空压机的DCS控制
火电厂空压机DCS技术改造应用
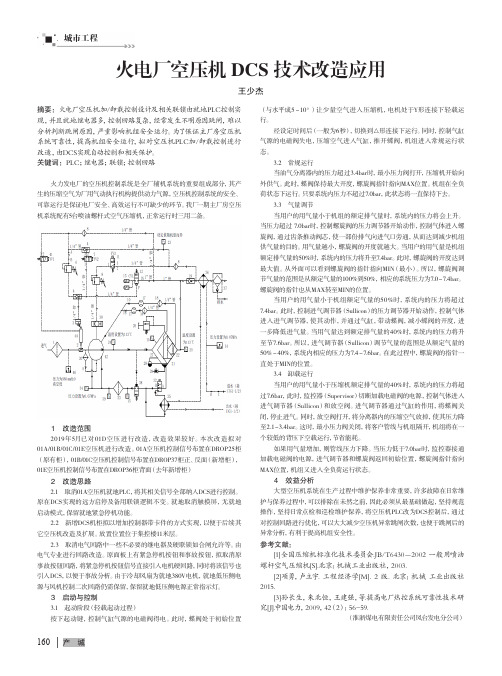
城市工程160产 城火电厂空压机DCS技术改造应用王少杰摘要:火电厂空压机加/卸载控制设计及相关联锁由就地PLC控制实现,并且就地继电器多,控制回路复杂,经常发生不明原因跳闸,难以分析判断跳闸原因,严重影响机组安全运行。
为了保证主厂房空压机系统可靠性,提高机组安全运行,拟对空压机PLC加/卸载控制进行改造,由DCS实现自动控制和相关保护。
关键词:PLC;继电器;联锁;控制回路火力发电厂的空压机控制系统是全厂辅机系统的重要组成部分,其产生的压缩空气为厂用气动执行机构提供动力气源,空压机控制系统的安全、可靠运行是保证电厂安全、高效运行不可缺少的环节。
我厂一期主厂房空压机系统配有5台喷油螺杆式空气压缩机,正常运行时三用二备。
1 改造范围 2019年5月已对01D空压进行改造,改造效果较好。
本次改造拟对01A/01B/01C/01E空压机进行改造。
01A空压机控制信号布置在DROP25柜(原有柜),01B/01C空压机控制信号布置在DROP37柜正、反面(新增柜),01E空压机控制信号布置在DROP36柜背面(去年新增柜)2 改造思路2.1 取消01A空压机就地PLC,将其相关信号全部纳入DCS进行控制。
原在DCS实现的远方启停及备用联锁逻辑不变。
就地取消触摸屏,无就地启动模式,保留就地紧急停机功能。
2.2 新增DCS机柜拟以增加控制器带卡件的方式实现,以便于后续其它空压机改造及扩展。
放置位置位于集控楼11米层。
2.3 取消电气回路中一些不必要的继电器及硬联锁如合闸允许等。
由电气专业进行回路改造。
原面板上有紧急停机按钮和事故按钮,拟取消原事故按钮回路,将紧急停机按钮信号直接引入电机硬回路,同时将该信号也引入DCS,以便于事故分析。
由于冷却风扇为就地380V电机,就地低压侧电源与风机控制二次回路仍需保留,保留就地低压侧电源正常指示灯。
3 启动与控制3.1 起动阶段(轻载起动过程)按下起动键,控制气缸气源的电磁阀得电。
空压机的DCS控制资料

空气透平压缩机在DCS自动控制中的应用和操作吴建平王键(江苏沙钢集团制氧项目办,江苏张家港市锦丰镇,215625)摘要:本文详细介绍了沙钢21000Nm3/h空分装置空气透平压缩机自动控制的原理、逻辑联锁,以及改用CENTUM CS3000控制的组态设计和操作方法。
关键词:空气透平压缩机;集散控制系统;防喘振控制;压力控制;启动、加载、卸载以及事故联锁;软件组态;作者简介:吴建平(1965-):男,工程师,现任江苏沙钢集团氧气厂副厂长,项目办副主任,主管制氧项目仪电条线工作。
先后负责筹建了六套21000Nm3/h制氧机组。
王健(1976-):男,工程师,主任协理,1999年毕业于上海理工大学,现从事制氧项目的工艺和仪表条线工作。
一、前言沙钢集团650万吨热卷板工程配套6套21000Nm3/h无氢制氩工艺流程的空分装置,主体设备为杭氧生产。
空压机采用美国Cooper公司3MSG--25/10型三级压缩的空气透平压缩机,配套ABB公司9800KW电机,软启动器为HTR—10000S柜式高压热变电阻。
目前五套制氧机已经投产、第六套在建。
其中第一、二套空压机的控制系统采用原厂专用QUAD2000控制器(单片机),后由于空压机控制器及其电源问题频繁停车就决定后四套装置改用DCS系统(Yokogawa Centum CS3000)控制,沙钢自行组态设计,从三台已投用空压机的使用情况来看完全能达到原厂控制器的相同效果。
二、空压机改用DCS控制的方案和过程1、开停车的控制方案我们将空压机的压力、温度、振动、位移、电流等模拟量直接接入DCS,DCS到电控的开关量信号通过机旁PLC执行控制。
并可实现“电控”现场开停车或远程“DCS”全自动开停车功能。
空压机的控制要求压缩机在空分工艺要求的压力、流量变化范围内安全运行,实现机组的启动、加载、卸载、故障联锁停车等一系列自动控制功能。
核心内容是DCS系统根据出口压力和电机电流的测量值通过多个控制模块调节入口导叶阀IGV 和防喘振放空阀BOV(快速气动阀)两者的开度,使两阀协调动作保证出口压力稳定、工况远离喘振区(详见图1)。
制氧DCS系统的合理化自动控制20070807

制氧DCS系统的合理化自动控制摘要制氧是一项复杂的模拟联锁控制的工程,要求技术人员对整个生产过程进行控制,监视,管理和决策.而DCS系统先天性的模拟量处理能力和可靠的技术措施,有利地保障了制氧安全经济地运行.本文结合黑建龙制氧工艺,阐述了DCS系统的网络结构通讯,模拟量联锁控制,逻辑运算能力和软件的可靠性。
关键词:DCS 网络结构模拟量逻辑运算联锁控制Rationalization automation of DCS used in oxygen makingyanglifeng(Heilongjiang Jianlong Steel Ltd. Equipment department Automation room)AbstractThe oxygen manufacture is a complex simulation interconnection control project, the request technical personnel carries on the control to entire production process, Surveillance, Management and decision-making. But DCS system congenital simulation quantity handling ability and reliable technical measure, Safeguarded the oxygen manufacture security to move economically advantageously. This article unifies constructs the oxygen manufacture craft of Heilongjiang Jianlong Steel Ltd, elaborated the DCS system network architecture communication, the simulation quantity interconnection control, logic operation ability and the software reliability.Key words:DCS network architecture simulation logic operation interlock control前言黑龙江建龙钢铁公司制氧厂设计为2套13000NM3/h 制氧机,采用上海福克斯波罗公司的I/A S eries DCS自动控制系统。
制氧机空气压缩机组的DCS自控及改进

制氧机空气压缩机组的DCS自控及改进应用DCS控制空气压缩机可以提高效率和经济效益。
文章主要介绍和分析了制氧机空气压缩机组的自控内容和原理,并提出了改善其停车事故频发的改进方法。
标签:空气压缩机组;恒压控制;改进方法1 引言空气压缩机有非常广的应用层面,例如在炼钢、炼铁、供水等行业,作为这些行业不可缺少的氧气供给来源,其应用量非常大。
但是,低效率和高故障率的传统空气压缩机组并不能满足钢铁等行业迅猛发展的要求。
近些年来,随着分布式控制系统的发展,使得用DCS对空气压缩机组进行控制成为了可能,使用DCS 对其进行控制的普及,起到了对空气压缩机组的改造和完善的作用,有效的提升了空压机的自动化水平,配合更为先进调节器和传感器,还可以对控制回路进行简化,可以轻松实现执行逻辑功能,提高了回路调节的能力。
应用DCS自控系统进行控制,除了具有很好的控制效果外,还具有较强的抗干扰能力,对工作环境要求不高,大大提升了空压机组运行的安全稳定性,此外,其经济效益也非常显著。
2 自控内容和原理2.1 基本控制根据空气分压工艺的特点要求,对空压机机组的控制可采用恒压控制方式。
此外,为了提升空气压缩机在运行时的稳定性,还考虑加设防喘振控制、事故联锁停车控制等安全保护控制。
2.2 恒压控制作为空气压缩机常用的一种控制方法,恒压控制能在机组容量改变时,保证压缩空气以接近恒定压力输出。
利用恒压控制空气压缩机,其转速在拖动电动机是不变的,主要是通过控制入口导叶的开度来实现的,而调节导叶则需要用到恒压控制器,它的作用是在空气压缩机的出口处对空气压力进行采集,将采集到的数据作为输入量,再比较所设定值,最后利用PID调节器将输入量进行调节,得到的输出量用来对入口导叶的开度进行调控。
2.3 安全保护控制2.3.1 防喘振保护控制空气压缩机喘振现象主要包括:空气压缩机的动力来源,即电动机的电流表和功率表有较大的波动量;空气压缩机剧烈振动,出口压力升高后迅速下降,气流伴有较大的噪声,且其流量大幅下降,甚至有吸气管道空气倒流现象。
空压机控制进DCS系统优化

空压机控制进DCS系统优化摘要:仪用气作为火力发电厂的“第二保安电源”,其重要性愈加突出,蒲城电厂二期空压机控制系统,原设计在就地独立控制,没有纳入DCS控制系统,为提高机组仪用气系统可靠性,将空压机控制系统纳入DCS控制系统,优化空压机运行方式,提高企业管理效益,同时拓展热控设备控制技术空间。
关键词:空压机 DCS 控制1、前言蒲城电厂二期空压机配置4台GA90/132空压机,单台空压机采用阿特拉斯造Elektronikon电脑控制器MKⅢHR进行就地控制,4台空压机由1台ES100电脑控制器进行集中控制,04年时ES100电脑控制器损坏,无法进行集中控制,只能由每台空压机本身MKⅢHR控制器控制,没有压力联动,只能4台空压机同时转动,靠就地MKⅢHR控制器进行本地加载、卸载控制,能源消耗大,空压机长期运转,机械部分损耗大,经常超温跳机,由于没有远控,运行人员不能及时发现异常工况,给机组安全运行造成很大威胁。
2、改造方案对单台空压机控制系统,拆除原有的MKⅢHR控制器,采用S7200PLC进行基地式控制,实现单台空压机的启动、停止、各个温度测量、报警、保护、加载、卸载、运行周期自动累计等。
空压机控制单元柜装有西门子TD400文本操作器,它可以显示本台空压机的运行状态、运行参数和报警信息等。
通过TD400可对单台空压机进行启动、停止、加载、卸载等操作,实现全中文界面。
集中控制采用1台S7-300PLC控制系统,实现对4台空压机运行参数收集,根据系统压力对4台空压机实现自动启停控制,同时可将空压机运行所有参数传输给#3、4机组DCS,用于运行人员监视,操作。
3、系统构成如图所示该控制系统由上、下位两部分组成。
下位系统由西门子S7-300PLC、S7-200PLC组成控制系统,完成对空压机的就地控制和运行参数采集。
下位机之间采用PROFIBUS协议通讯,上位系统由DCS局域网组成,采用MODBUS协议与下位机实时通讯,进行空压机的远程控制,并读出相关运行参数,加以动态显示。
药业空压机控制系统DCS的应用
放, 便于故障分析和操作, 并且具有较长的历史记录可 查。
天津金耀集团有限公司的动力车间为保证生产用
气, 安装 了 3 台 500 m3 /m in 的汽 拖 离心 空 压机, 2 台 250 m3 /m in的电拖压缩机, 控制系统采用 DCS控制。
1 系统组成
图 1 系统框图 F ig. 1 B lock d iagram o f system
!自动化仪表 ∀第 28卷增刊 2007年 9月
2 工艺流程和控制方案 [ 4]
汽拖空压机工艺流程如图 2所示。
图 2 工艺流程图 F ig. 2 T echno log ica l process
2. 1 润滑油泵联锁控制 当润滑油压低于某 一定 值时, 自 动启 动联锁 备用
泵。 2. 2 油箱温度加热控制
输入模块实时处理各种温度、压力、流量、振动、位 移信号, CPU 中的组态程序 根据输 入信号 值的变 化而 不断调整控制; 输出模块根据 CPU 的计算结果 输出控 制信号到执行机构。 1. 3 操作站及工程师站
操作站由两台 DELL计算机、两台显示器 组成, 计 算机通过以太网与 控制站实 时交 换数据, 供操作 人员 实时监控现场工况, 如进、出口工艺气体的温度、压力、 流量、压差等参数, 机 组振 动值、轴 位移、轴承温 度; 机 组气、油、水路 阀 门、吸 风阀 开 度以 及 油、水 系 统 的压 力、温度以及油路压差等。
tro lm ethod are studied. Thus higher level o f autom atic contro l of a ir com pressors and turbine is mi plem ented.
K eyw ords: DCS Centrifugal a ir com pressor Surge proof Steam turbine Ferm entation
空压机联动控制说明

空压机联动控制说明一、系统说明:空压机联动控制是我公司KY02S型空压机运行控制器中一项重要功能。
应用于多台空压机组成一个供气网络,给同一个气罐供气的场所。
空压机控制器地址从1开始顺序编号,网络中最多允许16台空压机控制器,1号机设为主机,其余空压机设为从机,主机中设定联机控制加载压力、卸载压力、联机台数及联机控制延时时间。
主机启动后,自动进入联机控制模式。
比较供气压力与设定联机控制压力,选取网络中空压机发送控制命令,控制网络中空压机的启动停机、自动稳定供气压力、平衡网络中各空压机的运行时间。
联动控制能避免因空压机的频繁启停,损坏设备及减少对电网冲击,达到节能效果。
二、系统设置:1、主机设置:在设备已停止状态下按“↓”键进入如下界面。
选择用户参数。
按“→”键进入操作方式预置,设置通信方式为:联动。
通信编码设为:0001,返回用户参数界面,选择联动参数预置,按“→”进入联动参数设置,联动状态设为:主机,联动启停设为:顺序,轮换时间、联动机数、联动压力下限、联动压力上限、联动延时时间根据用户实际情况设定。
注意(联动压力下限与联动压力上限值应在供气加载压力与供气卸载压力值之间)。
2、从机设置:在设备已停止状态下按“↓”键进入上图所示界面。
选择用户参数。
按“→”键进入操作方式预置,设置通信方式为:联动。
通信编码从0002到0016,(注意,网络中不允许有两台设备编码相同)。
返回用户参数界面,选择联动参数预置,按“→”进入联动参数设置,联动状态设为:从机。
从机的联动启停,轮换时间,联动机数,联动压力下限,联动压力上限,联动延时时间等不用设置。
三、网络连接:联动控制网络需采用屏蔽效果好的通信线将网络中空压机运行控制器的通信端口A、B 并联起来,布线过程中应尽量避免强电干扰。
信号线与电源线分走不同管道。
网络结构示意如下图所示:四、运行联动控制:用户确认设定好网络中各空压机的联动控制参数,连接好通信线后,起动主机,系统自动进入联动控制状态。
空压机控制模式切换
二期空压机控制模式切换操作步骤及注意事项现在二期仪用空压机控制模式都为“遥控”,待机方式为“遥控待机”,若需要将控制模式切换为“就地”,需要输入密码,密码为随机给定。
“遥控”、“就地”切换操作如下:1、复位就地控制面板——按DSP键。
2、先按“*※”键,后按“PRG”键显示当前密码(密码为随机,范围从0~999)3、确定就地面板显示密码三位、两位或者一位【面板显示密码若为三位数,则选取后两位×10+10(乘10然后加10);若为两位数或一位数,则选取该两位或该一位×2+3(乘2然后加3)。
计算的得数则为进入更改面板更改模式的密码】4、在控制面板上调整密码至计算过后的数值(按△或▽¤调整,可长按,进行数十数百位跳步)5、调整面板密码至计算数值后,按PRG键确定,继续按PRG键至NO.31选项更改控制模式(按△或▽¤调整):遥控、挂起(就地)、MODBUS、编号、时间、主从。
6、选定“遥控”或者“挂起(就地)”后,按PRG确定,按DSP键复位。
7、复位后,按PRG键至NO.31选项确定空压机当前控制模式,当前模式为所需模式后可按DSP键复位至参数监视画面。
注意事项:1、空压机运行时,“挂起(就地)”至“遥控”模式切换,可能引起该空压机运行信号消失,导致跳闸,在“挂起(就地)”切换至“遥控”模式时,可在DCS盘上先发空压机启动信号,再切换该空压机控制模式;“遥控”模式至“挂起(就地)”模式切换不会有此现象。
2、备用空压机在“遥控待机”模式,DCS未投联锁时,启动此空压机需排气压力(P2)低于该空压机设定加载压力;停止此空压机需等排气压力(P2)高于该空压机设定卸载压力(各个空压机的加载压力与卸载压力可在就地控制面板设定);在联锁投入时,该备用空压机在压缩空气母管压力低于0.5Mpa时联启。
3、空压机就地面板密码可重复操作步骤2获得。
张珂2010-5-8。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
空气透平压缩机在DCS自动控制中的应用和操作吴建平王键(江苏沙钢集团制氧项目办,江苏张家港市锦丰镇,215625)摘要:本文详细介绍了沙钢21000Nm3/h空分装置空气透平压缩机自动控制的原理、逻辑联锁,以及改用CENTUM CS3000控制的组态设计和操作方法。
关键词:空气透平压缩机;集散控制系统;防喘振控制;压力控制;启动、加载、卸载以及事故联锁;软件组态;作者简介:吴建平(1965-):男,工程师,现任江苏沙钢集团氧气厂副厂长,项目办副主任,主管制氧项目仪电条线工作。
先后负责筹建了六套21000Nm3/h制氧机组。
王健(1976-):男,工程师,主任协理,1999年毕业于上海理工大学,现从事制氧项目的工艺和仪表条线工作。
一、前言沙钢集团650万吨热卷板工程配套6套21000Nm3/h无氢制氩工艺流程的空分装置,主体设备为杭氧生产。
空压机采用美国Cooper公司3MSG--25/10型三级压缩的空气透平压缩机,配套ABB公司9800KW电机,软启动器为HTR—10000S柜式高压热变电阻。
目前五套制氧机已经投产、第六套在建。
其中第一、二套空压机的控制系统采用原厂专用QUAD2000控制器(单片机),后由于空压机控制器及其电源问题频繁停车就决定后四套装置改用DCS系统(Yokogawa Centum CS3000)控制,沙钢自行组态设计,从三台已投用空压机的使用情况来看完全能达到原厂控制器的相同效果。
二、空压机改用DCS控制的方案和过程1、开停车的控制方案我们将空压机的压力、温度、振动、位移、电流等模拟量直接接入DCS,DCS到电控的开关量信号通过机旁PLC执行控制。
并可实现“电控”现场开停车或远程“DCS”全自动开停车功能。
空压机的控制要求压缩机在空分工艺要求的压力、流量变化范围内安全运行,实现机组的启动、加载、卸载、故障联锁停车等一系列自动控制功能。
核心内容是DCS系统根据出口压力和电机电流的测量值通过多个控制模块调节入口导叶阀IGV 和防喘振放空阀BOV(快速气动阀)两者的开度,使两阀协调动作保证出口压力稳定、工况远离喘振区(详见图1)。
V3002放空阀(带电磁阀、气动放大器)仅作为BOV阀的补充和空冷系统压力低联锁放空使用,不参与核心控制。
入口导叶阀IGV 和防喘振放空阀BOV均设有自动“AUTO”和手动“MAN”两种操作位置,以便于人为干预操作。
手动时分别为手操器MIGV和MBOV。
BOV(防喘振放空阀):气闭式、4-20mADC(0-100%);IIC3200 :电机过载保护模块;PIC3009:出口压力控制模块;FIC3200:防喘振控制模块;PIC3011:压力帽控制模块;MBOV:防喘振阀手操器;MIGV:入口导叶手操器;HC3001:V3001送气阀手操器;PIC3002:V3002放空阀控制模块。
图1 空压机气路控制图2、空压机的控制原理(图2)2.1 恒压控制空分装置的工艺要求空压机的出口压力尽可能恒定(设计值为0.52Mpa表压),这是整个装置的最基本的控制要求。
空压机出口压力由恒压控制器PICS3009调节(设定值SV为系统实际所需压力值),控制对象为入口导叶IGV。
2.2电机过载保护控制当空分装置后系统压力持续低于空压机出口压力设定值(例如设备大气量进行加温吹扫时),恒压控制器将控制入口导叶持续开大直至全开,此时拖动电机有可能过载。
为了防止电机过载,引入电机过载保护控制器IIC3200(设定值SV为电机额定电流)调节导叶开度。
当电机电流超过额定值时,电机过载保护控制器与恒压控制器进行低选,限定入口导叶的开度,保护电机不过载。
当然开车过程中也可以通过调整IIC3200控制器的电流设定值来限定入口导叶的开度达到变负荷、低负荷工况操作的目的。
注:KIY3001A:加载速率限定模块;KIY3001B:卸载速率限定模块;KPY3009 :防喘振曲线计算模块;KPY3011:压力帽计算模块;AS1、AS2、AS3:低值选择器;FOUT:分配器。
图2空压机控制原理图2.3防喘振控制(流量控制)透平空压机运行过程中始终存在压力和流量匹配的问题(具体表现为压力和电机电流),特别是出现高压力小流量的情况极可能导致压缩机发生喘振,严重时损坏机组(引起高压力小流量的原因主要有操作不当或后系统故障引起的气量骤减等情况)。
因此防喘振控制是非常重要的,目的是使压缩机始终工作在限定的范围内,而不进入喘振区,以确保机组的的安全运行。
防喘振控制的对象是放空阀BOV。
当空压机工作点靠近喘振区时提前打开放空阀增大流量使工作点远离喘振区。
PIC3009图3 防喘振控制曲线图压缩机发生喘振时每个压力对应一个最小电流值,压力与最小电流值呈线性关系构成喘振曲线(详见图3)。
喘振线需在现场试车过程中实测出来(通常测得3个喘振点,选择最合适的2点)。
由于喘振发生得非常快,所以在喘振线右侧设定一条防喘振控制曲线调节放空阀提前打开,与喘振线相距5∽8%的流量值(不取电流量程,否则能损大)。
此偏移量越小,放空阀打开的机会就越少,能量损失越少,但也越容易受阀门响应影响进入喘振线以内;该量越大,放空阀打开的机会就越大,能量损失越大,但越能保证机组的安全。
该偏移量值的选择很关键,需在开车过程中试验摸索。
计算方法如下:Y轴对应压力;X轴对应电流。
喘振线方程式:Y=aX+b,将测得的2点喘振值代入方程式,求出a和b 的值就能确立喘振线。
防喘振控制曲线方程式:X′=(1+C)*(Y-b)/a,C取8%。
控制原理图2中,KPY3009和FIC3200两控制器串级后构成防喘振功能,KPY3009控制器根据喘振曲线和防喘振控制曲线方程式计算出相应电流,FIC3200控制器调节放空阀开度,其设定值SV为控制曲线电流,随空压机出口压力变化而变化。
机组工作点一旦达到喘振线,防喘振阀将快速全开卸压(MBOV 转手动),想升压时MBOV打自动位置。
2.4 压力帽控制对于恒压控制的压缩机,单靠入口导叶的调整还不足以确保出口压力稳定在设计值,当压力继续升高并达到某一值时,压力帽控制器开始起作用打开放空阀,与防喘振控制器低选,保护出口压力不再升高。
压力帽控制器实际上还起到预开放空阀的作用。
2.5启动联锁逻辑在相关工艺和机械条件全部满足后,按“复位”键程序初始化:(1)所有报警、联锁信息复位。
(2)入口导叶阀IGV处于手动全关状态,BOV阀处于手动全开状态。
(3)加载限定器处于手动0位,卸载限定器处于手动0位。
同时开空压机前电控、仪控正常保证DCS NR=1(即无报警)、TRIP=0(即无联锁)、STOP CP=1(即无停车事故,压缩机启动逻辑条件满足)才可正常开车。
从流程画面调用STOPCP位号,只有当STOPCP=1时,可立即开车,按“启动”键。
在启动联锁程序中原设计测振仪的振动联锁倍增功能,但实际上起动过程中测振仪经常超量程引起停车联锁,所以在启动程序中设计了“振动联锁”“振动复位”开关,启动前振动联锁开关解除。
空压机启动成功后10秒IGV阀位置于10%,空压机低负荷运转。
此时按“振动复位”键将振动联锁信息初始化,然后按“振动联锁”键将振动、位移事故联锁程序投用,当然此过程也可设计成程序控制完成。
2.6加载控制空压机电机启动50秒后才可以加载,计时时间一到流程图有操作信息弹出提示。
操作人员根据情况可选择自动加载和手动加载方式。
自动加载过程:操作工选择自动加载方式时,先将恒压控制器PIC3009、手操器MIGV和MBOV均打自动位置,然后按“加载”键进入加载程序。
此时加载速率限定器KIY3001A开始起作用(在35秒内MIGV开度从10%慢慢升至100%,同时MBOV开度从0%升至100%),与PIC3009、IIC3200控制器低选后调节入口导叶慢慢打开,与FIC3200、PIC3011控制器低选后调节防喘振阀慢慢关闭,详见控制原理图2。
此时操作工在防喘振曲线流程图上可以实时监视压缩机的工作点,工作点在控制线右侧向上向右移动。
手动加载过程:操作工选择手动加载方式后,入口导叶手操器MIGV和防喘振阀手操器MBOV均打手动位置,慢慢打开入口导叶的同时慢慢关闭防喘振阀,两阀协调操作,保证机组出口压力稳定上升,远离喘振区。
加载结束后两手操器置于自动位置。
2.7卸载控制卸载时按流程图画面上的“卸载”键:(1)手操器MBOV 自动转手动,BOV阀位从当前值一下子降到0%快速全开;(2)卸载速率限定器KIY3001B开始起作用,同时手操器MIGV转手动位置,限定IGV阀位在10秒内从当前值降到10%,空压机小负荷运转。
此时如需加载,两手操器需转自动位置,然后按“加载”键空压机自动加载。
如需停车按“停车”键。
2.8 停车联锁逻辑当机组出现任何一个重要的工艺参数(比如振动、轴瓦温度等)高高报或机组故障时,将紧急停车,以确保机组的安全。
停车逻辑是电机停车,BOV阀快速全打开,IGV阀关至10%。
计划停车过程:操作工按“停车”键,机组先卸载慢关入口导叶到10%,防喘振阀快速全开,压缩机卸载至小负荷,然后停主电机,停车过程结束。
故障联锁停车分为两种情况:(1)由于停车联锁条件满足(TRIP=1)而引起的停车过程,停压缩机,防喘振阀快速全开,入口导叶慢关至10%;(2)在中控室紧急按钮台按下紧急按钮,电控直接停车(不经过电控PLC),防喘振阀快速全开,入口导叶慢关至10%。
故障停车处理后再起动时,必须经人工复位初始化。
2.9辅助油泵联锁逻辑电机未启动或油压PIAS3104<110Kpa辅助油泵启动;当电机启动50秒后并且油压PIAS3104>190Kpa时辅助油泵停机。
2.10油箱加热器联锁当辅助油泵运转并且供油温度TIAS3105<30℃时油箱加热器投运;供油温度TIAS3105>40℃或者空压机启动时油箱加热器停机。
三、组态设计Centum CS300集散控制系统具有强大的数据采集、过程控制、逻辑控制、顺序控制等功能,采用Windows2000操作系统界面友善(这也是改用DCS的原因),所以设计控制方案时尽量对操作人员开放以便于监视和操作。
3.1流程图设计5个画面窗口,图中设计设备运转、停运的色变(运转时变红色、停运时变绿色),伴随信息报警提示操作人员。
(1)空压机气路控制图:图中有参与控制IGV、BOV两阀的主要PID控制器,同时在位号下标示PID控制器的输出值MV,并将“启动、加载、卸载、停车、复位、振动复位、振动联锁”等按键置于图上。
(2)空压机机械监控图:此图主要有振动、位移、轴承温度位号以及油录系统。
(3)空压机启动条件图:图中将所有空压机启动条件以表格形式列出以供操作工随时查看,各位号设计色变功能,条件满足信息报警提示。