people's live, and bring entertainment and spiritual comfort to those in need. Keywords: Blockly language; sensor; dancing robot0 引言/综述目前市场上见到最多的是智能型机器人,能根据传感器搜集到的信息进行复杂的逻辑运算,并能根据计算结果自主做出判断与决策,进行自主活动。
舞蹈机器人控制系统设计
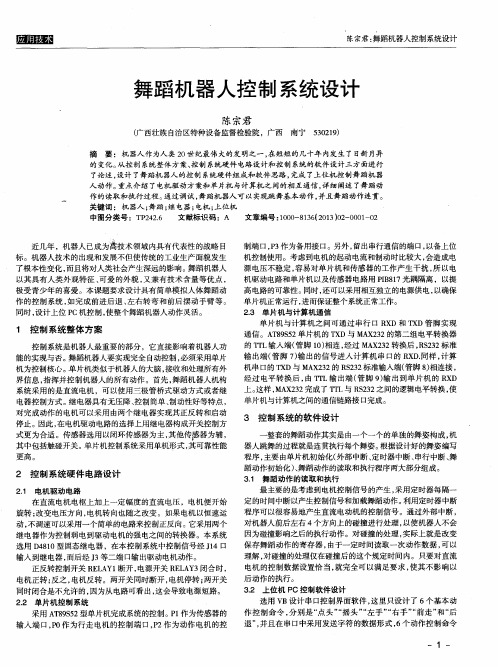
2 控 制 系统硬 件 电路 设计
2 . 1 电机 驱 动 电路
最主要的是 考虑 到电机控制信号 的产生 , 采用定时器每 隔一 定的时间中断以产生控制信号和加载舞蹈动作。 利用定 时器 中断 程序可 以很容易地产 生直 流电动机 的控 制信 号。通过外部 中断 , 对机器人前后左 右 4个方 向上 的碰撞进行处理 , 以使机器人不会 因为碰撞影 响之后 的执行动作 。对碰撞 的处 理 , 实际上就是改变 保存舞蹈动 作的寄存器 , 由于一定 时间读 取一次动作 数据 , 可 以 理解 , 对碰撞 的处理仅在碰撞后 的这个规定时 间内。只要对直流
陈宗君 : 舞蹈机器人控制系统设计
舞蹈机器 人控 制 系统设计
陈 宗君
( 广西壮族 自 治 区特种设备监督检验院 ,广西
摘
南宁 5 3 0 2 1 9 )
要 :机 器人作 为人 类 2 o 世 纪最伟 大的发 明之一 , 在短 短的几十年 内发 生了 日新月异
的 变化 。 从 控 制 系统 整 体 方 案 、 控 制 系统 硬 件 电路 设 计 和控 制 系统 的软 件 设 计 三 方 面进 行 了论 述 , 设 计 了舞 蹈机 器人 的控 制 系统硬 件 组 成 和 软 件 思 路 , 完 成 了上位 机控 制 舞 蹈 机 器
1 控 制 系统整 体 方案
控制系统是机器人最 重要 的部分 ,它直接影 响着机器 人功 能的实 现与否。舞蹈机器人要实现完 全 自动控制 , 必须采用单片 机 为控 制核心。单片机类似于机器人 的大脑 , 接收和处理所有外
通 信。A T 8 9 S 5 2单 片机 的 T XD与 MA X 2 3 2的第二组 电平 转换器 的1 T r L输入端 ( 管脚 1 0 ) 相连 , 经过 MA X 2 3 2转换后 , R S 2 3 2标准 输 出端 ( 管脚 7 ) 输 出的信号进入 计算机 串 口的 R X D . 同样 , 计 算 机 串 口的 T X D与 MA X 2 3 2的 R S 2 3 2 标准输入端 ( 管脚 8 ) 相连接 , 经过 电平转换 后 , 由T r L输 出端 ( 管脚 9 ) 输 出到 单片机 的 R X D 上。 这样 , MA X 2 3 2 完成 了 T T L与 R S 2 3 2之间的逻辑电平转换 , 使 单片机与计算机 之间的通信链路接 口完成。
跳舞的机器人制作原理

跳舞的机器人制作原理跳舞机器人的制作原理是基于先进的机械工程、电子技术和人工智能技术的综合应用。
以下是跳舞机器人的制作原理的详细介绍:1. 机械结构设计:跳舞机器人的外部形状需要经过设计师的构思和绘图,确定机器人的尺寸、比例和外形。
同时,机器人的身体需要具备柔软的关节和灵活的活动范围,以模拟人类的舞蹈动作。
2. 运动控制系统:在机械结构内部,安装有伺服电机、驱动器、传感器和控制电路等组件。
伺服电机用于驱动机械臂、腿部和其他关节,控制机器人的运动。
驱动器将来自控制电路的指令转化为相应的电信号,控制伺服电机的转动。
传感器用于检测机器人的位置、角度和力度,将这些信息反馈给控制系统,以实现对机器人的精确控制。
3. 动作规划和控制算法:机器人的动作是通过预先编程的动作规划和控制算法实现的。
动作规划是将舞蹈动作转化为机器人可执行的指令序列,包括身体各部位的位置和姿态。
控制算法负责根据规划好的动作指令,实时计算出每个关节的控制量,以确保机器人可以按照预定的舞蹈动作进行运动。
4. 人工智能技术:为了让机器人更精确地模仿舞蹈动作,人工智能技术可以被用来让机器人通过学习不同的舞蹈视频或者传感器数据来自主学习舞蹈动作。
通过深度学习和模式识别算法,机器人可以学习并识别不同的舞蹈动作,并将学到的知识应用于实践中。
5. 硬件和软件集成:机器人的硬件和软件需要进行集成,确保它们能够正常协同工作。
本质上,机器人是由机械、电子和计算机以及相应的编程语言组成的综合系统。
通过将硬件和软件的功能进行协调和整合,机器人能够正确地执行动作规划和控制算法,并与人类进行交互。
跳舞机器人的制作原理包括机械结构设计、运动控制系统、动作规划和控制算法、人工智能技术以及硬件和软件的集成。
这些技术和原理的综合应用,使得机器人能够模拟人类舞蹈动作并实现动作的精确控制。
小型舞蹈双足机器人的设计及实现

小型舞蹈双足机器人的设计及实现
导言
随着科技的不断发展,机器人已经成为我们生活中不可或缺的一部分。
在舞蹈领域,
机器人也开始发挥重要的作用,可以通过编程和控制实现各种舞蹈动作。
本文将设计和实
现一个小型舞蹈双足机器人,通过结合机械结构设计、电子控制系统和编程算法,实现机
器人的舞蹈动作。
一、机器人的设计
1. 机械结构设计
机器人的机械结构设计是实现舞蹈动作的基础。
我们设计一种双足机器人,可以在平
稳的地面上进行舞蹈动作。
机器人的双足结构采用轻量、坚固的材料制作,同时保证机器
人的平衡性和稳定性。
双足机器人的关节部分采用柔性材料设计,可以实现多种舞蹈动作。
双足机器人的步态设计要符合舞蹈的节奏和韵律,能够实现舞蹈动作的美感和流畅度。
2. 电子控制系统设计
机器人的电子控制系统是实现舞蹈动作的关键。
我们设计一种基于脉冲宽度调制(PWM)的双足机器人控制系统,可以实现机器人的步态控制和舞蹈动作的编程控制。
控制系统采
用微处理器作为核心控制单元,可以实现舞蹈动作的实时控制和优化调整。
控制系统还需
要包括传感器模块,能够实时监测机器人的姿态和环境信息,保证机器人的稳定性和安全性。
3. 编程算法设计
机器人的舞蹈动作是通过编程算法进行控制和实现的。
我们设计一种基于动作规划和
运动控制的编程算法,可以实现机器人舞蹈动作的优化和实时调整。
编程算法需要考虑机
器人的动力学特性和机械结构特点,能够有效控制机器人的步态和姿态,实现各种舞蹈动作。
乐高ev3跳舞机器人搭建图纸

乐高ev3跳舞机器人搭建图纸三、程序编写(20分钟):任务要求,当按下触碰传感器的时候机器人开始跳舞;有人走到机器人面前时,机器人会说:〃你好!”。
逻辑思路1、当检测前方有人的时候,机器人会说你好,显示〃你好啊按触碰开关开始〃,按下触碰开关,并显示一种表情;2、按下触碰开关,一秒后开始跳舞,显示动画眼睛:若检测到红色,白色,蓝色,绿色,黄色,黑色,棕色,不同的颜色,机器人会放不同的音乐,说不同的话。
程序编写指导学员根据思路自主编写调试程序,各种舞步可由学员自行设计。
可以增加很多种舞蹈动作,表情,声音。
、比赛游戏(20分钟):准备红色,白色,蓝色,绿色,黄色,黑色,棕色多种颜色模块搭建的指示牌,供机器人检测。
1、自己给自己的作品一个名字;2、每人1到2分钟的舞蹈表演时间;3、表演完成后,由所有学员投票,获得票数最多的获得〃迪瓦舞蹈家〃称号。
五、总结(10分钟)1、请各位学员介绍自己的作品(叫什么名字、有什么功能等),同时做出点评(很有创意、很像、很漂亮等鼓励性词句);2、同学们想不想给机器人设计一段个性的音乐和表情呢,下节课我们将给机器人设计属于自己的配乐和表情,说中文,显示中文;3、整理器材,分类放好零件。
课程时间基本为120分钟开头结尾老师根据自己班级情况再加入英文的内容,以及活动,适当发挥。
注意事项1、在动机引导的过程中,如果孩子回答不出,可以加以提示或者以图画书中的情节作引导2、讨论时,不要偏离主题3、在操作时,如有孩子不想参与,就不必勉强他。
但一定要观察其行为表现,一旦孩子开始操作就可以鼓励他参与进来(展开活动中,需要注意的问题,包括搭建、课堂纪律等等)参考资料(引起动机里面引用的实际案例)跳舞的机器人一/公。
基于语音控制的舞蹈机器人的设计与制作
m o n o o sa d AT8 5 sc n r l r e sng u tt on r lt e d n i g m o e e t.The v c e o ii n t c no og a a e t oie c to vi g m t r n 9S a e ta oc si ni o c to h a c n v m n s 1 p oi e r c g to e h l y c n m k he v c on r l n
赫救 _ ~ ●十 J 一 ●
设 计 开 发
~
术一
姆
基于语音控制的舞蹈机器人的设计与制作
李 从健 陈 晓 峰 郑 宏 字 赵 亚 国
( 大 学 宁夏银 川 702) 宁夏 501
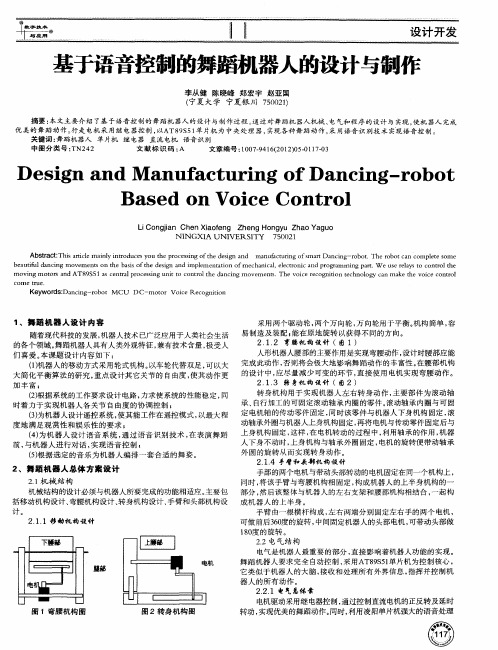
摘要 : 文 主要 介 绍 了基 于语 音 控制 的舞 蹈机 器 人 的设 计 与制 作过 程 。 本 通过 对 舞蹈 机 器人机 械 、 电气和 程序 的设 计与 实现 , 机 器人 完 成 使 优 美 的舞 蹈 动 作 。 走 电机 采 用 继 电 器控 制 , 行  ̄AT8 S 1 片机 为 中央 处理 器 , 95单 实现 各种 舞 蹈 动作 , 用 语音 识 别技 术 实现 语 音控 制 。 采 关键 词 : 蹈机 器人 单 片机 继 电器 直流 电机 语音 识别 舞
采 用 两 个驱 动 轮 , 个 万 向轮 , 向 轮 用 于平 衡 。 构 简 单 , 两 万 机 容 易制造及装配 ; 在原地旋 转以获得不 同的方向。 能 2. . 弯 腰 机 构 设 计 (图 1) 12
人形机器人腰部的主要作用是实现 弯腰动作 , 设计时腰部应能 完成此动作 , 否则将会极大地影 响舞蹈动 作的丰富性 。 在腰部机构 的设 计 中, 应尽量 减少可变 的环 节 , 直接使 用 电机实现弯腰动作 。
人形舞蹈机器人的结构设计及实现

人形舞蹈机器人的结构设计及实现作者:来盼盼来源:《数码设计》2020年第06期摘要:现阶段,机器人的应用领域不断拓宽,研究具有人类智能、灵活性,并能够与人交流,不断适应周围环境的机器人一直是人类的梦想之一。
人形舞蹈机器人作为人形机器人的一种,能够随着音乐和舞蹈翩翩起舞,所展现的观赏性和科学性将给人们带来极大的视觉冲击和科技享受,在教育娱乐服务等方面前景光明。
本文从舞蹈机器人的概述展开,重点讨论了其机械结构设计和舞蹈动作的调试。
关键词:人形机器人;结构设计;舵机选型;舞蹈动作中图分类号:TP242文献标识码:A文章编号:1672-9129(2020)06-0075-02Abstract:Atthepresentstage,theapplicationoftherobothasbeenexpanding,researchwithhumanintelligence,flexibility,andcancommunicatewithpeople,constantlyadapttotheenvironmentoftherobothasbeenoneofthedreamsofhumanbeings.Asakindofhumano idrobot,humanoiddancerobotcandancealongwithmusicanddance.Itsornamentalandscientificfeatureswillbringgr eatvisualimpactandtechnologicalenjoymenttopeople,andithasabrightfutureineducationandentertainmentservices.Inthispaper,thedesignofthemechanicalstructureandthedebuggingofthedancemovementofthedancerobotarediscussed.Keywords:humanoidrobot;Structuraldesign;Steeringgearselection;Dancemoves1引言近年来,仿生科技发展迅猛,仿生科技在机器人技术发展领域的表现格外引人注目,其中人形机器人的研究和发展尤其受到各国研究人员青睐,成为智能机器人领域中最活跃的研究热点之一。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
左电机
右电机
运动状态
P2.3 P2.2 P2.1 P2.0
1 0 01
前进
0 1 10
后退
00 0 1
左转
10 00
右转
00 1 0
0 10 0
01 0 1 1 01 0
1.2M
左退 右退 左急转 右急转
左转、右转各两圈
左转 前进3S
左转
前进3S
舞台
前 进
3S
出
前进7S
左转
前 进 5S
左急右急各5圈
J6
+ -
7 .2 V
C4 2 20 u F
舞蹈机器人实际电路及制作
IC 1
LM7 80 5
1
Vin
+5V
3
Hale Waihona Puke C7C5C61 04
2 20 u F 1 04
6针排座 GND
2 L293D
I C3
J1 1 2 3 4 5 6
C3
1 0u F
S1
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20
JMP $
程序的编译与下载
按下面步骤下载程序到单片机:软件编译得到-HEX单片机代码-------调入烧写专用软件-------用下载线连接单片机和电脑------将HEX代码写入单片机
程序下载到单片机
用下载软件把HEX 代码写入单片机
程序烧写完成,可以运行 你的机器人了!
包装你的舞蹈机器人
单片机控制原理及编程介绍
CLR P2.3 CLR P2.2 CLR P2.1 SETB P2.0
单片机控制原理及编程介绍
SETB P2.3 CLR P2.2 CLR P2.1 CLR P2.0
完整的单片制电机作路小备制系料作统电路及制作
电路原理图
用万能电路板焊 装的电路板
安装了电电源源电电路路的单片机小系统
P3. 3 /INT1 P2. 7
P3. 4 /T0
P2. 6
P3. 5 /T1
P2. 5
P3. 6 /WD- P2. 4
P3. 7 /RD- P2. 3
XTAL2
P2. 2
XTAL1
P2. 1
VSS
P2. 0
40 39 38 37 36 35 34 33 32 31 30 29 28 27 26 25 24 23 22 21
强烈建议用废物利用的 方法设计制作底盘、激发 灵感、启发思路!!!
底盘结构形式、尺寸设计
1、利用光盘设计的底盘结构尺寸图
用光盘制作舞蹈机器人
用塑料快餐盒制作
设计的结构图
制作
备料
准备安装电动机
用玻璃球制作导向轮
上端剪开便于与底盘安装
有机玻璃底盘上钻三个孔,便于 固定导向轮
导向轮安装完成
P1. 0
VCC
P1. 1
P0. 0
P1. 2
P0. 1
P1. 3 P1. 4
IC 2
P0. 2 P0. 3
P1. 5 P1. 6
8 9S5 1
P0. 4 P0. 5
P1. 7
P0. 6
RST
P0. 7
P3. 0 /RXDVPP/EA-
P3. 1 /TXD ALE/PR
P3. 2 /INT0 PSEN-
J3
1 2 3 4 5 6
IC17 4HC3 7 3
制作方法
机械部分的设计与制作
底盘的设计制作 外观的设计与制作
底盘???
固定电动机,安装车轮、电路板的平台
底盘的设计与制作
1、总体结构 2、电动机选型 3、底盘材料 4、底盘尺寸
总体结构设计
外型:
明确我们现在设计制作的方向:
运动方式:
轮式,简单的走舞的?蹈机器人
8
22
9
23 24 25
10 11
12
J2
2 5针
13
OE 0Q 0D 1D 1Q 2Q 2D 3D 3Q GND
1 20 2 19 3 18 4 17 5 16 6 15 7 14 8 13 9 12 10 11
VCC 7Q 7D 6D 6Q 5Q 5D 4D 4Q LE
R5 1 00 R6 1 00
ACALL YS4S
ACALL YS1S
CLR P2.3 ;左轮停,左转 ACALL YS0.5S ;左转90度
ACALL YS1S
CLR P2.0 ACALL YS0.5S ;右转90度
SETB P2.3 ;恢复前进
SETB P2.0 ;恢复前进 ACALL YS1S
0.8AMCALL YS1S
ACALL YS1S
控制电路----机器人的大脑
主要由 单片机为核 心元件组成 的智能控制 系统,为机 器人的运动 发号施令, 左右着机器 人的运行状 态。
驱动电路-----机器人动力来源
它和电动 机一道,组成 了机器人的运 动机构,由此 完成从行走到 肢体动作等各 种运动
电源电路------机器人的能源保证
由稳压电路和供 电的电池组成, 供电电池一般采 用可充电的镍氢 电池或锂电池, 由此需配用相应 的充电装置。学 生制作使用二手 锂电池比较经济 实惠
机器人外观设计 主题鲜明、生动新颖、功能完整、使用方便
动手做吧,你一定 会做得更好,
祝你成功!
如何设计? 芯片设计法
主要芯片电路及工作原理
AT89S51单片机
驱动电路 专用芯片
单片机控制原理及编程介绍
指编令程解指释令: SSEETBTB---指P2定.3端
口为高电平 CLR P2.2 C口LCRL为-R-低-指P电2定.平1端 SETB P2.0
单片机控制原理及编程介绍
CLR P2.3 SETB P2.2 SETB P2.1 CLR P2.0
❖ 目的:消除机器人制作的神秘感,了解机器
人制作的基本方法、过程、软硬件条件,促进 大家对电子技术的学习热情和兴趣,帮助大家 学以致用,有所收获。
❖ 主要内容:
❖ 机器人
❖ 结构 ❖ 原理 ❖ 设计 ❖ 制作
机器人
❖ 简单定义:由单片机控制的可运动的机器 ❖ “人”------自动、智能的含义 ❖ 舞蹈机器人: ❖ 由单片机程序控制,能顺序完成一定舞蹈动作
机械部分-------机器人运动的保证
由底盘、 电动机、 齿轮机构、 传动机构 等组成
舞蹈机器人是怎样动起来的?
❖ 设计人员把运动指令写进单片机,单片机按指令让其 输出端口不断改变输出高低电平状态,通过驱动电 路使电动机旋转工作,驱动安装在机器人上的各种运 动装置,让它们按照各种设计的方案运行工作,实现 完整的舞蹈运动效果。如-----
ACALL YS4S
ACALL YS1S
CLR P2.3 ACALL YS0.5S ;左转90度
CLR P2.3
SETB P2.3 ;恢复前进
CLR P2.0
YS05S: MOV R1,#100 ;0.5S子程 序 S1: MOV R2,#100 S2: MOV R3,#25 DJNZ R3,$ DJNZ R2,S2 DJNZ R1,S1 RET YS1S: ACALL YS05S;1S子程序 ACALL YS05S RET YS4S: MOV R4,#4 ;4S子程序 S3: ACALL YS1S DJNZ R4,S3 RET END
❖ 前进运动:
单片机
❖ 旋转运动:
驱动电路
电动机
❖ 摇摆运动: ❖ 其他运动等
AT89S51
1
0
L293
舞蹈机器人设计
简单的舞蹈机器人 ❖ 电路设计 ❖ 程序设计 ❖ 外观设计 ❖ 备料 ❖ 制作 ❖ 调试
电路设计
设计目标:能使机器人按设定程序完成各种动作
必备的基础电路:
1、单片机最小系统 2、电动机驱动电路 3、电源电路
R1 3 0P 1 0K
C1
1 2M 3 0P C2
1 2 3 4 5 6 7 8
动力
VDD
OUT 2 IN2
GND
OUT 1 GND
IN1
E N1
IN3 E N2
GND
OUT 3
OUT 4 GND
IN4
VCC
16 电路
15
14
13
12
11
10
9
C14
C16
2 23 + 1
1 04
2
C1 5 左电机
功能:
电动机选型(模型直流电动机)
电动机的类型 电动机的结构 电动机的功率
1、类型: 高速电机、减速电机、 步进电机、舵机
舞蹈机器人可以选用后 三种电机
2、结构: 电动机的结构决定电动机与 底盘的安装方式和尺寸结构
3、功率:
由机器人的工作性质来定, 舞蹈机器人对电动机的功率
要求不是很大
底盘材料
最常用的是有机玻璃,但有机玻璃成本较高。 寻找合适的废弃物制作机器人是一种不错的选择,如,废弃的 光盘、快餐盒、塑料饭盒、等
进 右转 前进4S
左转
前进1S
ORG 00H
ACALL YS1S ACALL YS1S
SETB P2.3 ;前进1S
ACALL YS1S
SETB P2.0
ACALL YS4S CLR P2.3
CLR P2.2
ACALL YS0.5S ;左转90度
CLR P2.1
SETB P2.3 ;恢复前进 ACALL YS1S
ACALL YS1S ;调延时1S程序 ACALL YS1S
CLR P2.0 ;右轮停,右转