电磁组-德州学院白杨-M技术报告
小型电磁发射模型的设计及线圈参数寻优

14
0103429
01
16
01028997
0108
16
01021327
0104
18
01021531
0108
18
01017322
0104
20
01023218
0108
20
01015664
0106
2
01000489
011
2
01000894
0106
4
01001153
011
4
01003753
电阻值等等 ,但是这些因素在整个设计过程中可以归结为初始
条件 ,已经是确定值 ,不在我们的寻优过程考虑范围中 。控制过
程对初始环境的寻优 ,围绕在如下主要因素 l 、n、x 的有限取值
区域中进行 。
线圈长度 线圈 能量转化率 线圈长度 线圈 能量转化率
(m)
层数
均值
(m)
层数
均值
0104
2
01001199
《自动化技术与应用》2006 年第 25 卷第 4 期
工业控制与应用
Industry Control and Applications
3 发射模型结构设计
本文所设计的发射模型由固定线圈 、发射管 、抛体 、电容 、检 测装置构成 。它由储能电容供电 。发射模型的尺寸为 :炮管外 径为 11210cm ,内径为 01986cm ,壁厚为 01112cm ,抛体为磁性材 料 (钢) ,长 81320cm ,重 361551g ,线圈长度分别为 4cm ,6cm ,8cm , 10cm。本实验要用这四种长度的线圈发射抛体 ,并且每种线圈 都要在 400v - 1200v 之间的各种电压下发射抛体 。
GaN 器件的高效率高功率密度LLC 谐振变换器的优化设计

DENG Xiao⁃xiang,LIU Yu,ZHAG Wei⁃jie
(College of Electrical and Control Engineering, Heilongjiang University of Science and Technology, Harbin 150022, China)
器 件 ,可 以 在 较 高 的 开 关 频 率 下 提 高 电 路 的 效 率 和 功 率 密 度 。 在 分 析 LLC 谐 振 变 换 器 的 开 关 过 程 和 建 模 的 基 础
上,利用 LTspice 仿真软件对 LLC 谐振网络参数进行仿真分析,优化了原边开关器件死区时间,改进了谐振参数设
实验平台对样机进行实验验证,实验结果表明,样机达到了高效率、高功率密度的目标要求。
1
LLC 谐振变换器的特性与工作过程分析
对称半桥 LLC 谐振变换器是将串联谐振电容拆分成两个等容量谐振电容串接在电路中。相对于非对
称 半 桥 结 构 谐 振 变 换 器 ,改 进 的 对 称 半 桥 结 构 变 换 器 的 谐 振 电 流 纹 波 有 明 显 改 善 ,谐 振 腔 电 流 波 形 更 接 近
果表明采用 GaN 器件作为谐振变换器开关器件,相较文献[9-10]中采用传统 Si 器件整机开关,前者的频率
和 效 率 明 显 提 高 ,且 样 机 体 积 明 显 减 小 。 文 献[4]和 文 献[7]基 于 GaN 器 件 非 对 称 半 桥 LLC 谐 振 变 换 器 后
级整流电路使用同步整流技术,整机效率相对于不控整流电路效率有显著提升。
imental results verify the feasibility of the scheme design.
电子束实验实验报告
一、实验目的1. 了解示波管的结构和原理。
2. 研究电子束在电场和磁场中的偏转规律。
3. 掌握电子束聚焦的原理和方法。
4. 培养实验操作能力和数据处理能力。
二、实验仪器与设备1. 电子束实验仪2. 直流稳压电源3. 数字多用表4. 示波器5. 电子枪6. 偏转电极7. 磁场发生器三、实验原理1. 示波管结构:示波管是一种真空电子管,主要包括电子枪、偏转系统、荧光屏和加速系统。
电子枪产生电子束,偏转系统控制电子束的偏转方向,荧光屏显示电子束的运动轨迹。
2. 电子束偏转:电子束在电场和磁场中受到力的作用,会发生偏转。
根据洛伦兹力公式,电子束在电场中的偏转距离为:\(D = \frac{qEL}{2m}\)其中,\(q\) 为电子电荷,\(E\) 为电场强度,\(L\) 为偏转电极长度,\(m\) 为电子质量。
3. 电子束聚焦:电子束在非均匀电场或磁场中会发生聚焦。
通过调节电极电压或磁场强度,可以使电子束聚焦到一点。
四、实验步骤1. 连接实验仪器,检查各部件是否正常。
2. 调节电子枪的加速电压,使电子束能够穿过偏转电极。
3. 调节偏转电极的电压,观察电子束在电场中的偏转情况。
4. 调节磁场发生器的磁场强度,观察电子束在磁场中的偏转情况。
5. 调节聚焦电极的电压,观察电子束的聚焦情况。
6. 测量电子束的偏转距离和聚焦点,记录实验数据。
五、实验结果与分析1. 电子束在电场中的偏转距离与偏转电极电压的关系:根据实验数据,绘制电子束偏转距离与偏转电极电压的图像,分析两者之间的关系。
2. 电子束在磁场中的偏转距离与磁场强度的关系:根据实验数据,绘制电子束偏转距离与磁场强度的图像,分析两者之间的关系。
3. 电子束聚焦效果:根据实验数据,分析聚焦电极电压对电子束聚焦效果的影响。
六、实验结论1. 电子束在电场和磁场中会发生偏转,偏转距离与偏转电压和磁场强度有关。
2. 通过调节电极电压和磁场强度,可以使电子束聚焦到一点。
德州学院生物物理省级重点实验室在单晶石墨烯超痕量生物传感技术

身晶体结构缺 陷及分 子探针 偶联对石墨烯本征
结构破坏 等 因素 的影响 ,导致 石墨烯生 物传感
技术难 以用 于动 力学及亲和力方面 的检测 。 近 年来 ,许 士才博士 、王吉华教授 和周耀旗教授 带领科研 团队围绕单 晶石 墨烯超 痕量生物传感 技
术 开展 了深入 研究 ,在 石墨烯生物 传感器用 于动力学及亲 和力方面取得 了重大进展 ,创造 性地采用厘 米级 单 晶石 墨烯 作为导 电沟道研制 出单 晶石墨烯超 痕量生物传感 器 ,并巧 妙地 运用非共价 偶联探 针的 方式 避免 了探针 分子对石 墨烯本征结构 的破坏 ,从而推动可靠石 墨烯生物传 感技术迈 出了关键 一步 。 在此基础 上 ,首次采 用多通道单 晶石墨烯 超 痕量生物 传感器将 分子相互作用直 接 以 a
的研 究对 象 ,对于 发现生物 学中相互作用 的新规律 ,推动动力学分析 检测方法在更广 阔领域 的应用具
有重要意义 。
该技术经过 产业化后 可进 入与经济 社会发展 紧密相关 的诸 多产业 ,市场前景 巨大。例如 :在新药 研制 中,基于单 晶石 墨烯超痕量生 物传感器 ,可开发 一种 新型制药 设备 ,组建高通量 药物筛选平 台, 通 过对药物 分子及 其靶 向受体 的亲和力排序 ,进行药物 筛选和药物剂 量确定 ,显著提 高筛选效率 ,降 低 筛选成本 。同时 ,基 于该传感器超 高的检测灵敏度 ,经过对单
集成 电路兼容 、易于 小型化、成本 低及 易于实
现高通量检测等 突出优 点。 由于常规石 墨烯 自
( a ) 厘米级石墨烯单 晶 ;
( b ) 多通道单 晶石墨烯超痕 量生 物芯 片 ( c ) 传感机制 : D N A 结合引发石墨烯表面电场变化 以电信号 变化直接呈现D NA 相 互作用过程
【推荐】电子束实验报告-范文word版 (10页)

本文部分内容来自网络整理,本司不为其真实性负责,如有异议或侵权请及时联系,本司将立即删除!== 本文为word格式,下载后可方便编辑和修改! ==电子束实验报告篇一:实验九、电子束的偏转605舍:海霞,晓珍,春云,文静实验九、电子束的偏转实验时间:201X.11 . 25篇二:电子束的偏转实验报告实验题目:电子束线的偏转实验目的1. 研究带电粒子在电场和磁场中偏转的规律;2. 了解电子束管的结构和原理。
仪器和用具实验原理1.电子束在电场中的偏转假定由阴极发射出的电子其平均初速近似为零,在阳极电压作用下,沿z方向作加速运动,则其最后速度vz可根据功能原理求出来,即eUA?移项后得到 vz?212mvz 22eUA(C.11.1) me式中UA为加速阳极相对于阴极的电势,为电子的电荷与质量之比(简称比荷,又称荷m质比).如果在垂直于z轴的y方向上设置一个匀强电场,那么以vz速度飞行的电子将在y方向上发生偏转,如图C.11.l所示.若偏转电场由一个平行板电容器构成,板间距离为d,极间电势差为U,则电子在电容器中所受到的偏转力为Fy?eE?eU(C.11.2) d??根据牛顿定律 Fy?m?y??因此 ?yeUdeU(C.11.3) md即电子在电容器的y方向上作匀加速运动,而在z方向上作匀速运动,电子横越电容器的时间为 t?l(C.11.4) vz当电子飞出电容器后,由于受到的合外力近似为零,于是电子几乎作匀速直线运动,一直打到荧光屏上,如图C.11.l里的F点.整理以上各式可得到电子偏离z轴的距离N?KEU(C.11.5) UALl?l?1??? 2d?2L?式中KE?是一个与偏转系统的几何尺寸有关的常量.所以电场偏转的特点是:电子束线偏离z轴(即荧光屏中心)的距离与偏转板两端的电压成正比,与加速极的加速电压成反比.2.电子束在磁场中的偏转如果在垂直于z轴的x方向上设置一个由亥姆霍兹线圈所产生的恒定均匀磁场,那么以速度vz飞越的电子在y方向上也将发生偏转,如图C.11.2所示.假定使电子偏转的磁场在l范围内均匀分布,则电子受到的洛伦兹力大小不变,方向与速度垂直,因而电子作匀速圆周运动,洛伦兹力就是向心力,所以电子旋转的半径R?mvz(C.11.6) eB当电子飞到A点时将沿着切线方向飞出,直射荧光屏,由于磁场由亥姆霍兹线圈产生,因此磁场强度B?kI (C.11.7)式中k是与线圈半径等有关的常量,I为通过线圈的电流值.将(C.11.1)、(C.11.7)式代人(C.11.6)式,再根据图C.11.2的几何关系加以整理和化简,可得到电于偏离z轴的距离N?KMI(C.11.8) ALlk?l?e1? ??2?2L?m式中KM?也是一个与偏转系统几何尺寸有关的常量.所以磁场偏转的特点是:电子束的偏转距离与加速电压的平方根成反比,与偏转电流成正比.1 2 3 22电子管内部线路图实验内容1、研究和验证示波管中电场偏转的规律。
飞思卡尔智能车电磁组分区算法介绍
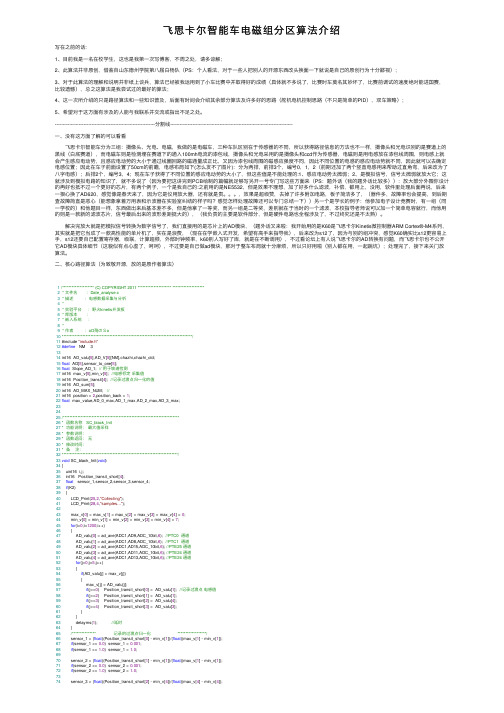
飞思卡尔智能车电磁组分区算法介绍写在之前的话:1、⽬前我是⼀名在校学⽣,这也是我第⼀次写博客,不周之处,请多谅解;2、此算法并⾮原创,借鉴⾃⼭东德州学院第⼋届⽩杨队(PS:个⼈看法,对于⼀些⼈把别⼈的开源东西改头换⾯⼀下就说是⾃⼰的原创⾏为⼗分鄙视);3、对于此算法的理解和说明并⾮纸上谈兵,算法已经被我运⽤到了⼩车⽐赛中并取得好的成绩(具体就不多说了,⽐赛时车莫名其妙坏了,⽐赛前调试的速度绝对能进国赛,⽐较遗憾),总之这算法是我尝试过的最好的算法;4、这⼀次所介绍的只是路径算法和⼀些知识普及,后⾯有时间会介绍其余部分算法及许多好的思路(舵机电机控制思路(不只是简单的PID),双车策略);5、希望对于这⽅⾯有涉及的⼈能与我联系并交流或指出不⾜之处。
---------------------------------------------------------------分割线-----------------------------------------------------------------------------⼀、没有这⽅⾯了解的可以看看 飞思卡尔智能车分为三组:摄像头、光电、电磁,我做的是电磁车,三种车队区别在于传感器的不同,所以获得路径信息的⽅法也不⼀样,摄像头和光电识别的是赛道上的⿊线(⽩底赛道),⽽电磁车则是检测埋在赛道下的通⼊100mh电流的漆包线,摄像头和光电采⽤的是摄像头和ccd作为传感器,电磁则是⽤电感放在漆包线周围,则电感上就会产⽣感应电动势,且感应电动势的⼤⼩于通过线圈回路的磁通量成正⽐,⼜因为漆包线周围的磁感应强度不同,因此不同位置的电感的感应电动势就不同,因此就可以去确定电感位置;因此在车⼦前⾯设置了50cm的前瞻,电感布局如下(怎么发不了图⽚):分为两排,前排3个,编号0,1,2(前期还加了两个竖直电感⽤来帮助过直⾓弯,后来改为了⼋字电感);后排2个,编号3,4;现在车⼦获得了不同位置的感应电动势的⼤⼩了,但这些值是不能处理的:1、感应电动势太微弱;2、是模拟信号,信号太微弱就放⼤它;这就涉及到模拟电路的知识了,就不多说了(因为要把这讲完到PCB绘制的篇幅就⾜够写另开⼀号专门写这些⽅⾯来(PS:题外话(我的题外话⽐较多)):放⼤部分外围你设计的再好也抵不过⼀个更好的芯⽚,有两个例⼦,⼀个是我⾃⼰的:之前⽤的是NE5532,但是效果不理想,加了好多什么滤波,补偿,都⽤上,没⽤,软件⾥处理后⾯再说,后来⼀狠⼼换了AD620,感觉像是春天来了,因为它是仪⽤放⼤器,还有就是贵。
电磁频谱工程实验报告

一、实验目的1. 了解电磁频谱的基本概念及其在通信、雷达、导航等领域的应用。
2. 掌握电磁频谱分析仪的使用方法,能够对电磁信号进行频谱分析。
3. 通过实验,验证电磁波传播特性,并探究不同频率信号在传播过程中的衰减规律。
4. 培养实验操作技能和数据分析能力。
二、实验仪器与设备1. 电磁频谱分析仪2. 发射器3. 接收器4. 信号发生器5. 同轴电缆6. 测量仪器(示波器、万用表等)三、实验原理电磁频谱是指从无线电波到伽马射线的整个电磁波谱。
本实验通过电磁频谱分析仪对电磁信号进行频谱分析,探究不同频率信号在传播过程中的衰减规律。
四、实验内容与步骤1. 频谱分析仪设置(1)开启电磁频谱分析仪,调整扫描范围、分辨率等参数,确保仪器正常工作。
(2)将信号发生器输出的标准信号输入频谱分析仪,调整频谱分析仪的设置,使信号显示清晰。
2. 信号发射与接收(1)将发射器放置在实验室内,接收器放置在距离发射器一定距离的位置。
(2)调整发射器的频率,观察接收器接收到的信号强度,记录不同频率下的信号强度。
3. 信号衰减实验(1)将发射器与接收器之间放置不同长度的同轴电缆,观察信号强度随电缆长度增加的变化。
(2)调整发射器的功率,观察接收器接收到的信号强度随功率变化的情况。
4. 数据分析(1)绘制不同频率信号强度随电缆长度变化的曲线,分析信号衰减规律。
(2)绘制不同功率下信号强度随电缆长度变化的曲线,分析功率对信号衰减的影响。
五、实验结果与分析1. 信号衰减规律实验结果显示,随着电缆长度的增加,信号强度逐渐减弱,且衰减速度与频率有关。
频率越高,衰减越快。
2. 功率对信号衰减的影响实验结果显示,随着发射器功率的增加,接收器接收到的信号强度也随之增加。
但在功率较高时,信号强度增长速度变慢。
六、实验结论1. 电磁波在传播过程中会发生衰减,且衰减速度与频率、功率等因素有关。
2. 频谱分析仪是一种有效的电磁信号分析工具,可用于研究电磁波传播特性。
内置式永磁同步电机不同转子拓扑结
第27卷㊀第1期2023年1月㊀电㊀机㊀与㊀控㊀制㊀学㊀报Electri c ㊀Machines ㊀and ㊀Control㊀Vol.27No.1Jan.2023㊀㊀㊀㊀㊀㊀内置式永磁同步电机不同转子拓扑结构的电磁性能及电磁振动噪声分析谢颖,㊀辛尉,㊀蔡蔚,㊀范伊杰(哈尔滨理工大学电气与电子工程学院,黑龙江哈尔滨150080)摘㊀要:为了研究转子拓扑结构对内置式永磁同步电机(IPMSM )电磁性能以及电磁振动噪声的影响,以8极48槽永磁同步电机为例,根据设计指标,分别建立单层和双层永磁体两种内置式转子的永磁同步电机有限元模型,两个模型在定子㊁绕组㊁永磁体用量及轴向长度上完全一致㊂首先,从磁路结构的角度分析交直轴电感的区别,并分别对电机的交直轴电感参数㊁转矩波动㊁空载反电势及其谐波含量和输出外特性进行有限元分析比较㊂其次,根据麦克斯韦张量法推导出径向电磁力密度的解析表达式,并分别将两台电机的气隙磁密和径向电磁力密度及经过傅里叶分解后的谐波含量进行分析比较㊂最后,建立电机的三维有限元模型,计算定子铁心和定子组件径向模态的振型及固有频率,并对两台电机的电磁振动噪声特性进行仿真分析比较㊂结果表明,对于内置式永磁同步电机,在永磁体用量相同的情况下,双层永磁体比单层永磁体的转子结构具有更加良好的电磁特性及电磁振动噪声表现㊂关键词:内置式永磁同步电机;电磁性能;径向电磁力密度;模态分析;电磁振动噪声;有限元法DOI :10.15938/j.emc.2023.01.011中图分类号:TM351文献标志码:A文章编号:1007-449X(2023)01-0110-10㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀收稿日期:2022-04-11基金项目:国家自然科学基金(U21A20145);国家自然科学基金(51977052);黑龙江省自然科学基金重点项目(ZD2022E006)作者简介:谢㊀颖(1974 ),女,博士,教授,博士生导师,研究方向为电机内综合物理场计算㊁新能源汽车用电机设计及多目标优化;辛㊀尉(1997 ),男,硕士研究生,研究方向为永磁同步电机的设计与优化;蔡㊀蔚(1959 ),男,博士,教授,博士生导师,研究方向为驱动电机㊁功率电子控制器及汽车电动化电驱动系统㊁低振动噪声电机等;范伊杰(1996 ),男,硕士研究生,研究方向为永磁同步电机的设计与优化㊂通信作者:谢㊀颖Electromagnetic performance and electromagnetic vibration noise analysis of different rotor topologies of interior permanent magnetsynchronous motorXIE Ying,㊀XIN Wei,㊀CAI Wei,㊀FAN Yi-jie(School of Electrical and Electronic Engineering,Harbin University of Science and Technology,Harbin 150080,China)Abstract :To study the effect of rotor topology on the electromagnetic performance and electromagnetic vi-bration and noise of the interior permanent magnet synchronous motor (IPMSM),an IPMSM with 48slots and 8poles was modelled.Based on the design requirements,the finite-element models of the two IPMSMs with single-layer and double-layer permanent magnets were established.The two models were analyzed with the same stator,winding,amount of permanent magnet and axial length.Firstly,the differ-ence of the d-axis and q-axis inductance was analyzed from the angle of the magnetic circuit structure,and the parameters of the d-axis and q-axis inductance,the torque ripple,the no-load back electromotiveforce,its harmonic content and the output characteristics of the motor were compared by the finite ele-ment analysis.Secondly,the analytical expression of radial electromagnetic force density was deduced based on maxwell tensor method,and the air-gap flux density,radial electromagnetic force density and the harmonic content after Fourier decomposition of the two motors were analyzed and compared.Finally, the3D finite-element model of the motor was established,and the radial mode of vibration and natural frequency about stator core and stator assembly were calculated.Then the electromagnetic vibration noise characteristics of the two motors were simulated and compared.The results show that for the IPMSM, when the amount of permanent magnet is the same,the rotor structure of double-layer permanent magnet has better electromagnetic characteristics and electromagnetic vibration noise performance than that of sin-gle-layer permanent magnet.Keywords:interior permanent magnet motor;electromagnetic performance;radial electromagnetic force density;modal analysis;electromagnetic vibration noise;finite-element method0㊀引㊀言内置式永磁同步电机由于其宽广的调速范围㊁宽高效区及高功率密度等特点被广泛地应用于电动汽车㊁航空航天等领域[1]㊂由于电动汽车用驱动电机需要有较强的过载能力和较宽的调速范围,所以对电机的电磁性能具有较高的要求,同时随着用户对乘坐的体验要求越来越高,对电动汽车用驱动电机的噪声㊁振动和声振粗糙度(noise,vibration and harshness,NVH)性能的要求也更加严格[2-3]㊂因此,针对电动汽车用内置式永磁同步电机的电磁性能及电磁振动噪声的研究具有重要意义和应用价值㊂根据永磁体在转子上的位置不同,永磁同步电机可以分为表贴式㊁内置式和爪极式3种结构,其中,内置式永磁同步电机应用最为广泛㊂内置式永磁同步电机可以利用由交直轴电感之间的差值产生的磁阻转矩提高电机的负载性能和转矩密度,由于这一良好特性,内置式永磁同步电机已成为汽车驱动电机的主要选择㊂转子永磁体不同的形状和位置可以组合成多种磁路结构,转子磁路结构的不同也会对电机的性能产生差异[4]㊂文献[5]采用遗传算法针对一台30kW电动汽车用内置式永磁同步电机的5种不同转子拓扑结构进行优化设计,分别对比分析了5种不同结构的转矩特性㊁弱磁性能及效率分布等性能,总结了各自结构的特点及适用场所㊂文献[6]针对传统三层结构转子结构复杂难加工的问题,提出一种∇+U型的三层转子结构,该结构相比于传统的单层和双层结构可以有效地降低气隙磁密谐波含量㊁转矩脉动及高速弱磁时的铁心损耗,提高电机的弱磁性能及运行效率㊂电机的振动噪声是一个涉及电磁㊁结构㊁力学和声场等多个领域的复杂多物理场问题㊂目前,永磁同步电机电磁振动噪声的抑制是国内外学者研究的热点问题之一㊂文献[7]以44极48槽永磁同步电机为例,分析了作用在定子齿上的电磁激振力的分布特点及作用机理,推导了气隙磁通密度在定子齿削角条件下的表达式,提出基于定子齿削角的振动噪声削弱方法㊂文献[8]通过对内置式永磁同步电机转子隔磁桥进行优化进而改变定子齿部的径向电磁力,降低电机的振动噪声,借助有限元软件分析比较优化前后电机的电磁振动噪声特性,并通过实验进行验证㊂文献[9]提出一种能够在考虑槽型尺寸对气隙磁导影响的条件下快速准确计算电磁激振力波的方法,并总结出能够快速预测定子周向模态对应固有频率的定子铁心等效方法㊂文献[10-11]推导了永磁同步电机在转子分段斜极后的径向电磁力波解析式,并分析了转子分段斜极对永磁同步电机电磁振动噪声的抑制机理㊂上述对电磁振动噪声的削弱方法主要基于对电机的几何结构进行优化,其他方法则主要关注电流激励对电磁振动噪声的影响㊂文献[12]分析了逆变器运行过程中产生的电流谐波对电磁噪声的影响㊂文献[13]提出在适当的直轴电流下可以降低30%的径向力脉动㊂文献[14]研究了在不同供电电流下的振动和噪声,并通过由电流谐波引起的最低空间阶力波的振幅变化解释了噪声和振动峰值的变化特点㊂为分析比较转子拓扑结构对内置式永磁同步电机性能的影响,本文以8极48槽67.5kW的电动汽车用内置式永磁同步电机为研究对象,在保证永磁体用量完全相同的情况下分别建立单层和双层永磁体两种内置式转子的永磁同步电机有限元模型㊂利111第1期谢㊀颖等:内置式永磁同步电机不同转子拓扑结构的电磁性能及电磁振动噪声分析用有限元软件对比分析两台电机的交直轴电感参数㊁转矩输出稳定性㊁空载反电势谐波畸变率㊁输出外特性㊁气隙磁密及径向电磁力密度,并对电机定子进行模态分析,最后计算出电机的电磁振动噪声特性,比较单层内置式转子和双层内置式转子的电磁振动噪声性能㊂1㊀模型建立与性能分析1.1㊀设计指标电机的设计指标及设计后的几何尺寸如表1所示,本文根据电机性能参数要求建立的两台内置式永磁同步电机模型横截面图如图1所示,硅钢片材料采用B30AHV1500,永磁体材料采用N48UH,两台电机的永磁体用量㊁转子斜极方案㊁铁心轴向长度相同且共用一套定子和绕组,并针对转子辅助槽㊁隔磁桥及极弧系数完成了电机性能改进设计,图1(a)为单层内置式V型永磁同步电机模型图,图1(b)为双层内置式V+1型永磁同步电机模型图㊂表1㊀永磁同步电机设计指标及几何尺寸Table1㊀Design index and geometric dimension of perma-nent magnet synchronous motor图1㊀电机模型横截面图Fig.1㊀Cross section of motor model1.2㊀交直轴电感参数分析图2为V+1型结构电机的交直轴定义图,V型结构的定义与之相同,其中,d轴为直轴,q轴为交轴㊂可以看出,直轴磁路相比于交轴磁路需要穿过更多的永磁体,因此,直轴磁路上的磁阻较大,交轴磁路的磁阻较小,交轴电感大于直轴电感㊂图2㊀交直轴定义图Fig.2㊀Definition diagram of d-axis and q-axis永磁同步电机在d-q轴旋转坐标系下,交㊁直轴的磁链方程和转矩方程[15]分别为:ψd=L d i d+ψf;ψq=L q i q㊂}(1)㊀T e=32p(ψd i q-ψq i d)=32p[ψf i q-(L q-L d)i d i q]=T m+T r㊂(2)式中:ψd㊁ψq分别为定子磁链d㊁q轴分量;i d㊁i q分别为定子电流d㊁q轴分量;L d㊁L q分别为电感的d㊁q轴分量;ψf为转子永磁体磁链;T e㊁T m㊁T r分别为电机的电磁转矩㊁永磁转矩以及磁阻转矩㊂由式(1)可以得到永磁磁链和交㊁直轴电感表达式为:ψf=ψd-L d i d;(3)L d=ψd-ψfi d;L q=ψq iq㊂üþýïïïï(4)内置式永磁同步电机电磁转矩由永磁转矩和磁阻转矩两部分组成,交直轴电感之间的差值越大,磁阻转矩在电磁转矩中的占比就越大,电机的弱磁扩速性能也会越好[16-17]㊂为研究磁路结构对电感参数的影响,对两台电机分别施加相同的激励源,在考虑饱和及交直轴之间的交叉耦合影响的情况下,两台电机的交直轴电感参数随交直轴电流的变化情况如图3所示㊂根据仿真结果分析得出,由于磁路结构的不同,两台电机在空载及负载工况下交直轴磁路的磁阻不同,会使得两台电机的交直轴电感随之不同㊂随着交直轴电流的逐渐增大,电机内交直轴磁路的饱和211电㊀机㊀与㊀控㊀制㊀学㊀报㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第27卷㊀程度逐渐增大,交直轴电感逐渐减小㊂图3㊀交直轴电感参数Fig.3㊀Parameters of d-axis and q-axis inductance永磁同步电机的凸极率可以用q 轴电感和d 轴电感表示为ε=L qL d㊂(5)两台电机的交直轴电感及凸极率的最大值和最小值如表2所示,分析得出,电机在不同工况下的凸极率也是不同的㊂由式(5)可知,由于两台电机在交直轴电感数值上存在不同,所以凸极率上也存在差异,V +1电机的凸极率相对较高,可以产生更大的磁阻转矩㊂表2㊀电感及凸极率的最大值和最小值Table 2㊀Maximum and minimum values of inductanceand convexity参数最值V 型V +1型q 轴电感/μH 最大值209222最小值7468d 轴电感/μH 最大值8697最小值5550凸极率最大值 2.49 3.26最小值1.341.361.3㊀输出性能分析在电动汽车运行过程中,如果驱动电机产生较大的转矩波动会带来噪声和振动,影响乘客使用中的舒适度,所以在设计电动汽车用内置式永磁同步电机的过程中通常追求较小的转矩波动,转矩波动[6]可表示为T ripple =T max -T minT avgˑ100%㊂(6)图4为两台电机在额定工况下的转矩波形图,V 型电机平均转矩为137.89N ㊃m,转矩波动4.86%,V +1型电机平均转矩为137.90N㊃m,转矩波动2.8%㊂两者在平均转矩接近的情况下,V +1型电机转矩波动低于V 型电机42%,电机转矩输出性能更加稳定㊂图4㊀额定工况下转矩波形对比Fig.4㊀Comparison of torque waveform under ratedworking condition311第1期谢㊀颖等:内置式永磁同步电机不同转子拓扑结构的电磁性能及电磁振动噪声分析图5为两台电机在一个周期内的A 相空载反电势波形图及其快速傅里叶变化(fast Fourier trans-form,FFT)分解结果图,V +1型电机的17㊁21及23次谐波幅值略高于V 型电机,但由于其阶次较高且幅值很小,故可忽略,其余各阶次谐波幅值均低于V 型电机㊂谐波畸变率可表示为THD =(U nrms /U 1rms )ˑ100%㊂(7)式中:THD 为谐波畸变率;U nrms 为谐波含量的均方根值;U 1rms 为基波的均方根值㊂根据式(7)计算得到,V 型电机的谐波畸变率为5.59%,V +1型电机的谐波畸变率为3.2%㊂由此可知,V +1型电机空载反电势波形正弦度更高,有利于电机稳定运行[18]㊂图5㊀A 相空载反电势及谐波含量分析Fig.5㊀Analysis of no-load back electromotive force andharmonic content of phase A内置式永磁同步电机在转折速度以下常采用最大转矩电流比控制方法,该方法可以使电机输出相同转矩时所需的定子电流最小,减小电机的铜耗㊂随着转速的提升,电机的端电压达到极限,此时需要增加定子电流的直轴去磁分量来保持高速运行时电压方程的平衡,因此,转折速度以上常采用弱磁控制方式提高内置式永磁同步电机的带载能力[19]㊂两台电机的外特性输出曲线如图6所示,可以看出,在转速0~10000r /min 运行区间,V +1型电机产生的转矩和功率略高于V 型电机㊂在恒转矩运行阶段,V 型电机转折速度为4720r /min,V +1型电机转折速度为4900r /min㊂与V 型电机相比,V +1型电机转折速度相对提高3.67%,且在高于转折速度进入恒功率运行阶段后,电机的功率外特性较为平缓,弱磁扩速能力较强㊂图6㊀输出外特性Fig.6㊀Output external characteristics2㊀径向电磁力分析电磁振动噪声是电机运行过程中产生的振动噪声的主要组成部分,气隙磁场产生的径向电磁力作用在电机定子铁心上引起振动,从而将振动传递给电机结构,并将噪声辐射到空气中[20-21]㊂因此,对电机径向电磁力的研究是分析电机电磁振动噪声的关键㊂由于空气的磁导率远小于铁磁材料的磁导率,故在计算径向电磁力密度时可忽略切向气隙磁通密度㊂根据麦克斯韦张量法,作用在电机定子铁心上的径向电磁力密度[22]可表示为f r =12μ0(B 2r -B 2t )ʈB 2r 2μ0㊂(8)式中:f r 为径向电磁力密度;B r 为径向气隙磁通密度;B t 为切向气隙磁通密度;μ0为真空磁导率㊂电机气隙处的磁场主要由永磁体谐波磁场和定子电枢反应谐波磁场两者共同作用产生,因此,式(8)可表示为f r =12μ0(B R σ+B S σ)2=12μ0(B 2R σ+B 2S σ)+1μ0B R σB S σ=12μ0(F 2R Λ2σ+F 2S Λ2σ)+1μ0F R F S Λ2σ㊂(9)411电㊀机㊀与㊀控㊀制㊀学㊀报㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第27卷㊀式中:B R σ为永磁体谐波磁场在气隙处产生的磁通密度;B S σ为定子电枢反应谐波磁场在气隙处产生的磁通密度;F R 为永磁磁场气隙磁动势;F S 为定子电枢反应磁动势;Λσ为考虑定子开槽影响时的等效气隙磁导㊂Λσ的表达式[23]为Λσ=Λ0+ðk =1,2,3,Λk cos(kZθ)㊂(10)式中:Λσ为平均气隙磁导;Λk 为开槽产生的k 次谐波磁导的幅值;Z 为定子槽数;θ为转子机械角度㊂根据式(9)可知,气隙磁通密度B R σ与B S σ的大小决定了径向电磁力密度的大小㊂通过有限元仿真得到两台电机的气隙磁密波形及其傅里叶分解频谱图如图7所示,分析得出,两台电机基波幅值相差不大,与V 型电机相比,V +1型电机除21和23次谐波略有增长外,其余阶次谐波含量均有不同程度的下降,气隙磁密波形正弦度更佳㊂图7㊀气隙磁密及谐波含量分析Fig.7㊀Analysis of air gap magnetic density andharmonic content两台电机的径向电磁力密度三维波形及其二维傅里叶分解频谱图如图8所示,其中(A ,Bf )指径向电磁力密度的谐波分量,其空间谐波阶次为A ,时间谐波阶次为B ,f 为通入定子三相电流的基波频率㊂图8㊀径向电磁力密度及谐波含量分析Fig.8㊀Analysis of radial electromagnetic force densityand harmonic content511第1期谢㊀颖等:内置式永磁同步电机不同转子拓扑结构的电磁性能及电磁振动噪声分析径向电磁力密度的幅值与作用在定子上的径向电磁力引起的电磁振动大小成正比,且其空间阶数的四次方与定子铁心的变形程度成反比,所以,空间阶数越高对电磁振动的贡献越小[3],对于本文中的电机可以仅考虑空间阶数rɤ8的径向电磁力密度分量㊂分析得出,径向电磁力密度谐波的空间分量均为极数的整数倍,时间分量均为电频率的整数倍,其中(0,0f)的谐波幅值最大,但因为其关于时间和空间均不变的静态力,所以对电机的电磁振动噪声不会产生影响,可以忽略㊂两台电机的径向电磁力密度经过傅里叶分解后的谐波含量如表3所示,与V型电机相比,V+1型电机(16,4f)的谐波幅值略有增加,其余径向电磁力的各阶次谐波幅值均有所降低㊂表3㊀径向电磁力密度谐波含量对比Table3㊀Comparison of radial electromagnetic force densi-ty and harmonic content阶次径向电磁力密度/(N㊃m-2)ˑ105 V型V+1型(0,0f) 3.08696 3.03805(8,2f) 2.66628 2.20976(16,4f) 1.66524 1.76536(24,6f)0.864510.80144(32,8f)0.576380.36873(48,0f) 1.31498 1.30509(48,12f)0.475770.38607(-48,0f) 1.31498 1.305093㊀模态分析当径向电磁力密度谐波的频率与电机定子的固有频率接近或者相同时会使定子发生共振,此时会引起较为严重的振动响应[24]㊂因此,模态分析是研究电机电磁振动噪声的关键步骤,通过模态分析可以清楚地了解电机定子结构各阶模态振型及其固有频率,分析电机发生共振的可能性㊂本文利用有限元采用自由模态计算方法对电机定子铁心的模态进行求解,忽略模型轴向形变的模态振型,通过计算得到的电机定子铁心和包含机壳的定子组件的各阶模态振型及固有频率如表4所示㊂根据表4分析得知,增添机壳的定子铁心即定子组件,相较于单定子铁心结构,同阶振型的固有频率得到提升,且随着模态阶次的升高,提升幅值随之增加,可以据此特性减少发生共振的可能性㊂表4㊀定子模态振型及固有频率Table4㊀Modal shape and natural frequency of stator 阶次模态振型及固有频率定子铁心定子组件阶2阶3阶4阶5阶4㊀电磁振动噪声分析为分析内置式永磁同步电机转子拓扑结构对电机电磁振动噪声的影响,以本文所提出的两台电机为例,分别建立多物理场耦合仿真模型,将上文通过电磁有限元仿真计算获得的电机定子齿部的径向电磁力作为激励源映射到结构场三维模型中,忽略阻尼对电机振动的影响,对其进行谐响应分析㊂611电㊀机㊀与㊀控㊀制㊀学㊀报㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第27卷㊀对于8极48槽永磁同步电机,主极磁场44次和52次谐波与-44次和52次一阶齿谐波相互作用是电机产生振动噪声的主要根源[25]㊂通过有限元仿真求解得出两台电机分别在额定运行工况下(n =4700r /min,P =67.5kW,f =313.33Hz)和峰值工况(n =4100r /min,P =90kW,f =273.33Hz)下机壳表面振动加速度如图9所示㊂分析得出,额定工况和峰值工况下振动加速度具有相同的频谱特性,8倍频接近定子三阶振型的固有频率以及电机一阶齿谐波频率分别对应10倍频和12倍频,因此产生了相对较大的电磁振动;两台电机相比,V +1型电机在4倍频下的振动加速度高于V 型电机,其余频率下的振动加速度均低于V 型电机,与前文所分析的径向电磁力结果相对应㊂图9㊀机壳表面振动加速度频谱对比图Fig.9㊀Comparison of vibration acceleration spectrumon the surface of the housing以电机为中心,1m 为半径,在电机附近建立空气域,将结构场中得到的结果映射到声场中,对电机的声波传播特性进行有限元仿真计算㊂由于电动汽车电机常运行在宽转速范围内,利用远场声功率级瀑布图对两台电机在全转速范围内的噪声频谱特性进行分析,如图10所示㊂当频率接近12倍频时产生的电磁噪声最大,其中,V 型电机电磁噪声最大93.778dB,V +1型电机电磁噪声最大79.709dB,两台电机相比,V +1型电机电磁噪声的声压级约为V 型电机的85%,且对于由16倍频引起的电磁噪声明显降低㊂图10㊀全转速下噪声瀑布图Fig.10㊀Noise waterfall graph at full speed condition5㊀结㊀论本文根据设计参数控制设计变量,在保证永磁体用量完全一致的情况下分别建立单层和双层永磁体两种内置式永磁同步电机有限元模型,利用有限元仿真软件对改进设计后的电机交直轴电感参数㊁输出性能㊁径向电磁力密度㊁定子模态以及电磁振动噪声性能进行分析比较,得出以下结论:1)由于磁路结构的不同,造成了两台电机在磁路磁阻以及交直轴电感上有所差异,双层内置式永磁同步电机具有更大的凸极率,更易于产生磁阻转711第1期谢㊀颖等:内置式永磁同步电机不同转子拓扑结构的电磁性能及电磁振动噪声分析矩,同时在输出性能上具有更加良好的稳定性㊂2)在忽略模型轴向形变模态振型的条件下,增添机壳后的定子铁心相比于单定子铁心结构可以提高模态同阶振型的固有频率,从而可以据此特性减少发生共振的可能性㊂3)气隙中永磁体磁场和电枢反应磁场相互作用产生径向电磁力,径向电磁力是电机产生电磁振动噪声的主要原因㊂转子结构的不同会对电机的磁场分布产生影响,进而影响电机的径向电磁力以及电磁振动噪声表现㊂4)双层内置式永磁同步电机的气隙磁场和径向电磁力密度谐波幅值总体上低于单层内置式永磁同步电机,V+1型电机最大电磁噪声为79.709dB, V型电机最大电磁噪声为93.778dB,且对于V+1型电机由16倍频引起的电磁噪声声压级大幅度低于V型电机㊂参考文献:[1]㊀GAO Lingyu,ZHENG Hangbing,ZENG Lubin,et al.Evaluationmethod of noise and vibration used in permanent magnet synchro-nous motor in electric vehicle[C]//2019IEEE Transportation E-lectrification Conference and Expo(ITEC),June19-21,2019, Detroit,MI,USA.2019:1-4.[2]㊀郑江,代颖,石坚.车用永磁同步电机的电磁噪声特性[J].电工技术学报,2016,31(S1):53.ZHENG Jiang,DAI Ying,SHI Jian.Electromagnetic noise char-acteristics of permanent magnet synchronous motor applied in elec-tric vehicle[J].Transactions of China Electrotechnical Society, 2016,31(S1):53.[3]㊀王虹雨.电动汽车用内置式永磁同步电机电磁噪声振动特性研究[D].杭州:浙江大学,2021.[4]㊀CHEN Xin,LI Guoli,QIAN Zhe,et al.Performance analysis andcomparison of two kinds of double-layer permanent magnet syn-chronous motors[C]//202015th IEEE Conference on Industrial Electronics and Applications(ICIEA),November9-13,2020, Kristiansand,Norway.2020:872-875.[5]㊀胡文鸾.不同转子拓扑结构内置式永磁同步电机性能优化的研究[D].北京:北京交通大学,2019.[6]㊀胡耀华.电动汽车用内置式永磁同步电机的研究[D].南京:南京航空航天大学,2017.[7]㊀李岩,李双鹏,周吉威,等.基于定子齿削角的近极槽永磁同步电机振动噪声削弱方法[J].电工技术学报,2015,30(6):45.LI Yan,LI Shuangpeng,ZHOU Jiwei,et al.Weakening approach of the vibration and noise based on the stator tooth chamfering in PMSM with similar number of poles and slots[J].Transactions of China Electrotechnical Society,2015,30(6):45.[8]㊀王晓远,贺晓钰,高鹏.电动汽车用V型磁钢转子永磁电机的电磁振动噪声削弱方法研究[J].中国电机工程学报, 2019,39(16):4919.WANG Xiaoyuan,HE Xiaoyu,GAO Peng.Research on electro-magnetic vibration and noise reduction method of V type magnet rotor permanent magnet motor electric vehicles[J].Proceedings of the CSEE,2019,39(16):4919.[9]㊀邢泽智,王秀和,赵文良,等.表贴式永磁同步电机电磁激振力波计算与定子振动特性分析[J].中国电机工程学报,2021, 41(14):5004.XING Zezhi,WANG Xiuhe,ZHAO Wenliang,et al.Calculation of electromagnetic force waves and analysis of stator vibration char-acteristics of surface mount permanent magnet synchronous motor [J].Proceedings of the CSEE,2021,41(14):5004. [10]㊀徐珂,应红亮,黄苏融,等.转子分段斜极对永磁同步电机电磁噪声的削弱影响[J].浙江大学学报(工学版),2019,53(11):2248.XU Ke,YING Hongliang,HUANG Surong,et al.Electromag-netic noise reduction of permanent magnet synchronous motor bystep-skewed rotor[J].Journal of Zhejiang University(Engineer-ing Science),2019,53(11):2248.[11]㊀WANG Xiaoyuan,SUN Xibin,GAO Peng.Study on the effectsof rotor-step skewing on the vibration and noise of a PMSM for e-lectric vehicles[J].IET Electric Power Applications,2020,14(1):131.[12]㊀TSOUMAS I P,TISCHMACHER H.Influence of the inverter smodulation technique on the audible noise of electric motors[J].IEEE Transactions on Industry Applications,2014,50(1):269.[13]㊀JIAO Guandong,RAHN C D.Field weakening for radial forcereduction in brushless permanent-magnet DC motors[J].IEEETransactions on Magnetics,2004,40(5):3286. [14]㊀FU Lin,ZUO Shuguang,DENG Wenzhe,et al.Modeling and a-nalysis of electromagnetic force,vibration,and noise in perma-nent-magnet synchronous motor considering current harmonics[J].IEEE Transactions on Industrial Electronics,2016,63(12):7455.[15]㊀唐任远.现代永磁电机理论与设计[M].北京:机械工业出版社,2015.[16]㊀陈丽香,潘敬涛,孙宁.新能源汽车用永磁转子结构分析[J].电机与控制应用,2019,46(2):117.CHEN Lixiang,PAN Jingtao,SUN Ning.Rotor structure analy-sis of permanent motor for new energy automobile[J].ElectricMachines and Control Application,2019,46(2):117. [17]㊀韩雪岩,张新刚,朱龙飞,等.内置式多层磁钢永磁同步电机振动噪声抑制措施[J].电机与控制学报,2021,25(8):70.HAN Xueyan,ZHANG Xingang,ZHU Longfei,et al.Measuresto reduce vibration and noise of interior permanent magnet syn-chronous motor with multilayer permanent magnets[J].ElectricMachines and Control,2021,25(8):70.811电㊀机㊀与㊀控㊀制㊀学㊀报㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第27卷㊀。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
参赛队员签名: 带队教师签名: 日 期:
I
摘
要
本文主要介绍了智能小车控制系统的软硬件设计及开发过程。 整Байду номын сангаас系统涉及车模机 械结构调整、电机驱动和放大电路的设计、路况采集和信号处理等多个方面。
本文设计的智能车系统以 MK60N512VMD100 微控制器为核心控制单元, 以安 装在车体前的工字电感作为循迹传感器,采用干簧管检测起跑线,通过光电编码 器检测模型车的实时速度,使用 PID 控制算法调节驱动电机的转速和转向舵机的角 度,实现了对模型车运动速度和运动方向的闭环控制。为了提高模型车的速度和稳 定性,使用 LABVIEW、遥控、按键等调试工具,进行了大量硬件与软件测试。实 验结果表明,该系统设计方案确实可行。 经实际场地测试, 本车模系统可以很好的适应各类不同的赛道类型以及不同类 型赛道的不同组合。
目 录.................................................................................................................. IV 引 言.................................................................................................................1
第八届“飞思卡尔”杯全国大学生 智能汽车竞赛
技 术 报 告
学
校:德州学院
队伍名称:白杨-M 参赛队员:房立朝 卢瑞建 刘增强 带队教师:孟俊焕 高莉
关于技术报告和研究论文使用授权的说明
本人完全了解第八届“飞思卡尔”杯全国大学生智能汽车竞赛关保留、使用技术 报告和研究论文的规定,即:参赛作品著作权归参赛者本人,比赛组委会和飞思卡 尔半导体公司可以在相关主页上收录并公开参赛作品的设计方案、技术报告以及参 赛模型车的视频、图像资料,并将相关内容编纂收录在组委会出版论文集中。
第一章 系统设计................................................................................................. 2 1.1 整车设计.................................................................................................. 2 1.2 整车布局.................................................................................................. 3 第二章 系统机械设计及实现..............................................................................4 2.2 底盘高度的调整.......................................................................................4 2.3 舵机安装结构的调整............................................................................... 4 2.4 前悬挂调整.............................................................................................. 5 2.5 后悬挂的调整...........................................................................................6 2.6 测速装置的安装.......................................................................................6 2.7 电感支架的安装.......................................................................................7 2.8 轮胎的处理.............................................................................................. 7 2.9 差速结构调整...........................................................................................8 第三章 硬件系统设计及实现..............................................................................9 3.1 硬件设计方案...........................................................................................9 3.2 单片机最小系统板......................................................................... 10 3.3 传感器的选择.........................................................................................11 3.4 放大电路和检波电路的设计..................................................................11 3.5 电路设计方案.........................................................................................12 3.6 电源稳压电路及检测电路..............................................................13 3.7 电机驱动电路................................................................................. 14 3.8 舵机接口电路................................................................................. 15 3.9 人机交互界面................................................................................. 16
III
第四章 软件系统设计及实现............................................................................ 17 4.1 电感的布局............................................................................................ 17 4.1 传感器滤波与归一化............................................................................. 19 4.1 位置解算................................................................................................ 20 4.1.5 路径优化..................................................................................... 20 4.2 PID 控制算法介绍................................................................................ 21 4.2.1 位置式 PID.................................................................................. 22 4.2.2 增量式 PID.................................................................................. 22 4.2.3 PID 参数整定.............................................................................. 23 4.4 驱动电机的控制算法............................................................................. 24 第五章 系统开发及调试工具............................................................................ 25 5.1 开发工具................................................................................................ 25 5.2 无线调试蓝牙模块................................................................................. 25 5.2.1 Labview 上位机.......................................................................... 26 5.4 遥控模块................................................................................................ 27 第六章 模型车的主要技术参数........................................................................ 29 结 论.................................................................................................................. 30 参 考 文 献........................................................................................................... I 附录:程序源代码..................................................................................................I