自动控制原理(梅晓榕)习题答案5
自动控制原理 课后习题答案(2020年7月整理).pdf

第1章控制系统概述【课后自测】1-1 试列举几个日常生活中的开环控制和闭环控制系统,说明它们的工作原理并比较开环控制和闭环控制的优缺点。
解:开环控制——半自动、全自动洗衣机的洗衣过程。
工作原理:被控制量为衣服的干净度。
洗衣人先观察衣服的脏污程度,根据自己的经验,设定洗涤、漂洗时间,洗衣机按照设定程序完成洗涤漂洗任务。
系统输出量(即衣服的干净度)的信息没有通过任何装置反馈到输入端,对系统的控制不起作用,因此为开环控制。
闭环控制——卫生间蓄水箱的蓄水量控制系统和空调、冰箱的温度控制系统。
工作原理:以卫生间蓄水箱蓄水量控制为例,系统的被控制量(输出量)为蓄水箱水位(反应蓄水量)。
水位由浮子测量,并通过杠杆作用于供水阀门(即反馈至输入端),控制供水量,形成闭环控制。
当水位达到蓄水量上限高度时,阀门全关(按要求事先设计好杠杆比例),系统处于平衡状态。
一旦用水,水位降低,浮子随之下沉,通过杠杆打开供水阀门,下沉越深,阀门开度越大,供水量越大,直到水位升至蓄水量上限高度,阀门全关,系统再次处于平衡状态。
开环控制和闭环控制的优缺点如下表1-2 自动控制系统通常有哪些环节组成?各个环节分别的作用是什么?解:自动控制系统包括被控对象、给定元件、检测反馈元件、比较元件、放大元件和执行元件。
各个基本单元的功能如下:(1)被控对象—又称受控对象或对象,指在控制过程中受到操纵控制的机器设备或过程。
(2)给定元件—可以设置系统控制指令的装置,可用于给出与期望输出量相对应的系统输入量。
(3)检测反馈元件—测量被控量的实际值并将其转换为与输入信号同类的物理量,再反馈到系统输入端作比较,一般为各类传感器。
(4)比较元件—把测量元件检测的被控量实际值与给定元件给出的给定值进行比较,分析计算并产生反应两者差值的偏差信号。
常用的比较元件有差动放大器、机械差动装置和电桥等。
(5)放大元件—当比较元件产生的偏差信号比较微弱不足以驱动执行元件动作时,可通过放大元件将微弱信号作线性放大。
自动控制原理梅晓榕习题答案
习题参考答案1-1工作原理当水位达到规定值时,浮子使电位器活动端处于零电位,放大器输出电压和电机电枢电压是零,电机停转,进水阀门开度不变。
水位高于规定值时,浮子使电位器活动端电位为正,放大器输出电压和电机电枢电压是正,电机正转,阀门开度减小,进水量减小,水位下降。
而水位低于规定值时,浮子使电位器活动端电位为负,电机反转,阀门开度变大,水位上升。
参考输入是电位器中的零电位,扰动量包括出水量和进水管压力的变化等,被控变量是水位,控制器是放大器,控制对象是水箱。
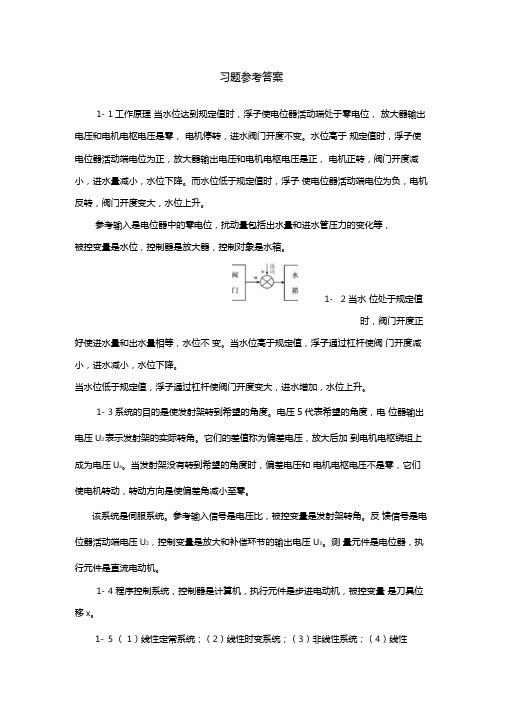
1- 2 当水位处于规定值时,阀门开度正好使进水量和出水量相等,水位不变。
当水位高于规定值,浮子通过杠杆使阀门开度减小,进水减小,水位下降。
当水位低于规定值,浮子通过杠杆使阀门开度变大,进水增加,水位上升。
1-3系统的目的是使发射架转到希望的角度。
电压 5代表希望的角度,电位器输出电压U2表示发射架的实际转角。
它们的差值称为偏差电压,放大后加到电机电枢绕组上成为电压U a。
当发射架没有转到希望的角度时,偏差电压和电机电枢电压不是零,它们使电机转动,转动方向是使偏差角减小至零。
该系统是伺服系统。
参考输入信号是电压比,被控变量是发射架转角。
反馈信号是电位器活动端电压U2,控制变量是放大和补偿环节的输出电压U3。
测量元件是电位器,执行元件是直流电动机。
1-4 程序控制系统,控制器是计算机,执行元件是步进电动机,被控变量是刀具位移x。
1-5 (1)线性定常系统;(2)线性时变系统;(3)非线性系统;(4)线性时变系统;(5)线性定常系统;(6)线性时变系统c )对X o 的引出点列方程。
k 1 (X iX o ) k 2X o f (X iX o )0 fX o(k 1k 2)x °权 KxX o (s) fs K2-1 a) m3 kx(t)dtF(t)X(s) F(s)1 ms2 kb )取m 的平衡点为位移零点,列微分方程。
2d x(t) m A dt 2f 警kX (t )卡⑴X(s) F(s)I 1/I 2ms 2 fs k2-2 设A B 点及位移X 见图中(b ),(d )-AA图机械系统a )对质量m 列方程。
自动控制原理第五章习题及答案

第五章习题与解答5-1试求题5-1图(a)、(b)网络的频率特性。
u r R1u cR2CR2R1u r u c(a) (b)题5-1图R-C网络解(a)依图:⎪⎪⎪⎩⎪⎪⎪⎨⎧+==+=++=++=2121111212111111221)1(11)()(RRCRRTCRRRRKsTsKsCRsCRRRsUsUrcττωωτωωωωω11121212121)1()()()(jTjKCRRjRRCRRjRjUjUjGrca++=+++==(b)依图:⎩⎨⎧+==++=+++=CRRTCRsTssCRRsCRsUsUrc)(1111)()(2122222212ττωωτωωωωω2221211)(11)()()(jTjCRRjCRjjUjUjGrcb++=+++==5-2某系统结构图如题5-2图所示,试根据频率特性的物理意义,求下列输入信号作用时,系统的稳态输出)(tcs和稳态误差)(tes(1)tt r2sin)(=(2))452cos(2)30sin()(︒--︒+=ttt r题5-2图反馈控制系统结构图解 系统闭环传递函数为: 21)(+=Φs s 频率特性:2244221)(ωωωωω+-++=+=Φj j j 幅频特性: 241)(ωω+=Φj相频特性: )2arctan()(ωωϕ-=系统误差传递函数: ,21)(11)(++=+=Φs s s G s e 则 )2arctan(arctan )(,41)(22ωωωϕωωω-=++=Φj j e e(1)当t t r 2sin )(=时,2=ω,r m =1则 ,35.081)(2==Φ=ωωj 45)22arctan()2(-=-=j ϕ4.1862arctan )2(,79.085)(2====Φ=j j e e ϕωω )452sin(35.0)2sin()2(-=-Φ=t t j r c m ss ϕ)4.182sin(79.0)2sin()2(+=-Φ=t t j r e e e m ss ϕ(2) 当 )452cos(2)30sin()(︒--︒+=t t t r 时: ⎩⎨⎧====2,21,12211m m r r ωω5.26)21arctan()1(45.055)1(-=-===Φj j ϕ 4.18)31arctan()1(63.0510)1(====Φj j e e ϕ )]2(452cos[)2()]1(30sin[)1()(j t j r j t j r t c m m ss ϕϕ+-⋅Φ-++⋅Φ=)902cos(7.0)4.3sin(4.0--+=t t)]2(452cos[)2()]1(30sin[)1()(j t j r j t j r t e e e m e e m ss ϕϕ+-⋅Φ-++⋅Φ=)6.262cos(58.1)4.48sin(63.0--+=t t5-3 若系统单位阶跃响应h t e e t tt ()..=-+≥--11808049试求系统频率特性。
《自动控制原理》5章课后习题参考答案.

+
1(
10000(6
.311
2e +=
S S S G
1001.0(11.0(1(1.0(d +++=
S S S S S G 61
.054
.0154.0,
11(2
2
=+==+=
K K
A ω
ωω010
s
900.257.3180 2.16rad
tg ωωω----∙︒=-=,(
(
5
.1,
(5
(6 (7
5.12
K增大和T减少
((1(1(1m K
K s s Ts Ts K
s T s K
Φ=
≈
+++++
K
T m 21=
ζ ,不变(稳定裕度不变
2
22
(12(121b n ωωξξ=-+
-+
5.13
11=+=
p
ssr K e 35
.01
12
416==
=
v
ssr K e %
8.4%100%2
1=⨯=--ξ
πξ
σe 05
.006.13
==≈
ቤተ መጻሕፍቲ ባይዱεξ
ω,S t n s s
rad n n c 8.2707.0707.02=∙=ωωω=0
63
=γdB K g s rad g ∞=∞=ω0,1==r r M ωs
rad n b 4==ωω0
1
1
11006
.787.53.841001.01001.0180180=-=∙-=-+-=----tg
自动控制原理(梅晓榕)习题答案
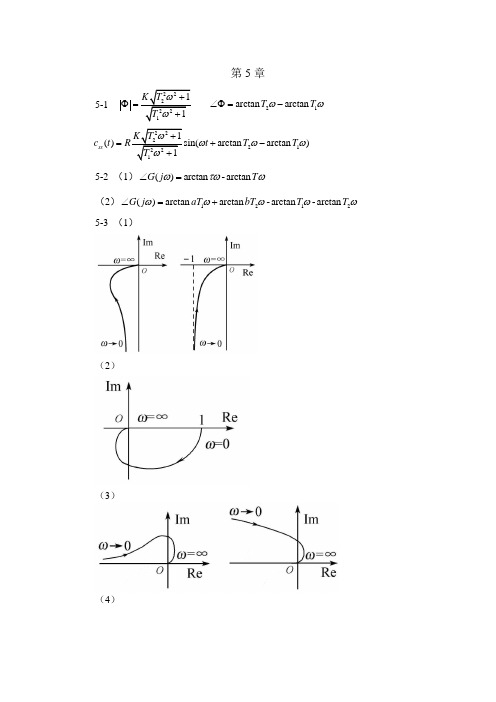
第5章5-1 222212211 arctan arctan 1K T T T T ωωωω+Φ=∠Φ=-+222212211()sin(arctan arctan )1ss K T c t Rt T T T ωωωωω+=+-+5-2 (1)()arctan -arctan G j T ωτωω∠=(2)1212()arctan arctan -arctan -arctan G j aT bT T T ωωωωω∠=+ 5-3 (1)(2)(3)(4)(5)(6)(7)(8)5-4(1)(3)(4)(6)(7)(8)(1)(2)(3)(4)(6)(7)(8)(10)5-6 (a )12100()11(1)(1)G s s s ωω=++ (b )231221(1)()1(1)s G s s s ωωω+=+(c )112211()11c s G s s s ωωωω⎛⎫+⎪⎝⎭=⎛⎫+ ⎪⎝⎭(d )123()11(1)(1)s G s s s ωωω=++ 5-7 (a )稳定 (b )稳定 (c )稳定 (d )不稳定(e )不稳定 (f )不稳定 (g )不稳定 (h )稳定5-8 (a )不稳定 (b )稳定 (c )稳定 (d )稳定 (e )稳定 5-9 (a )不稳定 (b )稳定 (c )稳定 5-10 稳定5-11 1:稳定 2:不稳定 3:稳定 4:不稳定 5-12 不稳定5-13 o 73γ= 此题传递函数改为(0.561)()(1)(0.11)(0.0281)K s G s s s s s +=+++或 幅值穿越频率 5.13rad/s c ω=,o 46.5γ=。
5-14(1)(j )48.2c G ω∠=-,o 131.8γ=(2)(j )155.4c G ω∠=-,o 24.6γ=5-15 o o o (1)55 20dB/dec (2)-15.840dB/dec (3)-52.860dB/dec --- ,,, 5-16s 2s1s3p1p 2p3t t t σσσ<<=< ,5-17 (1)o 54.9 20lg g K γ==∞,,系统稳定。
自动控制原理梅晓榕习题答案
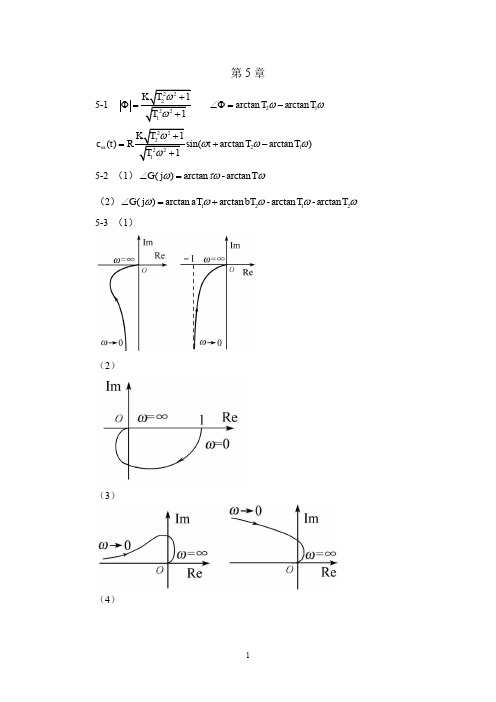
第5章5-121arctan arctan T T ωωΦ=∠Φ=-21()arctan arctan )ss c t t T T ωωω=+-5-2 (1)()arctan -arctan G j T ωτωω∠=(2)1212()arctan arctan -arctan -arctan G j aT bT T T ωωωωω∠=+ 5-3 (1)(2)(3)(4)(5)(6)(7)(8)5-4(1)(3)(4)(6)(7)(8)(1)(2)(3)(4)(6)(7)(8)(10)5-6 (a )12100()11(1)(1)G s s s ωω=++ (b )231221(1)()1(1)s G s s s ωωω+=+(c )112211()11c s G s s s ωωωω⎛⎫+⎪⎝⎭=⎛⎫+ ⎪⎝⎭(d )123()11(1)(1)s G s s s ωωω=++ 5-7 (a )稳定 (b )稳定 (c )稳定 (d )不稳定 (e )不稳定 (f )不稳定 (g )不稳定 (h )稳定5-8 (a )不稳定 (b )稳定 (c )稳定 (d )稳定 (e )稳定 5-9 (a )不稳定 (b )稳定 (c )稳定 5-10 稳定5-11 1:稳定 2:不稳定 3:稳定 4:不稳定 5-12 不稳定5-13 o 73γ= 此题传递函数改为(0.561)()(1)(0.11)(0.0281)K s G s s s s s +=+++或 幅值穿越频率 5.13rad/s c ω=,o 46.5γ=。
5-14(1)(j )48.2c G ω∠=-,o 131.8γ=(2)(j )155.4c G ω∠=-,o 24.6γ=5-15 o o o (1)55 20dB/dec (2)-15.840dB/dec (3)-52.860dB/dec --- ,,, 5-16s2s1s3p1p2p3t t t σσσ<<=< ,5-17 (1)o 54.9 20lg g K γ==∞,,系统稳定。
自动控制原理第五章课后习题答案(免费)[1]
![自动控制原理第五章课后习题答案(免费)[1]](https://img.taocdn.com/s3/m/11139471f46527d3250ce001.png)
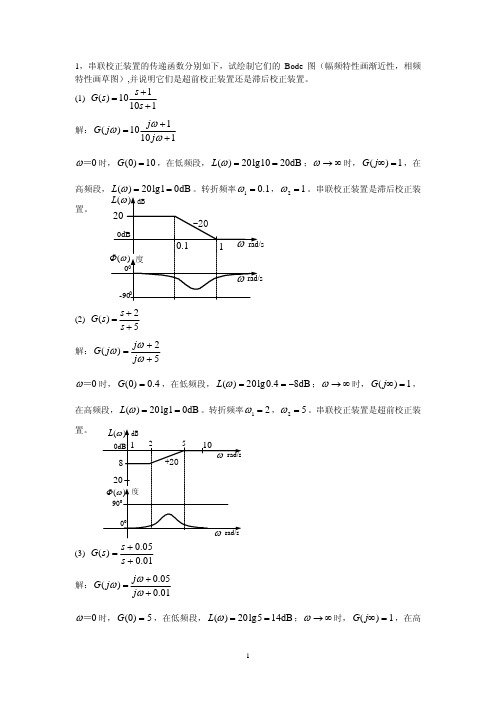
自动控制原理第五章课后习题答案(免费)5-1设单位反馈系统的开环传递函数为对系统进行串联校正,满足开环增益 及 解:① 首先确定开环增益K,00()12lim v s K SG S k →===② 未校正系统开环传函为:012()(1)G s s s =+M a g n i t u d e (d B )1010101010P h a s e (d e g )Bode DiagramGm = 70.5 dB (at 200 rad/sec) , P m = 16.5 deg (at 3.39 rad/sec)Frequency (rad/sec)③ 绘制未校正系统的开环对数频率特性,得到幅穿频率 3.4c ω=,对应相位角'0()164,16c G j ωγ∠=-∴=,采用超前校正装置,最大相角 0(180())4016630m c G j ϕγωγ=-+∠+=-+=④ 11sin ,31m αϕαα--=∴=+ 0()(1)KG s s s =+40γ=︒112K s -=⑤ 在已绘图上找出10lg 10lg3 4.77α-=-=-的频率 4.4m ω=弧度/秒 令c m ωω=⑥0.128/,0.385/m T s T s ωα=⇒==∴=校正装置的传函为:110.385()110.128Ts s G s Ts s α++==++校正后的开环传函为:012(10.39)()()()(1)(10.13)c s G s G s G s s s s +==++ 校正后1801374340γ=-=>,满足指标要求.-100-50050100M a g n i t u d e (d B )101010101010P h a s e (d e g )Bode DiagramGm = 99.2 dB (at 1.82e+003 rad/sec) , P m = 42.4 deg (at 4.53 rad/sec)Frequency (rad/sec)5-2设单位反馈系统的开环传递函数为要求 设计串联迟后校正装置。
《自动控制原理》第5章习题答案
G0 ( s ) =
1 s (0.1s + 1)
特征方程为, D( s ) = 0.1s 2 + s + 1 = 0 ,即,s + 10 s + 10 = 0 ,
2
ω n = 10 = 3.162 , ζ =
10 = 1.58 ,原系统为过阻尼系统, 2ω n
2
σ % = 0 , ts >
4
ζω n
解: G ( jω ) =
ω=0 时, G (0) = 0.4 ,在低频段, L(ω ) = 20 lg 0.4 = −8dB ; ω → ∞ 时, G ( j∞) = 1 ,
在高频段, L(ω ) = 20 lg1 = 0dB 。转折频率 ω1 = 2 ,ω 2 = 5 。串联校正装置是超前校正装 置。
-j 3.46
②计算期望主导极点位置。 系统期望闭环主导极点具有阻尼系数 ζ =
2 ,自然振荡频率 ω n = 4 2 , 2
θ = arccosζ = arccos
2 = 450 , 则 一 个 具 有 期 望 极 点 的 2 阶 系 统 特 征 方 程 为 , 2
s 2 + 8s + 32 = 0
jω
期望极点
期望极点
− p3
j
600
j0.58
− p2
-1
− p1
0 -j
-3
-2
σ
-2
19.150 -1
40.880 0.33 0
119.640
校核相角条件: 根据在图中主导极点位置的近似值-0.33 ± j 0.58 和开环极点的位置, 作由各开环极点到期望主导极点的向量,
Φ = -119.640 -40.880 -19.150 = -179.670≈-1800
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第5章
5-1
21 arctan arctan T T ωωΦ=
∠Φ=-
21()arctan arctan )ss c t t T T ωωω=+-
5-2 (1)()arctan -arctan G j T ωτωω∠=
(2)1212()arctan arctan -arctan -arctan G j aT bT T T ωωωωω∠=+ 5-3 (1)
(2)
(3)
(4)
(5)
(6)
(7)
(8)
5-4(1)
(3)
(4)
(6)
(7)
(8)
(1)
(2)
(3)
(4)
(6)
(7)
(8)
(10)
5-6 (a )12100
()11
(1)(1)
G s s s ωω=++ (b )23122
1
(
1)()1(1)s G s s s ωωω+=+
(c )11221
1()11c s G s s s ωωωω⎛⎫
+
⎪
⎝⎭=⎛⎫+ ⎪⎝⎭
(d )123
()11(1)(1)s G s s s ωωω=++ 5-7 (a )稳定 (b )稳定 (c )稳定 (d )不稳定 (e )不稳定 (f )不稳定 (g )不稳定 (h )稳定
5-8 (a )不稳定 (b )稳定 (c )稳定 (d )稳定 (e )稳定 5-9 (a )不稳定 (b )稳定 (c )稳定 5-10 稳定
5-11 1:稳定 2:不稳定 3:稳定 4:不稳定 5-12 不稳定
5-13 o 73γ= 此题传递函数改为(0.561)
()(1)(0.11)(0.0281)
K s G s s s s s +=
+++
或 幅值穿越频率 5.13rad/s c ω=,o 46.5γ=。
5-14(1)(j )48.2c G ω∠=-,o 131.8γ=(2)(j )155.4c G ω∠=-,o 24.6γ=
5-15 o o o (1)55 20dB/dec (2)-15.840dB/dec (3)-52.860dB/dec --- ,,, 5-16
s2s1s3p1p2p3t t t σσσ<<=< ,
5-17 (1)o 54.9 20lg g K γ==∞,,系统稳定。
(2)o -46.5 20lg -g K γ==∞,,系统不稳定。
5-18 o 100(0.11)
()1045(1)(0.011)
c s G s s s s ωγ+=
==++ ,,
r r n 1 2 3ζζθζθζωM M 曲线说明 * * 大 由图 * * 小 大, 小 * * 大 小, 大大 由
n n n n ζωζωζωζωωs p p * 大 * 由图 * 大 小 由 及t * 小 大 与反比σ * * 大 小,σ 大大 大 由
说明:以下各设计题目,一般都有多种解。
5-19 超前补偿法。
固有部分(待补偿系统) 0100
()(0.041)
G s s s =
+
超前补偿 c 0.041()0.0081s G s s +=
+;设计后 e 100
()(0.0081)
G s s s =+
滞后补偿法。
固有部分 010
()(0.041)
G s s s =
+
滞后补偿 c 110
()10101s G s s +=+;设计后 e 100(1)
()(0.041)(101)
s G s s s s +=++ 5-20 K =10,c 0.51
()0.151
s G s s +=+ 等等。
提示:可利用二阶系统公式。
5-21 c e 2
(21)(0.21)100(21)
()()(66.71)(0.11)(66.71)(0.11)s s s G s G s s s s s s +++=
=++++ ;等等
5-22 11(1)100(1)
1616()()11(1)(0.11)(1)160160c e s s G s G s s s s s ++==
+++; 等等 5-23 (101)10(101)
() ()(1001)(1001)(1)(0.251)
c e s s G s G s s s s s s ++=
⇒=++++等等
5-24 11
(
1)(1)
0.37.6()11(1)(1)0.067143
c s s G s s s ++=++
2111000(1)(1)
0.37.6()(1)(0.91)(0.0071)0.067
e s s G s s s s s ++=
+++ 等等 5-25 根据二阶系统的计算公式。
0.00635h K =,反馈补偿后的开环传递函数为16000
()(141.6)
G s s s =+。
5-26反馈补偿后系统的开环传递函数为 215150
()0.1(115)(10150)
G s s h s s s h =
=++++
0.0967h =
5-27 110200K K ==,,c ()200(0.11)
s
H s s =
+
5-28 1171(
1)710(1)3535()()11(1)(0.11)(1)(0.0011)400400
c e s s G s G s s s s s s s ++==++++,等 5-29 0 1.41()(1)(1)
1010000
G s s s =++;11(1)(1)
2.510()10011(1)(1)0.26100c s s G s s s s ++=++等
5-30 补偿装置的对数频率特性见图。
)120
1
)(121()141
(20)(+++=s s s s s G e 0201arctan 41arctan 120
1)
141
(10)()()(0>-=∠++==ωωc e c G s s s G s G s G ,
补偿装置是超前网络,本身相位角为正,可提高相位裕度。
图 对数频率特性
5-31 K =2000,)14.01)(12001()
131.0)(191
()(++++=s s s s s G c 等等
5-32 11
(1)(1)
1.510()411(1)(1)0.36200
c s s G s s s ++=++ 等等
5-33 K =200,1
(1)
10()1
(1)3
c s G s s +=+
5-34 11
(1)(1)3503
10()300(1)(1)0.4140
c s s G s s s ++=⋅++ 等等 5-35 2
0.0167()0.21
c s H s s =+
5-36 2
0.0020.91 ()0.005 ()0.11c c c s H H s s H s s =-==+;;
5-37 20.63(0.11)
() 3.51
c s s H s s +=+ 等等
5-38 0.283()0.251
c s
H s s =+
5-39
→→→→123222111ω 0 1/ 1/ 1/ (s) s T s T s T T ∞T T T KT KT K K
G 2
32222
1113 s 20lg (j ω) 20lg 20lg 20lg 20lg ωωωωKT KT K K
G T T T T
5-40
(1)2
n
222
n n n 22
22n n n n n n
2()
()()212s s Y s G s X s s s Ks
Ks s s ωζωωωωζωωωζωω++===++++++ 2n
22
n n n
2(1)2K s s ωωζωωζ
=
+++
阻尼比 n
(1)2K ωζζζ
+
>,可见微分反馈可增加系统阻尼比。
(2)2n
2
n n 2222
n
n n n n (2)()
()()21(1)(2)
s s Y s G s X s s s K s Ks s s ωζωωωζωωωζω+===++++++ 2n
2
2
n n n
2(1)2K s s ωωζωωζ
=
+++
阻尼比 n
(1)2K ωζζζ
+>,可见微分反馈补偿系数K 可增加系统阻尼比。