电液伺服系统在线辨识方案的设计
第7章 电液伺服系统的设计和应用
最大负载力为:32900N; 最大负载速度:0.022m/s
找阀控缸动力机构的输出特性与该负载轨迹相切, 并使两者的最大功率点尽量靠近,负载轨迹的最大 功率点可通过求导数并令其为零求得,其值为:
F 24860 N
v 0.0193 m / s
液压动力机构的最大功率点公式为:
2 F Ps A 3
欢 迎 使 用
《液压伺服与比例控制系统》
多媒体授课系统
燕 山 大 学
《液压伺服与比例控制系统》课程组
第7章 电液伺服系统的设计和应用
本章摘要
工程上常用频率法设计液压伺服系统,这是一种 试探法。根据技术要求设计出系统以后,需要检 查所设计的系统是否满足全部性能指标。如不能 满足,可通过调整参数或改变系统结构(加校正) 等方法,重复设计过程,直至满足要求为小。因 为设计是试探件的,所以设计方法具有较大的灵 活性。
Q0 I 1.1 10 5 s2 2 * 0.56 ( s 1) 2 250 250
光电检测其和伺服放大器可看成比例环节:
I K E
增益K可通过改变伺服放大器的增益在较宽的范围 内调整。计算液压缸的容积时,考虑到管道容积, 加上系数:
Vt LA 1.15 0.15 94.25 10 4 1.15 1.626 10 3 m 3
y 0.5E 1 10 3 m
系统的开环增益为:
vm Kv 22(1 / s) y
对上述系统进行动态分析:
5、修改动力机构参数,改善系统性能 (1)、确定活塞面积 系统不加校正,为保证增益和足够的稳定裕量,至 少应有: 4K 4 22 88rad / s
2、方案选择 选择合理控制方案,拟定大体结构,绘制系统原理方块图; 3、静态计算 根据系统要求和负载条件,选择动力机构的形式和参数。 (1)、确定供油压力; (2)、通过负载轨迹,求驱动力机构的匹配参数; (3)、选择伺服阀,根据系统的工作状态及精度要求, 确定系统的开环增益,选择传感器、放大器和其他元件; 4、动态分析计算。 (1)、列出各元件运动方程,求传递函数;。 (2)、绘出系统方块图、开环和闭环频率特性,分析系 统的稳定性,校核系统的频宽和峰值; (3)、通过仿真分析系统动态品质指标。
电液位置控制系统设计
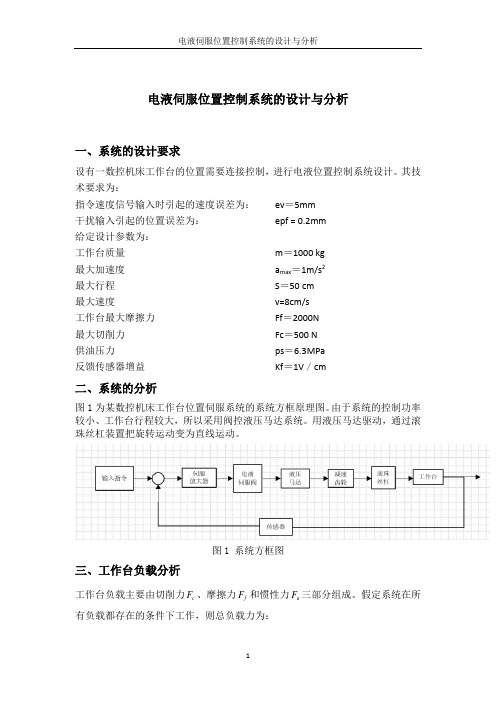
电液伺服位置控制系统的设计与分析一、系统的设计要求设有一数控机床工作台的位置需要连接控制,进行电液位置控制系统设计。
其技术要求为:指令速度信号输入时引起的速度误差为: ev =5mm 干扰输入引起的位置误差为: epf = 0.2mm 给定设计参数为: 工作台质量 m =1000 kg 最大加速度 a max =1m/s 2 最大行程 S =50 cm 最大速度 v=8cm/s 工作台最大摩擦力 Ff =2000N最大切削力 Fc =500 N 供油压力ps =6.3MPa 反馈传感器增益Kf =1V /cm二、系统的分析图1为某数控机床工作台位置伺服系统的系统方框原理图。
由于系统的控制功率较小、工作台行程较大,所以采用阀控液压马达系统。
用液压马达驱动,通过滚珠丝杠装置把旋转运动变为直线运动。
图1 系统方框图三、工作台负载分析工作台负载主要由切削力c F 、摩擦力f F 和惯性力a F 三部分组成。
假定系统在所有负载都存在的条件下工作,则总负载力为:max L c f a F F F F =++=3500N (1)四、动力元件参数选择(1) 工作台由液压马达经减速器和滚珠丝杠驱动。
根据力矩平衡方程,减速器输入轴力矩L T :/2L L T F t i π= (2)其中:t 为丝杠导程;i 为减速器传动比 液压马达最大转速max n 为:max max /n iv t = (3)其中:max v 为工作台的最大运动速度。
液压马达所需排量m Q 为6322/510m m L L Q D T p m ππ-===⨯ (4)其中:L p 为液压马达负载压力,一般取L p =23sp ,s p 为液压系统压力,m D 为液压马达弧度排量。
根据条件:i =2,t =1.2×210-m/r ,s p =63×105Pa 由式(2)、式(4)计算得:m D =0.8×610-3m /rad 所以,液压马达负载流量L q 为:536.6710/L q m s -=⨯ (5)伺服阀压降v p 为:max v s L p p p =- (6)考虑泄漏等影响,L q 增大15%, 4.6/min L q L =。
电液伺服控制系统的设计
Ap ——液压缸活塞的有效面积;x p ——活塞的位移; 液压缸活塞的有效面积; 活塞的位移; 液压缸活塞的有效面积 活塞的位移 Ctp--总泄漏系数;Vt——液压缸进油腔的容积;βe—— 总泄漏系数; 液压缸进油腔的容积; 总泄漏系数 液压缸进油腔的容积 系统的有效体积弹性模量。 系统的有效体积弹性模量。
电液位置伺服控制系统以液体作为动 电液位置伺服控制系统以液体作为动 力传输和控制介质,利用电信号进行控制 力传输和控制介质, 输入和反馈。 输入和反馈。只要输入某一规律的输入信 执行元件就能启动、 号,执行元件就能启动、快速并准确地复 现输入量的变化规律。 现输入量的变化规律。电液位置伺服控制 系统是最为常见的液压控制系统, 系统是最为常见的液压控制系统,实际的 伺服系统无论多么复杂, 伺服系统无论多么复杂,都是由一些基本 元件组成的。系统的核心是电液伺服阀, 元件组成的。系统的核心是电液伺服阀, 它的性能直接影响甚至决定整个系统的性 功用十分重大。 能,功用十分重大。
系统数学模型的建立
(式中 k1=1/Ap) 计算得到负载扰动引起的稳态 误差为:ess=0.057×10-3(m)
(1)比例阀线性化流量方程 ) Q L = K q xv − K c p L (1) ) 式中K 比例阀流量增益; 比例阀流量- 式中 q——比例阀流量增益;K c ——比例阀流量-压力 比例阀流量增益 比例阀流量 系数; 负载压力; 比例阀阀芯位移。 系数;p L——负载压力;xv——比例阀阀芯位移。 负载压力 比例阀阀芯位移 (2)伺服油缸流量连续性方程 )
系统的阶跃响应曲线
从上两幅图中可以看出, 从上两幅图中可以看出,系统的幅值裕度 与相角稳定裕度均为负值, 与相角稳定裕度均为负值,阶跃响应曲线 为发散振荡,说明系统是不稳定的, 为发散振荡,说明系统是不稳定的,必须 校正。 校正。
支持向量机在电液伺服系统辨识建模中的应用
摘
要 : 出 了电液伺服 系统 的支持 向量 机 的辨 识建 模 方 法。 利用 电液 伺服 系统 的 可测 参 量 , 提
建立 了 基于支持向量机的电液伺服 系统的模型。 以电液位置伺服 系统为例, 进行 了仿真实验。 仿真结果表明支持 向量机模型具有辨识精度 高, 推广性能好 的优 点, 从而验证 了该方法的正确
=
() 2 () 4
!
() 3
() s
2 基 于支持 向量机 的电液伺服系统建模方法
基 于 回归 型支持 向量 机 (V 的系统 的辨识 建模 问题 的提法 如下 : 设是 单输 入单 输 出系统 , S R) 假 给定一 个 系统 的输 入输 出时 间序列 集 D ={ ,。 } ∈R是 系统 的输入 变量数 据 , ( Y) , Y ∈R是 其输 出变量 数据 。 以这 些输入 一输 出数据集 为基 础 , 用 S R算 法 , 采 V 找到如 下所示 的 N R X 的函数关 系 : A MA ( )= Y k一1 , ,( k ( ) … Y k一凡 ,( ) Ⅱ k一1 , ,( m) ) … u k— ] 式 中:m, 分 别为输 入 、 出的延迟 。 / 1 , 输
性和 有效性 。
关键 词 : 支持 向量机 ; 回归型支持 向量 机 ; 电液伺服 系统 ; 系统 辨识
中图分类号 :T 2 6 3 P 0 . 文献标识 码 : A 文章编 号 :0 9— 5 6 2 0 ) 3— 0 3— 3 10 3 1 ( 0 7 0 0 4 0
电液伺 服控 制具 有反应 快 、 重量轻 、 尺寸 小和抗 负载 刚性 大等优 点 , 实现 大功率 、 精度 和快 响应 的 自 能 高 动化控 制 , 在航 空 、 航天 等领 域 已得到 广泛 的应用 ¨ 。因 此 , 究 电液伺 服 系 统 的辨 识 建模 方 法具 有 广 阔 J 研
电液伺服系统的设计与实现

电液伺服系统的设计与实现随着科技的不断发展,机械设备的功能和性能要求也越来越高。
而在众多机械设备中,电液伺服系统以其优良的性能和高效的工作模式,已经成为了广泛应用的设备之一。
本文将就电液伺服系统的设计和实现进行讨论,以期提高其性能和工作效率。
一、电液伺服系统的组成电液伺服系统是由3个部分组成的:电子控制单元、电液传动系统和执行机构。
1. 电子控制单元电子控制单元包括控制器和信号处理器,控制器是整个系统的核心。
它可以接收来自传感器的反馈信息,根据内部程序计算出控制信号,并输出到执行机构,实现对执行机构的精确控制。
2. 电液传动系统电液传动系统是整个电液伺服系统的动力源,它包括电液转换器、电动机、泵、油箱、阀门等组成。
电动机通过传动装置,驱动泵产生压力液体,液体经过阀门进入执行机构,实现机械臂等动作。
3. 执行机构执行机构是电液伺服系统的输出节点,它通过接收液压驱动,转换为机械运动。
在典型的电液伺服系统中,执行机构通常包括液压缸、液压马达、液压单元等。
二、电液伺服系统的优点1. 精度高因为电液伺服系统可以接收来自传感器的反馈信息,根据内部程序计算出控制信号,并输出到执行机构,实现对执行机构的精确控制,所以其控制精度很高,可以满足高精密度机械设备的要求。
2. 动态性能好电液伺服系统的调节速度快,反应灵敏。
它不仅可以适应于各种工况的需要,而且可以根据需要进行控制和调节。
相比之下,其他传动系统难以满足这些要求。
3. 可扩展性强电液伺服系统的结构比较清晰,它根据要求可以进行功能扩展。
同时,它也可以与其他的控制系统进行集成,如PLC、CAN总线等。
三、电液伺服系统的设计电液伺服系统的设计必须根据所需的实际应用来进行,下面简单介绍了一些设计方法。
1. 系统参数计算电液伺服系统的设计一定要进行系统参数计算,以确保正确的系统工作。
主要包括负载惯性、运动速度、加速度、油液流量、泵、马达的型号、离合器等参数的计算。
2. 控制系统设计控制系统设计是电液伺服系统设计的核心问题。
某扫雷车扫雷犁电液伺服系统辨识与控制
29 3
某扫 雷车 扫雷 犁 的电液伺 服 系统用 于控 制正
方案 : 先利用 基于遗 传优 化 的 B P神 经 网络进 行离
线辨识 , 经 网络辨识模 型与实 际系统模 型接 近 当神 到一定程度 时 , 用改 进 的快速 B 再利 P算 法 进行 在 线辨识 , 神经 网络 预测输 出与 系统实 际输 出之 以使 差最小 。在 获得满意 的系统模型后 , 研究 了扫雷 犁
G 0 Qa g ,I o g , 0 u n1n J ia A in JN Y n H U Y a og ,IL. n j
( . c ol f ca i l nier g N S N ni 10 4, hn ; 1 Sh o o h nc g ei , U T, aj g2 0 9 C ia Me aE n n n
进行 。仿 真研 究和样 机试 验结 果证 明 了所提 出辨 识 和控 制 方案 的有效 性和 正确性 。 关键 词 : 雷车 ; 雷犁 ; 扫 扫 电液伺服 系统 ; 经 网络 ; 线辨识 ; 神 在 离线辨识 ; 自适应 控 制
中图分 类号 :P 8 T 13 文章 编号 :0 5 9 3 ( 0 2 0 - 2 8 0 10 - 8 0 2 1 ) 2 0 3 - 7
newo k; n-i e mo e i g; f-ie mo ei g; da tv o to t r o ln d ln o ln d ln a p ie c n r l
收 稿 日期 :0 1 0 — 8 2 1 — 4 1
修 回 日期 :0 1 0 - 7 2 1 - 6 1
pee td T esh me cn ofra b t rslt n t te po lm h tte b c — rp g t n( P) e a rsne . h c e a f et oui o h rbe ta h ak po a ai B n u l e e o o r
伺服控制课程设计-电液位置伺服系统的设计与仿真
伺服控制课程设计 —— ——伺服控制课程设计
指导老师: 小组成员:机械工程及自动化
伺服控制的设计与仿真................................................................................................... 1 任务分工情况................................................................................................................................... 2 电液位置伺服系统的设计与仿真................................................................................................... 5 摘要................................................................................................................................................... 5 引言................................................................................................................................................... 5 一、设计任务与要求..............................................................
电液驱动Stewart平台模型参数辨识方法
Stewart 平台单通道电液位置伺服系统结构和
阶次都比较明确[8],可建立具有明确结构和阶次的
灰箱状态空间闭环辨识模型。选取状态矢量为
⎧ ⎪
x1
=
y
⎪ ⎪ ⎨
x2 x3
= =
y y
(1)
⎪ ⎪
x4
=
Q
⎪⎩x5 = Q
式中 y 、 y 、 y 分别为液压缸位移、速度和加速
度; Q 、 Q 、 Q 分别为伺服阀流量、流量变化率
(1. 哈尔滨理工大学机械动力工程学院 哈尔滨 150080; 2. 哈尔滨工业大学机电工程学院 哈尔滨 150001)
摘要:电液驱动 Stewart 平台是一个多输入多输出复杂并联机构, 各通道间存在严重负载交联耦合。在确定平台各通道性能参 数时,按照简单的阀控缸系统进行理论计算或系统辨识,结果和实际情况相差极大,这严重影响平台控制系统的设计和系统 性能的提高。为了解决上述问题,设计一种基于 Levenberg-Marquardt 寻优算法的六维互不相关信号激励的 Stewart 平台闭环 辨识算法,并应用于电液驱动 Stewart 平台试验样机。试验结果表明该辨识算法准确地辨识出平台通道性能参数,取得较满 意的辨识结果。
第 46 卷第 3 期 2010 年 2 月
机械工程学报
JOURNAL OF MECHANICAL ENGINEERING
Vo l . 4 6 N o . 3
Feb.
2010
DOI:10.3901/JME.2010.03.029
电液驱动 Stewart 平台模型参数辨识方法*
吴 博 1 邵俊鹏 1 吴盛林 2 赵克定 2
电液驱动 Stewart 平台作为一种结构复杂的并 联机构,各通道间存在严重负载交联耦合[4],其数 学模型的性能参数与相同结构的阀控缸系统相比差 别很大,无法通过阀控缸系统理论计算或参数辨识 获得。而平台单通道精确数学模型对分析系统性能、 设计高精度控制器,提高系统轨迹跟踪精度起着极 其重要作用。对 Stewart 平台各通道进行参数辨识获 得系统实际模型是解决上述问题有效途径。
5电液伺服控制系统分析与设计
1 稳定性 开环Bode图
只考虑液压缸和负载的动态特性时,系统稳定; 考虑反馈传感器、放大器、伺服阀相位滞后,系 统可能会不稳定。 稳定性受负载刚度影响。
谐振处的幅值
负载刚度减小,谐振幅值增大,稳定性变坏。
2 快速性
穿越频率
穿越频率随负载刚度变化。
负载刚度较小,频宽提高受负载刚度限制; 力控制系统中,负载变化。通过校正提高快速 性。
b K v nc h
1 Kv nc h 2 h
幅值频宽:幅频特性下降至-3dB对应的频率范围。
频宽近似等于闭环惯
性环节转角频率
ωb
系统开环穿越频率 ωc≈ ωb 因此频宽为ωc 对应I型系统 ωc ≈Kv
因此由开环Bode图可直接看出系统的快速性,开环
K v 2 hh
实测结果:
阀控缸液压阻尼比 通常在0.1~0.2左右
h
稳定性判据可写为
Kv (0.2 ~ 0.4)h
系统稳定后,还要求有一定的稳定裕度。 幅值裕度Kg≥6~12dB 相位裕度γ≥30~60°
例:若不考虑外干扰力,已知:
h 200rad / s
k v 20 1/s
h
s s 3 2 nc 2 1 2 s s 1 nc b nc
x p ( s) x pi ( s )
G s 3 1 G s s
2 h
1
2 h
Kv s2 s Kv
h
s s 3 2 nc 2 1 2 s s 1 nc b nc
带钢卷取机跑偏电液控制系统原理
伺服液压缸
伺服在线惯量辨识研究结果
KT Js
(6)
在 sc 已知的情况下,根据 | Gsc ( jsc ) | 1 ,即可求得比例增益 K sp :
0
K sp
J sc KT
(7)
另外,积分增益 K si 值可以根据 PI 转折角频率 pi 满足关系:
pi sc / 5
进一步:
' sc
J sc (rad / s) J
负载惯量变大的情况: 假如真实的系统惯量比变大了, 而我们还是按照初始化设定的负载惯量比运 行程序,那么很显然,实际的频率特性曲线将不会和图 2 中的红色曲线重合,它 会向左移动到绿色那条曲线,假如真实的负载惯量为 J ,那么真实的速度频宽 应为:
(8)
K si
实际伺服速度 PI 形式为:
2 J sc 5 KT
(9)
Gsp K sp Ki s s
(10)
1 K i sc 5
设积分时间常数为 i ,则:
(11)
i (ms )
取:
5000
sc
(12)
i (ms )
i 1
ˆ (k )h (k ) % zm ( k ) z ( k ) m
ˆ(k ) ——待辨识参数、可调模型参数(即待辨识参数估计值),其中, 式中 、
a1 ,L ana , b1 ,L bnb
ˆ I (k ) 、 ˆ P ( k ) ——自适应算法的积分输出、自适应算法的比例输出;
伺服在线惯量辨识研究
软件研发部:杨洪江 QQ:80033885
控制框图回顾
国产 90%仍然是三环控制架构 日系伺服包括第四环
个人观点:基于系统稳定性考虑
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
0 引 言
时 ,试验可在系统正常工作状态下完成 ,不需要断开 组 成系统 的部件 。根据系统 的输入 、输 出计算 出系统 的互相关 函数 ,就 可计算 出脉 冲响应 函数 g 7 ,对 () g r 取 拉 氏变 换 就 可方 便 的求 出系统 的传递 函数 。 () 当一个较 小 的 白噪声 信号 作 为试 验信 号加 入 到系 统 时 ,它仅 与系统 的输出相关 ,而与系统的其 它扰 动不 相关 ,所 以辨识 的精度 不受 噪声干扰 的影响。 但是 ,理想 的 白噪声很难 获得 。在工程上 常用伪 随机信号来 近似地代替 白噪声 。伪 随机信号是 以零对
L n I Me g,XU pi g, LILi g i g Ya n n bn
( c ol f ct nc otw s r oy c n a U iesy i n7 0 7 .C ia S h o o hr i,N r et nP l eh i l nvr t,X ’ 1 0 2 Me o h e t c i a hn )
根据实验的输入 输出建立数学模型的过程就是系 统辨识 。对 电液 伺服 系 统 的辨识 常 用频 域法 和 时域
法 ,而这两种方法通 常要求被测对象在离线状态 下测 试。采 用伪 随机信号进行相关 分析 ,能够使 系统 在不 停机的情况下进行在线辨识 。本文应用伪 随机信 号作 为系统 的输入信号 ,通过相关 分析 法进 行在线 辨识 , 得 出系统 的脉 冲响应 ,进而求 出其传递 函数 ,并进行 了仿真分析 和实验验证 。
1 伪 随机 信号 辨识 原理 若 系 统 输入 为 单 位 脉 冲 ( )=6 t ,输 出 为 t ()
中 图分 类 号 :T 2 1 P 7 文 献 标 识 码 :A 文 章 编 号 :10 —3 8 (0 8 0 1 8 1 2 0 )3— 9 3 0 5—
De i n o lne i ntfc i n M e h d o e t o h dr lc Se v y tm sg fOn i -de i ato t o n Elc r . y a i r o S se i
称 的由 + a和 一a两个 电平组 成 的周期 性 脉 冲序列 。
随着现代控制理论 的发展 ,系统辨识技术在工程 领域不断得 以应用 。近年来 ,辨识 技术也在液压系统 中发挥着 作用 。要 了解 一 个 电液伺 服 系统 的性 能 如 何 ,就必须弄清 电液伺服阀的静态特性 、动态特性及 它 的数学模型 ,这就要对电液伺服阀进行 系统辨识 。
20 0 8年 3月
机床与液压
M ACHI NE TOOL & HYDRAUL CS 1
M a. 0 8 r2 0
第3 6卷 第 3期
V0. 6 No 3 13 .
电液 伺服 系统 在 线 辨识 方 案 的设 计
李 蒙,徐娅 萍 ,李凌冰
( 北工 业 大学机 电学院 ,陕 西西安 7 0 7 ) 西 102
摘 要 :结合 用伪 随机信号 进行 系统 在线 辨识 的原理 ,采 用工控机 作 为控 制计 算装 置 ,辅 以 P L8 8 C .1 L数据采集 卡 ,设 计 了完 整的实验 系统 。并 对一 个具体的电液伺服系统进行 了在线辨识 ,通过 实验 验证了辨识结果的正确性 。
关键词 :伪 随机信号 ;电液伺服 系统 ;在线 辨识
Ab t a t sr c :T e p n i l f r c s y tm n l e i e t c t n w t s u o r n o sg a a n rd c d U i gI C t k o — h r cp e o o e ss se o — n n i ai i p e d a d m i n l si to u e . sn P o t e c n i p i d i f o h w a t l o n i ga s m l , md d b CL 8 8 aa a q ii o a d t ei tg ae x e i n a y tm a e i n d T e o l ei e t — o c r u t se by n e y P - 1 L d t c u st n c r , h ne r td e p r i me tls se W d sg e . h n i d ni s n i f c t n t o c ee eer — y rl ev y tm a are u ,a d t e ie t c t n r s l Wa ai ae h o g e e p rme t. ai o a c n r t lt h d ai s r o s se W c rid o t n h d n i ai e u t s v l td t ru h t x e o o c s i f o d h i ns
此外因为系统的输出值与前一段时间的输值图4加法放大电路和滤波电路图有关而系统在第一周期之前的输入值为0故伪随在实验时因为要求是在系统能够正常运行的情机信号第一周期的响应不具有伪随机信号响应的性况下对系统进行在线辨识故在辨识时给系统加了一质应予以剔除
维普资讯
它 的状态转换是在基 本事 件宽度 的整 数倍 的时刻 发生 的,转换前后两个状态是相互独立 的。本文采用 工业控制计算机 和 P L8 8 C -1 L多功 能数据 采集卡 来实 现伪随机信号的产生和输 出。 伪随 机 信 号 是 一 种 长周期信号 ,若观测时间 大于一个周期 ,便是确定 性周期信号 ,并显示 出它 的非随机性 ;若 观测时间 小于一个周期 ,它便是真