跳舞的机器人制作原理
娃娃会跳舞的科学实验原理

娃娃会跳舞的科学实验原理
娃娃会跳舞的科学实验原理是利用电磁感应原理。
实验中通常会使用一个简单的电路,包括一个铁芯线圈和一个电池。
当电流通过线圈时,会在铁芯中产生一个磁场。
当娃娃的底部放置在铁芯上方时,铁芯中的磁场会导致娃娃底部附近的铁质部件产生磁性。
当磁性部件接近铁芯时,由于磁力的吸引作用,娃娃会被吸附在铁芯上方。
当电路中断或改变时,磁场也会发生变化。
这种变化会导致娃娃与铁芯之间的磁力减弱或消失,使得娃娃失去支撑而跳起。
通过不断改变电路的状态,可以让娃娃在跳起和落下之间交替移动,形成跳舞的效果。
这个实验利用了电磁感应原理,即电流变化会产生磁场变化,磁场变化又会引起磁力的变化,从而实现娃娃的跳舞。
AELOS仿人形舞蹈机器人

AELOS仿人形舞蹈机器人发布时间:2022-11-08T00:50:26.637Z 来源:《科技新时代》2022年6月第12期作者:师龙磊1,丁雪梅2,孙超3,成荣荣4 [导读] 随着技术的不断发展,机器人在我们生产与生活中越来越普遍,各行各业中都能看到机器人的身影师龙磊1,丁雪梅2,孙超3,成荣荣4(1.吉林建筑科技学院电气信息工程学院,吉林省长春市 130000;2.吉林建筑科技学院电气信息工程学院,吉林省长春市 130000;3.吉林建筑科技学院电气信息工程学院,吉林省长春市 130000)摘要:随着技术的不断发展,机器人在我们生产与生活中越来越普遍,各行各业中都能看到机器人的身影。
本论文主要研究关于跳舞机器人的开发设计与调试,并介绍了机器人的传感器、电池、舵机等硬件设备。
还通过实验来证实了机器人的自由度以及动作范围。
机器人跳舞主要是通过自主设计舞蹈动作并通过Blockly语言编程使动作与音乐可以结合起来。
跳舞机器人也将走进人们生活中,给需要的人们带来观赏上的娱乐和心灵上的慰籍。
关键词:Blockly语言;传感器;跳舞机器人AELOS Humanoid Dancing RobotLonglei Shi1,Xuemei Ding2 ,Chao Sun 3,Rongrong Cheng 3(1.Jilin Institute of Construction Science and Technology School of Electrical Information Engineering, Changchun , Jilin , 130000; 2. Jilin Institute of Construction Science and Technology,Institute of Electrical Information Engineering, Changchun , Jilin , 130000;3. Jilin Institute of Construction Science and Technology School of Electrical Information Engineering, Changchun , Jilin , 130000) Abstract: With the continuous development of technology, robots are becoming more and more common in our production and life, and robots can be seen in all walks of life. The paper is mainly about the development and design of dancing robots and debugging. The robot's sensors, batteries, rudders and other hardware equipment are introduced. The degree of freedom and range of movement of the robot are also confirmed by experiment. The main means of robot dancing is to combine action with music by designing dance movement independently and programming them in Blockly language. Dancing robots will also come into people's live, and bring entertainment and spiritual comfort to those in need. Keywords: Blockly language; sensor; dancing robot0 引言/综述目前市场上见到最多的是智能型机器人,能根据传感器搜集到的信息进行复杂的逻辑运算,并能根据计算结果自主做出判断与决策,进行自主活动。
智能六足机器人舞蹈设计实验报告

智能六足机器人舞蹈设计实验报告【摘要】本文介绍了一款低成本的小型舞蹈六足机器人的设计。
根据仿生学原理确定六足机器人的比例尺寸,根据六足机器人的功能要求确定其自由度配置,选择了合适的材料和驱动元件,实现了一个小型的双足舞蹈六足机器人。
舞蹈六足机器人是娱乐六足机器人的一种,集软件和硬件于一身,核心是控制系统。
采用基于上下位机的控制结构,通过无线通信方式传输数据和指令。
在音乐特征识别的基础上结合专家系统、模糊控制等手段,通过舞蹈动作与音乐的自动匹配、同步演示等方法,实现舞蹈动作与音乐协调一致。
舞蹈六足机器人的设计一般要经过创意提案、整体论证、初步设计、组装调试、最终定型等几个大的步骤。
其中最重要的当数其中的机械设计环节,它关系到后面六足机器人的整体性能以及控制系统的设计。
【关键词】舞蹈六足机器人;AVR单片机;舵机1.引言六足机器人是作为现代高新技术的重要象征和发展结果,已经广泛应用于国民生产的哥哥领域,并正在给人类传统的生产模式带来革命性的变化,影响着人们生活的方方面面。
六足机器人一般由执行机构、驱动装置、检测装置和控制系统等组成。
现在,国际上对六足机器人的概念已经逐步趋近一般,即六足机器人是靠自身动力和控制能力来实现各种功能的一种机器。
联合国标准化组织采纳了美国六足机器人协会给六足机器人下的定义:“一种可编程和多功能的,用来搬运材料、零件、工具的操作机;或是为了执行不同的任务而具有可改变和可编程动作的专门系统。
”六足机器人产业在二十一世界将成为和汽车、电脑并驾齐驱的主干产业。
从庞大的工业六足机器人到微观的纳米六足机器人,从代表尖端技术的仿人型六足机器人到孩子们喜爱的宠物六足机器人,六足机器人正在日益走进我们的生活,成为人类最亲密的`伙伴。
六足机器人技术和产业化在全中国甚至全世界拥有一定得现实基础和广阔的市场前景。
本次设计采用Atmega16L单片机作为双足六足机器人控制单元的核心,具备自主决策和智能判断的能力。
跳舞机的运作原理
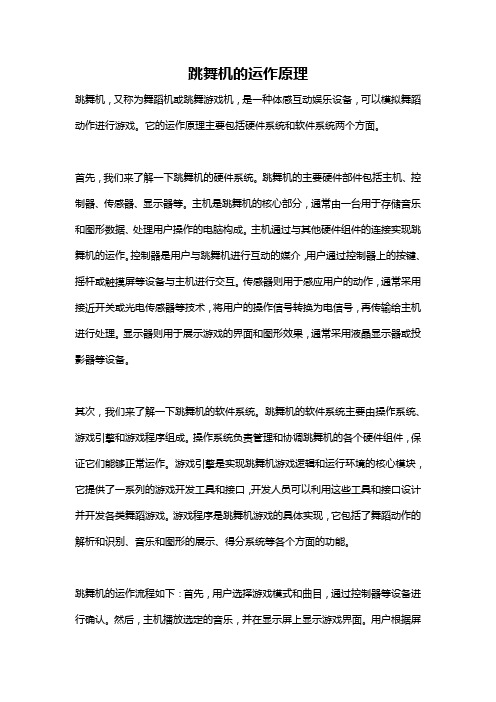
跳舞机的运作原理跳舞机,又称为舞蹈机或跳舞游戏机,是一种体感互动娱乐设备,可以模拟舞蹈动作进行游戏。
它的运作原理主要包括硬件系统和软件系统两个方面。
首先,我们来了解一下跳舞机的硬件系统。
跳舞机的主要硬件部件包括主机、控制器、传感器、显示器等。
主机是跳舞机的核心部分,通常由一台用于存储音乐和图形数据、处理用户操作的电脑构成。
主机通过与其他硬件组件的连接实现跳舞机的运作。
控制器是用户与跳舞机进行互动的媒介,用户通过控制器上的按键、摇杆或触摸屏等设备与主机进行交互。
传感器则用于感应用户的动作,通常采用接近开关或光电传感器等技术,将用户的操作信号转换为电信号,再传输给主机进行处理。
显示器则用于展示游戏的界面和图形效果,通常采用液晶显示器或投影器等设备。
其次,我们来了解一下跳舞机的软件系统。
跳舞机的软件系统主要由操作系统、游戏引擎和游戏程序组成。
操作系统负责管理和协调跳舞机的各个硬件组件,保证它们能够正常运作。
游戏引擎是实现跳舞机游戏逻辑和运行环境的核心模块,它提供了一系列的游戏开发工具和接口,开发人员可以利用这些工具和接口设计并开发各类舞蹈游戏。
游戏程序是跳舞机游戏的具体实现,它包括了舞蹈动作的解析和识别、音乐和图形的展示、得分系统等各个方面的功能。
跳舞机的运作流程如下:首先,用户选择游戏模式和曲目,通过控制器等设备进行确认。
然后,主机播放选定的音乐,并在显示屏上显示游戏界面。
用户根据屏幕上的指示和音乐的节奏进行相应的舞蹈动作。
用户的动作通过传感器感应,转换成电信号,并传输给主机进行处理。
主机根据用户的动作和节奏进行判定,判断用户的舞蹈动作是否准确,并通过分数等形式给予反馈。
游戏结束后,主机会根据用户的表现,给予相应的评价和奖励。
总的来说,跳舞机的运作原理主要包括硬件和软件两个方面。
在硬件方面,跳舞机通过主机、控制器、传感器和显示器等设备实现用户与游戏的互动。
在软件方面,跳舞机通过操作系统、游戏引擎和游戏程序实现游戏的逻辑和运行环境。
基于凌阳单片机的跳舞机器人设计
2009年6月第2期的关键是用好、用足地下水负压时段。
碾压强度过大,可能出现土基剪切破坏;碾压强度过低,达不到扰动效果。
碾压间隔小,成本高;碾压间隔过大,空气已填入负压区,继续碾压已无意义。
碾压间隔、压路机的适宜吨位、每次碾压的遍数和方法有待于摸索和进一步研究确定。
6结论与展望桥头跳车源于工后差异沉降,在施工阶段加强土基沉降,降低桥头路堤工后沉降,可减少桥头路堤在全寿命期内的维修养护次数及其他相应损失。
可改善桥头跳车的方法很多,能否推广应用取决于相应工艺的投资水平,探寻投资少、沉降效果显著的施工方法具有实际意义。
堆载预压和真空预压是公路建设中常用的手段,通常堆载预压要求超载预压或较长的预压期。
真空预压是人工制造真空度,通过真空作用在土体中产生有效应力,使软基产生压缩沉降。
本文的方法利用周期性自然产生的真空度增加施工期的沉降,不需要超载、预压期短、不需要人工制造真空度,所产生的效果显著,是可用的施工方法。
如果工期紧,可采用井点将水等方法人工降低特定位置地下水位,配合碾压加速路基沉降。
参考文献:[1]鲍明伟.桥头跳车防治技术研究报告[R].2002,2.[2]长春科技大学环境与建设学院.长余高速公路桥头跳车研究项目专题报告[R].1999.[3]公路软土地基路堤设计与施工技术规范[M].北京:人民交通出版社,1996.[4]洪毓康.土质学与土力学(第二版)[M].北京:人民交通出版社,1979.收稿日期:2009-03-21作者简介:赵洪利(1977.5-),男,山东泰安人,山东水利职业学院教师,主要从事道路桥梁教学与研究工作。
基于凌阳单片机的跳舞机器人设计鲁冠华刘星张水利(山东水利职业学院,山东日照276826)摘要:随着科技和经济的飞速发展,16位单片机已广泛应用在高档智能型玩具的设计和开发中。
本文结合实际,提出了一种基于凌阳16位单片机语音控制的跳舞机器人设计方案,以供探讨。
关键词:机器人;凌阳单片机;驱动模块;编码;语音识别和处理随着经济的高速发展和经济全球化的加快,机器人开始应用于高档智能型玩具的设计和开发中,跳舞机器人便是这个大家庭的重要一员。
想了解一下跳舞机器人的组成及其原理吗?

四、跳舞机器人的计算机
跳舞机器人的计算机可以控制与电路相连的所有部件。为了 使机器人动起来,计算机会打开所有需要的马达和阀门。大多 数机器人是可重新编程的。如果要改变机器人的行为,您只需 将一个新的程序写入它的计算机即可。
五、跳舞机器人的传感系统
跳舞机器人拥有的常见的一种感觉是运动感,也就是它监 控自身运动的能力。在标准设计中,机器人的关节处安装着 刻有凹槽的轮子。在轮子的一侧有一个发光二极管,它发出 一道光束,穿过凹槽,照在位于轮子另一侧的光传感器上。 当机器人移动某个特定的关节时,有凹槽的轮子会转动。在 此过程中,凹槽将挡住光束。光学传感器读取光束闪动的模 式,并将数据传送给计算机。计算机可以根据这一模式准确 地计算出关节已经旋转的距离。计算机鼠标中使用的基本系 统与此相同。今小编就来给大家介绍到这里,希望以上所说 会帮助到大家。大家如果还有什么不明白的,一八五五三七 一五三七九欢迎大家留言咨询。
想了解一下跳舞机器人的组成及其原理吗?
LOREM IPSUM DOLOR
目录
CONTENTS
一、引言 二、跳舞机器人的身体 三、跳舞机器人的传动装置 四、跳舞机器人的计算机 五、跳舞机器人的传感系统
一、引言
跳舞机器人是一种代表如今社会科技进步和发展的重要科技产 品。当大家看到这些机器人能够像人一样的做出各种动作,甚至炫 酷的舞技时,会不会感到匪夷所思呢?也会好奇他的组成结构和原 理吧!kt009下面小编就来给大家介绍一下吧。
二、跳舞机器人的பைடு நூலகம்体
跳舞机器人都有一个可以移动的身体。与人体骨骼类似,这 些独立的部件是用关节连接起来的。机器人的轮与轴是用某种传 动装置连接起来的。有些机器人使用马达和螺线管作为传动装置; 另一些则使用液压系统;还有一些使用气动系统(由压缩气体驱 动的系统)。
会跳舞的玩具的原理是

会跳舞的玩具的原理是会跳舞的玩具通常采用电子技术和机械结构来实现。
下面我将详细介绍其中一种常见的实现方式。
首先,会跳舞的玩具通常内置一个电池供电系统。
电池系统通常由一个或多个电池组成,可以提供所需的电能供给。
这些电池在玩具内部布置,以确保其正常运行。
其次,会跳舞的玩具配备了一个电子控制系统。
这个控制系统由一个或多个微控制器组成,用于接收和处理来自其他部件的信号。
微控制器的指令可以通过编程来控制玩具的行为。
例如,可以编程控制玩具跳舞的舞步、频率等参数。
此外,会跳舞的玩具还配备了一组马达或电机。
这些马达或电机被放置在合适的位置上,用于驱动玩具的舞蹈动作。
驱动舞步的方式有很多种,例如使用摆线电机、步进电机、直流电机等。
为了将电能转化为机械能,马达或电机通常通过齿轮或传动带与其他机械组件相连。
这些机械组件可以是各种形状和尺寸的部件,用于使玩具的身体、手臂、腿等部分实现舞蹈动作。
通过合理设计机械结构,可以使玩具的舞蹈动作更加流畅、灵活。
除了上述主要部件外,会跳舞的玩具往往还配备了其他辅助部件。
例如,传感器用于检测玩具的姿势和动作,以便实现更加精确的舞蹈动作。
音频系统用于播放音乐或舞曲,以增强舞蹈效果。
LED灯光系统用于增加视觉效果,使舞蹈更加生动有趣。
总结起来,会跳舞的玩具的原理是利用电子技术和机械结构相结合,通过电池供电系统提供动力,通过电子控制系统控制舞蹈动作,通过马达或电机驱动机械组件实现动作,并通过其他辅助部件增加效果。
这些部件之间紧密合作,使玩具能够跳出各种各样的舞蹈动作,带给孩子们无尽的乐趣和惊喜。
机器人跳舞
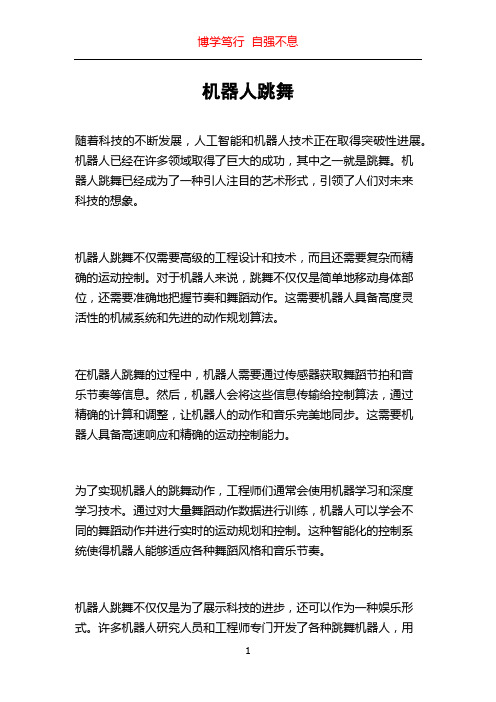
机器人跳舞随着科技的不断发展,人工智能和机器人技术正在取得突破性进展。
机器人已经在许多领域取得了巨大的成功,其中之一就是跳舞。
机器人跳舞已经成为了一种引人注目的艺术形式,引领了人们对未来科技的想象。
机器人跳舞不仅需要高级的工程设计和技术,而且还需要复杂而精确的运动控制。
对于机器人来说,跳舞不仅仅是简单地移动身体部位,还需要准确地把握节奏和舞蹈动作。
这需要机器人具备高度灵活性的机械系统和先进的动作规划算法。
在机器人跳舞的过程中,机器人需要通过传感器获取舞蹈节拍和音乐节奏等信息。
然后,机器人会将这些信息传输给控制算法,通过精确的计算和调整,让机器人的动作和音乐完美地同步。
这需要机器人具备高速响应和精确的运动控制能力。
为了实现机器人的跳舞动作,工程师们通常会使用机器学习和深度学习技术。
通过对大量舞蹈动作数据进行训练,机器人可以学会不同的舞蹈动作并进行实时的运动规划和控制。
这种智能化的控制系统使得机器人能够适应各种舞蹈风格和音乐节奏。
机器人跳舞不仅仅是为了展示科技的进步,还可以作为一种娱乐形式。
许多机器人研究人员和工程师专门开发了各种跳舞机器人,用于在商业活动和演出中展示。
这些机器人能够进行高难度的舞蹈动作,吸引了众多观众的注意。
机器人跳舞也有一定的教育和研究意义。
通过研究机器人跳舞的原理和技术,我们可以深入了解人类运动控制的机制和原理。
同时,机器人跳舞也可以被用于教育领域,帮助学生更好地理解舞蹈和音乐的关系,并激发他们对科学和技术的兴趣。
然而,机器人跳舞还面临一些挑战。
首先,机器人的灵活性和动作控制能力还远远不及人类。
虽然已经取得了很大的进展,但仍需要进一步改进机器人的力传感器和运动控制系统。
其次,机器人的能源问题也是一个困扰机器人跳舞的难题。
为了保持机器人的长时间运动,需要解决机器人的能源供应和能耗问题。
尽管机器人跳舞还面临一些挑战,但可以预见的是,随着科技的不断进步,机器人跳舞将会继续发展。
我们可以期待未来机器人跳舞技术的突破,以及机器人跳舞在更广泛领域的应用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
跳舞的机器人制作原理
跳舞机器人的制作原理是基于先进的机械工程、电子技术和人工智能技术的综合应用。
以下是跳舞机器人的制作原理的详细介绍:
1. 机械结构设计:跳舞机器人的外部形状需要经过设计师的构思和绘图,确定机器人的尺寸、比例和外形。
同时,机器人的身体需要具备柔软的关节和灵活的活动范围,以模拟人类的舞蹈动作。
2. 运动控制系统:在机械结构内部,安装有伺服电机、驱动器、传感器和控制电路等组件。
伺服电机用于驱动机械臂、腿部和其他关节,控制机器人的运动。
驱动器将来自控制电路的指令转化为相应的电信号,控制伺服电机的转动。
传感器用于检测机器人的位置、角度和力度,将这些信息反馈给控制系统,以实现对机器人的精确控制。
3. 动作规划和控制算法:机器人的动作是通过预先编程的动作规划和控制算法实现的。
动作规划是将舞蹈动作转化为机器人可执行的指令序列,包括身体各部位的位置和姿态。
控制算法负责根据规划好的动作指令,实时计算出每个关节的控制量,以确保机器人可以按照预定的舞蹈动作进行运动。
4. 人工智能技术:为了让机器人更精确地模仿舞蹈动作,人工智能技术可以被用来让机器人通过学习不同的舞蹈视频或者传感器数据来自主学习舞蹈动作。
通过深度学习和模式识别算法,机器人可以学习并识别不同的舞蹈动作,并将学到的知识应用
于实践中。
5. 硬件和软件集成:机器人的硬件和软件需要进行集成,确保它们能够正常协同工作。
本质上,机器人是由机械、电子和计算机以及相应的编程语言组成的综合系统。
通过将硬件和软件的功能进行协调和整合,机器人能够正确地执行动作规划和控制算法,并与人类进行交互。
跳舞机器人的制作原理包括机械结构设计、运动控制系统、动作规划和控制算法、人工智能技术以及硬件和软件的集成。
这些技术和原理的综合应用,使得机器人能够模拟人类舞蹈动作并实现动作的精确控制。