雷达原理第三章
雷达对抗原理 习题答案
有源
Ex1-4 解: τ 时间内到达的脉冲数为: ∑ nPn (τ )
n= 0 ∞
λ=
n= 0
∑ nPn (τ ) ∑ n
τ =
n =1∞∞( Nhomakorabeaτ ) e n! τ
n
− λτ
重复周期/ms 2 0.8 3 1.2 0.9 3.5
λ = ∑ fri
i =0 N −1
脉冲宽度/ µ s 1.2 1 40 15 3 64
没有特殊说明认为: Pi = 1
7.若将没有雷达信号存在的时间称为寂静时间,该时间的出现概率为寂静概率 Pq ,试求题 六所给信号环境的寂静概率 Pq ;若将同时存在两个或两个以上雷达信号的时间称为交叠时 间,该时间的出现概率为交叠概率 Pc ,试求题六所给信号环境的交叠概率 Pc 。 (提示:任意 时间可分为寂静时间、非交叠时间和交叠时间,三者互斥。 ) ex1-7 解:
分辨率=?r, 要使最高测角分辨率,取 ?r 最小值 12.96 o 。 2.某雷达侦察设备采用全向振幅单脉冲---相邻比幅法测向,天线方向图为高斯函数。试求: (1)由电压失衡、波束宽度误差和波束安装误差所引起的三项系统测向误差是否与信号的 到达方向有关,为什么? (2)对于一个六天线系统,波束交点损耗为 3dB,如果上述三项误差分别为:2dB、7 ° ,1.5° , 试分析系统总的测向误差在哪个方向最小?在哪个方向最大?其误差值分别为多少? (3)在上述同样条件下,如果采用四天线,波束交点损耗仍为 3dB,则最小、最大系统误 差方向有什么变化?误差数值又为多少? Ex3-2 解: (1) dϕ =
雷达系统课后习题和答案

雷达系统课后习题和答案雷达原理习题集第一章1-1.已知脉冲雷达中心频率=3000MHz,回波信号相对发射信号的延迟时间为1000μs,回波信号的频率为3000.01MHz,目标运动方向与目标所在方向的夹角60°,求目标距离、径向速度与线速度。
1-2.已知某雷达对σ= 的大型歼击机最大探测距离为100Km,a)如果该机采用隐身技术,使σ减小到,此时的最大探测距离为多少?b)在a)条件下,如果雷达仍然要保持100Km最大探测距离,并将发射功率提高到10倍,则接收机灵敏度还将提高到多少?1-3. 画出p5图1.5中同步器、调制器、发射机高放、接收机高放和混频、中放输出信号的基本波形和时间关系。
第二章2-1. 某雷达发射机峰值功率为800KW,矩形脉冲宽度为3μs,脉冲重复频率为1000Hz,求该发射机的平均功率和工作比2-2. 在什么情况下选用主振放大式发射机?在什么情况下选用单级振荡式发射机?2-3. 用带宽为10Hz的测试设备测得某发射机在距主频1KHz处的分布型寄生输出功率为10μW,信号功率为100mW,求该发射机在距主频1KHz处的频谱纯度。
2-4. 阐述p44图2.18中和p47图2.23中、的作用,在p45图2.21中若去掉后还能否正常工作?2-5. 某刚性开关调制器如图,试画出储能元件C的充放电电路和①~⑤点的时间波形2-6. 某人工长线如图,开关接通前已充电压10V,试画出该人工长线放电时(开关接通)在负载上产生的近似波形,求出其脉冲宽度L=25μh,C=100pF,=500Ω2.7. 某软性开关调制器如图,已知重复频率为2000Hz,C=1000pF,脉冲变压器匝数比为1:2,磁控管等效电阻=670Ω,试画出充放电等效电路和①~⑤点的时间波形。
若重复频率改为1000Hz,电路可做哪些修改?2.8.某放大链末级速调管采用调制阳极脉冲调制器,已知=120KV,Eg=70V,=100pF,充放电电流I=80A,试画出a,b,c三点的电压波形及电容的充电电流波形与时间关系图。
雷达基本工作原理课件

雷达的分类
01
脉冲雷达
发射脉冲信号,通过测量脉冲 信号往返时间计算目标距离。
02
连续波雷达
发射连续波信号,通过测量信 号频率变化计算目标距离和速
度。
03
合成孔径雷达
利用高速平台对目标区域进行 扫描,形成高分辨率的合成孔
径图像。
雷达的应用
军事侦察
利用雷达探测敌方军事目标,如飞机、 坦克等。
气象观测
指雷达在存在欺骗干扰的情况下,仍能正常工作并检测到目标的能力 ,通常由信号鉴别和抗干扰算法决定。
多目标处理能力
跟踪能力
指雷达在同一时间内能够跟踪的 目标数量,通常由数据处理能力 和硬件资源决定。
分辨能力
指雷达在同一时间内能够分辨的 目标数量,通常由信号处理算法 和天线波束宽度决定。
05
雷达技术的发展趋势
天线是雷达系统的辐射和接收单元,负责发射和接收电磁波。
波束形成是天线的重要技术,通过控制天线阵列的相位和幅度,形成具有特定形状 和方向的波束。
天线的性能指标包括方向图、增益、副瓣电平和极化方式等。
信号处理与数据处理
信号处理是雷达系统的关键技术之一,负责对接收到的回波信号进行处 理和分析。
数据处理负责对雷达系统获取的数据进行进一步的处理、分析和利用。
当目标相对于雷达移动时,反 射的电磁波频率会发生变化, 这种变化被雷达接收并转换为 目标的相对速度。
速度测量的精度受到多普勒效 应的影响,而分辨率则受到雷 达工作频率和采样率的影响。
03
雷达系统组成
发射机
发射机是雷达系统的核心组件之 一,负责产生高功率的射频信号
。
它通常包括振荡器、功率放大器 和调制器等组件,用于将低功率 信号放大并调制为所需的波形。
雷达天线及伺服系统
3.2 天线的分类
• 按工作性质: • 发射天线;接收天线
• 按波长: • 长波天线;中波天线;短波天线;微波天 线等
• 按天线原理: • 线天线;面天线
• 按波束扫描: • 机械扫描;电扫描(相控阵天线)
二、面天线
• 旋转抛物面天线 • 卡塞格伦(Cassegrain)天线
1、旋转抛物面天线
旋转抛物面天线是在通信、 雷达和射电天文等 系统中广泛使用的一种天线, 它是由两部分组成的,
其一:抛物线绕其焦轴旋转而成的抛物反射面, 反射 面一般采用导电性能良好的金属或在其它材料上敷以 金属层制成;
其二:置于抛物面焦点处的馈源(也称照射器)2
λ=波长; A=天线的实际面积; ρe=天线的口 径效率
3.3.5 天线的阻抗
• 天线输入阻抗:Zm=Rm+j*Xm, • 实部:电阻,功率损耗 • 虚部:阻抗,储存功率
• 天线的输入阻抗与发射机的内阻匹配时,可 得到最大输出功率;同理,接收时,接收机 可从天线获得最大输出。
The Cassegrain Antenna
• Advantages • The feed radiator is more easily supported and the antenna is geometrically compact. • It provides minimum losses as the receiver can be mounted directly near the horn.
馈源把高频导波能量转变成电磁波能量并投向抛物反 射面, 而抛物反射面将馈源投射过来的球面波沿抛物 面的轴向反射出去, 从而获得很强的方向性。
雷达气象学之第三章(多普勒天气雷达探测原理和方法)

2、脉冲对处理法(PPP)
在一定假设条件下对每一个距离库内的连 续两个取样值作成对处理.从而获得平均 多普勒频率和频谱宽度。此法优点在于能 实时处理.并且有一定精度,但它不能得 到频率谱。
3、相干记忆滤波器(CMF)处理法
此法只需要一个线路,在不设置距离库的 情况下同时对雷达探测范围内各个距离上 作粗略的谱分析,并能用如PSI(平面切变 线是其)等直接显示出来。但它精度不高;
垂 直 风 廓 线
补充风符号
1.风向杆 表示风的 来向。 2.风羽每 条代表风 速4米/秒, 半条代表2 米/秒,三 角旗代表 20米/秒。
谱 宽
反 射 率
三、影响速度谱宽的气象因子
• 多普勒速度谱宽表征着有效照射体内不同 大小的多普勒速度偏离其平均值的程度, 实际上它是由散射粒子具有不同的径向速 度所引起的。对气象目标物而言,影响速 度谱宽的主要因子有四个:
• 显然,雷达有效照射体中粒子直径的差别 越大,由此造成的多普勒速度谱越宽。
• 因此速度的谱宽实际上也取决于降水粒子 的谱分布。
• 当雷达水平探测时,粒子的下落末速度在 雷达波轴上的径向分量为零,所以它对多 普勒速度谱宽没有任何影响。
• 而当雷达垂直指向探测时,粒子下落末速 度即为径向速度,故由此造成的谱曾宽作 用最大。
• 在实际工作中需要了解的是有效照射体内
平均的多普勒速度和速度谱宽度,根据以
上关系式,并注意到 f 2v 关系式,则平均
多普勒速度
v
,和速度谱方差
2 v
分别为:
v 1 v v dv
Pr
2 v
1 Pr
vv
2
v dv
径向速度谱密度、平均径向速度、径向速度 谱宽三者的关系示意图
第三章 SAR基本原理

Fp(%) 0.0 1.5 6.0 13.4 23.4 35.7 50.0 65.8 82.6 100.0
雷达图像的透视收缩,实际上是电磁波能量集中的表现,前坡的收缩比后坡严 重,所以前坡的图像要比后坡“亮”,当整个坡度收缩成一点,图像最“亮”。
顶底位移(Layover)
• 顶底位移是透视收缩的一种极端情况,它发生在入射角小于局部地形 倾斜角时。
• In imagery, radar shadows occur in the down-range direction behind tall objects. They are a good indicator of radar illumination direction if annotation is missing or incomplete.
阴影(shadow)
• Radar shadows in imagery indicate those areas on the ground surface not illuminated by the radar. Since no return signal is received, radar shadows appear very dark in tone on the imagery.
2007,12
Radarsat-2,
C Qud Pol
10
工作频段的选择
• Application factors: – Radar wavelength should be matched to the size of the surface features that
we wish to discriminate • – e.g. Ice discrimination, small features, use X-band • – e.g. Geology mapping, large features, use L-band • – e.g. Foliage penetration, better at low frequencies,use P-band In general, C-band is a good compromise • System factors: – Low frequencies: • More difficult processing • Need larger antennas and feeds • Simpler electronics – High frequencies: • Need more power • More difficult electronics • Good component availability at X-band Note that many research SARs have multiple frequency bands
脉冲多普勒雷达
Rm a xVm a x
c
8
λ是雷达波长,c为光速。λ越大,不模糊距离和速度的乘积就越大, 但要增加雷达的体积和成本,还有其他限制,因而是不现实的。
(2)解距离模糊
(a)重频参差解距离模糊
雷 频达率以下重读复出频的率模f糊r1、距f离交不替同工,作可,以如据果此发计生算了出距实离际模距糊离,。在解两距个离重复模 糊有两个限制:
(4)无杂波区
适当选择雷达脉冲重复频率使地面杂波不连续不重叠,形成无杂波 区.在无杂波区域,只有接收机噪声,没有地面杂波,有利于发 现该区域的运动目标.
2.脉冲重复频率的选择
根据技术要求和用途(如要求雷达在无杂波区检测目标还是满足无模糊测速), 也可以根据战术要求选择高,中,低脉冲重复频率段.
结果:
回波
目标 扫描轨迹
回波
扫描角度
图3.8 圆锥扫描示意
扫描角度
βx 波程差l
y
x 图3.9 单脉冲跟踪示意
目标方位βx与波程差l和信号相位差θ的关系:
l x sin x
(3-9)
l 360(度)
( 3-10)
x
arcsin
360 x
( 3-11)
同样可以求得y方向的方位角βy。 在PD雷达中实现单脉冲体制是非常困难的:性能优良的杂波滤波器
f
(c)用fsa1时钟复采样的数字信号延拓频谱
图3.12采样信号频谱延拓与频谱模糊的产生
同样由于目标回波的多普勒频移可能大于若干脉冲重复频率,使测
量到的多普勒频率与实际多普勒频率不一定相等,同一频率读数对
应的目标真实速度有多种可能值的现象叫做测速模糊。未经解模糊 肯定的读数速度叫做模糊速度。
雷达原理与对抗技术习题答案
第一章1、雷达的基本概念:雷达概念(Radar),雷达的任务是什么,从雷达回波中可以提取目标的哪些有用信息,通过什么方式获取这些信息答:雷达是一种通过发射电磁波和接收回波,对目标进行探测和测定目标信息的设备。
任务:早期任务为测距和探测,现代任务为获取距离、角度、速度、形状、表面信息特性等。
回波的有用信息:距离、空间角度、目标位置变化、目标尺寸形状、目标形状对称性、表面粗糙度及介电特性。
获取方式:由雷达发射机发射电磁波,再通过接收机接收回波,提取有用信息。
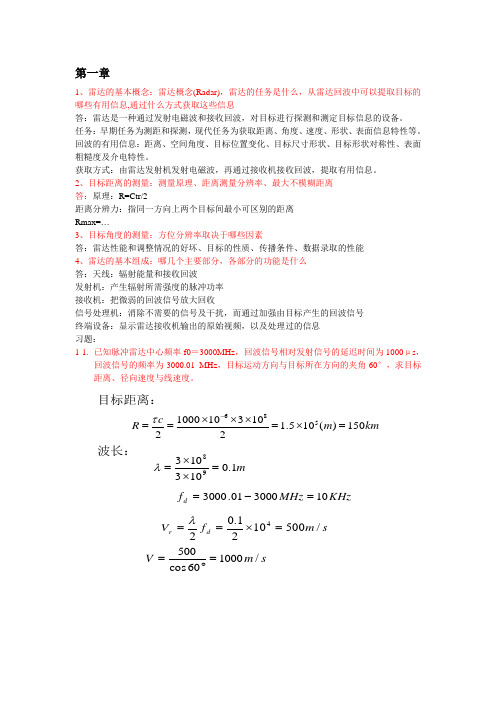
2、目标距离的测量:测量原理、距离测量分辨率、最大不模糊距离 答:原理:R=Ctr/2距离分辨力:指同一方向上两个目标间最小可区别的距离 Rmax=…3、目标角度的测量:方位分辨率取决于哪些因素答:雷达性能和调整情况的好坏、目标的性质、传播条件、数据录取的性能 4、雷达的基本组成:哪几个主要部分,各部分的功能是什么 答:天线:辐射能量和接收回波发射机:产生辐射所需强度的脉冲功率 接收机:把微弱的回波信号放大回收信号处理机:消除不需要的信号及干扰,而通过加强由目标产生的回波信号 终端设备:显示雷达接收机输出的原始视频,以及处理过的信息 习题:1-1. 已知脉冲雷达中心频率f0=3000MHz ,回波信号相对发射信号的延迟时间为1000μs ,回波信号的频率为3000.01 MHz ,目标运动方向与目标所在方向的夹角60°,求目标距离、径向速度与线速度。
685100010310 1.510()15022cR m kmτ-⨯⨯⨯===⨯=m 1.010310398=⨯⨯=λKHzMHz f d 10300001.3000=-=s m f V d r /5001021.024=⨯==λsm V /100060cos 500=︒=波长:目标距离:1-2.已知某雷达对σ=5m2 的大型歼击机最大探测距离为100Km,1-3.a)如果该机采用隐身技术,使σ减小到0.1m2,此时的最大探测距离为多少?1-4.b)在a)条件下,如果雷达仍然要保持100Km 最大探测距离,并将发射功率提高到10 倍,则接收机灵敏度还将提高到多少?1-5.KmKmR6.3751.010041max=⎪⎭⎫⎝⎛⨯=dBkSkSii72.051,511.010minmin-===∴⨯=⨯b)a)第二章:1、雷达发射机的任务答:产生大功率特定调制的射频信号2、雷达发射机的主要质量指标答:工作频率和瞬时带宽、输出功率、信号形式和脉冲波形、信号的稳定度和频谱纯度、发射机的效率3、雷达发射机的分类单级震荡式、主振放大式4、单级震荡式和主振放大式发射机产生信号的原理,以及各自的优缺点答:单级震荡式原理:大功率电磁震荡产生与调制同时完成,以大功率射频振荡器做末级优点:结构简单、经济、轻便、高效缺点:频率稳定性差,难以形成复杂波形,相继射频脉冲不相参主振放大式原理:先产生小功率震荡,再分多级进行调制放大,大功率射频功率放大器做末级优点:频率稳定度高,产生相参信号,适用于频率捷变雷达,可形成复杂调制波形缺点:结构复杂,价格昂贵、笨重是非题:1、雷达发射机产生的射频脉冲功率大,频率非常高。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
对数放大器
压缩动态范围的另一种手段
输出电压Uo与输入电压Ui对数成正比的放大器
对数放大器可在中频上实现,也可在视频上实现;还 可中频输入,视频输出,形成对数检波器。
对数放大器振幅特性
线性-对数放大器
线性段 对数段
线性段与对数段交点处的输入输出电压
第三章 雷达接收机
通过适当的滤波将天线上接收到的微弱高频信号 从噪声和干扰中选择出来,并经放大和检波后, 送至显示器、信号处理器或由计算机控制的雷达 终端设备中。
超外差技术
无线电波 选频滤波
fRF
fL
fIF
混频器
滤波
本振
解调
解调输出 滤波
如上图所示,当接收的电波频率fRF变化时,本振频率fL和选
(2)低噪声高放:提高灵敏度,降低接收机噪声 系数,热噪声增益。
(3)Mixer,LD,AFC:保证本振频率与发射频 率差频为中频,实现变频。
返回框图
1
中频部分及AGC:
(1)匹配滤波: (2)AGC:auto gain control.
视频部分:
(1)检波:包络检波,同步(频)检波(正交两 路),相位检波。
由天线进入接收机的各 种干扰和天线热噪声
噪声的谱性质
噪声是随机信号,因而只能讨
高斯白噪声GWN、电阻热噪声论在其接时收域机和通功带率内谱近统似计为特白性噪声
噪声电压均方值
测试设备的通带
式中k为波尔兹曼常量
功率谱密度p(f)--常数
额定噪声功率 网络匹配时ZL = Z *,内噪声在负载上所形成的功率为:
Te= (F-1)To
接收机灵敏度
识别系数 当接收机输出信号的信噪比达到M时,才能检测出信号。
灵敏度 令接收机输出信噪比达到M的输入最小可检测信号Simin
第三节 接收机的几种附属电路
AFC电路 调谐本振跟踪发射信号频率
检测接收机输出信号频率f I ,根据频率偏差产生误差电压 调整本振的混频频率,保证中频稳定不变。
提高灵敏度,降低接收机 发射频率差频为
噪声系数,热噪声增益
中频,实现变频
Hale Waihona Puke 高频输入 接收机 保护器低噪高放
混频器
中放
检波器
至终端 视放
高频部分
发射机工作时,使接收机输入端 短路,并对大信号限幅保护
本振
视频部分 至质量指标部分
高频部分:
(1)T/R 及保护器:发射机工作时,使接收机输 入端短路,并对大信号限幅保护。
(2)放大:线性放大,对数放大,动态范围。
返回框图
3.动态范围:表示接收机能够正常工作所允许的输入 信号强度的变化范围。 过载时的Si /Si min,80~120 dB
4. 中频的选择与滤波特性: 中频输出频率f o ≥ 0.5∆f R ,中频选择通常选择 30M~500M。抑制镜频的效果,在实际工作中还 与发射波形特性、接收机工作带宽有关。
5
AGC电路
调整接收机的动态范围 动态范围: 接收机能够正常工作的允许的输入
信号的强度范围。
具体电路
AGC电路的作用
1. 在跟踪雷达中,接收机输出的角误差信号强度只 与目标偏离天线轴的夹角有关,而与目标距离的 远近、目标反射面积的大小等因素无关。为了得 到这种归一化的角误差信号,就需要AGC。
频滤波器的中心频率f0= fRF能够同步改变,从而使输出的fIF固 定不变,这种技术称为外差技术,当fIF低于fRF而高于信号带 宽B时就称为超外差技术。超外差技术具有灵敏度高、选择
性好、工作稳定、中频部分可标准化等优点。
返回框图
第一节 雷达接收机的组成和 主要质量指标
超外差接收机的组成 保证本振频率与
经混频后进入中频信道的两个信号在射 频上对称地位于本振频率fL两边互为镜 像,因此将这种现象称为镜频干扰。当 射频选频滤波器的选频特性一定时,混 频器输出的中频频率越高,两个镜像频 率间相隔越远,镜频抑制的效果越好。
主要质量指标
1.灵敏度:Simin ,用最小可检测信号功率Simin 表 示,检测灵敏度,给定虚警概率 Pfa ,达到指定检 测概率Pd 时的输入端的信号功率:
6.抗干扰能力:杂波干扰(MTI,MTD)、有源干
扰、假目标干扰。 7.微电子化和模块化结构。MMIC 微波单片集成电
路、IMIC 中频单片集成电路、ASIC 专用集成电 路。
2
第二节 接收机的噪声和灵敏度
§3.2.1 接收机的噪声
噪声来源:内部噪声、外部噪声
接收机中的馈线、放电保护 器、高频放大器或混频器产生
NiGa是输入端噪声通过“理想接收机”后,在输出端呈现 的额定噪声功率。
噪声温度
由噪声系数部分讨论的结果: ∆N=(F-1)GNi
上式两边同时除以G,表示将所有的接收机内部 噪声折合成加在输入端的等效噪声,且设其为
∆N/G=kTeBn 代入前述关系式,则有如下关系成立
Te= (F-1)To 考虑输入噪声主要为天线热噪声,则有接收机的 实际噪声温度Ts=Te+TA
6
近程增益控制STC 防止近程杂波干扰所引起的中频放大器过载。
脉冲体制雷达通常由整机时序模块在脉冲重复周期 内的不同距离区间控制放大链路增益来实现。
传统显示终端类型:A显、B显、E显、J显、A/R显、 P显
显示器画面 目标的点迹
杂波引起的虚假点迹
7
接收机输入端信号噪声比与输出端信号噪声比 的比值。其公式为:
规定输入噪声以天线等效电阻 RA在室温T 0 = 290 K 时产生的热噪声为标准
3
线性系统: So=GSi , No=GNi +∆N ,因而有:
接收机引入噪声
所以F ≥ 1 。
噪声系数的物理意义 噪声系数表示由于接收机内部噪声的影响,使接收机输出 端的信噪比相对其输入端的信噪比变差的倍数。此时有:
噪声温度的物理意义 将接收机内部噪声看成是“理想接收机”的天线电阻 Ra在温度Te时所产生的。
4
级联电路的噪声系数
整个电路的噪声系数为
结论:要Fo减小,需Fi 减小,Gi 增大, Gi 影响最大,Fo取决 于最前几级,所以要采用低噪声高放。
习题
已知接收机内噪声在输出端的额定功率为 0.1W,额定功率增益为1012,测试带宽为 3MHz,求等效输入噪声温度和接收机噪声系 数。
结论:任何无源二端网络输出的额定噪声功率只与其温度T 和 通带Bn有关
色噪声的定量描述
等效噪声功率谱宽度 物理意义:将色噪声用功率相等 的带限白噪声来等效。 在雷达接收机中,谐振电路级数 较多时,Bn常用3 dB 信号带宽B 近似。P55,表3.1
§3.2.2 接收机的噪声系数和噪声温度
噪声系数
通常所需接收机 gain = 120 ~ 160 dB , Simin=-120~-140dbw 主要由中频完成。
2. 工作频带宽度:指瞬时工作频率范围,频率捷变 雷达要求的接收机工作频带宽度为10~20% 。
5.工作稳定性和频率稳定度:指当环境变化时,接收 机性能参数受到影响的程度,频率稳定度,信号处 理,采取频率稳定度、相位稳定度较高的本振,“稳 定本振”。