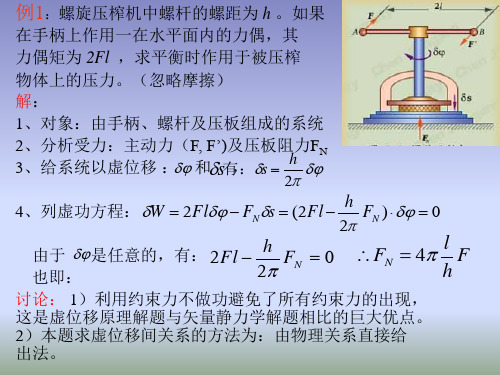
虚功原理应用例题
虚功原理及其应用1

表示的是物体在力系作用下处于平衡状态,若由于其
他原因使物体产生符合约束条件的微小连续位移δr,则
所有主动力(外力与内力)在虚位移上所做的虚功总和 为零。由于导数与微分已经引入到高中数学,这为求复 杂情况下物体的虚位移带来了方便,因此在高中应用虚 位移原理求解物理问题已成为可能。高中物理有关静力 学问题,用常规方法求解有时需要列出复杂的方程进行 繁琐的数学运算,但如果应用虚功原理求解,往往会使 问题的求解过程大大简化。下面通过几个具体实例谈谈 虚功原理在求解静力学问题中的应用。
例1
两滑块放在光滑水平面
上,中间用一根细线相连。
O
两根等长的轻杆OA、OB分别
θ
搁在两滑块上,且可绕铰链
F
O自由移动,两杆夹角为θ,
当用竖直向下的力F作用在
铰链上时,求两滑块间细绳
上的张力T的大小。
A
B
Oy
解析
θ
F
在细绳中点为原点,细线所在方向 为x轴,建立如图所示的坐标系。设 两杆长度均为l,
则O点的竖直位置坐标为:
A
y0 lcos 2
B点水平位置坐标为:
x B lsin 2
x B
①
②
假设在力F作用下O点竖直向下发生一小段位移dy0,在理 想约束情况下,B点应向右发生一段微小位移dxB,由对 称性知A点应向左发生和B点同样大小的位移,θ角增加
微小量dθ。我们分别对①、②式微分得:
dy0
由虚功原理得:
FdxB mgdy A 0
解得:
F mgcot
F θ
Bx
例3
如图3所示,一条长
θ
为L、质量为M的均
匀链条套在一表面
第14章 虚位移原理_例题
弹簧原长 (600 300 )mm
弹簧后来长
(600
300 cos
)mm
弹簧缩短
(
300 cos
300 )mm
弹簧力 F
k
(
300
ቤተ መጻሕፍቲ ባይዱcos
300 )
由虚 位移原理:
M • F •ra F •rB 0 M Frr 0 0
[M
1.5(
1 cos
1)
0.3
sin cos2
0] 0
解: 对系统:建立坐标系和受力分析 解析法:
yK 6l sin yK 6l cos (1)
虚功方程:M W 6l cos 0 (2)
所以: M 6Wl cos
例6: 书14-5
当OC绕轴O摆动时,滑块A沿曲柄滑动,从而带动杆AB在导槽
内移动,不计各构 件自 重与各处摩擦。OC a,OD l
rB 2a (2)
列虚功方程:
M PrD FBxrB 0
(3)
将(1)(2)代入(3),得:
M Pa FBx 2a 0
FBx
1 M 2 a
P
(2)求B 铰的垂直约束力: 解除B 铰的垂直约束,代之以垂直力 FBy 。 杆BCD 的速度瞬心在A
rD 5a
rB 2a
M PrD
F
、F
给出力
P
、
F
处的虚位移 rD、rB
几何法: rC cos rD
C
rC cos(90 2 ) rB cos
A
θ
θ rC D F
Fθ
rB
B
由虚功原理 PrD FrB 0 0
PrC cos F 2sinrC 0 (P cos 2F sin )rC 0
结构力学虚功原理最小势能原理解题示例

虚应变能为:
由虚功原理,有: ,即:
故梁的位移为:
图2.4
【虚功原理的其它例题可参见理论力学<静力学)第四章第7节】
例2.2 若用虚功原理求解,其步骤如下:
解:令梁的挠度函数为 ,它必须满足以下几个条件:
1、必须满足几何边界条件,但不一定满足平衡条件和力的边界条件;
2、由于有均布载荷q的作用,故 应为x的4次多项式。
图2.2
解:令梁的挠度函数为 ,它必须满足以下几个条件:
1、必须满足几何边界条件,但不一定满足平衡条件和力的边界条件;
2、由于有均布载荷q的作用,故 应为x的4次多项式。
故,考虑到梁左侧为固支,可设:
梁右侧需满足:
且梁右侧没承受弯矩,有:
<力的边界条件)
代入边界条件,有:
等截面梁的弯曲应变能表达式为:
申明:
所有资料为本人收集整理,仅限个人学习使用,勿做商业用途。
又:
【 】
由于变分可取任意值,故有:
所以:
虚功原理:当弹性体在外载荷作用下处于平衡状态时,对任意为约束所容许的虚位移,外力虚功等于内力虚功。虚功原理又称为虚位移原理。DXDiTa9E3d
例2.3 试用虚功原理求如图2.3所示梁的位移。
图2.3
解:令在外载荷P作用下,梁的转角为 ,则各杆的变形为:
给梁施加一个虚位移:
【根据平面假设,梁在受弯曲变形后,其横截面仍保持为平面,它一方面有挠度 ,一方面横截面在梁变形过程中旋转了一个角度 ,由于该转角的存在,使得距离中性轴为y处的x方向的位移为 ,应变 ,弯曲应力为 ,因此,等截面梁的弯曲应变能为: 】p1EanqFDPw
则系统的总势能为:
由最小势能原理可知,当结构处于稳定平衡状态时,有:
附录Ⅰ虚功原理及其应用(修订版)

CD
FN i FN i li (2 2) Fa Fa 1.138 Ei Ai 3EA EA i 1
n
()
21
I.3
图乘法*
22
I.3 图乘法*
梁和刚架的莫尔积 M ( x) M ( x) dx (a) 分公式可表示为: l EI 对于莫尔积分的计算,既可采用前面的直接 积分法,还可采用下面的图乘法。
I.2.1 单位载荷法
利用虚功原理可导出计算 结构一点位移的单位载荷法, 具体步骤如下: 位移状态
为求结构任一指定位移 力状态 (如图a所示);就在结构的 位移点沿位移方向作用一单 位力(如图b所示)。 图b中的内力分别为:F ( ),M (x)和F ( )。 N x Q x 把图(b)作为虚功原理的力状态,再把图(a)作为其 位移状态,则虚功原理(式13.18)可化为:
表示外力作用点沿外力方向的
虚位移,产生虚位移中外力保持不变,则其总虚功为:
W F1v1 F2v2 F3v3 q( x)v ( x)dx (a) l
i
注意:这种算法中, 杆件上的内力所做虚功为零。
5
I.1 虚功原理
而按另一种方法计算
总虚功,取右图所示 微段,分析表明:只 有两端内力在其虚变 形上做虚功,为
(b)
若轴力沿杆轴线为常量,(b)式化为:
FN l
n
( c)
对有n根杆的杆系,如桁架等,(c)式化为:
FNi li
i 1
(13.21)
12
I.2 莫尔积分及单位载荷法
同理,对受扭杆件,亦可推导得:
M x ( x ) d
l
(*13.22)
9 虚功原理和结构的位移计算习题
9 虚功原理和结构的位移计算习题1. 引言虚功原理是结构力学中一项重要的基本原理,它可以用于解决各种结构的位移计算问题。
本文将通过一些习题来演示如何应用虚功原理进行位移计算。
2. 虚功原理简介虚功原理是指在结构力学中,结构在虚位移下所进行的虚功等于零。
虚位移是指结构在受力作用下的无限小位移,不违反实际情况下的几何和边界条件。
利用虚功原理,可以建立结构的平衡方程,并求解未知的位移。
3. 习题一考虑一个简支梁,受到一个集中力F作用在梁的中点。
已知梁的长度L和截面的惯性矩I,求梁的最大挠度。
解答:根据虚功原理,可以得到以下方程:$$\\int_{0}^{L} M \\cdot \\delta dL - F \\cdot \\delta\\cdot \\frac{L}{2} = 0$$其中M为弯矩,$\\delta$为虚位移。
由弯矩与挠度之间的关系,可以得到:$$M = -\\frac{F}{2}L + F \\cdot x$$代入上述方程,得到:$$\\int_{0}^{L} \\left(-\\frac{F}{2}L + F \\cdot x\\right) \\cdot \\delta dL - F \\cdot \\delta \\cdot \\frac{L}{2} = 0$$对上述方程两边进行积分并整理,可以得到:$$\\frac{FL^3}{6EI} = \\delta$$所以梁的最大挠度为$\\frac{FL^3}{6EI}$。
4. 习题二考虑一个简支梁,长度为L,弹性模量为E,截面惯性矩为I,受到一个均布载荷q作用在梁上。
已知梁的两端处的位移分别为0和$\\delta_1$,求梁上某一点的位移。
解答:根据虚功原理,可以得到以下方程:$$\\int_{0}^{L} \\left(-M\\right) \\cdot \\delta dL -\\int_{0}^{L} q \\cdot \\delta dL = 0$$对上述方程两边进行积分并代入弯矩与挠度之间的关系,可以得到:$$\\frac{1}{2}EI \\cdot \\delta - \\frac{qL^2}{2} \\cdot \\delta = 0$$整理上述方程,可以求解出$\\delta$的值。
虚功原理(物理竞赛)教学内容

虚功原理(物理竞赛)§2、虚功原理上次课主要是介绍了分析力学中经常要用到的一些基本概念,并由虚功的概念和理想约束的概念导出了解决静力学问题的虚功原理:0=⋅∑i r i F δ。
虚功原理适用的范围是:质点组,它适用的前提条件是只受理想约束。
这次课就举一些具体例子,使我们能够了解如何利用虚功原理去解决静力学问题。
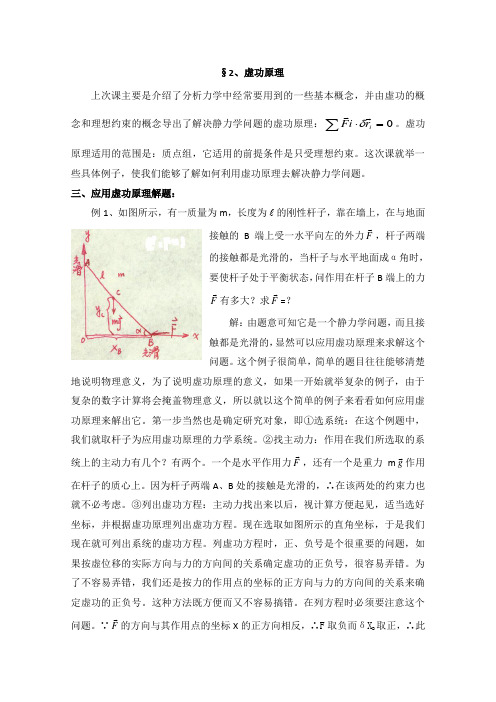
三、应用虚功原理解题:例1、如图所示,有一质量为m ,长度为 的刚性杆子,靠在墙上,在与地面接触的B 端上受一水平向左的外力F ,杆子两端的接触都是光滑的,当杆子与水平地面成α角时,要使杆子处于平衡状态,问作用在杆子B 端上的力F 有多大?求F =?解:由题意可知它是一个静力学问题,而且接触都是光滑的,显然可以应用虚功原理来求解这个问题。
这个例子很简单,简单的题目往往能够清楚地说明物理意义,为了说明虚功原理的意义,如果一开始就举复杂的例子,由于复杂的数字计算将会掩盖物理意义,所以就以这个简单的例子来看看如何应用虚功原理来解出它。
第一步当然也是确定研究对象,即①选系统:在这个例题中,我们就取杆子为应用虚功原理的力学系统。
②找主动力:作用在我们所选取的系统上的主动力有几个?有两个。
一个是水平作用力F ,还有一个是重力m g 作用在杆子的质心上。
因为杆子两端A 、B 处的接触是光滑的,∴在该两处的约束力也就不必考虑。
③列出虚功方程:主动力找出来以后,视计算方便起见,适当选好坐标,并根据虚功原理列出虚功方程。
现在选取如图所示的直角坐标,于是我们现在就可列出系统的虚功方程。
列虚功方程时,正、负号是个很重要的问题,如果按虚位移的实际方向与力的方向间的关系确定虚功的正负号,很容易弄错。
为了不容易弄错,我们还是按力的作用点的坐标的正方向与力的方向间的关系来确定虚功的正负号。
这种方法既方便而又不容易搞错。
在列方程时必须要注意这个问题。
∵F 的方向与其作用点的坐标X 的正方向相反,∴F 取负而δX B 取正,∴此力的虚功为负的,即:0=--C B y mg x F δδ……①,由于虚功方程中的两个虚位移不是相互独立的,∴我们还需要将它们化成独立变量,然后才能令独立虚位移前的乘数等于零,从而求出最后的结果。
虚功原理
§2、虚功原理上次课主要是介绍了分析力学中经常要用到的一些基本概念,并由虚功的概念和理想约束的概念导出了解决静力学问题的虚功原理:0=⋅∑i r i F δ。
虚功原理适用的范围是:质点组,它适用的前提条件是只受理想约束。
这次课就举一些具体例子,使我们能够了解如何利用虚功原理去解决静力学问题。
三、应用虚功原理解题:例1、如图所示,有一质量为m ,长度为 的刚性杆子,靠在墙上,在与地面接触的B 端上受一水平向左的外力F ,杆子两端的接触都是光滑的,当杆子与水平地面成α角时,要使杆子处于平衡状态,问作用在杆子B 端上的力F 有多大?求F =?解:由题意可知它是一个静力学问题,而且接触都是光滑的,显然可以应用虚功原理来求解这个问题。
这个例子很简单,简单的题目往往能够清楚地说明物理意义,为了说明虚功原理的意义,如果一开始就举复杂的例子,由于复杂的数字计算将会掩盖物理意义,所以就以这个简单的例子来看看如何应用虚功原理来解出它。
第一步当然也是确定研究对象,即①选系统:在这个例题中,我们就取杆子为应用虚功原理的力学系统。
②找主动力:作用在我们所选取的系统上的主动力有几个?有两个。
一个是水平作用力F ,还有一个是重力m g 作用在杆子的质心上。
因为杆子两端A 、B 处的接触是光滑的,∴在该两处的约束力也就不必考虑。
③列出虚功方程:主动力找出来以后,视计算方便起见,适当选好坐标,并根据虚功原理列出虚功方程。
现在选取如图所示的直角坐标,于是我们现在就可列出系统的虚功方程。
列虚功方程时,正、负号是个很重要的问题,如果按虚位移的实际方向与力的方向间的关系确定虚功的正负号,很容易弄错。
为了不容易弄错,我们还是按力的作用点的坐标的正方向与力的方向间的关系来确定虚功的正负号。
这种方法既方便而又不容易搞错。
在列方程时必须要注意这个问题。
∵F 的方向与其作用点的坐标X 的正方向相反,∴F 取负而δX B 取正,∴此力的虚功为负的,即:0=--C B y mg x F δδ……①,由于虚功方程中的两个虚位移不是相互独立的,∴我们还需要将它们化成独立变量,然后才能令独立虚位移前的乘数等于零,从而求出最后的结果。
虚功原理(微分形式的变分原理)

代入虚功原理中, 代入虚功原理中,有
∂V ∑ ∂q δqα = 0 α =1 α
s
即, δV = 0
虚功原理(微分形式的变分原理) §7-3 虚功原理(微分形式的变分原理)
三、虚功原理的应用
例题3 如图所示, 匀质杆OA, 质量为 1, 长为 1, 能在 质量为m 长为l 例题 如图所示 匀质杆 转动, 竖直平面内绕固定的光滑铰链 O转动 此杆的 A端 转动 端 用光滑铰链与另一根质量为m 长为 长为l 用光滑铰链与另一根质量为 2,长为 2的匀质杆 AB r 相连. 求处于静平衡时, 相连 在 B端有一水平作用力 .求处于静平衡时 两 端有一水平作用力 求处于静平衡时 F 杆与铅垂线的夹角ϕ1和 ϕ2. 1、判断约束类型 、 x O 是否完整约束?是否理想约束 是否理想约束? 是否完整约束 是否理想约束 ϕ 1 l1 2、判断自由度 、 l2 A A 、 B 两点的位置,4个变量 两点的位置,
q1 = ϕ1 , q2 = ϕ 2
r r r r ∂r3 r ∂r1 r ∂r2 +F⋅ Q1 = m1 g ⋅ + m2 g ⋅ l1 ∂ϕ1 ∂ϕ1 ∂ϕ1 y1 = 2 cos ϕ1 ∂x ∂y ∂y = m1 g 1 + m2 g 2 + F 3 l2 ∂ϕ1 ∂ϕ1 ∂ϕ1 y 2 = l1 cos ϕ1 + cos ϕ 2 2 1 = − m1 gl1 sin ϕ1 − m2 gl1 sin ϕ1 + Fl1 cos ϕ1 x3 = l1 sin ϕ1 + l 2 sin ϕ 2 2 =0
广义平衡方程
虚功原理(微分形式的变分原理) §7-3 虚功原理(微分形式的变分原理) 所满足的方程: 可求出系统处于静平衡时ϕ1,ϕ2所满足的方程
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
匀质杆AB始终在平面内,A端靠在墙上,B端在一光滑曲面上,如图所示。
若无论B在何处杆均受力平衡,求曲面方程。
如图所示,四根相同的长度为l的光滑轻杆由铰链连接成菱形,一轻绳系在两对角线之间,下部挂一重量为P的重物,系统放置于两根等高相距为2a(2a<2l)的杆上,求绳中的张力?(φ角已知)
如图所示,一竖立在竖直平面内的半圆空心管,管内刚好装有2n个光滑小珠子,已知每个珠子重力为W,求第i个珠子与第i+1个珠子的作用力Ni。
如图所示,一个外半径为R1,内半径为R2的圆柱形电容器,竖直地插进相对介电常数为εr 的密度为ρ的电解液中,若将电容器接上电压为U 的电源,求电解液中液面上升的高度
第一题,常规做法用受力分析,建立水平竖直方向平衡方程,暴力解之。
(约束力合力沿法向)
能量方法,利用随遇平衡,势能V 恒不变,解得y=f(x)。
(具体见高妙)
虚功原理:因为此题为理想约束,主动力为重力,虚位移中主动力做功为0,即 P δyc=0 yc=常量
由几何关系:yc=y+22
2
1x l - 故yc=y+
22
2
1x l -=常量 因x=0时y=0,故常量=2
1
故y=21⎥⎥⎦
⎤⎢⎢⎣⎡⎪
⎭⎫ ⎝⎛--2x 11l
第二题,直接虚功原理……
建立如图所示坐标系,把绳子忽略,于是两个拉力变为主动力T ,另一个主动力为P ,约束为理想约束,则有:
x A =lsin ϕ ϕδϕδcos x l A =………………………………………..①
ϕ
δϕ
ϕδϕϕδϕ2
sin sin 2cot cos 2a
l y a l y P P +-=-=……………….②
由虚功原理得:-2T P A P y x δδ+=0 将①②代入,得T=P ⎪
⎪⎭
⎫
⎝⎛
-ϕϕϕtan cos sin 22l a
第三题
设任意珠子的球心到管的圆心为OO ’长度为R ,前面i 个球为系统质心为C ,设CO 长度为
L 。
由虚功原理:N ()θθθθαd Wd L iWd d R cos i sin cos i == 其中α=n
4π
即N α
θ
cos cos i R iWL =
现在的目的就是求质心的位置函数L 和θ 由对称性已知角度θ=
ααi i =22
1
求L 用旋转矢量,如图所示
I 个大小为mR 、方向一次相差角度2α的矢量和的大小应该为imL 有:()()α
αααsin sin sin sin 22
imL i i R L i mR ==即
代入N 的表达式得:
()()()()W n n i i i W R i i i P iW
R iWL N i ⎪⎪⎪⎪⎭⎫ ⎝
⎛
=
==
=
2sin 2sin cos sin cos sin cos cos sin sin cos cos ππααααααααα
θ
第四题
为了求液面上升高度,就得求液体所受电场力。
先求出电容:设单位长度电容带电为λ,则离轴线r 处电场强度为E=
r
20πελ
内外筒电势差为U=⎰
⎰==
1
2
2
100ln 22R R
R R dr r Edr πελ
πελ 单位长度电容为C 0=
⎪⎪⎭
⎫ ⎝⎛=
210
ln 2R R U
πελ 若有电解质,则C 0’=
⎪⎪⎭
⎫ ⎝⎛21r
0ln 2R R επε 设电容器长为L ,其中有长度为x 的电解液,则电容器电容为C=xC ()()2
1
000ln ]
1[2x 'R R L x C L r +-=
-επε
电容储存电场能为22
1
CU E =
设电解液受力为F (方向向上)
,假设电解液在F 作用下向上移动dx ,由虚功原理得Fdx=dE=d ()()21022
/ln dx 122)21(R R U CU r -=επε
得F=()()
2102/ln 122R R U r -επε
液面上的电解液受力平衡:F=(
)
2
221g R R h -πρ
得h=
(
)
()
()
2102
22
12
/ln 1g R R R R U r --εερ。