数学建模 人体膝关节受力分析 西南财经大学校赛2015
骑行时不同屈曲角度膝关节软骨受力分析

骑行时不同屈曲角度膝关节软骨受力分析马雪梅;张春秋;高丽兰;叶金铎;张西正【摘要】在对骑行人车系统动力学研究的基础上,分析在骑行周期内膝关节软骨的受力状态,以期获得关节软骨受力的规律,增加对骑行时膝关节生物力学特性的理解.基于有限元分析法,建立包括股骨、胫骨、腓骨、髌骨、关节软骨、半月板及韧带组织的人体全膝关节有限元模型.将骨组织刚体化,并对其施加屈曲位移边界条件,包括胫骨相对股骨的内旋、内收、前移和外移以及髌骨相对股骨的屈曲、内旋、内倾以及外移.通过显式动力学分析计算,获得膝关节屈曲60°、80°和100°相位,同时得到骑行状态上述屈曲位处膝关节软骨的应力分布.结果通过有限元分析,获得骑行姿态下膝关节相关相位的力学分布规律.结果表明,相同载荷下,最大von-Mises应力出现在屈曲100°位置,股骨软骨应力增幅达71.25%,髌骨软骨增大29.36%;随着骑行屈曲角度的增加,胫股关节高应力区逐渐向膝关节后部转移,髌股关节软骨受力逐渐上移.骑行时高应力发生在膝关节屈曲角度较大位置,胫骨平台软骨后侧、髌骨软骨上侧承受更大应力.【期刊名称】《中国生物医学工程学报》【年(卷),期】2016(035)001【总页数】5页(P119-123)【关键词】膝关节;软骨;骑行;有限元模型;屈曲【作者】马雪梅;张春秋;高丽兰;叶金铎;张西正【作者单位】天津市先进机电系统设计与智能控制重点实验室,天津理工大学机械工程学院天津300384;天津市先进机电系统设计与智能控制重点实验室,天津理工大学机械工程学院天津300384;天津市先进机电系统设计与智能控制重点实验室,天津理工大学机械工程学院天津300384;天津市先进机电系统设计与智能控制重点实验室,天津理工大学机械工程学院天津300384;军事医学科学院卫生装备研究所,天津300161【正文语种】中文【中图分类】R318骑行运动在日常生活中非常普遍。
2015数学建模竞赛优秀论文
图 2 太阳高度角
由三角形性质,显然,
OB
tan θ =
(1)
OA
即得,
OB H
L = OA =
=
(2)
tan θ tan θ
根据参考文献[1],太阳高度角θ的计算公式为:
sin θ = sin φ sin δ + cos φ cos δ cos σ
(3)
其中,φ为观测地地理纬度,δ为赤纬角,σ为时角。 参考文献[2]:所谓日面中心的时角,即从观测点天球子午圈沿天赤道量至太阳所在时圈的
图 1 夏半年日影运动
由于太阳和地球最短距离为1.471 × 108km,所以太阳光接近地球表面时可以近似看成 是平行光。参考文献[1],太阳高度角是指太阳光的入射方向和地平面之间的夹角,专业上 讲太阳高度角是指某地太阳光线与通过该地与地心相连的地表切线的夹角。如图(2)所 示,OB为竿长,OA为影长,θ即为太阳高度角。
4. 模型的建立
4.1. 问题一模型的建立
4.1.1. 立杆影长随参数变化的模型的建立 为了探求不同时间、不同经纬度下立杆影长的变化规律,我们建立以立杆为参考系的数
学模型。一年四季中除去春分、夏至、秋分、冬至以外,太阳相对于地球都不是严格由正东 向正西方向运动,因此立杆的影子变化不仅在于长度的改变,方向也在改变。同一天,随着 时间的推移,立杆的影子顶点应当是一个弧状轨迹。如图(1),为夏半年日影运动静态模 拟图。图中白色虚线表示影子顶点运动的部分轨迹。
太阳影子定位
摘要
本文通过分析影响立杆影长的相关参数的变化,建立了时间、太阳位置和影子轨迹关系 的数学模型,探究了影子变化的影响因素,以及通过影子变化如何确定拍摄时间和地点。
针 对 问 题1, 我 们 利 用 太 阳 高 度 角 的 定 义 及 太 阳 高 度 角 的 大 小 跟 赤 纬 角 、 时 角 、 当 地纬度相关,建立了影长关于太阳高度角、杆长、日期这三个因素变化的模型。然后依 据题目给定的参数利用MATLAB得到影长,并进行检验。结果显示2015年10月22日当天北 京时间9:00–15:00之间天安门广场上一根3米高的竿子在12:36分时取到最短影长为3.68米, 在9:00时取到最长影长为6.78米。
生物力学概论-膝关节有限元模型
Background
数据来源
基于CT 基于MRI
Background
CT与MRI的比较
目前膝关节韧带等软组织的建模方法大 多数是通过MRI扫描,得到DICOMDE的数 据,然后在商用CAE软件中建模。 MRI对软组织的显影比CT好,但MRI对骨 的显影不如CT,而且不能达到CT的扫描 精度。
Background
CT与MRI的比较:
• 软组织成像:MRI优于CT • 骨组织成像:CT优于MRI
Background
有限元单元法的基本原理:
是把由无限个质点构成的物体划分为 有限个结构形态简单并且力学特性已知的 单元,根据原有物体的几何材料特性以及 受力条件采用不同的单元种类,单元内部 点的待求量可由单元节点量通过选定的函 数关系插值求得。 单元划分越细,计算结果越精确。
Summary
构建膝关节生物力学模型 研究膝关节的生物力学特性 研究膝关节损伤的机制及治疗
有限元分析则可通过对实验条件 的 控制, 更准确 地模拟体内的力学情 况,。对人体力学行为进行有限元数 值模拟已成为深化对人体认识的一 种有效手段。
Summary
问题:
有限元单元划分、节点的选择、荷载和 边界件的规定 在 一定 程度上是人为的, 且不 能和实 验条 件完全 一致; 离 体 实验 所得 数据可能与生理情况存在差异; 模型 主要是 对膝关节 的骨性 结构及半月板进行了分析而 忽略了其中结 构较复 杂的韧 带, 因 此不能模型动态过程, 只能模 拟伸 直位膝 关节 所负 载的 情况 , 由 于以上 种种 因素造成计算机模拟的结果与实验会 有一些 偏差, 但如果 在总体变化趋势上与实验及临床应用能取 得一致, 说明 了 有限 元模型对生物力学分析是有一定作用的。 随着对组织力学特性的认识及计算机软件的进一步发展, 相信有限元分析在习惯见损伤和蜕变机机制的而研究治疗 方法的改进及应用方面的前景会更加广阔。
数学建模人体膝关节受力分析西南财经大学校赛2015

2015年西南财经大学数学建模校赛人体膝关节运动学问题参赛队员信息2015/5/41460.655123.0532 1.293931.59040.1314y x x x ω=-+++-人体膝关节运动学问题摘要:对于问题一,分析对峰力矩的影响因素及其影响大小。
首先处理了数据中的异常和缺失数据,用excel 做出了各变量相对于峰力矩的散点图,发现速度对其影响不受其他变量干扰,求出其它变量在不同角速度下与峰力矩的相关系数。
结果是年龄,左右脚与峰力矩相关系数极小;身高,峰力矩角度与峰力矩相关性不大;峰力矩角度与峰力矩是测试系统同时生成的观测指标,不能作为自变量。
性别x1,体重x4,屈伸膝x6,角速度w 与峰力矩y 的相关系数分别为0.571075,0.5195775,0.48212,-0.49915。
对相关性较强的变量建立多元回归分析模型,用matlab 软件解得方程为对于问题二,分析人胫股关节接触力与屈膝角度、身体各部位倾斜度的关系。
我们将身体简化为以胯和膝两处为转折点,躯干、大腿、小腿为三段均匀杆的模型,杆的宽度是膝盖的宽度。
假设人体质量均匀分布与长度正相关。
(1)人的重心落在脚的地面的接触点上,过重心垂线两侧质量相等(两侧杆长度之和相等)。
(2)胫股关节接触力力矩等于重力力矩。
(3)查找资料确定人体各关节活动角度范围,完成模型建立。
用LINGO 软件求解得胫股关节最大接触力是体重的7.1倍。
此时人体姿势为大腿与地面水平,与小腿夹角为45º,小腿与地面夹角为45º,腰部与水平面夹角为80.12º。
对于问题中的说法验证结果为人体屈膝30º,膝关节承受压力是体重的1.54641倍;屈膝60º,膝关节压力为体重的4.0926倍;屈膝90º,所承受的压力是体重的6.44204倍。
在一定误差范围下说法是正确的。
对于问题三,分析人体在上下台阶时胫股关节接触力与腿部动作速度的关系。
人体下肢运动力学分析与建模
III
杭州电子科技大学 学位论文原创性声明和使用授权说明
原创性声明
本人郑重声明: 所呈交的学位论文,是本人在导师的指导下,独立进行研 究工作所取得的成果。除文中已经注明引用的内容外,本论文不含任何其他个人 或集体已经发表或撰写过的作品或成果。 对本文的研究做出重要贡献的个人和集 体,均已在文中以明确方式标明。 申请学位论文与资料若有不实之处,本人承担一切相关责任。
论文作者签名:
日期:
年
月
日
学位论文使用授权说明
本人完全了解杭州电子科技大学关于保留和使用学位论文的规定,即:研 究生在校攻读学位期间论文工作的知识产权单位属杭州电子科技大学。 本人保证 毕业离校后,发表论文或使用论文工作成果时署名单位仍然为杭州电子科技大 学。学校有权保留送交论文的复印件,允许查阅和借阅论文;学校可以公布论文 的全部或部分内容,可以允许采用影印、缩印或其它复制手段保存论文。 (保密 论文在解密后遵守此规定)
杭州电子科技大学 硕士学位论文 人体下肢运动力学分析与建模 姓名:洪晓明 申请学位级别:硕士 专业:控制理论与控制工程 指导教师:叶明 20091201
杭州电子科技大学硕士学位论文
摘要
研制下肢假肢是为了改善残疾人的生活质量和促进医疗福利事业的发展, 同 时智能假肢也是机器人学和生物医学工程领域深受关注的研究方向。 智能下肢假 肢通过检测穿戴者的运动状态来控制假肢运动,从而提高步态的灵活性、协调性 和安全性。我国下肢残疾者人数众多,国内在智能下肢假肢的研究水平上也明显 落后于欧美发达国家,因此为肢体残疾人提供性能优良、价格低廉的假肢器械是 残疾人事业发展的重要任务。 人体下肢运动分析和建模是研究假肢的重要内容, 本文紧密围绕国家自然科 学基金资助项目“膝上假肢的运动力学信息获取与多运动模式控制方法研究 (60705010) ” ,主要做了以下几个方面的工作: 建立人体下肢运动生物力学信息获取系统, 利用表面电极获取下肢运动肌电 信号;利用多轴加速度传感器来检测大腿和小腿的倾角,获取肢体的姿态以及膝 关节角度和角速度; 下肢的脚与地面之间接触状态和作用力等信息采用足底安装 压力传感器的方式检测。 根据人体的结构和运动学的分析,建立人体下肢运动数学模型。比较动力学 建模中通常采用的拉格朗日法、牛顿-欧拉法等的优缺点,选用拉格朗日建模方 法,从系统能量角度出发构建人体下肢的动力学模型,并进行动力学分析,得到 关节力矩。 基于 Matlab/SimMechanics 仿真工具箱人体下肢运动系统建模,选取了平地 行走、上坡、上阶梯三种不同的运动模式,每种运动模式下分为摆动期和支撑期 两个阶段,建立相应的模型,以各关节的角位移、角速度、角加速度为输入,仿 真得到各种运动模式下髋关节和膝关节力矩。在平地行走模式下,将求解拉格朗 日方程所得到的关节力矩与 Matlab/SimMechanics 建模仿真所得的力矩进行比 较,两者基本吻合,证明了建立的模型比较合理。 运用数学统计方法对下肢运动参数进行分析, 首先应用新阈值消噪方法对肌 电信号进行消噪处理,用平均值法提取特征向量,利用回归分析的方法研究表面 肌电信号与关节力矩之间的关系,通过数据分析,表明关节力矩与表面肌电信号 近似成线性关系,在此基础上得出了关节力矩与表面肌电信号的表达式。运用回 归分析中多项式拟合方法对力矩与时间的关系进行建模, 得出了各种运动模式下 关节力矩与时间的关系,为下肢假肢的控制方法研究提供了实验与理论的依据。 关键词:运动生物力学,动力学,关节力矩,SimMechanic 建模,回归分析
基于Mimics和Ansys的人体膝关节生物力学分析
计算机应用与软件 Computer Applications and Software
Vol. 31 No. 6 Jun. 2014
基于 Mimics 和 Ansys 的人体膝关节生物力学分析
靳 龙
1 2
1
胡迎春
1
靳剑桥
2
陈岳坪
1
( 广西科技大学机械工程学院
[6 - 8 ]
0
引
言
然后导入到 Ansys 软件进行有限元分析的 维生物力学模型 生物力学分析。在很大程度上促进对人体骨骼与膝关节生物力 学的研究, 为膝关节疾病的预防和治疗提供相关参考以及对人 [9 , 10 ] 。 工假体的设计具有一定的指导意义
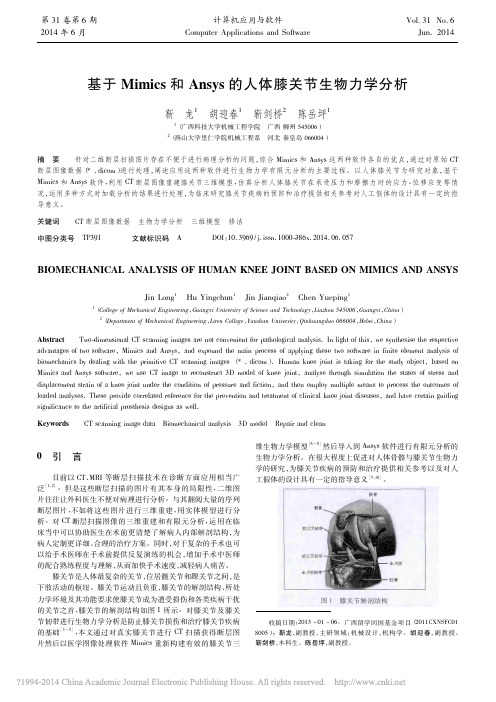
MRI 等断层扫描技术在诊断方面应用相当广 目前以 CT、 [1 , 2 ] 。但是这些断层扫描的图片有其本身的局限性, 泛 二维图 片往往让外科医生不便对病理进行分析 。与其翻阅大量的序列 断层图片, 不如将这些图片进行三维重建, 用实体模型进行分 析。对 CT 断层扫描图像的三维重建和有限元分析, 运用在临 床当中可以协助医生在术前更清楚了解病人内部解剖结构, 为 病人定制更详细、 合理的治疗方案。同时, 对于复杂的手术也可 以给手术医师在手术前提供反复演练的机会, 增加手术中医师 的配合熟练程度与理解, 从而加快手术速度, 减轻病人痛苦。 膝关节是人体最复杂的关节, 位居髋关节和踝关节之间, 是 下肢活动的枢纽。膝关节运动且负重, 膝关节的解剖结构、 所处 力学环境及其功能要求使膝关节成为遭受损伤和各类疾病干扰 的关节之首, 膝关节的解剖结构如图 1 所示。 对膝关节及膝关 节韧带进行生物力学分析是防止膝关节损伤和治疗膝关节疾病 [3 - 5 ] , 的基础 本文通过对真实膝关节进行 CT 扫描获得断层图 片然后以医学图像处理软件 Mimics 重新构建有效的膝关节三
基于结构方程模型的拉丁舞选手膝关节损伤因素研究

基于结构方程模型的拉丁舞选手膝关节损伤因素研究高思垚【摘要】主要采用结构方程模型结合拉丁舞项目自身的技术特点,对影响拉丁舞选手膝关节损伤的因素进行研究.研究结论如下:(1)通过因子分析得出拉丁舞选手的膝关节损伤因素由训练安排、身体素质、外界干扰、技术动作、准备活动、心理活动6个因子构成.(2)运用AMOS 17.0软件,得到结构方程初始模型,分析后发现“外界干扰”与“心理活动”这两个影响因子并不显著,被剔除.影响拉丁舞者膝关节损伤的主因子一共有4个,分别为:身体素质、技术动作、准备活动、训练安排.(3)这4个因子对拉丁舞选手膝关节损伤的影响大小排序为:技术动作、训练安排、身体素质、准备活动.【期刊名称】《四川体育科学》【年(卷),期】2016(035)006【总页数】5页(P51-55)【关键词】结构方程模型;拉丁舞;膝关节损伤【作者】高思垚【作者单位】武汉体育学院研究生院,湖北武汉,430000【正文语种】中文【中图分类】G804.54拉丁舞项目的技术特点、场地特点和舞鞋的特点使拉丁舞选手的下肢尤其是膝关节承受的压力较大,受伤的几率较高。
另外,由于长期不正确的技术动作等原因导致膝关节肌肉力量发展不平衡,由此产生慢性的膝关节损伤。
膝关节损伤使拉丁舞选手对技术动作的学习和掌握受到了严重的影响,而且给选手正常的训练、比赛甚至是日常生活带来了极大的不便。
很多优秀选手都由于膝关节的损伤而无法完全挖掘出自身的潜力,无论是对选手本身而言,还是对中国拉丁舞项目的发展来说都是很大的损失。
如何很好的解决拉丁舞选手的膝关节损伤问题,将对拉丁舞选手在各种大赛上取得优异运动成绩产生重要的影响。
目前,国内的研究人员对运动损伤方向的问题进行了多角度的分析,这些研究大都存在一个问题,即只是从一个或几个方面来研究运动损伤的致伤因素,但并没有将所有可能的影响因素放在一个框架内去进行整体的研究,也没有说明哪些影响因素是显著地影响因素,哪些是次要的影响因素,致伤因素只能通过经验去证实,无法通过数据去验证。
开发和验证膝关节的计算模型,用于评估骨关节炎的治疗
开发和验证膝关节的计算模型,⽤于评估⾻关节炎的治疗作者:R. Mootanah,a,b,* C.W. Imhauser,c F. Reisse,a D. Carpanen,a R.W. Walker,a M.F.Koff,d M.W. Lenhoff,bS.R. Rozbruch,e A.T. Fragomen,e Z. Dewan,b Y.M. Kirane,e Pamela A.Cheah,a,f J.K. Dowell,a,f,g andH.J. Hillstroma,b⾻关节炎(OA)是⼀种退⾏性疾病,常常导致严重的疼痛,关节功能丧失,并且是⽼年⼈⾝体残疾的主要原因(Cooper等,2013)。
世界卫⽣组织报告说,OA占全球2002年总死亡⼈数的1%,预计到2015年是⾼收⼊国家残疾(2.5%)的第⼗⼤主要原因(Mathers和Loncar2006)。
在美国和欧洲,⼤约14%的男性和23%的45岁以上⼥性表现出膝关节OA的放射学征象(Valkenburg 1980)。
英国经济对OA的年度总成本估计为120亿英镑(占年度国民⽣产总值的1%)和美国的1855亿美元(Mathers and Loncar 2006)。
关节错位(Joint malalignment)是OA发展和进展的有⼒预测指标(Petersson and Jacobsson2002)。
没有⼀个明确的治愈⽅法,⽬前的治疗⽅法不能阻⽌或逆转OA的疾病进展。
低⾄5°内翻排列不齐,增加了总膝关节负荷内侧室的压⼒,从70%到的90%(Tetsworth和Paley1994)。
轻微的不对齐可能会引发恶性循环,增加的隔室压⼒会产⽣更多的松弛和关节畸形,从⽽增加不对称的过程(Coventry 1965,2001)。
Sharma等⼈的⼀项前瞻性研究(2001)提出,如果以姑息⽅式治疗,膝关节OA可在短短18个⽉内发展(Sharma等,2001)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2015年西南财经大学数学建模校赛人体膝关节运动学问题参赛队员信息姓名专业年级学号电话邮箱2015/5/41460.655123.0532 1.293931.59040.1314y x x x ω=-+++-人体膝关节运动学问题摘要:对于问题一,分析对峰力矩的影响因素及其影响大小。
首先处理了数据中的异常和缺失数据,用excel 做出了各变量相对于峰力矩的散点图,发现速度对其影响不受其他变量干扰,求出其它变量在不同角速度下与峰力矩的相关系数。
结果是年龄,左右脚与峰力矩相关系数极小;身高,峰力矩角度与峰力矩相关性不大;峰力矩角度与峰力矩是测试系统同时生成的观测指标,不能作为自变量。
性别x1,体重x4,屈伸膝x6,角速度w 与峰力矩y 的相关系数分别为0.571075,0.5195775,0.48212,-0.49915。
对相关性较强的变量建立多元回归分析模型,用matlab 软件解得方程为对于问题二,分析人胫股关节接触力与屈膝角度、身体各部位倾斜度的关系。
我们将身体简化为以胯和膝两处为转折点,躯干、大腿、小腿为三段均匀杆的模型,杆的宽度是膝盖的宽度。
假设人体质量均匀分布与长度正相关。
(1)人的重心落在脚的地面的接触点上,过重心垂线两侧质量相等(两侧杆长度之和相等)。
(2)胫股关节接触力力矩等于重力力矩。
(3)查找资料确定人体各关节活动角度范围,完成模型建立。
用LINGO 软件求解得胫股关节最大接触力是体重的7.1倍。
此时人体姿势为大腿与地面水平,与小腿夹角为45º,小腿与地面夹角为45º,腰部与水平面夹角为80.12º。
对于问题中的说法验证结果为人体屈膝30º,膝关节承受压力是体重的1.54641倍;屈膝60º,膝关节压力为体重的4.0926倍;屈膝90º,所承受的压力是体重的6.44204倍。
在一定误差范围下说法是正确的。
对于问题三,分析人体在上下台阶时胫股关节接触力与腿部动作速度的关系。
(1)沿用问题二中均匀杆模型,建立力矩平衡方程。
(2)假设始终单腿承重,重心落在承重腿与地面接触点上。
取上(下)一级台阶时间为一周期,完成承重腿由弯曲到直立(直立到弯曲)的动作。
根据非承重腿刚离开(接触)地面时与地面和垂线构成直角三角形建立方程。
(3)首先研究小腿与垂线角度,列出其与时间的关系式,再找到力与该角度关系,用LINGO 解出力最大时的角度,确定当时测试者的姿势。
LINGO 的结果显示上下楼梯胫股关节接触力最大时姿势相同,在小腿与竖直面的夹角为41.38º膝盖受力最大,力为5505.44N ,是体重的7.86倍,平均受力为2752.72N 。
对于问题四,定性分析了在举重过程中胫股关节接触力与其产生的对上半身支撑力的关系。
建模后并进行两次修正。
模型一中沿用问题三中均匀杆模型,根据大小腿在水平方向上分量相同建立联系,又根据虚功原理(膝盖水平方向做功等于支撑力竖直方向做功)列出支撑力'G 与胫股关节接触力N关系式:1tan 'sin N G b αα=,从中看出大腿与地面垂直时即使N 很小'G 也趋于无限大。
模型二修正了模型一中N 为恒力的假设,得出121()sin 'sin 1b N N c G b αα+=,可见'G 有一极限值,同时'G 不仅与大小腿拉力有关还与大腿弯曲角度成正弦而非正切关系。
模型三保持踝关节位置不变,修正了模型二中关于膝盖位移沿水平方向的假设,修正后结果11122212sin '(cos cos )sin sin()G N N αααααα=++。
关键词: 回归模型 人体均匀杆模型 优化问题 胫股关节 受力分析1.问题重述1、膝关节力量的测试分析采用CON-TREX 等速测力系统采集实验数据:选择膝屈/伸两个实验项目,进行四种方案测试:静止130°用力、运动60º/s、180º/s、300º/s,分别进行5次。
测试者上身进行固定,要求双手握住两侧扶手,测试时必须用尽全力。
测试数据见文件:data1:数据项包括:测试者编号、性别(1男2女)、年龄、身高、体重、左/右腿(1左2右)、屈/伸(1伸2屈)、静止130º峰力矩、60º/s峰力矩、60º/s峰力矩角度、180º/s峰力矩、180º/s峰力矩角度、300º/s峰力矩、300º/s峰力矩角度。
试分析测试数据有那些特征,即:峰力矩的值与那些因素有关,以及关系的强弱。
2、膝关节承重分析体重负荷下,胫股关节接触力随屈膝角度增大而增加。
有资料显示,人体屈膝30º,膝关节承受压力和体重相等,屈膝60º,膝关节压力为体重的4倍,屈膝90º,所承受的压力是体重的6倍。
试建立数学模型,分析在体重负荷、静止、双脚支撑状况下,胫股关节接触力与屈膝角度、身体各部位倾斜度的关系,确定最大胫股关节接触力及对应的屈膝角度、小腿等的倾斜度。
并说明上段说法是否正确(可在一定误差下)。
3、台阶运动对膝关节的影响爬楼梯属于负重运动,上下台阶时下肢各关节的运动幅度、关节负荷以及肌肉活动等均与在平地上静止、行走有差异,膝关节起主要承重和缓冲作用。
有资料显示,正常人在爬楼梯时膝关节承受的压力会在瞬间增加3倍。
即,一位体重为70公斤的人在爬楼梯时其两侧膝关节所承受的压力则高达280公斤。
同时,爬楼梯速度越快,膝关节承受的压力就越大。
考察台阶:长90 cm、宽28 cm、高18 cm,测试者:170cm、70kg,速度:96 步/分。
试建立数学模型,分析上下台阶时,胫股关节接触力与上下楼梯时腿部动作、速度等的关系。
分析上下楼梯是否有差异、上下楼梯最大膝关节压力各是多少、平均膝关节压力各是多少。
并说明上段说法是否正确。
4、运动对膝关节的影响若时间容许的话,请选取步行(例如快步走)、武术(例如太极拳)、球类(例如篮球)、田径(例如跳远)等一个或多个运动项目,对运动对膝关节的影响进行进一步讨论。
2.问题分析2.1问题1分析对峰力矩的影响因素及其影响大小。
这可以看成是多元回归模型。
我们先用插值法处理了数据中的异常数据,求出每个变量相对于峰力矩的相关性。
发现年龄,身高,左右腿,峰力矩角度与峰力矩相关性不强,将其从回归中剔除。
同时用Excel散点图发现在不同的角速度下峰力矩的变化趋势几乎一致,说明角速度对峰力矩的影响不受其他因素的干扰,故先分析一种速度下其他因素对峰力矩的影响。
最后加入角速度因素并对模型进行优化。
2.2问题2求出膝关节最大受力的情况。
这可以看成是优化模型,并且运用了力学受力原理。
可以将人体简化为三段轻杆(小腿,大腿,躯干)和2个节点(膝关节,腰)的受力模型。
通过受力分析建立方程,用LINGO 求解。
2.3问题3分析膝盖在上楼下楼时所受的压力。
可以看成是优化模型,运用力学受力原理,延用问题2 的假设,以一步为周期,建立有关力学模型,用LINGO 求解。
2.4问题4分析人体在举重时胫骨关节的受力和人体产生的支撑力的关系。
做定性分析,延用问题2的假设,建立有关力学模型,求出表达式。
3 模型假设1) 假设统计的数据真实有效,与现实无偏差;2) 假设实验对象除了给出的变量以外其他情况完全相同;3)人体在力学研究中简化为大腿,躯干,小腿三部分,股,膝为两处折点;4)人体在力学研究中质量均匀分布,重心在经过脚的与地面垂直的线上;5)人体在上下楼运动中完成一个周期后的姿势不变;6)人体重心在上下阶梯换承力腿时瞬间转移到承力腿上。
4 符号说明1234567,,,,,,x x x x x x x :性别,年龄,身高,体重,左右腿,伸屈膝,峰力矩角度 ω:运动角速度y :峰力矩值,,a b c :分别表示躯干,大腿,小腿的长度1a :躯干在重心线左边的长度 2a :躯干在重心线右边的长度α:小腿与地面夹角β:大腿与水平面的夹角γ:躯干与水平面夹角F :膝盖所受到的压力1F :肌力2F :重力1l :肌力的力臂2l :重力的力臂1N :大腿对膝关节的拉力2N :小腿对膝关节的拉力d :膝关节的受力宽度m :人体质量g :重力加速度θ:上楼运动中年小腿与竖直面夹角0θ:上楼初始状态时小腿与竖直面夹角δ:下楼运动中小腿与竖直面夹角t δ:下楼末状态时小腿与竖直面夹角h :台阶的高度k :台阶的宽度v :人体运动速度'G :支撑力0m g :举重时的物重dx :举重时膝关节水平方向上的位移dy :举重时主动力'G 的虚位移dr :举重时主动力12,N N 的虚位移N :经股关节所受的横向力恒力x N :经股关节所受的横向力变力,12,N N 在X 方向上的合力0s :人体脚掌长度s :改进后重心线与后跟接触点距离5模型建立与求解5.1问题一模型的建立和求解5.11数据处理根据分析,文件data1中出现三个异常值,分别为M8缺失(第一位测试者在右膝屈膝情况下第二次测得300º/s 峰力矩),K29缺失(第二位测试者在左膝伸膝情况下第三次测得180º/s 峰力矩),H74数值异常(第四位测试者右膝伸膝情况下的第四次静止130º峰力矩)。
对于缺失数据,用插值法进行修正,取相同情况下测试的其他几组数据的平均值作为修正数据,修正后的结果分别为66.47(M8),112.70(K29);对于异常数据(7777.72)直接修正为(77.72)。
为求结果的精确,将每位测试者4种情况(左腿伸膝,左腿屈膝,右腿伸膝,右腿屈膝)下测试的五组数据取其平均值作为最终数据。
5.12模型建立和求解峰力矩受到多个变量的影响,适用于多元回归模型。
首先用Excle 软件绘制不同角速度下的峰力矩折线图(图1)。
图1 不同角速度下的峰力矩折线图分析发现角速度对于峰力矩的影响不受其他变量的干扰,曲线变化趋势基本一致。
故在分析其他变量对峰力矩的影响时可以逐个分析每一个角速度下的影响。
然后用Excel2013版中correl(arrange1,arrange2)函数求出每个变量对应的相关相关系数性别x1 年龄x2 身高x3 体重x4 左右脚x5 伸屈膝x6 角度x7 静止 0.5904 -0.0602 0.4217 0.5012 -0.040 0.530960 0.5437 -0.0678 0.3787 0.5134 0.0101 0.5687 -0.3936 180 0.5525 -0.0725 0.3747 0.5486 0.0921 0.5215 0.2239 300 0.5941 -0.0675 0.4218 0.51492 0.0739 0.30717 0.3438分析发现年龄,身高,左右脚与峰力矩相关性过弱,不将其作为模型的有效变量。