计算摄像学专题第11讲(上)
摄影摄像技术完整全套教学课件
摄影摄像技术完整全套教学课件摄影摄像技术作为一门艺术与技术相结合的学科,涵盖了从基础知识到高级技巧的广泛内容。
本教学课件旨在为学习者提供系统、全面且易于理解的摄影摄像知识体系,帮助他们逐步掌握这一领域的核心技能。
一、摄影摄像基础知识(一)摄影摄像的定义与区别摄影是通过相机捕捉瞬间的静态画面,强调构图、光线和色彩的瞬间定格;而摄像则是连续记录动态影像,注重画面的连贯性和叙事性。
(二)相机与摄像机的基本构造1、镜头:介绍不同类型的镜头,如广角、标准、长焦等,以及它们对画面的影响。
2、感光元件:解释感光元件的作用和常见类型,如 CCD 和CMOS。
3、快门:阐述快门速度对曝光和动态效果的控制。
(三)拍摄模式与参数设置1、自动模式与手动模式的区别和适用场景。
2、光圈、快门速度、感光度(ISO)的相互关系及调整方法。
二、构图与取景(一)常见的构图法则1、三分法构图:将画面分为九宫格,把主体放在交叉点或线上。
2、对称构图:使画面具有平衡和稳定感。
3、引导线构图:利用线条引导观众的视线到主体上。
(二)取景的技巧1、选择合适的拍摄角度,包括俯拍、仰拍和平拍。
2、考虑前景、中景和背景的搭配,营造层次感。
三、光线与色彩(一)光线的类型1、自然光:如阳光、月光,了解不同时间段光线的特点。
2、人工光:如闪光灯、灯光设备,掌握其使用方法。
(二)光线的方向1、顺光:使主体清晰明亮,但可能缺乏立体感。
2、逆光:营造出轮廓光和神秘氛围。
3、侧光:增强物体的立体感和质感。
(三)色彩的原理与运用1、色彩的三要素:色相、饱和度、明度。
2、色彩搭配的原则,如对比色、互补色的运用。
四、拍摄技巧与实践(一)静态摄影技巧1、风景摄影:如何拍摄壮丽的自然风光。
2、人像摄影:捕捉人物的表情和情感。
3、微距摄影:展现微小物体的细节之美。
(二)动态摄像技巧1、稳定器的使用:保持画面平稳。
2、镜头运动:推、拉、摇、移、跟等的运用。
3、拍摄脚本的撰写:为有计划的拍摄提供指导。
计算摄像学

计算摄像学
摄像学是一门研究如何通过拍摄、记录和处理图像来解决实际问题的学科。
它包括计算机视觉技术、图像处理、计算机图像处理、图像传感器技术、模式识别和其他影像技术等。
摄像学是一个复杂的领域,其中包括多种技术,比如数字图像处理、光学及物理原理等。
摄像学的主要应用包括图像获取、自动识别、图像处理、智能视觉系统和机器视觉等。
它可以用来解决实际问题,如汽车自动停车、机器人导航、物体检测和识别、虚拟现实等。
摄像学可以更有效地应用于社会和工业领域,如环境监测、安全监管、医疗影像处理和机器人自主控制等。
摄像学的关键技术是照相和图像处理。
照相技术包括摄影术、摄像术、光学技术和摄像机控制等。
它们可以使图像处理的成果更加准确和更有效。
图像处理是摄像学的核心技术,它涉及数字图像处理、模式识别和虚拟现实等技术。
这些技术可以实现图像分析、模式识别和自动控制等功能。
- 1 -。
摄像基础ppt课件

制作方法
使用内置效果、自定义效果、结合 其他软件制作等
应用举例
电影片头、广告宣传片、MV等中的 特效应用
35
输出格式选择和发布渠道建议
输出格式
常用视频格式如MP4、AVI、 MOV等,以及不同分辨率和编
码设置
发布渠道
社交媒体、视频网站、电视台等 不同平台的发布要求和规范
宣传推广
利用社交媒体和线下活动等方式 进行作品推广和宣传
20
运动镜头在叙事和表意中作用
2024/1/25
叙事作用
运动镜头可以连续地展示时间和空间的变化,从而推动故事情节的发展。通过运 动镜头的运用,可以交代故事发生的时间、地点、人物以及事件的发展过程。
表意作用
运动镜头可以通过不同的运动方式和节奏来表现不同的情感和氛围。例如,快速 的推镜头可以表现紧张、激动的情绪;缓慢的拉镜头则可以表现宁静、深远的意 境。
2024/1/25
3
摄像定义及发展历程
2024/1/25
摄像定义
使用摄像机记录影像的过程,涉 及光学、电子学、计算机科学等 多个领域。
发展历程
从早期的胶片摄影机到现代的数 字摄像机,经历了模拟信号到数 字信号的转变,摄像技术不断革 新发展。
4
摄像机类型与特点
摄像机类型
根据使用场合和拍摄需求,摄像机可 分为家用摄像机、专业摄像机、广播 级摄像机等。
符合剧情需要
根据故事内容和情节发展要求,合理安排场景调度。
突出主题
通过场景调度突出故事主题和人物形象特点。
2024/1/25
27
场景调度原则和方法探讨
2024/1/25
• 视觉美感:注重画面构图和色彩搭配,营造视觉 美感。
镜头焦距的计算公式及公式图解计算方法
镜头焦距的计算公式及公式图解计算方法一、公式计算法:视场和焦距的计算视场系指被摄取物体的大小,视场的大小是以镜头至被摄取物体距离,镜头焦头及所要求的成像大小确定的。
1、镜头的焦距,视场大小及镜头到被摄取物体的距离的计算如下;f=wL/Wf =hL/hf:镜头焦距 w:图象的宽度(被摄物体在ccd靶面上成象宽度)W:被摄物体宽度L:被摄物体至镜头的距离h:图象高度(被摄物体在ccd靶面上成像高度)视场(摄取场景)高度H:被摄物体的高度ccd靶面规格尺寸:单位mm规格 W H1/3" 4.8 3.61/2" 6.4 4.82/3" 8.8 6.61" 12.7 9.6由于摄像机画面宽度和高度与电视接收机画面宽度和高度一样,其比例均为4:3,当L不变,H或W增大时,f变小,当H或W不变,L增大时,f增大。
2、视场角的计算如果知道了水平或垂直视场角便可按公式计算出现场宽度和高度。
水平视场角β(水平观看的角度)β=2tg-1= 垂直视场角q(垂直观看的角度) q=2tg-1= 式中w、H、f同上水平视场角与垂直视场角的关系如下: q=或=q 表2中列出了不同尺寸摄像层和不同焦距f时的水平视场角b的值,如果知道了水平或垂直场角便可按下式计算出视场角便可按下式计算出视场高度H和视场宽度W. H=2Ltg、W=2Ltg 例如;摄像机的摄像管为17mm(2/3in),镜头焦距f为12mm,从表2中查得水平视场角为40℃而镜头与被摄取物体的距离为2m,试求视场的宽度w。
W=2Ltg=2×2tg=1.46m 则H=W=×1.46=1.059m 焦距f越和长,视场角越小,监视的目标也就小。
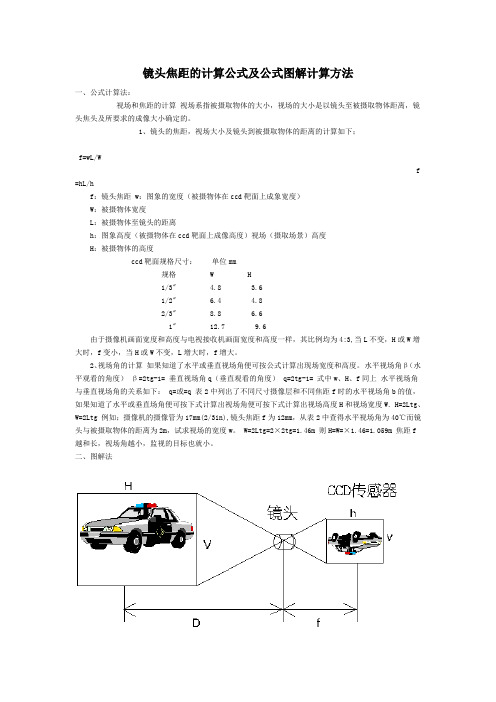
二、图解法如前所示,摄像机镜头的视场由宽(W)。
高(H)和与摄像机的距离(L)决定,一旦决定了摄像机要监视的景物,正确地选择镜头的焦距就由来3个因素决定; *.欲监视景物的尺寸 *.摄像机与景物的距离 *.摄像机成像器的尺士:1/3"、1/2"、2/3"或1"。
镜头计算方式范文

镜头计算方式范文镜头计算是指根据特定的参数和公式来计算出一个摄像机镜头的焦距、视角、景深和可视范围等参数。
这些参数对于拍摄者来说非常重要,因为它们直接影响着摄影作品的呈现效果。
下面将逐个介绍镜头计算的各个参数以及计算方式。
1. 焦距(Focal Length)焦距通常用毫米(mm)来表示,它决定了拍摄的视角,即被摄体在画面上的大小。
较小的焦距会产生广角视角,可拍摄更多的画面,视觉效果较宽广;而较大的焦距则会产生长焦视角,视觉效果较为集中和放大。
镜头的焦距计算通常可以通过以下公式得到:Focal Length = Image Width / (2 * tan(Angle of View / 2))其中,Image Width表示画面宽度,Angle of View表示所需视角。
2. 视角(Angle of View)视角是指摄像机镜头可以拍摄到的画面范围,在摄影中通常使用水平视角来描述。
视角通常用度数(°)表示,它可以影响到摄影作品的逼真程度和效果。
较大的视角可以捕捉到更多的画面,具有广角的特点;而较小的视角则具有长焦特点,局限于画面的一小部分。
视角可以通过以下公式计算得到:Angle of View = 2 * arctan (Image Width / (2 * Focal Length))3. 景深(Depth of Field)景深是指照片中清晰的范围,即在照片中焦点距离前后一定范围内清晰的区域。
景深的大小受到多个因素的影响,包括焦距、光圈和距离等。
较大的光圈和较短的焦距会导致较小的景深,拍摄物体前后的背景会模糊;而较小的光圈和较长的焦距会导致较大的景深,使整个画面都能保持清晰。
景深的计算需要知道以下参数:焦距、光圈、距离和相机传感器类型。
计算景深的公式复杂且多样。
其中,一种常用的计算公式为:Depth of Field = (2 * f² * N * CoC) / (S * S)其中,f表示焦距,N表示光圈值,CoC表示圆形光斑直径(也称为Circle of Confusion),S表示距离。
摄像机焦距和视场角计算

摄像机焦距和视场角计算摄像机焦距和视场角是常用的摄影和摄像术语,用于描述摄像机镜头的属性。
摄像机焦距是指摄像机镜头的光学焦点到图像传感器(或胶片)的距离,通常以毫米(mm)为单位表示。
焦距决定了摄像机的视场角度,即摄像机镜头能够捕捉到的景物范围。
在计算摄像机焦距和视场角的过程中,首先需要了解以下几个概念:1.传感器尺寸:摄像机传感器是指将光线转换为电信号的装置,通常有不同尺寸的传感器可选择。
传感器尺寸较大的摄像机具有更高的分辨率和更好的低光性能。
2.画幅尺寸:画幅尺寸是指摄像机拍摄到的画面范围的宽度和高度,通常以横向和纵向的长度表示。
3.视场角(FOV):视场角是指摄像机能够捕捉到的画面范围,通常以水平、垂直或对角线的度数表示。
视场角越大,摄像机可以捕捉到的范围就越广。
接下来,我们将介绍计算摄像机焦距和视场角的几种方法:1. 透镜公式法:透镜公式法是根据透镜公式计算焦距的方法。
透镜公式表示为1/f = 1/d0 + 1/di,其中f表示透镜焦距,d0表示物距,di 表示像距。
在摄像机中,物距可以近似等于无穷大(对于远离摄像机的物体),因此透镜公式可以简化为1/f ≈ 1/di。
通过测量成像距离di,就可以得到透镜的焦距f。
2. 画幅倍率法:画幅倍率法是基于不同画幅尺寸之间的比例关系计算焦距的方法。
通常,标准35mm画幅(36x24mm)被认为是基准画幅,其焦距与其他画幅下的焦距之间存在倍数关系。
通过将标准35mm画幅的焦距与其他画幅下的焦距进行比较,可以计算出与之相对应的焦距。
3.视场角计算:一旦得到了焦距,就可以通过以下公式计算视场角:视场角 = 2 * arctan(0.5 * 画幅尺寸 / 焦距)其中,arctan表示反正切函数。
视场角可以通过焦距和画幅尺寸来计算,可以根据需要计算水平、垂直或对角线的视场角度。
需要注意的是,焦距和视场角之间存在一种相反的关系。
焦距越短,视场角越大,焦距越长,视场角越小。
计算摄像学专题 ppt课件

单张图像的Depth of Field增强 -33-
多张图像拍摄的关键技术 -30-
此方法分为两个步骤
分割—Graph-cut 融合—梯度融合方案
Graph-cut可以用户指定,也可全自动计算 梯度融合则是保证图像的视觉效果
第十二讲提纲
-31-
一 问题的由来
二 处理方法——Tradeoff
Байду номын сангаас
2.1 多张图像拍摄 2.2 单张图像拍摄
三 本节课小结
单张图像的Depth of Field增强 -32-
多张图像拍摄增加Depth of Field,只能针 对静态场景
如何实时地增加动态场景的Depth of Field 成为一个棘手的问题
问题是:
能否利用单张图像增加Depth of Field?
答案是:
这是可以做到的,我们将重点介绍几类单 张图像Depth of Field增强的方案
增大Depth of Field的技术手段是否可以按 照如下思考的方式
多张图像拍摄:相机分别聚焦于不同平面,
然后融合拍摄的多组图像?
单张图像拍摄:
捕获光场,重新积分不同角度的光线,得到图像? 想办法使得单张图像的整体模糊与深度关系可控?
如,模糊核一致或模糊核清楚地知道
第十二讲提纲
-26-
一 问题的由来
……
多张图像拍摄的关键技术 -28-
融合多幅图像信息,以期望获得更大景深 的效果是一种很直观的想法
这里仅做简要介绍,感兴趣的同学可翻阅 相关的视觉文章
牺牲时间,换取景深。该想法关键问题是
如何融合不同焦
距平面上的图像?
多张图像拍摄的关键技术 -29-
SIGGRAPH 2004 Interactive Digital Photomontage
摄影摄像课程ppt课件

音效与配乐的选择与应用
了解后期制作的基本流程,包括剪辑、调色、音效处理、输出等环节。
后期制作流程
学习如何调整画面色彩,改善画质,营造出特定的氛围和风格。
调色技巧
掌握不同输出格式的特点和要求,以及如何设置输出参数以确保影片质量。
输出格式与参数设置
了解如何备份和存储影片文件,以确保数据安全。
备份与存储
蒙太奇手法
学习蒙太奇的概念和分类,掌握其在影片剪辑中的应用。
拍摄技巧与剪辑方法
了解音效在影片中的作用,学习如何选择和运用环境音、效果音等。
音效的作用与分类
掌握如何根据影片主题和情感选择合适的音乐,以及音乐的编辑和合成技巧。
配乐的选择与应用
学习如何将音效、配乐与画面紧密结合自然光线和色彩变化,选取具有美感的风景元素。
观察与选景
运用前景、中景、远景的构图方式,表现风景的层次感和空间感。
构图与布局
根据光线条件合理设置曝光参数,保留细节和色彩。
曝光控制
尝试不同的拍摄角度和手法,如慢门、追焦等,表现风景的独特魅力。
创意拍摄
风景摄影摄像技巧
选取角度
根据建筑特点和周围环境,选取最佳拍摄角度,表现建筑的立体感和空间感。
发展趋势
随着科技的不断进步,未来的摄影摄像技术将更加智能化、自动化,同时也会出现更多新的创作手法和表现形式。
第二季度
第一季度
第四季度
第三季度
光线
构图
色彩
景深
摄影摄像的基本要素
光线是摄影摄像的灵魂,不同的光线条件会产生不同的影像效果。了解光线的性质、方向和强度等要素,对于创作出优秀的作品至关重要。
构图是摄影摄像的基本技巧之一,通过合理的构图可以突出主题、引导观众的视线,增强作品的表现力。常见的构图方法有三分法、黄金分割法等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
e
两摄像机光心连线与CCD线性排列方向不平行 通过将对极点映射到水平位置(垂直坐标为0)可 对此进行校正
cos R sin 0 sin cos 0 0 0 1
无穷远变换
e e
-14-
map epipole e to (1,0,0)
两摄像机由于汇聚造成两图像的像平面不平行 通过将对极点映射到无穷远(对级线平行)可对 此进行校正
-10-
m p1 m p 2 m p 3 m p 4
… … …
m pn
Mn
M1 M 2 M 3 M 4
光心改变
mn1 mn 2 mn3 mn 4
mnn
通过任意选定大量{M}点,进行投影得到{ml},{mr}, 最后使用最小二乘拟合得到变换式H
m pi H
mni
无摄像机参数下的校正
Hr
-11-
Hl
光心不变的退化场景,平面单应性对空间所有点一致成 立,即存在H变换,使投影满足mr=Hml
T mnl ( K nl Rnl )( K pl RT pl ) m pl
摄像机参数下的校正算法
1 M C pl pl ( K pl R T ) m p1 pl T 1 M Cnl nl ( K nl Rnl ) mn1
x f 1 y 0 z c 1 0
xc y c R T zc 0 3 1
多视图关系
对极几何
l
M
-7-
l' m I e
I
m
o
e'
o
所有的外极线都过对应的外极点,外极点是光心连线与图 象平面的交点。对应外极线束构成一射影变换
1 G 0 ex 2 2 ex e y 0 1 ey
2 2 ex ey
0 0 1
消定义仿射变换
转化为最小化问题
2 ( A G R T p G R T p ) l l l l li r r r ri i
非线性变化示意
-20-
权重策略
-21-
梯度图
运动检测
人脸检测
非线性变换方程组
权重值 线性校正约束项
-22-
时间一致性约束项
边界确定策略
-23-
参考文献
-24-
[1] R. Hartley and A. Zisserman, Multiple view geometry incomputer vision, Cambridge Univ Pr, 2003. [2] Philipp Krahenbuhl, Manuel Lang, Alexander Hornung,and Markus H. Gross, “A system for retargeting ofstreaming video,” ACM Trans. Graph., vol. 28, no. 5,2009. [3] Manuel Lang, Alexander Hornung, Oliver Wang, Steven Poulakos, Aljoscha Smolic, and Markus H. Gross, “Non-linear disparity mapping for stereoscopic 3d,” ACM Trans. Graph., vol. 29, no. 4, 2010. [4] Lior Wolf, Moshe Guttmann, and Daniel Cohen-Or, “Non-homogeneous content-driven video-retargeting,” in ICCV, 2007, pp. 1–6. [5] Andrea Fusiello and Luca Irsara, “Quasi-euclidean un-calibrated epipolar rectification,” in ICPR, 2008, pp. 1–4.
世界坐标系
xw t y w 1 xw 1
u f u v 0 1 0
f u cot f v / sin 0
u0 x y v0 1 1
(e' )T Fmi 0
Fe1 0, F T e' 0
目录
-8-
1
2
3
校正简介
传统算法
新算法
摄像机参数下的校正算法
P K [ R , R C ] m p1 Ppl M mn1 Pnl M
T T
-9-
光心不变
1 M C pl pl ( K pl R T ) m p1 pl T 1 M Cnl nl ( K nl Rnl ) mn1
1 0 0 Al a b c 0 0 1
进一步转化为线性最小二乘问题
ˆ (ax
i
li
ˆ li c x ˆri ) by
2
目录
-16-
1
2
3
校正简介
传统算法
新算法
基本流程
传统几何 校正变换H
全局统一变换 像素点无差异
不同像素点 区别对待
-17-
图像空洞
图像校正 + 图像填充
非线性几何 校正变换H’
基本流程
传统几何 校正变换H 1
-18-
重力垂向 引入 非线性变换 方程组求解
2
权重图
3
边界条件
4
非线性几何 校正变换H’
重力垂向信息引入
对极线的多义性
-19-
给定左图的重力方向g=(gx,gy),可以得到左图旋转角度 θl=arctan(gx/gy) 根据两图的对级线的斜率,可以得到右图对应的旋转角度 θr=θl-arctan(ery/erx)+arctan(ely/elx)
计算摄像学专题第八讲(上)
——多视角图像校正技术研究
戴琼海 清华大学 自动化系 2011-03-30
目录
-2-
1
2
3
校正简介
传统算法
新算法
目录
-3-
1
2
3
校正简介
传统算法
新算法
问题提出
摄像机固定误差 汇聚型摄像机
-4-
校正目的
-5-
摄像机模型
-6-
图像像素坐标系
图像物理坐标系
摄像机坐标系
0 f 0 xc 0 0 yc 0 0 z c 1 0 1
通过求解平面单应变换Hl和hr,实现无摄像机参 数下的几何校正。
坐标系变换
-12-
希望H对图像给定的选择点pc的邻域作用尽可能是一 个刚性变换 通常图像的中心是一个好的选择
1 0 pcx T 0 1 pcy 0 0 1
对极点旋转
e
-13-
-25-