舞蹈机器人设计方案[1]
舞蹈机器人设计方案
舞蹈机器人设计方案一、比赛场地:待定二、比赛时间:时间定为3到5分钟三、机器人技术要求:(1)构造:机器人采用17个舵机,可以做出人形机器人,两只手臂,各3个舵机,分别模仿人的肘关节,肩关节和胳膊横向的旋转。
两条腿各有5个舵机,分别模仿人的胯关节,膝关节(两个舵机)和脚踝关节。
头部有一个舵机,来控制机器人头部的转动。
(2)外形:身上的连接件可采用硬质铝合金或者铁片加工连接,建议采用硬质铝合金连接件,这样可以让机器人重量减轻一点。
外表在不影响动作的条件下,可以给它穿上衣服,服装搭配一定要恰当。
(3)要求:机器人的身高、体重要符合比赛要求,电源线路不能外露,能保证机器人在做动作时不会摔倒。
(4)背景音乐:有4个背景音乐,第一个是准备音乐,机器人能够按照需求站好,准备跳舞。
其他3个音乐为机器人的舞蹈音乐。
(5)其他:电池和控制芯片需要安放在合理的位置。
四、机器人舞蹈选择:我们可以做3个机器人,形成一个组合上场比赛。
机器人呈竖线排列,面向裁判。
首先准备音乐响起,第一个机器人不动,可做一些有趣动作,比如扭胯,伸展胳膊等,后面两个分别向两边分开,走到一定位置停下,走路可以模仿太空步,滑过去的,调整步伐,形成一个等边三角形,以第一个机器人为中心,这个过程差不多40秒。
切换音乐,第一个机器人开始跳舞,后面两个机器人伴舞,这个过程一分钟左右,动作停止,机器人复位为直立状态。
第三首音乐响起,然后第一个机器人与第二个机器人互换位置,继续跳舞,持续一分钟左右。
最后响起第四首音乐,第二个机器人和第三个机器人互换,开始跳舞,持续一分钟左右结束,向裁判敬礼。
五、造价:舵机必须选择金属齿轮的舵机,并且能旋转180°,有足够大的扭力,这样才能承受机器人的重量和运动,一般价格在80~500元之间。
这样一个机器人造价五千五百元左右。
绿色机器人舞蹈儿童教案

绿色机器人舞蹈儿童教案第一节,认识绿色机器人。
在这个时代,科技已经渗透到我们生活的方方面面。
绿色机器人是一种智能机器人,它可以进行各种动作和表情,非常逼真。
在这节课上,我们将带领孩子们认识绿色机器人,了解它的特点和功能。
首先,我们可以让孩子们观察绿色机器人的外观和动作。
它的身体是绿色的,有着可爱的表情和灵动的眼睛。
它可以做出各种动作,比如跳舞、摇头、摆手等等。
孩子们可以通过观察和互动,逐渐了解绿色机器人的特点和功能。
接下来,我们可以让孩子们亲自操作绿色机器人,让它做出各种动作。
这样可以让孩子们更加深入地了解绿色机器人的功能和使用方法。
他们可以尝试用遥控器或者语音指令来控制绿色机器人,让它做出不同的动作和表情。
通过这样的互动,孩子们可以更加深入地了解绿色机器人,并且增强他们的动手能力和创造力。
第二节,学习绿色机器人舞蹈。
在这节课上,我们将教孩子们学习绿色机器人舞蹈。
绿色机器人舞蹈是一种结合了现代舞和机器人动作的舞蹈形式,非常有趣和富有挑战性。
通过学习绿色机器人舞蹈,孩子们不仅可以锻炼身体,还可以提高动作协调能力和舞台表现力。
首先,我们可以给孩子们介绍绿色机器人舞蹈的基本动作和节奏。
他们可以观看老师的示范,然后跟随着音乐节奏进行练习。
通过不断的重复练习,孩子们可以逐渐掌握绿色机器人舞蹈的基本动作和节奏。
接着,我们可以让孩子们进行分组练习,进行舞蹈编排和排练。
每个小组可以根据自己的喜好和创意,设计出独特的舞蹈动作和表现形式。
通过这样的分组练习,孩子们不仅可以锻炼团队合作能力,还可以培养创造力和表现力。
最后,我们可以组织一次绿色机器人舞蹈表演,让孩子们展示他们的成果。
通过表演,孩子们可以展现自己的舞台魅力,增强自信心和表现力。
同时,家长和老师也可以通过观看表演,了解孩子们在舞蹈学习中的进步和成就。
第三节,创作绿色机器人舞蹈故事。
在这节课上,我们将教孩子们创作绿色机器人舞蹈故事。
绿色机器人舞蹈故事是一种结合了舞蹈和故事情节的创作形式,非常有趣和富有想象力。
舞蹈机器人控制系统设计
2 控 制 系统硬 件 电路 设计
2 . 1 电机 驱 动 电路
最主要的是 考虑 到电机控制信号 的产生 , 采用定时器每 隔一 定的时间中断以产生控制信号和加载舞蹈动作。 利用定 时器 中断 程序可 以很容易地产 生直 流电动机 的控 制信 号。通过外部 中断 , 对机器人前后左 右 4个方 向上 的碰撞进行处理 , 以使机器人不会 因为碰撞影 响之后 的执行动作 。对碰撞 的处 理 , 实际上就是改变 保存舞蹈动 作的寄存器 , 由于一定 时间读 取一次动作 数据 , 可 以 理解 , 对碰撞 的处理仅在碰撞后 的这个规定时 间内。只要对直流
陈宗君 : 舞蹈机器人控制系统设计
舞蹈机器 人控 制 系统设计
陈 宗君
( 广西壮族 自 治 区特种设备监督检验院 ,广西
摘
南宁 5 3 0 2 1 9 )
要 :机 器人作 为人 类 2 o 世 纪最伟 大的发 明之一 , 在短 短的几十年 内发 生了 日新月异
的 变化 。 从 控 制 系统 整 体 方 案 、 控 制 系统 硬 件 电路 设 计 和控 制 系统 的软 件 设 计 三 方 面进 行 了论 述 , 设 计 了舞 蹈机 器人 的控 制 系统硬 件 组 成 和 软 件 思 路 , 完 成 了上位 机控 制 舞 蹈 机 器
1 控 制 系统整 体 方案
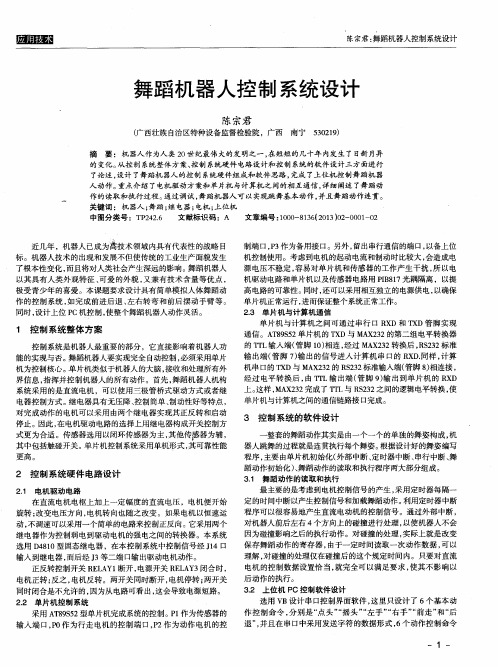
控制系统是机器人最 重要 的部分 ,它直接影 响着机器 人功 能的实 现与否。舞蹈机器人要实现完 全 自动控制 , 必须采用单片 机 为控 制核心。单片机类似于机器人 的大脑 , 接收和处理所有外
通 信。A T 8 9 S 5 2单 片机 的 T XD与 MA X 2 3 2的第二组 电平 转换器 的1 T r L输入端 ( 管脚 1 0 ) 相连 , 经过 MA X 2 3 2转换后 , R S 2 3 2标准 输 出端 ( 管脚 7 ) 输 出的信号进入 计算机 串 口的 R X D . 同样 , 计 算 机 串 口的 T X D与 MA X 2 3 2的 R S 2 3 2 标准输入端 ( 管脚 8 ) 相连接 , 经过 电平转换 后 , 由T r L输 出端 ( 管脚 9 ) 输 出到 单片机 的 R X D 上。 这样 , MA X 2 3 2 完成 了 T T L与 R S 2 3 2之间的逻辑电平转换 , 使 单片机与计算机 之间的通信链路接 口完成。
舞蹈机器人创意设计及实现研究
舞蹈机器人创意设计及实现研究摘要:舞蹈机器人是一种娱乐类机器人。
本文针对其设计结构, 以及操控性能的要求,以52系列单片机为处理器,设计和实现了基于舵机达到控制机器人舞蹈动作的效果。
关键词:舞蹈机器人;52单片机;舵机1设计机器人技术的难点和关键点通过对参加2007年Robocup的比赛,发现设计机器人的难点和关键技术主要在以下方而:1)控制软件。
目前,市场上仅有同时支持16个舵机运转的软件,也就是这款软件的控制通道只有16个,不足以满足这款有两个直流电机与26个舵机的机器人实际需求。
由于51 单片机的端口有限,所以只能把16通道升级为24通道,创造性的用一根线连接两个舵机,即往两个极位角相差180的舵机上传送同一个信号,最终实现了机器人变形后翅膀和机翼的动作;2)对机器人直流电机的控制。
要单独设计电路板,以确保动作的准确性,避免线路之间信号造成的互相干扰;3)机械设计方面。
机器人在设计尺寸上有严格的规定,其自身的构造必须要科学设计,要合理分布其自身的重量,以便于达到机器人重心尽可能得到合理调整的目的,同时还要二次加工个别位置的舵机⑴。
2具体实现过程1)机械设计。
以前研发比较成熟的机器人为基础,添加一些类人型舞蹈动作模块,如手指、腕部、腿部、头部等部位的模块。
机器人通常使用3种电机,也就是步进电机、直流电机和舵机这三种。
通过对这三种电机进行综合对比,舵机最终被决定用在机器人的各个关节部位,但机器人变形后的轮子,则是用直流电机来驱动。
这样机器人电机的安装可以结合自身的结构特点省去麻烦,还能使电池的负载大大减轻。
机器人采用SolidWorks2006来构建三维建模平台,在整体建模结束后,所进行的工作模拟仿真一般是通过Solidworks的COOS/Motio模块来实现。
当前而临的难题是选择机器人本身材料。
大家都很难完美解决机器人自身重量和结构强度的矛盾,综合考虑多方而原因,决定采用铝合金构件来作为机器人的整体结构,把电木板材构件应用于摩擦较剧烈的部位。
舞蹈机器人设计概述
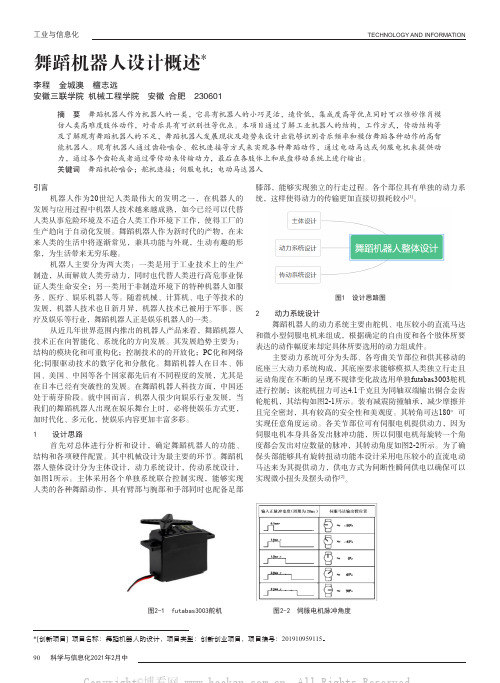
图1 设计思路图
动力系统设计
舞蹈机器人的动力系统主要由舵机、电压较小的直流马达
和微小型伺服电机来组成,根据确定的自由度和各个肢体所要
表达的动作幅度来却定具体所要选用的动力组成件。
主要动力系统可分为头部、各弯曲关节部位和供其移动的
底座三大动力系统构成,其底座要求能够模拟人类独立行走且futabas3003舵机 图2-2 伺服电机脉冲角度
图3-1 动力控制图 图3-2 电机传动系统
肢体表达设计
舞蹈机器人整体的肢体表达应具有足够的灵活性,本舞蹈机器人具有头部、肩部、肘部、腕部、腰部、膝部、脚部等多个可活动关节来模仿人类的舞蹈动作,各关节控制如图4所示。
头部用直流马达控制具有一个自由度一用来完成头部的左右转动;上身躯干一共具有六个自由度,全部由各个部位的伺服电机来驱动,分别为左右肩部两个自由度,用来完成肩部手臂的
图4 各关节控制图5 总结
舞蹈机器人的动力系统采用直流马达、伺服电机和舵机分区分机构独立传动;传动系统采用直接传动、齿轮传动、带轮传动等多种传动方式相结合;肢体表达设计采用
过三维软件进行建模能够更好地将舞蹈机器人的外观具体化。
6 。
毕业设计-基于单片机的舞蹈机器人控制系统设计
河南科技学院2014届本科毕业论文(设计)基于单片机的舞蹈机器人控制系统设计学生姓名:所在院系:机电学院所学专业:电气工程及其自动化导师姓名:完成时间:2014年5月24 日基于单片机的舞蹈机器人控制系统设计摘要机器人是典型的机电一体化装臵,它综合运用了机械与精密机械、微电子与计算机、自动控制与驱动、传感器与信息处理以及人工智能等多学科的最新研究成果,随着经济的发展和各行各业对自动化程度要求的提高,机器人技术得到了迅速发展,出现了各种各样的机器人产品,本文介绍的就是其中的舞蹈机器人。
舞蹈机器人的设计,首先通过对人类动作的深入了解,分析人类的动作特性,确定机器人的基本构成并选择合适的机械构造,本设计舞蹈机器人采用钢材结构,用舵机充当机器人关节,可实现类人结构。
并且与控制对象跳舞机器人的工作原理、动作过程进行比较,从而选择出组装机器人的造型,文中并分析机器人动作的局限性与优势。
同时本毕业设计介绍了基于AT89C51单片机的舞蹈机器人控制系统的设计,包括硬件部分和软件部分。
硬件部分介绍了舞蹈机器人控制系统的各模块,包括电源模块、单片机及外围接口电路模块、存储模块、串行通信模块、电机驱动控制模块及防碰撞模块六大部分;软件部分包括设定机器人的舞蹈动作程序。
详细阐述了系统的硬件实现方案和软件设计思想。
根据要求舞蹈机器人控制系统采用分时复用的方法,利用PWM信号对驱动电机进行控制,用以完成作品设计。
关键词:单片机,PWM信号,舞蹈机器人,舵机,直流电机MICROCONTROLLER-BASED ROBOT CONTROLSYSTEM DESIGN DANCEAbstractRobot is a typical mechatronic device, which combines the use of the latest research machinery and precision machinery, microelectronics and computer, automatic control and drive, sensors and information processing, and artificial intelligence, multi-disciplinary, with the economic development and the lines each industry to raise the required degree of automation, robotics technology has been developing rapidly, there has been a wide range of robotic products described in this article is one of the dancing robot.Design dancing robot, first through in-depth understanding of human action, human operating characteristics analysis to determine the basic structure of the robot and select the appropriate mechanical construction, the design of steel structures using robot dance, act as a robot with a steering joint, enabling the class human structure.And dancing robot control object works, the course of action are compared to select the shape of the assembly robot, the paper analyzed the limitations and advantages of robot action.Meanwhile, the graduation project presentation based on AT89C51 dance robot control system design, including hardware and software components.Hardware section describes the various modules dancing robot control system, including the power supply module, microcontroller and peripheral interface circuit module, memory module, serial communication module, motor drive control module and anti-collision module six parts; Software includes setting the robot dance program.Elaborated hardware implementations and software design. Dancing robot control system according to the requirements using time division multiplexing method using PWM control signal to the drive motor, designed to complete the work.Keywords: microcontroller, PWM signal, dancing robot, steering, DC目录1 绪论 (1)2方案论证取优及控制系统设计 (1)2.1 设计功能要求 (1)2.2方案论证取优 (2)2.3 自由度的分配 (2)2.4 电机的选择 (4)2.5 舞蹈机器人的机械部件 (5)2.6 系统设计方案分析 (5)3 系统硬件选型 (6)3.1 单片机可编程控制器部分 (6)3.1.1 单片机概述 (6)3.1.2 单片机选型 (6)3.2 电源模块 (7)3.3 串行通信模块 (7)3.4 存储模块 (8)3.5 电机驱动控制模块 (8)3.5.1 舵机的驱动控制模块 (8)3.6 防碰撞模块 (12)4 控制系统软件设计 (12)4.1 主程序 (13)4.2 定时器中断服务子程序 (13)4.3 串行中断服务子程序 (14)4.4 外部中断服务子程序 (14)5 结论 (15)参考文献 (16)附录 (16)致谢 (23)1 绪论40年前,比尔〃盖茨放弃学业,创立了微软,成为个人电脑普及革命的领军人物;10年前,他曾预言,机器人即将重复个人电脑崛起的道路。
大班音乐爱跳舞的机器人教案【含教学反思】

大班音乐爱跳舞的机器人教案【含教学反思】一、教学目标1. 知识目标通过本次教学,学生将能够:•了解机器人的基本概念;•掌握基本的机器人操作和编程逻辑;•学会使用Scratch软件对机器人进行简单的编程;•关注自己身体的节奏感和协调性,加强体育锻炼。
2. 能力目标通过本次教学,学生将能够:•培养观察和分析问题的能力;•培养动手实践和解决实际问题的能力;•培养个人和团体协作的意识和能力;•提高自信心和表达能力。
3. 情感目标通过本次教学,学生将能够:•培养良好的健康观念和生活习惯;•培养对音乐舞蹈的爱好和兴趣,增强审美情趣;•感受团队协作的快乐,提高合作能力;•培养勇于创新和尝试的精神。
二、教学重难点1. 教学重点•机器人的操作和编程逻辑;•音乐舞蹈的节奏感和协调性。
2. 教学难点•如何进行机器人操作和编程逻辑的讲解与实践;•如何将机器人与音乐舞蹈相结合,提高学生的参与度和创造性。
三、教学过程1. 教学准备教师需准备机器人教具、Scratch软件、音乐舞蹈资源,为学生展示机器人操作和编程示范。
2. 活动设计1.导入环节:让学生了解机器人的概念和基本操作,展示机器人的功能和特点。
同时,播放简短的音乐舞蹈视频,让学生感受音乐的节奏和舞蹈的美感。
2.学习环节:教师进行操作和编程逻辑的讲解与示范,让学生跟随教师完成基本的操作和编程练习。
3.拓展练习:教师设置小组活动,让学生通过编程和操控机器人创作自己的舞蹈,并在班级内进行展示和比较。
4.反思总结:教师引导学生反思本次活动,分享自己的体验和感受,并提出改进建议。
3. 教学反思在本次教学中,教师应从以下方面加强教学:1.机器人操作和编程逻辑的讲解可以更加通俗易懂,特别是对于一些学生来说机器人是一个较为陌生的领域,需要耐心指导。
2.音乐舞蹈资源的选择需要合理,以适应不同年龄段学生的喜好和学习需求。
3.小组活动需要设置合理的规则和目标,确保学生的参与度和创造性,避免某些学生被较为活跃的同学所牵制。
舞蹈机器人设计方案代码
_nop_() ;
}
}
}
/********************************************************/
/* 开关电机 */
/* 0--关电机 //关某位用 1 或,其他位为0 */
/* 1--正转 //开某位用 0 与,其他位为1 */
/* 2--反转 */
void scan0(unsigned int n0);
void scan1(unsigned int n1);
void scan2(unsigned int n2);
void scan3(unsigned int n3);
void scan4(unsigned int n4);
void scan5(unsigned int n5);
{switch(s1)
{case 0: {temp_1=temp; temp_1|=0x000c; temp=temp_1;} break ;//关电机
case 1: {temp_1=temp; temp_1&=0xfffb; temp=temp_1;} break ;//正转
case 2:{temp_1=temp; temp_1&=0xfff7; temp=temp_1;} break ;//反转
unsigned char P17_temp;
unsigned char P17_flag;
unsigned int num_0=0xffff;
unsigned int num_1=0xffff;
unsigned int num_2=0xffff;
unsigned int num_3=0xffff;
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
舞蹈机器人设计方案
一、比赛场地:待定
二、比赛时间:时间定为3到5分钟
三、机器人技术要求:
(1)构造:机器人采用17个舵机,可以做出人形机器人,两只手臂,各3个舵机,分别模仿人的肘关节,肩关节和胳膊横向的旋转。
两条腿各有5个舵机,分别模仿人的胯关节,膝关节(两个舵
机)和脚踝关节。
头部有一个舵机,来控制机器人头部的转动。
(2)外形:身上的连接件可采用硬质铝合金或者铁片加工连接,建议采用硬质铝合金连接件,这样可以让机器人重量减轻一点。
外表在不影响动作的条件下,可以给它穿上衣服,服装搭配一
定要恰当。
(3)要求:机器人的身高、体重要符合比赛要求,电源线路不能外露,能保证机器人在做动作时不会摔倒。
(4)背景音乐:有4个背景音乐,第一个是准备音乐,机器人能够按照需求站好,准备跳舞。
其他3个音乐为机器人的舞蹈音乐。
(5)其他:电池和控制芯片需要安放在合理的位置。
四、机器人舞蹈选择:
我们可以做3个机器人,形成一个组合上场比赛。
机器人呈竖线排列,面向裁判。
首先准备音乐响起,第一个机器人不动,可做一些有趣动作,比如扭胯,伸展胳膊等,后面两个分别向两边分开,走到一定位置停下,走路可以模仿太空步,滑过去的,调整步伐,形成一
个等边三角形,以第一个机器人为中心,这个过程差不多40秒。
切换音乐,第一个机器人开始跳舞,后面两个机器人伴舞,这个过程一分钟左右,动作停止,机器人复位为直立状态。
第三首音乐响起,然后第一个机器人与第二个机器人互换位置,继续跳舞,持续一分钟左右。
最后响起第四首音乐,第二个机器人和第三个机器人互换,开始跳舞,持续一分钟左右结束,向裁判敬礼。
五、造价:
舵机必须选择金属齿轮的舵机,并且能旋转180°,有足够大的扭力,这样才能承受机器人的重量和运动,一般价格在80~500元之间。
这样一个机器人造价五千五百元左右。