船舶机舱监控系统共55页
船舶机舱监控系统

轮机工程学院船电系
船舶电气系统设计
船舶机舱监控系统
六.二氧化碳含量传感器 1.作用:检测锅炉中排烟二氧化碳含量
2.原理图
轮机工程学院船电系
船舶电气系统设计
船舶机舱监控系统
七.转速传感器 1.测速发电机 1)种类 直流式和交流式 2)直流式(较少) U=K*n 3)交流式 2.磁脉冲式转速传感器
轮机工程学院船电系
船舶机舱监控系统
九.主机工况监视传感器 1.气缸套温度检测传感器
轮机工程学院船电系
船舶电气系统设计
船舶机舱监控系统
2.活塞环检测传感器
轮机工程学院船电系
船舶电气系统设计
船舶机舱监控系统
3.气缸套磨损检测传感器
轮机工程学院船电系
船舶电气系统设计
船舶机舱监控系统
第三节 船舶火警探测与报警系统 一、火警报警系统原理 1、分路式火警报警系统 2、环路式火警报警系统
船舶机舱监控系统
轮机工程学院船电系
船舶电气系统设计
船舶机舱监控系统
轮机工程学院船电系
船舶电气系统设计
船舶机舱监控系统
报警回差
轮机工程学院船电系
船舶电气系统设计
船舶机舱监控系统
轮机工程学院船电系
船舶电气系统设计
三. 监控与报警系统的组成
船舶机舱监控系统
1、传感器(执行器) 2、采集单元 3、通讯单元 4、中央处理单元(含监视屏、控制柜、UPS、 键盘等) 5、延伸报警单元
船舶电气系统设计
船舶机舱监控系统
外形、安装、布置设计
控制柜 防护(IP、Ex) 安装方式 处所 接线
基于无线网络的船舶机舱自动化监控系统

基于无线网络的船舶机舱自动化监控系统摘要:为了提高船舶自动化水平和船舶监测系统的性能,船舶舱自动监测设计十分重要。
船舶机舱自动监测系统在船舶运行中发挥着重要作用,例如控制船舶推进系统中主机和辅助设备的运行状况;实时监控运行参数,出现异常时报警;使用各种光电和机械传感器监测船舶推进轴系统参数等。
通信网络模块在船舶机舱监控系统中发挥着重要作用。
通信网是监控系统控制单元与报警单元之间的信息传输渠道,通信网结合了扩展遥控单元和信息基站,使监控系统成为有效运行的系统。
关键词:无线网络;船舶机舱;自动化;监控系统引言在科学技术不断攀升的当下,关于“无人机舱”的概念早已出现,并经历了将近半个世纪的研究与发展。
时至今日,我国在船舶机舱自动化监控系统的研发上已取得了较为瞩目的成绩。
1自动化监控系统的发展20世纪50年代以来,船舶自动化,特别是电子技术的发展,引入了“船舶自动化”的概念,主要包括三个领域:机械自动化、导航和方位自动化。
但是,监测工具仅限于目前的电子技术水平,也面向通用仪器,机舱内只应用一个自动控制装置来实现某些船舶的自动化,如船舶主机、锅炉、压力、温度和液体调节。
个别设备尚未形成完整、集中控制、独立和独立的系统。
20世纪70年代初,数字计算机进入机器控制领域时,飞机监控系统中出现了典型的代表——CCS(计算机控制系统)。
该系统的一个典型特征是在一个集中控制的空间中集中监控和控制能耗和内阁系统,该空间具有强大、快速、小型或中型计算机。
该监测系统是如此渐进,以监测数百个参数,这些参数代替数十个模拟控制器,如温度、压力、粘度、速度等。
数据传输仍然通过AI和AO模拟信号进行,这些信号引用DI、DO、模拟0-5V或4-20mA电路。
整个系统中的数据采集设备成本高昂、复杂且成本高昂。
集中系统会导致可靠性问题,可能导致整个系统轻微故障或瘫痪,从而严重限制其发展。
1990年代以来,新建船舶利用网络微型监测系统,随着现场总线技术的不断发展和现场总线技术在技术控制的其他领域的成功应用而使用,现场总线技术已应用于船舶监控中,这是一种完全分布式的监控系统(也称为局部总线控制系统(FCS)),它将现场总线作为进一步限制监控功能的每个子系统的内部控制网络。
KCHIEF网络型监测报警与控制系统
五、操作站OS
• 1、组成和功能
• 组成:标准PC微机、操作控制面板CRP、触摸 屏TCP 、显示器和打印机等。
• OS通常位于集控室,驾驶台、货油控制室、船 舶办公室等场所也可以配备OS,各OS之间通 过双冗余的Ethernet网相连。
• OS通过CAN总线接受DPU单元送出的现场信 息,并可向DPU发送指令、参数和程序。OS可
第7页/共72页
DATACHIEF C20系统
第8页/共72页
第9页/共72页
ROS
ROS
Ethernet
Ethernet
WBU
WCU
WCU
WCU
WCU
ROS / GW no.1
Watch Calling system
C A N W.Call
ROS / GW no.2
Distributed Processing system
• CAN现场总线与以太网组成的双网络系统各自采 用双冗余方案。CAN网主要用于现场信息的采集 、转换和控制。CAN总线分成Local和Global两 个分段,两个分段各自又是双冗余的。Ethernet 网是高速网,负责系统信息的管理,OS之间的数 据传送借助于Ethernet网进行。
• 系统网关(SGW)用来使CAN和Ethernet两种 不同的网络实现互联;dPSC用来实现同一CAN 网中分段总线(如Local CAN和Global CAN )
第25页/共72页
DPU单元
(DISTRIBUTED PROCESSING UNIT)
• 1、DPU模块的类型
• DPU有模拟量输入、热电偶输入、模拟量 输出、数字量输入、数字量输出模块或输 入输出混合模块(RIO C1~C4,用于电 站系统)等各种类型,可以根据需要选用 。通道数为(8~32)。
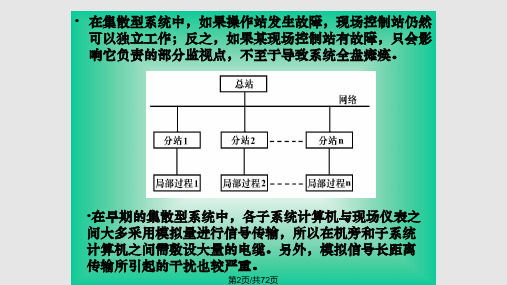
船舶安全管理动态监控系统
船舶安全管理(动态监控)系统一、系统概述:本系统涉及到船舶卫星通信系统、船舶局域网、船舶管理信息系统、电子海图、船舶自动识别系统(AIS)以及陆地通信网络、机关办公网络等多方面的技术,是能将电子海图数据、气象数据、船舶管理数据、机舱工况数据、AIS数据以及卫星通信系统整合在一个信息平台上的船舶全球动态监控系统。
二、系统功能:1、电子海图系统基本功能:是信息服务平台的显示界面,各类船舶信息服务的最直观的体现。
功能如下:·海图显示与控制功能:是船舶动态显示和跟踪的基础,包括对海图的放大、缩小、漫游操作、开窗放大显示、分层显示、海图要素信息查询、海图打印等;·海图计算功能:用于测量海图上任意两点间的距离和相对方位,还可以测量任意点与某条船舶的距离以及与该船航向的相对方位;·海图标绘功能:标注临时性的区域,该区域可能是船舶航行中需要关注的区域;·台风标绘功能:直观显示出台风的运行轨迹和未来趋势,为船舶监控提供支持;2、航行信息调取功能:航行信息(经纬度、航速、航向)是管理决策的基础数据,要求全面、准确、及时。
可提供多路由的船位数据获取功能:·通信设备的多样性:包括海事卫星C站、D站、安保系统可通过AIS、CDMA/GPRS、铱星、北斗等;·技术的多样性:系统运用了群呼、单呼、船舶定时报、报文寻呼、手动录入、文件导入等技术手段获取船位;3、航行管理功能:设计船舶航线,对船舶实时监控。
提供航线设计的导入功能,可将设计的航线传输到陆地后导入本系统,以便管理。
4、气象信息管理功能:·气象信息叠加:系统提供接口,连接相关机构提供的气象数据,显示在海图上;·台风信息叠加:可直观地显示出台风的运行轨迹和未来趋势;·潮汐信息:提供全球港口潮汐信息叠加功能。
5、船舶监控功能:·船舶航行信息监控:监控船舶位置、航向、航速,并可根据船舶的历史位置显示航迹;·台风监控:监控台风与船舶的相对位置,当船舶位置落在台风的大风半径范围内时,可发出警报,及时通知监控人员采取措施;·移动监控:对某条应该处于停航状态的船舶进行监控,判断其是否处于停航状态,如果发现船位变化,则发出警报。
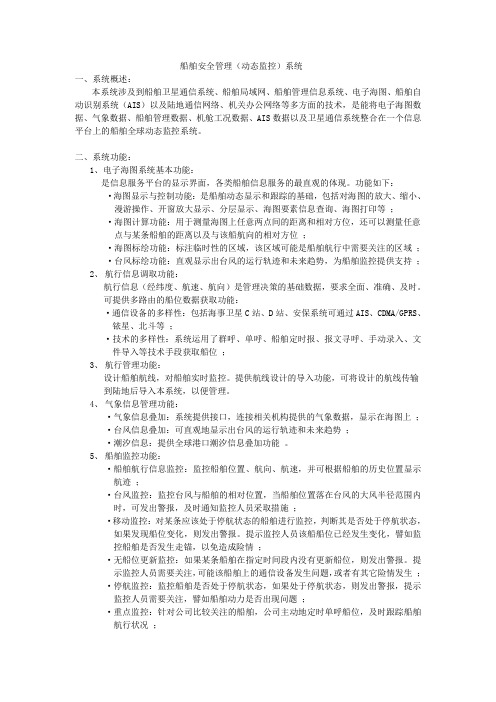
船舶航行远程监控技术 72页PPT文档
时隙0 时隙0
1帧 1分钟
当前时隙
时隙2249 时隙2249
当前帧 下一帧
例如:一个船位报告占用数据链路上的一个时隙,其他类型的报文 可以使用多于一个时隙,一份报文具体使用时隙的数目视具体情况而定, 但最多不能超过5个时隙。
2.船舶远程监控的基本原理与实现方法
VDR
VDR可以获取的信息:
——操作信息:车钟指令和回令数据,主机油门/螺距操作、转舵操 作和实际舵角、推进器、侧推器等数据。
1.概述
船舶交通管理系统
(VTS——Vessel Traffic Services)
VTS具备监视水域船舶运动并对船舶提供信息、建议和指示的手段, 它能与船舶相互作用并能有效控制船舶交通流,从而在获得最大的港口 营运效益同时使船舶交通事故和环境污染的风险减至最小。
1.概述
我国的VTS发展经历了三个阶段:
1.概述
船舶自动识别系统
(AIS——Automatic Identification System)
2019年IMO对将于2019年7月生效的SOLAS公约中,增加了“通用船载 自动识别系统(AIS)”和“航行数据记录仪(VDR)”,船舶强制性装 备AIS的时间表是:最迟2019年7月1日前,国际航线300总吨以上的船舶; 国内航线客船及500总吨以上的船舶;安装AIS。
1.概述
2019年12月23日,挪威一 艘邮轮M/S Explorer,搁 浅在南极。
2019 年1 月 18日, 英国 一 艘集装箱轮 MSC Napoli,侧翻在位于 大西洋和加勒比海之间的 英属维尔京群岛附近。
1.概述
巴拿马散装船M/V New Flame,2019年8月12日, 在直布罗陀海峡与一艘丹麦油轮相撞。
机舱集中监控与报警系统课件

节能与环保
系统可实现对飞机能耗的实时监 控,为飞行员提供节能建议,降 低飞行成本,同时减少对环境的
影响。
系统在其他领域的应用
1 2
铁路交通
机舱集中监控与报警系统可应用于铁路机车,实 现对机车各项设备的实时监控与故障诊断,提高 铁路运营效率与安全性。
船舶航运
系统将船舶的机舱设备纳入监控范围,保障船舶 航行安全,降低船舶运营成本,提高航运效率。
打开电源、启动相关设备等。
初始化过程
02 阐述系统在启动后进行的初始化过程,如加载配置文
件、初始化传感器等。
系统自检
03
介绍系统的自检机制,包括对各个子系统的检测、对
传感器的校准等,以确保系统正常运行。
监控与数据采集
监控对象
说明系统需要监控的对象,如温度、压力、流量等关键参数。
数据采集方式
介绍系统如何采集数据,包括通过传感器实时采集、从历史数据库 中读取等。
故障诊断方法
观察法
通过观察系统运行状态、指示灯、报 警信息等,初步判断可能的故障类型 和位置。
仪器检测法
利用专业检测仪器对系统各个部件进 行检测,获取详细数据,进一步确定 故障原因。
替换法
对于疑似故障的部件,可以通过替换 相同型号的正常部件来进行验证,以 确定故障部位。
软件诊断法
通过运行故障诊断程序,对系统软件 进行检查和分析,找出可能的软件故 障。
组成结构
机舱集中监控与报警系统通常由传感器网络、数据采集与处理单元、报警控制 单元和人机界面等部分组成。
系统发展历程
01
早期系统
早期的机舱监控与报警系统通常采用独立的监控设备和报警装置,缺乏
统一的集中管理系统。
第10章船舶机舱监视与报警系统
第10章船舶机舱监视与报警系统
报警内容: 1)、报警; 3)、输出分组报警信号至延伸报警单元; 4)、起动报警记录打印机。
长时报警和短时报警
第10章船舶机舱监视与报警系统
2.模拟量报警控制单元 组成:测量回路、比较环节、延时环节和逻辑 判断环节
逻辑原理图:
第10章船舶机舱监视与报警系统
测量环节:把传感器模拟信息转换成相应的电压信号,监测 传感器故障;
比较环节:故障报警鉴别; 延时环节和逻辑判断环节:与开关量报警单元功能相同。
第10章船舶机舱监视与报警系统
二、用继电器组成的报警控制单元
以继电器为基本元件,组成报警电路。 以SMA一02型报警控制单元为例: 1.报警控制
第10章船舶机舱监视与报警系统
机舱第监10视章船报舶警机舱系监统视与组报成警系统
监测第点10章报船警舶机处舱理监视流与程报警系统
第10章船舶机舱监视与报警系统
第10章船舶机舱监视与报警系统
返回
第二节 报警控制单元及报警的延伸 采用连续监视方法的监视与报警系统中,每一个监测点均需要一
个独立的监视与报警控制单元,整个监视与报警系统是由各个 检测点的报警控制单元组合而成的,因此称为单元组合式监视 与报警系统。 在单元组合式集中监视与报警系统中,报警控制单元是监视报警 系统的核心部分,由它来控制参数和故障报警。
第10章船舶机舱监视与报警系统
一、DC C20监视与报警系统的结构组成
(二)远程操作站(ROS) ROS(Remote Operator Station)由PC机、操作控制面板 OCP(或普通PC机键盘)、鼠标、显示屏和打印机组成, PC机采用Windows NT或Windows XP操作系统。ROS通常 设置在集控室、驾驶室和甲板舱室。各ROS均配置双网卡, 形成双冗余的Ethernet网络。 集控室的2台ROS还兼有系统网关SGW(System Gate Way) 的功能,使得局域网中的各个ROS能够通过系统网关SGW与 CAN总线相连。通过SGW和CAN总线,ROS一方面可以接受 各个DPU单元送出的机舱现场信息,另一方面还能向DPU发 送操作指令、控制参数和程序包。
海船船员知识更新—机舱网络化监控

船舶轮机新技术
4.开关量输入模块(RDi-32、RDi-32A,Remote Digital Input):32通道开关量输入模块,RDi-32为触 点输入,RDi-32A为24VAC或24VDC电压信号输入。 由发光二极管(LED)指示每个输入通道状态。适 用于检测设备运行状态、阀门位置等
船舶轮机新技术
4.开关量输入模块(RDi-32、RDi-32A,Remote Digital Input):32通道开关量输入模块,RDi-32为触 点输入,RDi-32A为24VAC或24VDC电压信号输入。 由发光二极管(LED)指示每个输入通道状态。适 用于检测设备运行状态、阀门位置等
分布式网络结构:对和控制,各个计算机采用现 场总线传输数据,各个计算机形成现场总线网络。现场 总线网络与PC机组成的以太网互联,由以太网执行上层 管理任务
船舶轮机新技术
数据通信:把计算机信息和数据转变成物理信号,通过 介质传送到接收端,再将物理信号还原成需要的信息和 数据。
总线结构:采用通信总线将网络节点连接起来,节点通过通 信总线进行数据传输,使用广播式传输技术,同一时间只允 许一个节点发送数据,总线上其他节点根据发送内容中携带 的目的地址决定是否对该数据进行接收
环形结构:各个网络节点通过环接口连在一条首尾相接的闭 合环形通信线路中,各节点间无主从关系,信息流在网络中 沿环单向传递
船舶轮机新技术
(三)值班呼叫系统(WCS-Watch Calling System): 位置:驾驶台,轮机员房间,公共场所
驾驶台延伸报警称为:WBU,watch bridge unit 轮机员房间,公共场所称为:WCU,watch calling unit 上述延伸报警通过CAN总线与ROS相连称为值 班呼叫系统.