车联网功能应用测试软件平台
车联网车辆道路测试方案

一、车联网车辆道路测试方案1.定义测试目标车联网车辆道路测试的目标是确保车联网车辆能够安全、高效、可靠地在道路上行驶,并且能够与其他车辆和行人安全协作。
2.测试环境测试环境要求包括:道路类型、道路状况、交通流量、道路标志、路灯、交通控制装置等。
3.测试内容(1)车辆控制系统测试:对车辆的控制系统进行测试,确保车辆能够在道路上安全高效地行驶。
(2)道路环境测试:对道路环境进行测试,确保车联网车辆能够正确识别道路环境,并能够根据道路环境采取相应的行驶策略。
(3)车辆安全测试:对车辆的安全系统进行测试,确保车辆能够正确识别道路上的其他车辆和行人,并能够采取相应的安全措施。
(4)网络连接测试:对车联网车辆的网络连接进行测试,确保车辆能够正确接收和发送信息,以实现与其他车辆和行人的安全协作。
4.测试方法(1)现场测试:在实际的道路环境中,对车联网车辆进行实际的测试,以确保车辆能够在道路上安全高效地行驶。
(2)仿真测试:使用仿真软件对车联网车辆进行模拟测试,以确保车联网车辆能够在复杂的道路环境下安全高效地行驶。
(3)实验室测试:将车联网车辆的各个组件和系统拆下来,在实验室中进行测试,以确保车联网车辆的各个组件和系统能够正常工作。
5.测试结果在车联网车辆道路测试中,测试结果包括:车辆的行驶状态、行驶路线、行驶速度、控制系统的响应等。
根据测试结果,可以对车联网车辆进行性能分析,以确保车联网车辆能够安全、高效、可靠地在道路上行驶。
6.测试安全在车联网车辆道路测试中,为了确保测试安全,必须遵循以下几项原则:(1)遵守交通规则:严格遵守交通规则,确保车联网车辆能够安全、高效地行驶。
(2)安全驾驶:严格执行安全驾驶规则,确保车联网车辆能够安全、稳定地行驶。
(3)遵守环境法规:严格遵守环境法规,确保车联网车辆能够在安全、环保的环境下行驶。
(4)确保安全:在测试过程中,应采取必要的安全措施,确保测试人员和其他行人的安全。
7.总结车联网车辆道路测试是确保车联网车辆能够安全、高效、可靠地在道路上行驶的重要环节,为此,应当按照上述测试方案,结合现场测试、仿真测试和实验室测试,综合考虑道路环境、车辆控制系统、车辆安全系统和网络连接等因素,以确保车联网车辆能够在道路上安全高效地行驶。
如何进行车联网应用的性能测试

如何进行车联网应用的性能测试一、引言车联网已经成为现代汽车行业的重要发展方向,各种智能化的车载应用也层出不穷。
为确保这些车联网应用的稳定性和性能,进行性能测试是必不可少的环节。
本文将介绍如何进行车联网应用的性能测试,以确保车联网应用在实际使用中的良好性能。
二、性能测试的重要性性能测试是一种用于评估系统在特定负载下的运行情况的测试方法。
对于车联网应用来说,性能测试具有以下重要性:1. 确保稳定性:性能测试可以测试应用在高负载情况下的稳定性,以防止应用在实际使用中出现崩溃或卡顿等问题。
2. 优化性能:性能测试可以帮助发现应用中存在的性能瓶颈,并提供优化建议,提高应用的效率和响应速度。
3. 用户满意度:车联网应用通常涉及到用户的安全和便利,性能测试可以保证用户在使用应用时的良好体验,提高用户满意度。
4. 节约成本:在应用上线之前进行性能测试,可以及时发现潜在问题并解决,避免因性能问题导致的返工和额外的成本投入。
三、性能测试的关键步骤进行车联网应用的性能测试,可以按照以下步骤进行:1. 确定测试目标:明确性能测试的目标是什么,例如测试应用在多少并发用户下的表现,或者测试应用在高负载情况下的稳定性。
2. 设置测试环境:创建一个与实际使用环境接近的测试环境,包括硬件设备、网络环境等。
3. 设计测试场景:根据测试目标设计多种测试场景,例如模拟多用户登陆、模拟高速行驶等。
4. 配置测试工具:选择合适的性能测试工具,并根据测试场景进行工具的配置。
5. 运行测试脚本:使用测试工具运行测试脚本,模拟实际使用情况下的负载。
6. 监控和分析数据:在测试过程中,实时监控系统的性能数据,并进行分析,以了解系统的表现和潜在问题。
7. 评估测试结果:根据性能测试的数据和分析结果,评估应用的性能,发现问题并提出解决方案。
8. 优化和再测试:根据评估结果进行优化,并再次进行性能测试,直到达到预期的性能指标为止。
四、性能测试工具推荐选择合适的性能测试工具对于车联网应用的性能测试也非常重要。
T-Box功能自动化测试

案例分享| T-Box功能自动化测试方案背景T-Box是实现汽车车联网的一个关键环节,从起初单纯的实现车辆信息采集,已发展到具有车辆信息监测及信息交互(V2X)、车辆远程控制、安全监测和报警、远程诊断、边缘计算等多种离线和在线的应用功能的载体。
为保障T-Box功能的正常运转,对其进行功能测试就尤为重要。
T-Box作为“边缘节点”,与车内控制器通过传统总线或车载以太网进行信息交互,与车外TSP(Telematics Service Platform)通过蜂窝基站无线技术进行信息交互。
从测试实现的角度,针对T-Box功能测试而言,由于自动化测试所需的“Input仿真”与“Output监测”的闭环存在一定难度,故基本通过手动或半自动化的传统方式进行测试,依靠“人在环”方式记录测试数据以及判断测试结果。
但该方式测试效率低且覆盖度受限,难以满足研发的快速迭代和深度验证的要求。
本文将介绍一种实现T-Box部分功能(与移动终端交互的功能)的自动化测试技术路径以及相关测试经验与大家分享。
测试对象和原理分析T-Box与手机移动端的主要交互功能如下:图1 T-Box与手机端主要交互功能内容车内T-Box与手机端的交互流程如下:图2 车内T-Box与手机端交互流程以车主希望能够通过手机中的APP查询到车辆当前的状态信息为例:●车辆通过卫星获取位置信息●车内T-Box通过传统总线或车载以太网获取车辆当前状态信息●车内T-Box通过蜂窝基站将信息传递给TSP服务器●TSP服务器通过蜂窝基站将数据传递到车主手机APP中从T-Box与手机端交互流程来分析,要实现T-Box功能自动化测试,需要以T-Box为中心搭建由T-Box车内交互平台(车内网络)与T-Box车外交互平台(TSP)而组成的闭环系统。
其中T-Box与车内交互可通过总线仿真与监测来实现,而T-Box与TSP交互的无线信号仿真较困难。
但是测试T-Box功能的最终目的是验证APP的触发、显示与T-Box功能逻辑是否满足要求。
车联网车辆道路测试方案

车联网车辆道路测试方案
车联网车辆道路测试方案主要包括以下几个方面:
1. 道路环境测试:对车辆进行实际道路行驶测试,包括城市道路、高速公路和乡村道路等不同路况的测试,检验车辆在各种道路环境下的性能表现。
测试过程中可以记录车辆的行驶速度、加减速度、急刹车等数据,评估车辆在不同道路环境下的稳定性和安全性。
2. 车辆通信测试:测试车辆与基础设施之间的通信性能,包括车辆与交通信号灯、路边传感器、云平台等的通信能力。
测试过程中可以模拟不同通信场景,验证车辆与基础设施之间的数据传输速度、稳定性和准确性。
3. 车辆自动驾驶测试:针对车辆的自动驾驶功能进行测试,包括自动巡航、自动泊车和自动变道等功能的测试。
测试过程中可以模拟不同场景,如交通拥堵、施工区域和紧急情况等,评估车辆在各种复杂交通环境下的自动驾驶能力。
4. 数据安全性测试:测试车辆的数据安全性,包括车辆与网络之间的数据传输安全、车辆内部数据存储的安全性等。
测试过程中可以模拟黑客攻击、数据泄露等场景,评估车辆的数据安全性和防护能力。
5. 用户体验测试:测试车辆的用户体验,包括车辆操作界面的友好性、交互响应速度、语音识别准确性等。
测试过程中可以邀请用户参与,收集用户反馈意见,优化车辆的用户体验。
以上是车联网车辆道路测试方案的主要内容,具体的测试流程和方法可以根据具体需求进行调整和完善。
同时,测试过程中需要严格遵守道路交通规则和安全要求,确保测试过程的安全性和准确性。
宝沃汽车车联网海外测试用例V1.0(1) - APP体验用户用例-APP车主用例
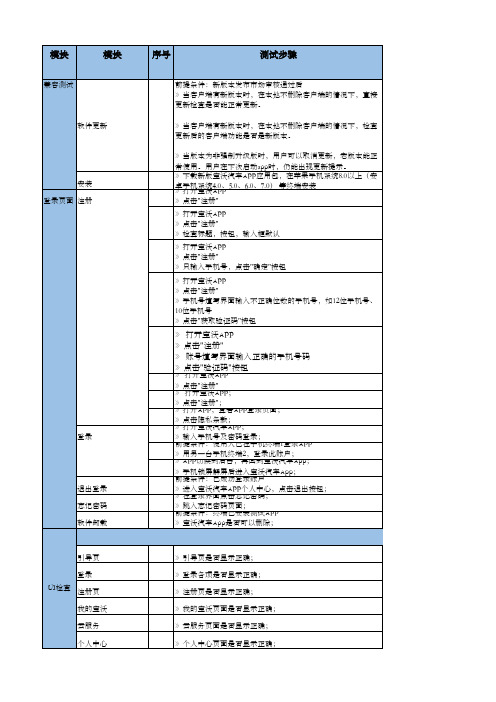
登录
退出登录 忘记密码 软件卸载
引导页
》引导页是否显示正确;
UI检查
登录 UI检查 注册页 我的宝沃 云服务 个人中心
》登录各项是否显示正确; 》注册页是否显示正确; 》我的宝沃页面是否显示正确; 》云服务页面是否显示正确; 》个人中心页面是否显示正确;
车况
》我的宝沃首页剩余油量和总里程显示正确,进入车况查询 界面,仪表页/四门两盖/胎压界面显示正确; 》进入车况查询界面,点击刷新,数据显示正确;
车辆诊断
》车辆未有异常,进入车辆诊断页面,未发现异常; 》车辆有异常,进入车辆诊断页面; 》点击刷新按钮可以正常获取到最新的车辆诊断数据; 前提条件:车辆位置上报关闭 》点击导航到车,; 前提条件:车辆位置上报开启 》进入app,点击导航到车,进入导航到车页面 前提条件:车辆位置上报开启 》进入app,点击导航到车,进入导航到车页面 前提条件:车辆位置上报开启 》进入app,点击导航到车,进入导航到车页面 》点击导航到车,开启GPS,路径规划完成后点击导航到 车,根据导航路线行走,位置信息可以正常更新; 》进入一键寻车界面,点击开始寻车。再点击停止寻车; 》发送到车界面,点击输入框,搜索任意地址,然后发送到 车; 》发送到车界面,点击输入框,搜索任意地址,然后点击搜 周边按钮,搜索周边任意内容。然后发送到车; 前提条件:进入发送到车 》点击收藏、搜索周边、发送到车; 》打开车窗远程控制,输入正确/错误数字PIN码;执行完成后,点击操作历史查看; 》关闭车窗远程控制,输入正确/错误数字PIN码。执行完成后,点击操作历史查看; 》打开座椅加热远程控制,输入正确/错误数字PIN码。执行完成后,点击操作历史查看; 》关闭座椅加热远程控制,输入正确/错误数字PIN码。执行完成后,点击操作历史查看;
车联网(Telematics)测试技术及应用案例分析
车联网-Telematics测试技术及应用案例分析【摘要】文章系统阐述了车联网(Telematics)系统测试的一般流程及主要测试方法。
通过具体Telematics系统测试实例详细介绍测试过程中关键技术应用、主要测试问题及其原因分析并取得了较好的测试结果。
Telematics后台信息应用服务平台为问题高发区,车载终端问题主要为本地功能无法实现,无线通信网络问题为小概率事件。
另外,在测试过程及时截取并准确分析log文件可以高效定位问题根源,提高测试效率。
1 车联网Telematics概念1.1定义车联网是以车内网、车际网和车载移动互联网为基础,按照约定的通信协议和数据交互标准,在车-X(X:车、路、行人及互联网等)之间,进行无线通讯和信息交换,以实现智能化交通管理、智能动态信息服务和车辆智能化控制的一体化网络,是物联网技术在交通系统领域的典型应用。
1图1 Telematics系统架构车载信息终端:采集CAN网络数据及GPS数据等信息,经过处理打包,通过无线通信网络传送给后台信息服务平台。
无线通信网络:应用3G/4G、Wi- Fi等现代网络通信的技术与手段,实现车载终端与后台服务平台的信息传输。
后台信息服务平台:借助互联网技术整合第三方内容和数据并对海量信息进行融合处理,以实现车辆检测、道路救援、实时交通、网上预约等服务与应用。
2 Telematics测试技术2.1 Telematics系统特点车载信息终端集成多种通信与数据IO硬件,并提供对多种通信协议、数据处理及应用服务的支持,系统非常复杂。
Telematics具有多设备组成性,涉及众多厂商,信息数据流转链路复杂、网络异构且涉及海量信息整合,数据挖掘、大规模数据计算。
实时性、可靠性要求:网络节点(车辆)具有高动态性、拓扑变化频繁,且受到的干扰因素较多包括路边建筑物、天气状况、道路交通状况等。
2.2 Telematics测试方法Telematics系统的复杂性决定了测试过程必需从多角度、多维度对系统进行综合性测试,主要测试技术如图所示,图2 Telematics测试方法从系统整体实现角度出发,需要进行功能、及性能测试。
V2X-HIL测试方案
V2X-HIL测试方案目录1.系统架构 (3)1.1.系统架构 (3)1.2.功能架构 (3)2.子系统设计与说明 (4)2.1.C-V2X 仿真测试软件 (4)2.2.C-V2X 自动化测试管理系统 (12)2.3.C-V2X 应用场景测试过程演示系统 (23)2.4.C-V2X 场景基础库 (25)2.5.C-V2X 测试辅测机及测试软件 (33)2.6.GNSS模拟器 (35)2.7.HIL机柜及交换机 (38)1.系统架构1.1.系统架构整个系统测试由2大块组成,测试系统以及外围设备。
系统架构图如下图所示:V2X 综合测试仪:主要包括HIL场景测试系统以及协议一致性测试系统。
其中HIL场景测试系统可生成3D仿真场景,支持生成车辆模型、道路模型、导入路网等功能;自动化测试工具支持场景的管理的创建、测试用例的管理、测试用例执行和测试报告的生成等功能;协议一致性测试系统可对被测件执行网络层、消息层、安全层的协议一致性测试系统;外围设备管理,可管理机柜、C-V2X测试辅测机、GNSS 信号源等外围设备。
1.2.功能架构系统功能架构,如下图所示:2.子系统设计与说明2.1.C-V2X 仿真测试软件本项目采用VTD构建C-V2X仿真测试软件。
Virtual Test Drive (VTD)复杂交通环境视景建模、仿真软件由德国的 VIRES 公司开发,该公司成立于 1996 年,VIRES 的产品主要是针对交通领域实时视景系统的应用而开发,包括汽车、轨道交通及航空领域,其中汽车主动安全的复杂交通视景系统开发是 VIRES VTD 最重要的应用方向,并已在奥迪、宝马及奔驰应用在各自的驾驶模拟器的交通场景开发中。
VTD 提供了一套从道路设计到仿真框架的完整工具链,支持标准设计,使用开放标准(OpenDRIVE,OpenCRG etc.),支持实时仿真,如在 SIL/DIL/VIL/HIL 环境下评估高级驾驶员辅助系统(ADAS)、主动安全系统(active safety systems),内置多种传感器模型,能够为智能驾驶提供逼真的场景和传感器,主要针对复杂的实时交通环境实现视景仿真应用,在 Linux 系统中运行,高度模块化,是一款非常灵活的软件,支持视景实时渲染能力强,渲染稳定。
车载测试中的车联网和智能交通系统验证方法

车载测试中的车联网和智能交通系统验证方法车联网和智能交通系统是近年来快速发展的领域,它们的验证方法对于确保测试的准确性和可靠性至关重要。
本文将探讨车载测试中常用的车联网和智能交通系统验证方法,以及它们的应用。
一、数据对比验证数据对比验证是车载测试中最常用的一种验证方法。
它的原理是将传感器获取的数据与实际情况进行对比,以验证系统的准确性。
具体流程如下:1. 数据采集:通过车载传感器采集车辆周围的各种数据,包括环境信息、车辆状态、交通信号等。
2. 数据处理:将采集到的数据进行预处理,包括数据滤波、数据纠正等,以确保数据的准确性和一致性。
3. 实际情况获取:通过其他手段获取车辆周围的实际情况,比如通过摄像机、雷达等设备进行实时监测。
4. 数据对比:将处理后的数据与实际情况进行对比,分析两者之间的差异。
如果差异在可接受范围内,则系统验证通过;如果差异较大,则需要进行进一步优化或修正。
二、仿真验证仿真验证是车载测试中常用的一种验证方法,它通过建立虚拟环境,模拟车辆行驶和交通情况,验证车联网和智能交通系统的性能和可靠性。
具体流程如下:1. 建立仿真环境:选择适当的仿真软件或平台,建立虚拟环境。
这包括建立交通网络、道路拓扑结构、车辆模型等。
2. 输入真实数据:通过车载传感器采集的真实数据作为仿真输入,确保仿真的真实性和准确性。
3. 进行仿真实验:在建立好的仿真环境中进行实验,模拟车辆行驶过程、交通信号变化等。
4. 分析仿真结果:根据仿真结果对车联网和智能交通系统进行性能和可靠性评估。
如果仿真结果符合预期,则系统验证通过。
三、实地验证实地验证是车载测试中最直接和真实的验证方法,它通过在实际道路上进行测试,验证车联网和智能交通系统的性能和可靠性。
具体流程如下:1. 选择测试场景:根据要验证的系统功能,选择适当的实地测试场景,包括城市道路、高速公路等。
2. 设置测试参数:确定测试的具体参数,包括车辆速度、路况、交通信号等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
车联网功能应用测试软件平台本平台由车载音视频监控DVR及硬盘、网络与电力辅助设备配件、车联网功能应用测试软件平台系统组成。
集成国家智能交通综合测试基地已有车联网路侧测试设备,支撑测试场景设计与实施,实现车联网测试状态实时监控与结果分析。
1.车联网功能应用测试软件平台功能(一)用户管理1、实名认证。
软件平台需能够对注册人提供的身份信息进行实名认证;2、短消息验证。
软件平台需提供短消息验证功能,至少支持4位短信验证码;3、密码格式检查。
软件平台需对登录密码进行格式检查(须包含至少1个大写字母、至少1个小写字母、至少1个数字、至少1个特殊符号,密码长度为12~20个字符);4、双重验证。
软件平台在注册用户登录时,要求用户首先输入用户名和密码,而后需通过短消息进行双重验证,验证通过后,方可使用软件平台;5、新建用户。
新建并自主添加测试管理用户、测试用户的相关信息(用户名、密码、联系方式、身份信息、角色等);6、列表显示。
列表显示测试管理用户和测试用户的基本信息(用户名、密码、联系方式、身份信息、角色等);7、信息编辑。
删除、更新与用户相关信息(用户名、密码、联系方式、身份信息、角色等);8、列表查询。
用户列表可通过默认条件或自定义条件,如姓名、身份证号、联系方式、角色等进行筛选;9、角色信息。
新建、更新、删除角色的相关信息(角色名称、角色权限等);10、用户角色。
激活、冻结、删除用户角色及相应权限;11、页面权限。
不同角色用户是否具备进入/浏览某页面的权限;12、操作权限。
不同角色用户具备进入/浏览某页面的权限后,是否具备对该页面进行操作的权限;13、数据权限。
不同角色用户是否针对某些数据具备浏览权限;14、用户分为管理用户、测试管理用户和测试用户三种类型:管理用户:对注册用户进行增加、删除、查询、信息修改、用户激活及权限修改等操作;测试管理用户:负责软件平台的设备管理和测试用例的维护,包括测试设备和测试用例的增加、删除、信息查询及修改操作;负责测试文档的维护、撰写与更新;负责测试管理工作,包括测试计划的制订、软件平台及设备的使用、测试进程中的各项管理工作;测试用户:需注册并激活后使用软件平台;提交待测试相关信息,申请测试,并在测试过程中配合测试管理用户工作。
(二)设备管理1、测试设备信息管理。
测试设备信息需包括但不限于:设备类别、设备编号、设备型号、设备厂商;购买时间、安装位置、IP地址、软件版本号、关联基础设施编号;关联测试设备;关联测试协议;2、待测设备信息管理。
待测设备信息需包括但不限于:设备类别、设备编号、设备型号、设备厂商;测试时间、测试地点、测试管理人员、测试参与人员、测试项目;关联测试设备;关联测试协议;3、信息管理。
列表显示测试设备与待测设备基本信息,并可对测试设备与待测设备详细信息进行编辑操作,包括设备信息的增加、修改或删除;4、列表查询。
设备列表可通过默认条件,如设备类型、设备厂商、安装位置等或通过自定义条件进行设备筛选;5、状态查询。
实时查询测试设备和待测设备的在线状态,以确定设备是否处于可连接状态;实时查询测试设备和待测设备的运行状态,以确定设备各测试进程是否工作正常;实时查询测试设备和待测设备的占用状态,以确定是否可以调用设备进行相关测试;6、链路层指标测试管理。
连接V2X前端设备(DSRC或C-V2X),符合“V2X链路测试控制协议”和“V2X链路测试数据传输协议”,通过软件平台控制V2X前端设备进行链路层指标测试;7、一致性测试管理。
连接网络层一致性测试设备,符合“V2X 网络层一致性测试控制协议”和“V2X网络层一致性测试数据传输协议”,通过软件平台控制网络层一致性测试设备进行网络层一致性测试;连接消息层一致性测试设备,符合“V2X消息层一致性测试控制协议”和“V2X消息层一致性测试数据传输协议”,通过软件平台控制消息层一致性测试设备进行消息层一致性测试;8、安全测试管理。
连接V2X前端设备(DSRC或C-V2X),符合“V2X安全测试控制协议”和“V2X安全测试数据传输协议”,通过软件平台控制V2X前端设备进行安全协议测试;9、交通控制信号模拟管理。
连接交通控制信号模拟设备和V2X 前端设备(DSRC&C-V2X),符合“交通控制信号模拟测试控制协议”和“交通控制信号测试数据传输协议”,通过软件平台控制交通控制信号模拟设备进行交通控制信号配置、采集、模拟和传输;10、CAN总线模拟管理。
连接CAN总线模拟设备和V2X前端设备(DSRC&C-V2X),符合“CAN总线模拟测试控制协议”和“CAN 总线测试数据传输协议”,通过软件平台控制CAN总线模拟设备进行CAN总线数据统计信息采集或CAN总线模拟数据传输;11、GNSS信号模拟管理。
连接GNSS信号模拟设备和V2X前端设备(DSRC&C-V2X),符合“GNSS信号模拟测试控制协议”和“GNSS信号模拟测试数据传输协议”,通过软件平台控制GNSS信号模拟设备进行NMEA数据采集或NMEA模拟数据传输;12、雷达+视觉传感数据采集管理。
连接毫米波雷达+视觉传感器、激光雷达+视觉传感器,符合“测试数据传输协议”,对车辆周边或道路状况进行感知,通过软件平台控制采集数据传输;13、测试控制管理。
连接所有测试设备与待测设备,符合“测试控制协议”,通过软件平台向测试设备下发测试配置、控制命令,监测测试设备与待测设备工作状态;14、数据传输管理。
连接所有测试设备与待测设备,符合“测试数据传输协议”,通过软件平台采集测试设备的日志信息、事件信息、测试结果、错误信息等或发送模拟数据信息;15、日志查询。
基于时间、测试实例、特征条件、错误信息、的运行日志查询,基于时间的维护、升级、设备配置日志查询。
16、远程维护。
对测试设备进行远程访问、重启等;对测试设备进行远程配置和软件升级;(三)测试管理1、数字地图。
支持接入测试场地电子地图;支持在电子地图中自定义测试路段相关信息;支持自定义路侧设备及车辆状态信息的2D显示;支持自定义面向电子地图的数据接口;2、示例管理。
新建并自主添加、删除、更新测试示例相关信息,列表显示测试示例的相关信息(示例名称、测试内容、关联设备、关联协议等),可根据自定义条件进行筛选;3、实例管理。
新建并自主添加删除、更新测试实例相关信息(测试编号、测试时间、测试地点、参与人员、关联设备、关联协议、测试目标、关联文档等);列表显示测试实例的相关信息4、API管理。
新建并自主添加、修改或删除、显示测试需要的API接口。
5、流程控制。
具备测试启动、测试暂停、测试恢复。
测试中止功能。
6、状态监控。
提供与外场路侧相关设备、外场车辆相关设备、实验室模拟测试相关设备、待测设备的状态监控。
状态监控的实时数据应能够对流程控制产生自动化介入。
(四)数据分析1、系统测试过程回放。
软件平台可针对单个设备、实例关联设备组合或自定义设备组合进行过程回放(时间、轨迹、事件等)。
2、路侧设备数据回放。
提供与外场路侧相关设备的数据回放,包括定位数据回放、PC5/DSRC数据回放、路侧传感器数据回放、毫米波雷达+视觉传感器数据回放、激光雷达+视觉传感器数据回放、道路环境感知数据回放、交通信号控制机数据回放;3、模拟设备数据回放。
提供与实验室模拟测试相关设备的数据回放:定位模拟设备数据回放、交通信号模拟设备数据回放、CAN总线模拟设备数据回放、测试控制系统数据回放;4、车载设备数据回放。
提供与外场车辆相关设备的数据回放:定位数据回放、PC5/DSRC数据回放、车载传感器数据回放、毫米波雷达+视觉传感器数据回放、激光雷达+视觉传感器数据回放、CAN总线数据回放;5、待测设备数据回放。
提供待测设备的数据回放:定位数据回放、PC5/DSRC数据回放、CAN总线数据回放、测试事件数据回放;6、数据分析。
以数据、图表等方式提供测试设备和待测设备的状态、错误信息分析结果;以数据、图表等方式提供待测设备的测试指标、测试完成度情况分析结果;(五)文档管理1、测试标准文档管理。
单个或批量导入、更新、删除、筛选与测试相关的标准文档;2、测试示列文档管理。
新建并自主添加、删除、更新测试示例相关文档(示例基础信息、测试内容、关联设备、关联协议等),可建立示例与设备、协议等文档的自主关联;3、测试设备文档管理。
新建并自主添加、更新、删除测试设备相关文档(测试设备规格书、测试设备使用手册、测试设备排错手册等);基于标准、示例、设备、协议的关联关系跳转到相应文档;4、测试协议文档管理。
新建并自主添加、更新、删除测试协议相关文档(测试接口API手册、测试接口排错手册等);基于标准、示例、设备、协议的关联关系跳转到相应文档;5、邮件列表。
具备公告发布、发起讨论、信息审核、列表订阅功能6、采用开源Wiki管理架构构建服务。
2.配套设备(六)车载音视频监控DVR及硬盘✓支持八路HDTVI相机;✓图像分辨率:720P/960H/DI/CIF✓IPC混合接入,具备高清视音频编解码;✓4G/WIFI无线网络传输;✓卫星定位;✓数据安全存储;✓硬盘:支持最高2T的拓展功能;✓减振保护;✓报警输入输出;✓行车信息采集;✓支持扩展串口外设接入。
✓支持T/CSAE 53-2017消息数据接口,提供符合T/CSAE 53-2017消息编解码函数库;✓支持DSMP数据接口,提供符合DSMP数据封装/解封装函数库。
(七)网络与电力辅助设备配件➢口千兆交换机✓24个10/100/1000Base-T以太网端口,4个100/1000SFP.4个千兆SFP。
2个QSFP+堆叠口;✓交流供电,电源前置,支持RPS冗余电源✓交换容量不少于598G、包转发率不低于168Mbps✓支持远程点灯,支持TWAMP双向主动测量协议,✓支持IPV4/IPV6双协议栈,✓额定电压100-240V,50/60Hz,工作温度:0-45℃,相对湿度5%-95%,业务端口防雷能力:≥8KV。
➢路侧POE供电交换机;✓8个10/100/1000BASE-T以太网端口,4个端口支持POE;✓交流供电,内置180w AC电源;✓包转发率12Mbps,交换容量16Gbps➢16口KVM切换器✓集液晶显示器,键盘、鼠标、切换器功能于一体✓支持分辨率1280*1024高清级别✓工作温度:-45-60℃➢4口千兆企业级光猫;✓电源适配:100-240V AC 50-60Hz;✓支持接口:PON接口和以太口;✓三层特性:PPPoE/静IP/DHCP/DHCP OPTION66;✓支持IPV6✓虚拟口支持多网段地址及路由转发✓工作环境温度:-40-55℃➢市电转24V供电转换器;✓输入电压:AC 100-240V,输出电压:DC-24v,输出电流2.5A,输出功率60w;2、工作温度:-10-65℃(八)机箱(壁挂式或抱杆式)✓铁质,表面喷漆,加厚防水设计/2✓尺寸:≥499*500*200MM✓防雷击接地处理,内置层板。