全站仪高程精度分析
全站仪三角高程测量的精度分析
牛 东峰 1 董 婉 丽 2
( 1中冶集 团武汉勘 察研 究 院有 限公 司 湖北 武 汉
摘
4 0 8 2吉林 市规 划局 检 察支 队 吉林 吉林 300
12 1 ) 3 0 1
要 : 站仪 三 角高程 测量具 有效 率 高 、 全 实施灵 活等优 点 , 经研 究 并通过 实践验 证 , 对观测 结果 进 在
参 考 文 献 1 闫修 林 . 增 苗 . 波 图 技 术 在 雷 达 终 端 阮 杂
系列 处理 .完 成 后 传送 N RC通 道 输
出及 控 制参 数 .同时 在 引脚 F A 上 L G1
产生低 脉 冲 .使 AD P 4进 入 中断服 务 S#
程序 , 收 由 A S # 送 出的数 据 。 接 DP1
有 限 , 前 只 在 中 、 比例 尺地 形 图测 以 小
1 三 角 高 程测 量 高差 计 算
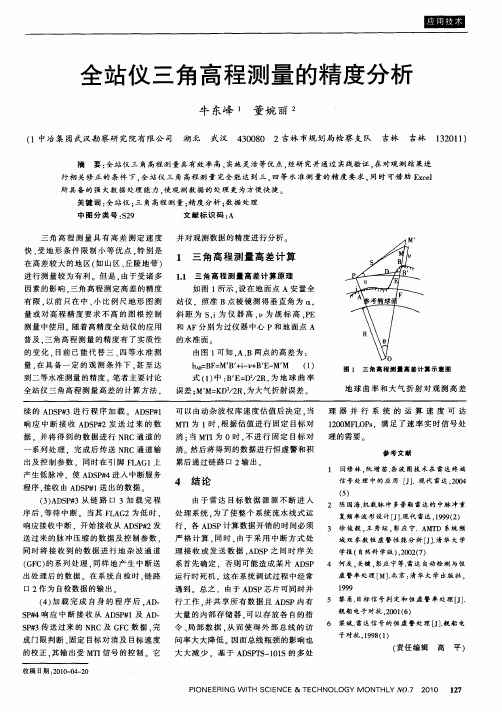
11 三角 高程测 量高 差计 算原 理 .
如 图 1所 示 . 在 地 面 点 A 安 置 全 设
站仪 .照 准 B点 棱镜 测 得垂 直 角 为 . 斜 距 为 S, 为 仪 器 高 , i v为 觇 标 高 , E P 和A F分别 为 过仪 器 中心 P和地 面点 A
2 陈 国海. 机栽 脉 冲 多普 勒雷达 的 中脉 冲重 复频 率波形 设计 [ ] J. 现代 雷达 ,9 9 2 19 ( ) 3 徐俊 毅 , 秀坛 , 王 彭应 宁.AMT 系统 频 D
响 应 接 收 中断 .开 始 接 收 从 AD P 2发 行 .各 AD P计算 数据 开销 的 时间必 须 S# S
的 水 准 面
全站仪三角高程测量方法及精度分析

全站仪三角高程测量方法及精度分析摘要:通过结合全站仪和跟踪杆,我们可以大大提升测量高程的准确性,并且随着应用频率的增加,这种方法也会受到越来越多的重视。
相比于传统的三角测量方法,新型的三角测量技术不仅可以克服其局限性,还能够大大降低误差,提升测量精度。
通过采用无需重复测量仪器和棱镜高度的方式,可以大大减轻外部作业的负担,并且提高测量的效率,这种方法在实际应用中表现出色。
关键词:全站仪;三角高程测量;测量方法;精度分析引言通过使用全站仪测量三角高程,我们可以建立一个三维坐标控制网。
这种方法包括对向观测法和中间观测法。
在进行对向观测时,我们通常会将大气折射系数视为一个常数,但是如果我们忽略了不同方向折射系数的差异性,那么我们就无法准确地评估整个系统的精度。
通过中间观测法,我们可以将折光系数作为一个方向变量来考虑大气折射误差对三角高程测量的影响。
因此,本文将详细介绍三角高程测量方法,并对它们的准确性进行比较分析。
1研究背景和现状高程测量是测量工作的重要组成部分,现代高程测量技术包括水准测量、三角测量和GPS高程测量。
然而,GPS 高程测量技术存在测量精度较低的问题,无法满足日常测量的需求。
此外,传统的三角测量技术,如全站仪测量,也存在一定的局限性,无法满足高程测量的需求。
通过使用全站仪进行三角测量,可以获得两点之间的垂直高度差,这种方法比传统的水平测量更加精确,而且由于没有受到地形的影响,可以更加迅速、准确地完成测量任务。
2全站仪的基本测量原理测量是一项重要的技术,它的主要目的是测量物体的位置、倾斜角、高差。
与传统的测量方式不同,全站仪可以快速、准确地完成测量,大大提高了测量效率,并有效地减少了测量结果的偏差。
全站仪望远镜具有独特的优势,它的核心技术就是其精准的视准轴、高精度的测距光波发射与接收光轴的同轴化,以及可靠的双轴自动倾斜补偿,使得它可以一次性完成所有的测量要素,并确保测量结果的准确性。
3全站仪三角高程测量方法特征分析以及研究进程3.1单向观测法使用全站仪三角高程测量单向观测法可以获得较高的水准测量精度,但是在进行测量之前,必须充分考虑地球曲率和大气折射带来的可能影响,这将会对测量结果产生重大影响。
全站仪三角高程测的精度分析
的中 误差分别为ms, ma, mk , mi, mv, 根据“ 一般函
数 中误差等于该 函数按 每个 观测值所求 的偏导 数
收稿 日期 :2005 一10 - 25
实际测量 中, 全站 仪测距 s 的误 差极小, 一般 可忽略不计 ; 当距离 5 较短 时, 大气垂 直折 光误 差
差。
参考文献 :
[1」 刘培文. 公路施工A 童 l 技术【 . 人民交通 M]
出版 社 , 20 0 1 .
[2〕 中国大 百科全书 编样 部. 中国大 百科全书 (光 盘 1. 1 版 , 土木工程卷) [M] . 北京: 中国大百科 )
角, 为大气 垂直折光 系数, 为地 球平 均曲率 半 k R 径 ,为仪 器高 , 为规牌高或棱镜高 , s, a, k, i, v i v 设
tg" ,+2 (m (2)2、一:+ : 2m S一 P)2 R " m
式中 M, 是 以度、 、 分 秒为单位 的角度误差, 必
须化成以弧度为单位。 即:Ma= M, i, lp n , (p ^ =
则有
:m一士 .(买 h 。
为削弱垂直折光系数误差的影响, 角高程测 三 量中必须对向观测, 按误差传播定律对 向观测高差
中误差 :
rh 一 m nV六 h
代 上 得 h一夫 (斋 入 式 :m 士 一 双
此式说明, 垂直角测量误差 m。 当 一定时, 三
角高程测量高 差 的中误差 与距 离成 正 比, 离越 距 远, 误差越大 , 而提高测 距精确度 也无法 有效减小
当在两水准点间进行 三角高 程测量, 需多次设 站测量高差才能闭合时, 根据误差传播定律得两水 准点间高差中误 差:
全站仪不同方法施测三角高程测量的精度分析

【 e od] obedr tnosr t nr nl e vtn u e; i a- e o sr tntag l ao r yA cr yaa s K yw rsDul ico ev i i g eao r yMd ym t do e ao inle vtns v ; cua l i — e i b ao ta e l i sv w h b vi r e e i ue c n ys
T n atrerra lss h no rn miso rn i l a p le of ur u h ro omua epe t ey a d te o tatv n l s s he f ro nay i.te e 'rta s sin p icpe w sa pid t g e o tt eerrfr lsr s ci l n h n ac nrsie a ay i wa e i v s ma efre c lv t n s re c u a yo h mp c fvro sfcos T ay i e ut h w h ti in l lv t n S re igb sn oa d o a h ee ai uv y a c rc nt ei a to aiu a tr. hea lssrs l s o t a fTra ge Ee ai u yn y u igttl o n s o v sain Wa D id wihn cran rao a l a g s h b e ainr s o l e c h trlv ln u vy me s rme t fga h e rga e tto Sa pl t i eti e sn ber e ,teo sr to euh c ud ra h tewae e eigs re au e n so rdetreo r d e n v
全站仪精度分析

全站仪精度分析全站仪代替水准测量精度分析1.引言目前, 在水准测量中, 水准仪仍然是主要的使.用仪器, 但山丁仪器本身的原因, 其仅使用于平坦地区在地形较复杂地区使用水准仪进行水准测量, 测站数很多, 精度也很难保障。
随着电子技术的发展, 与全站仪的普及, 测距精度已人人提高。
全站仪己普遍用于控制测量、地形测量和上程测量中。
但是能否使用全站仪代替水准仪进行水准测量是广大测量所关心的问题, 本文结合全站仪三角高程测量的原理和方法, 并将其主要误差来源与水准仪进行对比分析, 进而分析其代替水准测量的可行性。
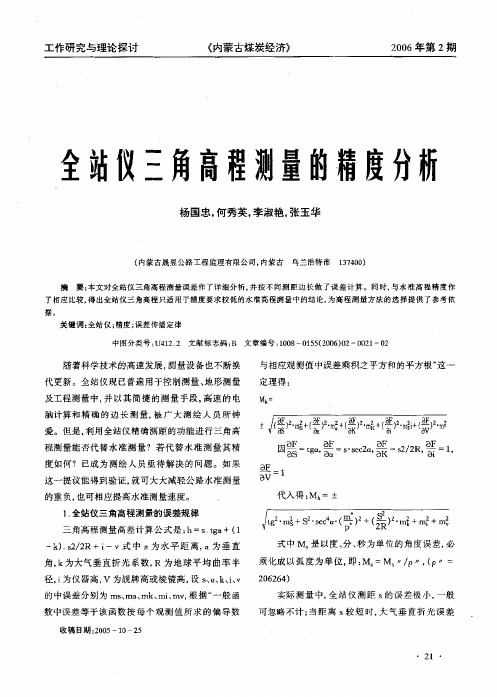
全站仪三角高程测量及其精度分析根据误差传播定律,得到(2) 式计算高差中误差为:则(3) 式可化简为如果取测角标准差mα= ±1″,测距标准差m S = ±(2 + 2 ×10 - 6 S ) mm ,仪器高和棱镜高量取中误差m g= ±110 mm ,则对应不同的竖直角α和倾斜距离S ,对向观测高差的中误差见表1 所示。
表1 对向观测高差中误差(单位:mm)从实验数据分析可看出:对向观测高差中误差随着竖直角及视线斜距的增大而增大。
对于短测距边长,仪器高和棱镜高量测误差是全站仪三角高程的主要误差。
若取二倍中误差作为三角高程极限误差,则对于测角中误差为±1″全站仪,对向观测法在测距边长大于100 m 情况下,其三角高程精度可以满足三等水准限差要求。
2 中间观测法不同方向的大气折光系数是有差异的,因而简单地进行对向观测加以抵消与实际的情况有出入。
为了提高三角高程观测精度,可采用中间观测法,即将全站仪置于A 和B 两点大致中间位置处,设S A 、S B 分别为测站与测点A 和B 之间的倾斜距离; D A 、D B 分别为测站与测点A 和B 之间的水平距离;αA 、αB 为全站仪照准棱镜中心的竖直角; i 为仪器高; v A 、v B 为棱镜高; R 为地球曲率半径。
使用全站仪进行高程测量的技巧与方法

使用全站仪进行高程测量的技巧与方法全站仪是一种高精度的测量仪器,广泛应用于土木工程、建筑、测绘等领域。
它具有测角、测距和测高程的功能,可以在施工现场进行高程测量。
本文将介绍使用全站仪进行高程测量的技巧与方法。
一、准备工作在使用全站仪进行高程测量之前,我们需要进行一些准备工作。
首先,应确定测量区域的范围,并在测点之间设置基准点。
其次,应选择合适的测量方法,如水准测量法或三角测量法。
最后,要确保全站仪的电池充足,仪器的调准和校准工作已经完成。
二、设置全站仪在进行高程测量之前,我们需要正确设置全站仪。
首先要调整全站仪的水平仪,使其水平。
然后通过调整仰角和方位角来使仪器对准目标点。
在调整仰角时,可以使用全站仪的自动水平功能,确保读数准确。
三、测量过程1. 水准测量法水准测量法是一种常用的高程测量方法。
首先,在基准点上设置一个水准标尺,然后在需要测量的点上进行读数。
在读数时,应注意仪器是否水平,并记录下目标点与水准标尺之间的高差。
2. 三角测量法三角测量法是一种间接的高程测量方法,通过测量两个已知高程的点和目标点的角度来计算目标点的高程。
在进行三角测量时,需要选择合适的观测位置,并使用全站仪测量观测点与目标点之间的角度。
根据三角测量原理,可以通过计算得到目标点的高程。
四、数据处理与分析在进行高程测量之后,需要对测得的数据进行处理与分析。
首先,应对数据进行校正,排除由于仪器误差和环境因素导致的误差。
其次,可以使用数据处理软件进行计算,得出具体的高程数值。
五、误差控制与精度评定在进行高程测量时,误差是不可避免的。
为了提高测量精度,应注意以下几点。
首先,应选择合适的观测位置和测量方法,尽量减小仪器误差。
其次,应进行多次观测和重复测量,以提高数据的可靠性。
最后,可以通过与其他测量方法的对比,评估测量结果的精度。
六、应用与展望使用全站仪进行高程测量在土木工程、建筑和测绘等领域具有广泛的应用前景。
通过高程测量,我们可以确定地表的高度分布,辅助工程设计和布局。
全站仪三角高程测量精度分析
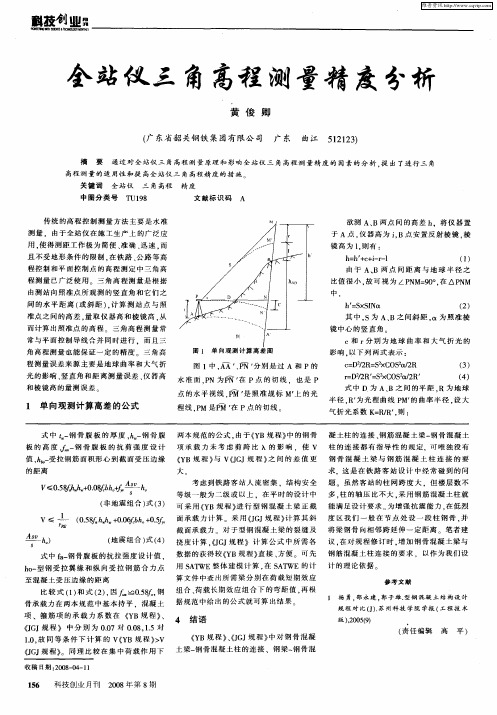
欲 测 A、 B两 点 间 的高 差 h .将 仪 器 置 于 A点 , 器 高为 iB点 安 置反 射 棱 镜 . 仪 , 棱 镜 高 为 1 则有 : .
h h + + — _ = c ir l () 1
用 , 得 测 距 工作 极 为 简 便 、 确 、 速 . 使 准 迅 而
c D /R=  ̄C Y 2 = : 2 Sx OS d R
D / R S x 2 2 = COS 2 / R
图 1中 . 、 蕊
水 准 面 . N 为 P
分 别 是 过 A 和 P的
( 3)
( 4)
在 P点 的切 线 .也 是 P
点的水平视线 . 丽 照 准 觇 标 M 上 的 光 是 程线 ,M 是 P点 的切 线 。 P 丽 在
式 中 D 为 A、 B之 间 的平 距 . 为 地 球 R
1 单 向观 测计算 高差 的公式
半 径 . R 为光 程 曲线 P 曲率 半 径 . 大 M的 设
气 折 光 系数 K RR . : = / 则
式 中 £ 钢 骨 腹 板 的 厚 度 , 一 骨 腹 两 本 规 范 的公 式 , 于 《 B规 程 》 的钢 骨 凝 土柱 的连 接 、 筋 混 凝 土 梁 一 骨 混 凝 土 一 钢 由 Y 中 钢 钢
光 的影 响 、 直 角 和距 离测 量 误 差 、 器 高 竖 仪 和 棱 镜 高 的量 测 误 差
图 1 单 向观 测 计 算 高 差 图
其 中. S为 A、 B之 间斜 距 , 为 照 准棱 镜 中 心 Nhomakorabea的竖 直角
c和 r 别 为地 球 曲 率 和 大 气 折 光 的 分
影 响 . 下列 两 式 表 示 : 以
全站仪三角高程测量的精度分析

科 之 学 友
Fn fieme rd e a r i S n A ts eocc u
28 0J4 0# 8() 0- ,2国 E
全 站仪三角高程测量 的精度分析
王 培 堂
( 山西 晋城 路 桥 建 设 有 限 公 司 ,山西 晋城 080) 4 0 0
, ) ( g D ta + ( +A一 ( l 联 : 锄 一 mg  ̄)1 i l) 一 A ) () 9
由于对 向观测可 以抵消地球曲率和大气折光 的影响 , 因而在 三角高程 测量 中采用 了对 向观测来提高精 度。
2 全站 仪 三角高 程 的精度 分析
由对 向观测计算高差的基本公式 :
、
l0 o 2. 2 2 9 7 303 3 1 4 94 .6 . 9 .4 3. 7 28 3 4 3 3 7 5 .7 .9 63 5 . 2 948 . 7 3 0 o 3 5 1 3 5 4 3 7l 39 4.4 4 4 5 6 5 3 1 . 5 l 43 .2 .9 . 9 .0l 19 .7 .7 09 4 6 2
h Dg +— = t if a () 1
其 中 :: h 为对 向观测高差 的平均值
毋= -l gr  ̄ l , , =i a
根据误差传播定律求得 (0 中 h的中误差 : 1)
mh ( 旦 ) Z 。 _ = + m a) ( ( 2 g + )
表 1 mr =±1 限 差计 算 表 ”
、D / 、 D /二者综 Nhomakorabea影响称为球 气差 或两差改正值 即:
5 2 8 2 8 8 2 9 305 3.7 3 3 9 2 6 3 4 4 2 6 7 8 0 . 61 . 9 . 6】 . 3 1 7 .3 .8 .7 .0
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
杆高 h, 大气折光系数为 K 则: , 其中 。 H 二 + + x h+ 1 x 二 , S n 一 , (一 ) a H h ss i
2 x o a R ' s Sc ' () 1 模式二: M, B A点以外任意点( 在 考虑全站仪 最短视距和最长视距) 架设全站仪, 刀犷 先在 浮点安置
站仪一般都在度盘对经 10 的位置上设有两个读 8。 数装置, 在显示窗上显示的数值, 为两位置读数的平 均值, 度盘偏心差的影响可以消除。 ③ 竖盘指标差( 指 。竖盘指标差可在盘左、 二) 盘右的平均值中, 予以消除。但在单盘位观测竖直 角消除指标差是比较困难的。由于全站仪一般均设 有机内 软件, 又采用对经 1 。 8 读数能方便的消除指 0 标差( 对已校仪器可以不考虑其影响) 。 所以仪器误差对竖角的影响为 :
比较式( ,2可知: )() 1 ① 式() 1不仅存在测角误差、 测距误差、 折光系
数误差, 还存在 h, , 误差, h , 而且量取 h h 过程繁 ,
锁, 精度很难提高。 ② 式() 2仅存在测角误差、 测距误差、 折光系数 误差。故在测量中, 模式二要比模式一应用频率高, 下面分析以模式二为基础。 22 误差分析 . 由式() 2得影响 A点高程精度的误差主要来源 于竖直角a和距离S 大气折光系数 K , o 221 测角误差 ..
1 三、 四等水准测A限差
a 三等水准测量限差。 .
对中 棱镜高 h测得斜距 S 竖直角 a, A 杆( ) , 再在 点上安置该对中杆保持镜高不变, 测得斜距 S, ,竖 直角。, : 两次测量中大气折光系数分别为 K.Z ,Ku
则:
。 =t Lm 限 1v m 2
b 四等水准测量限差。 .
〔 收稿日期」 03 0 - 8 20 - 4 0
刀十x x +i , (2) 斗 zu / 2 n m x c l
式中:。 C 为真空光速; 。 。 为真空中光速测定误差; n 为大气折射率; 。 m 为大气折射率的误差; 为调 ; f
② 度盘偏心误差( i o Ml ) 竖直度盘的中 心没有
严格位于 横轴的 上, 度盘 产生 轴线 从而 读数 误差, 全
中杆与垂线方向夹角;” 2 级经纬仪的圆水准器灵敏 度为 1 ' m S为对中杆至全站仪的斜距; 0/ m, 2 对于2 ' " 级经纬仪 。 二 。 0 ③ 读数误差。角度数最小显示一般设为 l, "故
存在取舍值, 所以: , 04 。 二士 ."
观测误差对竖直角的影响 :
m 二* 氨+ 毛十 盏 。 丫m 二 m ; 故测角误差:, m = 轰 m ; 丫m + 所以,“ j } 2级经纬 仪,。 28" 。 =土 . 6
222 测距误差 .. a 仪器误差。目 在工程测量中所用全站仪 . 前( 均采用相位法) 测距方式 , 其基本公式:
a 仪器误差( 仪 。 。 ) . ① 度盘分划误差( 分 。 。 ) 度盘刻划误差包括偶 然误差和周期误差。2级误差经纬仪的度盘刻划偶 "
[ 要〕 摘 从影响全站仪高程测量的外部因素( 大气折光) 和内部因素( 测角、 测距) 人手, 综合分析各因素产生 的误差, 并运用误差传播定律, 对其精度进行评定。 【 高程测量、 关健词l 误差; 精度探讨; 水准测量 【 中图分类号」 422 U1. 【 文献标识码] A 【 文章编号」 02 0( 0) - 9 0 10- 5 3 05- 1 2 0 0 2 0 3 3
制 频率;, 。 为调制频率误差;, m 为相应相位差4
的测量误差; a为加常数的误差。 m. 另加上由于信号串扰所产生的周期误差 二 , 乱 则: 二 I a 此即全站仪的 。D M + 。 m 标称精度:
M, 二土( A+B 。 D) 式中: A为固定误差; B为比例误差; D为实测距离
然误差一般均小于 *02 " 而周期误差可达 士1 .5 ,
- "故以士 ” 2, 2作为2级经纬仪的度盘刻划对竖直 “
角影响误差 。
D 二 = ( 娜 2) ,二 o 了( N+ 干 n +C C 2 N+ 。x 2 / 4 _n + . 故其中 2) C ; 误差公式为: m [m C , ( , f' ( 、 O + 二- )+ m 、n'x 卜 (o m ) ]
Dsus n A crc o Atue aue et n T t Sa o i so o cuay ltd Mesrm n Ui o l t n c i n f i s g a t i
T O a- eg A 1 ih n l s
(h g a mnao Uir y Cag a Hn 407, a Ca s Cm ucis vs , n h, a 1 6 Ci ) n h o itn n ei h s u n 0 t h n
士2尸 。
根据式()由误差传播规律可得: , 2
m (, p' ian + ; , a、 ) ; s, I, S oa: 卜 S o, m, , c c s +n s s
2 x + 1 K)+ Rc', S)x + R ' (一 , 4 ' s x , m, m, , . ' o a ( z s 2 (一 , -W p s' , + S o; 1 K)- x S 'x ax ' 4 (卜 ) 2 试, ( ca二 i n , s
折光系数一般取值为0 1, . 但是它实际并不是 4 常数, 其大小主要取决于空气的密度, 空气密度是随 时间而变化的, 以某个时刻或某段时间内的系数 所 值是存在误差的, 曾有试验证明, 折光系数的误差为 土. 一., 00 00 在此取其平均数 。 3 5 系二* . 0 00 4 3 小结
H 二H+h S x + 1 ,: Rx + , n , ( 一K ) 2 a sa i
[ 作者偏介1 肉海生(9 〕 1N 一)男, 湖南安化人, 工程师, 主要从事公路 、 桥梁设计 、 监理工作 。
中 南
公 路从而引起竖直角误差。 s oa一 , a一 一 1 K) 2 / ; , Sx , h (一 ,= R c' s s i n S o a Sxi , S x , (一 ,; Z 2 , a一 i a+ 1 K) c2 H+ s s = n s i n m = L c 月 S) 2 6 Lo = x 2 a (一 s 0 5 6 一般取其为 1 m ( . ; 为对 2 3 2 x o a一 1 K) 2 S o a R ; s , (一 z= Rx 2 s , ( Sc' c ' L 对中杆气泡高, 2 ) 式中: 为
第2 卷 , 期 8 第3
2 003年 9月
中 南 公 路 工 程 Cn a Su Hgw y g er g etl t i a E i en r o h h nn i
V l2 o. 8
Sp. e ,
2. ,3 N 0 o 0
全站仪应用于高程测量之精度探讨
陶海生 ( 长沙交通学院, 湖南 长沙 407 1 6 0
目: p
计算公式, 现以2 级标称精度为: (m + m “ 士 2m p ) 2p
( 对于一台固 定仪器)M。 ; '为给定的 技术参数。
b 对中杆误差。一般来说, 中杆的误差在 . 对
m = 冬+ 石+ 弘 m m , j 丫。
b 观测误差。
t .- m 之间, 05 1 m 在此采用 二 二土 m . m 1 m 22 大气折光系数误差。 .. 3
[br t h a r re il nys r s e Tip ec ph se a let e rc s 场v o ft , un t e Asa ] p o e nvy z h r a d a u ao ili h x t c s m a e o u i cs c r s r n dg - e t ao s c a a rrt l ta t ie aoe ( c ama r e a l a ma r e e l ( h i e cd ) h n r l s h e u mn ne n e u mn m n s s f e i n e n ns s s e t s s e t e u r a g h d t u g d
M =t / , . E 2 L 0
式中: L为路线长度, , k m
2 全站仪高程测f误差分析
21 测童模式( . 已知水准点 B M高程 H 求未知点 ,
A高程 H ) a
模式一: 材点上架设全站仪, A点上架 刀 在 在 设中杆, 测设斜距 S竖直角 a量取仪器高 h, , , , 对中
① 照准误差 . m 。无论是照准 A点还是B " M
点, 照准误差对竖角影响可用下式表示:
ma=tP"V I
式中: 为望远镜放大倍数;” V 2级经纬仪放大镜倍数 一般在2 一 0 4 3 倍之间; P为人眼在理想状态下( 目 标亮度适宜 清晰度很好) 瞄准的判断能力。一般 尸 取6'则, . 6" 0 , . =10/ m V 所以对 2 级经纬仪而言, V 3, m 二 “ 设 = 0则 ,
②目 标偏心差 。 。由于对中杆偏离垂线方 。
第 3期
陶海生 : 全站仪应用于高程测量之精度探讨
p' m +ia/ 蚕 (i , 2 ) 毛+ )x 岌 s' 。 + Sc' R n2 oa、 2 s M (一 , - R /oax 2 喝 + 1 K)、 1 K)- c' ( )x ' ' s , S 2 (一 x 4 2 ' 4 2 i p) s2 , 乙 R S、 2/i2 x x ( n m a
dt c) wi my ct aid ma r et g l i , ape t e r sii ia e, h h ae h lue s e n un tastn ad ls r tn so sn c a f t t f e t e u m s o t o n p i h r r m sn i t a e a o p nie tea a t acr y h ma r et i p s v u e r c l o l t h cu c ot e u m n. e a f s e e [ e wr 3 lue se n 二 a u c dc sn len s aid ma r e ; ; c ry u i ; lg Ky d t o t eu m t c a i so e i s v 随着测量仪器及计算机技术的发展, 全站仪以 其操作简单、 快捷、 定位精度高等特点, 为工程技术 人员接受, 并在高速公路的勘测设计和施工中得到 广泛的应用。全站仪软件包中程序较多( 导线测量、 坐标测量、 水准测量等)导线测量、 , 坐标测量在高速 公路建设中, 因精度高、 施测快捷、 容易满足规范要 求, 而应用频率较高。用全站仪进行高程测量在高 速公路的 勘测和施工中, 虽然应用也较多, 但一般都 是应用在路基施工标高测量, 如果要应用在路面标 高、 结构物标高和路线标高等施工测设, 就其精度而 言, 人们仍持怀疑态度, 尚有争论。全站仪高程测量 究竟能否替代水准测量, 或部分替代水准测量及其 精度如何, 现以三四等水准测量限差作为比较对象 对其作一分析。