基于FPGA的二值图像连通域标记快速算法实现
基于delta机器人的目标图像识别与动态抓取系统设计
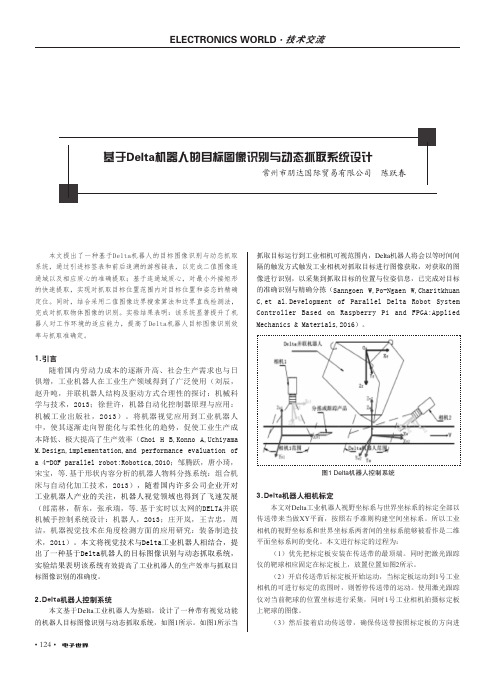
图3 目标图像二值化后的效果
(2)获取抓取目标图像的连通区域 图像连通区域的获取主要是对相同区域的像素进行统一标记,
以便于对区域内抓取目标的准确识别和精确定位。本文使用的是一
种以游程编码为基础的抓取目标连通域的提取算法,按照8个领域 连通的规则依次对所有的游程进行排序,以此完成对待抓取图像连
4.动态抓取目标图像的获取 4.1 抓取目标图像的预处理
(1)本文对获得的目标图像使用3x3的均值滤波器进行滤波处理 滤波处理表达式为(Zhao Q,Wang P,Mei J.Controller Parameter Tuning of Delta Robot Based on Servo Identification:Chinese Journal of Mechanical Engineering,2015):
ELECTRONICS WORLD・技术交流
基于Delta机器人的目标图像识别与动态抓取系统设计
常州市朋达国际贸易有限公司 陈跃春
本文提出了一种基于Delta机器人的目标图像识别与动态抓取 系统,通过引进标签表和前后追溯的游程链表,以完成二值图像连 通域以及相应质心的准确提取;基于连通域质心,对最小外接矩形 的快速提取,实现对抓取目标位置范围内对目标位置和姿态的精确 定位。同时,结合采用二值图像边界搜索算法和边界直线检测法, 完成对抓取物体图像的识别。实验结果表明:该系统显著提升了机 器人对工作环境的适应能力,提高了Delta机器人目标图像识别效 率与抓取准确定。
on Disturbance Observer of Delta Robot with Gravity
Compensation:Applied Mechanics & Materials,2015)。假
数字图像处理课程设计-基于图像处理的车牌识别技术
《数字图像处理》课程设计报告设计题目:基于图像处理的车牌识别技术学院:xxxxxxxxxxxxxxxx专业:xxxxxxxxxxxxxxxxxxxxxxxxxxx姓名:xxxxxxxxxxxxxxxxxxxxxxx学号:xxxxxxxxxxxxxxxxxxx指导教师:xxxxxx2015 年xx 月xx 日摘要智能交通系统已成为世界交通领域研究的重要课题,车牌识别系统作为智能交通系统的核心,起着非常关键的作用。
目前,图像处理技术在车牌识别中的应用研究已经成为科学界的一个重要研究领域。
本课程设计旨在粗浅地运用所学基本原理和知识分析数字图像处理技术在友好环境下的应用(所选车牌识别的车辆图片均为友好环境下,易于处理的实验图片,不具有广泛性)。
以车牌为研究对象,主要研究如何通过图像的预处理、车牌的定位、车牌字符分割和字符识别等一系列过程,完成车牌的识别。
关键词:智能交通、数字图像处理、车牌识别ABSTRACTIntelligent transportation system has become an important research topicin the world of transportation, license plate recognition system as thecore of intelligent transportation system, plays a key role. At present,the application of image processing technology in vehicle license platerecognition has become an important research area of the scientificcommunity.This course is designed to scratch the surface and apply the knowledgeto analyze the basic principles of digital image processing technologyin a friendly environment (experimental vehicle license platerecognition image selected pictures are environment-friendly, easy tohandle, does not have the breadth) . With license plate for the study,the main research how image preprocessing, license plate and licenseplate character segmentation and character recognition process and aseries of complete license plate recognition.Keywords:smart transportation 、Image Processing 、License Plate Recognition目录1、绪论 (4)1.1问题提出 (4)1.2背景及现状分析 (4)1.3目的及意义 (5)1.4开发工具 (5)2、系统设计 (5)2.1总体设计方案 (5)2.2流程图 (5)2.3模块功能分析 (6)2.3.1图像预处理 (6)2.3.2车牌定位 (8)2.3.3字符分割 (8)2.3.4字符识别 (10)3、系统结果分析 (12)3.1本系统结果分析 (12)3.2本系统的不足 (12)4、课程设计总结 (13)5、课程设计体会 (13)6、参考文献 (13)7、附录 (14)1、绪论伴随着工业的迅速发展,城市化的进展和汽车的普及,世界各国的交通量急剧增加。
基于FPGA的二值图像连通域快速标记

基于FPGA的二值图像连通域快速标记汪滴珠;安涛;何培龙【摘要】针对连通域标记算法运算量大、速度慢、硬件实现困难的缺点,提出一种适于现场可编程逻辑门阵列(FPGA)实现的二值图像连通域快速标记的算法,并用VHDL硬件开发语言在XILINX公司的FPGA上实现.实验结果表明了该算法能对二值图像复杂的连通关系正确标记,易于硬件实现,大大节约了硬件资源,电路结构简单,满足实时性要求.%In order to solve the prablems of low speed large computation and difficult hardware implementation of connected component labeling, a connected component fast labcling algorithm of binary image lageling applicable for field programmable gate array (FPGA) is proposed, which is implemented by VHDI. hardware description language based on FPGA platform of XILINX corporation. Experimental results show that the proposed algorithm can label binary image with complex connections correctly, implement hardware easily,save more hardware resource and meet real-time demands.【期刊名称】《现代电子技术》【年(卷),期】2011(034)008【总页数】3页(P115-117)【关键词】FPGA;二值图像;连通域;快速标记【作者】汪滴珠;安涛;何培龙【作者单位】中国科学院,光电技术研究所,四川,成都,610209;中国科学院研究生院,北京,100039;中国科学院,光电技术研究所,四川,成都,610209;中国科学院,光电技术研究所,四川,成都,610209【正文语种】中文【中图分类】TN919-34;TP391连通域标记算法是图像处理、计算机视觉和模式识别等领域的基本算法,它可以对图像中不同目标标上不同的标记,进而提取、分离目标,确定目标的特征和参数,从而对目标进行识别和跟踪。
一种易于实现的适于细胞图像连通区域的标记算法_喻杰

第15卷第2期2005年4月江苏大学学报(医学版)Journa l of Ji angsu U niversity(m ed i c i ne)V o.l15N o.2A pr.2005一种易于实现的适于细胞图像连通区域的标记算法喻杰,许化溪(江苏大学医学技术学院,江苏镇江212001)[摘要]目的:为了实现简化细胞图像连通区域标记算法,本研究结合当前的应用情况提出了一种基于递归技术并适合于细胞图像目标区域的标记算法,探讨了其应用于白细胞计数的可能性。
方法:常规瑞氏染色光镜下人工计数白细胞;应用计算机和CCD相机采集血涂片细胞图像,细胞标记递归算法进行细胞图像处理并计数白细胞。
结果:此算法只需要一次扫描就可完成标记过程,因此算法的实现比经典的像素标记算法大大简化。
应用该算法对19份血涂片样本进行标记,取得了较为满意的效果。
本文还对区域标记时应注意的问题进行了讨论。
结论:本研究应用递归过程建立的细胞图像连通区域的标记算法,适于在尚不发达地区实现白细胞计数的计算机化,也为应用计算机进行医学形态学研究提供了思路。
[关键词]细胞图像;图像分割;连通区域[中图分类号]R446[文献标识码]A[文章编号]1671-7783(2005)02-0152-03 An Achievable A lgorith m Suitable to Cell I m age Connected A reaYU J ie,XU H ua-xi,WANG Sheng-jun(S chool ofM ed icalT echnol ogy,Jiangsu U n i versit y,Zhen ji ang J i angs u212001,Ch i na)[Abstract]Objective:I n order to si m ple t h e realization of connected co m ponent labeli n g algo rithm,a connected co m ponent labeling algorith m based on recursi o n is presented i n th i s st u dy,it m ay be useful for w hite blood cell(W BC)coun.t M et hods:W right sta i n i n g w as used to countW BC artific ially by m icr osco-py.C o mpu ter and CCD ca m era w ere app li e d to take the picture of b l o od cells fro m b l o od s m ear and the cell i m age w as treated usi n g t h e a l g orit h m of cell labeli n g recursion.R esults:Th is a l g orit h m can co m plete the labe li n g w ith on l y one ti m e o f scann i n g,so the realization of the algorithm w as m ore si m pler than that o f the classic p i x e l labeling.App lying this algor ithm in labe li n g n i n eteen sa m ples of b lood ce ll flake obta i n ed sa-t isfy i n g effec.t Concl u sion:The algo rithm is su itable fo r co m puterizi n gW BC coun t i n a less developed area, it a lso he l p to bri n g about co m puter application on m ed ica lm or pho l o g ic stud ies.[Key w ords]Ce ll i m age;I m age seg m enta ti o n;Connected area生物医学研究有一个显著的特点)))海量信息,现代众多的医学研究都需要借助计算机,这是因为计算机有着高速,准确的信息处理能力。
matlab 二维坐标数组求解连通区域-概述说明以及解释
matlab 二维坐标数组求解连通区域-概述说明以及解释1.引言概述部分的内容可以如下编写:1.1 概述在数字图像处理和计算机视觉领域中,连通区域是常见的概念,它代表了具有相同像素值或特定属性的像素的集合。
本文将主要介绍使用MATLAB对二维坐标数组进行连通区域的求解方法。
二维坐标数组是一种常见的数据结构,用于存储和表示二维平面上的图像、地理信息等。
连通区域的求解在许多应用中都具有重要意义。
例如,在图像处理中,我们经常需要对目标进行分割和提取,而连通区域的求解可以帮助我们实现这一目标。
此外,在计算机视觉领域,连通区域的应用也非常广泛,如对象识别、目标跟踪等。
在正文部分,我们将首先介绍二维坐标数组的定义和特点,包括如何表示和访问数组中的元素。
然后,我们将详细解释连通区域的概念和应用,以及常见的连通区域求解算法和技术。
最后,在结论部分,我们将总结本文所介绍的二维坐标数组求解连通区域的方法,并给出相关实验结果和分析。
通过本文的阅读,读者将能够了解和掌握使用MATLAB对二维坐标数组进行连通区域求解的方法和技巧,从而在实际应用中能够灵活运用和扩展相关算法。
希望本文能够对读者在数字图像处理和计算机视觉领域的学习和研究工作有所帮助。
文章结构部分可以根据文章的主要内容和逻辑,介绍文章的主要章节和各个章节的内容概要。
下面是1.2 文章结构部分的内容示例:1.2 文章结构本文将按照以下结构进行叙述:第二部分:正文本部分主要介绍了二维坐标数组的定义和特点,并深入探讨了连通区域的概念和应用。
首先,我们将对二维坐标数组进行详细的定义,并解释其在实际问题中的应用。
其次,我们将介绍连通区域的概念和特点,并展示其在图像处理、地理信息系统等领域的广泛应用。
第三部分:结论本部分将重点讨论二维坐标数组求解连通区域的方法,并对实验结果进行分析。
我们将介绍一种有效的算法,基于二维坐标数组的特点,实现连通区域的快速求解。
同时,我们将通过实验结果验证该算法的准确性和效率,并分析不同参数对算法性能的影响。
基于链表的图像连通区域提取算法
该像 素所 在 的 目标段 进 行 标 记 ( 图 1 示 的 目标 如 所
段① ) 并将该段对应的段结 点加入到区域链表结 ,
本文算法 的具体流程如下。 1 从 左 到 右 、 上 往 下 扫 描 图像 , 先 找 到第 ) 从 首 个 未被 标记 的像 素 点 。
一
35 ~
m n 数据结构中加入 Sa 数据域 , et cn 用于标识该段邻 域 的扫描方式 , Sa 当 cn== x 1 00 时表示该段的上邻 域不 用扫 描 , Sa = x2时 表示该 段 的下 邻 域 当 cn= O0 不用 扫 描 , Sa =O 0 当 cn= x3时 表示 其 上 、 邻 域 均 下 不用 扫 描 。在 扫 描 过 程 中通 过 判 断 该 标 识 来 决 定 该扫描哪些邻域 , 这样就可 以减 少扫描 的次数 , 提 高算法 效率 , 特别 是 对 于类 似矩 形 的有 规 则 连通 区 域 , 率 的提高 更 明显 , 验结 果见 表 1 效 实 。
表 1 对 不 同 图像 的 连 通 区 域 进 行 提 取 的 结 果 图 3 链 表存 储 的 组 织 结构
2 扫描 并标 记该 像素 所 在 的段 ( 图 1所 示 的 ) 如 目标 段 ① ) 新 生 成 N w ei Cn etein类 , e R g n( oncR g o o
12 2 算法 的流程 描述 ..
算 法对二 值 图像 从 左 到 右 、 上往 下 的方 式 进 从 行 扫描 , 扫 描 到 一 个 没 有 被 标 记 过 的 目标 像 素 当 时, 即为 一个 新 的 连 通 区域 的 开 始 , 该 区 域 建 立 为
一
个 新 的 区 域 结 点 , 入 到 区域 链 表 中。接 着 , 加 对
针对基于FPGA的视频图像预处理的算法研究
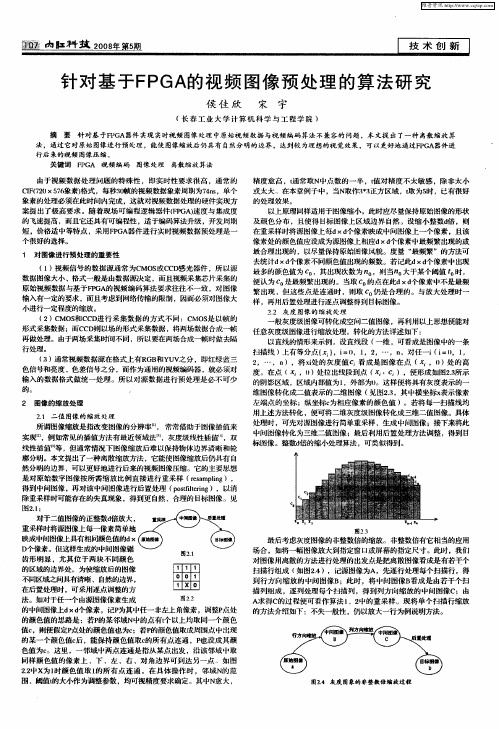
扫描线 ) 上有等分点 ( ) =O ,2 置 ,i ,l ,…,n 。对任- i i O , - ( = ,l 2 ,… ,n ),将 x 的灰度值 c 看 成是 图像在 点 ( ) 的高 i 处 X ,0 处 度 。在 点 ( ) X ,0 处拉出线段到点 ( c ),便形成 如图2 所示 X , . 3 的阴影 区域 ,区域 内部值为 l ,外部为0 。这样便将具有灰度表示 的一
2 图像 的缩放处理
21 二值 图像 的 缩 放 处 理 .
所谓 图像缩放是指改变图像的分辨率” 常常借助于图像插值来 , 实现 ,例如常见的插值方法有最近领域法 ,灰度级线性插值‘ “ ,双 线性 插值 ,但通常情况下 图像 缩放后难 以保持物体边界 清晰和轮 等 廓 分明。本文提出了一种 离散缩 放方法 ,它能使 图像缩放后仍具有 自 然分明的边界 , 以更好地进行后来 的视 频图像压缩 。它的主要思想 可 是对 原始数字图像按所需 缩放比例直接 进行重采样 (ea pi rs l g m n 1, 得到 中间图像 ,再对该 中间图像进行后置处理 ( otl r g p si e n ),以消 ft i 除重采样时可能存在 的失 真玛 象,得到更 自然 合理的 目 图像。见 I ! 标
维普资讯
南 曩 料 技 2o 年第5 工 o8 期
技 术 创 新
针 对 基 于F 的视 频 图像 预 处 理 的算 法 研 究 GA P
侯 佳 欣 宋 宇
(长 春 工 业 大 学 计 算 机 科 学 与 工 程 学 院 1
摘 要 针对基 于F G 器件 实现 实时视频 图像 处理 中原始视 频数据 与视 频编码算法 不兼容的 问题 ,本 文提 出了一种 离 缩放算 P A 散 法,通过 它对原始 图像进行预处理 ,能使图像缩放后仍具有 自然分明的边界 ,达到较 为理想的视 觉效果,可以更好地通过F G P A器件进 行后来的视频 图像压缩。 关键 词 F GA 视 频 编 码 图 像 处 理 离散 缩 放 算 法 P 由于视频数据 处理 问题 的特殊 性 ,即实时性 要求 很高 ,通常的 CF7 0 6 I( 5 象素) ,每秒3 的视频数据象素周期为7 n 。单个 2x7 格式 【 麒 4s 象素 的处理必须在此时问内完成 ,这就对视频数据处理 的硬件实现方 精 度愈高 ,t 通常取N 中点数 的一半 ,t 值对精度 不太敏感 ,除非太小 或太 大.在本 章例 子中 ,当N 取作3 3 * 正方区域 ,诹 为5 时,已有很好
一种基于链表的二值图像像素标记改进算法
T NOLO GY TR N D1引言提取目标的各种特征量常应用于图像处理,其算法包括像素标记算法、游程连通性算法等。
像素标记算法与游程连通算法不同的是,它不需要事先对图像进行处理,就可以对二值图像进行标记,过程极为简便,但传统的像素标记算法通常需要对二值图像执行二次扫描。
目前,已有很多文献对上述算法进行了改进:文献[1]引入了在区间树上查找的方法,对邻接表和映射表的处理过程做了简化。
文献[2]在像素标记算法的基础上进行了标记矫正,将消除重复标记的操作融入到第一次扫描过程中,使获得的计算结果其等价标记非常少。
文献[3]提出了一种顺序扫描二值图像标记的算法,增加回溯扫描算法对选择的两种典型情况的标记进行处理,并对其他情况的标记冲突进行了分析说明,提高了标记的准确性。
但这些算法最终的连通归属关系要经过不断跟踪扫描,其收敛性有较大震荡。
本文提出了一种改进的算法,它基于区域增长法和线标记法,采用链表进行处理,不会出现标号冲突的情况,并且只需对指针进行操作,非常快捷、简单,为进一步计算目标的其他特征量提供了充分的条件。
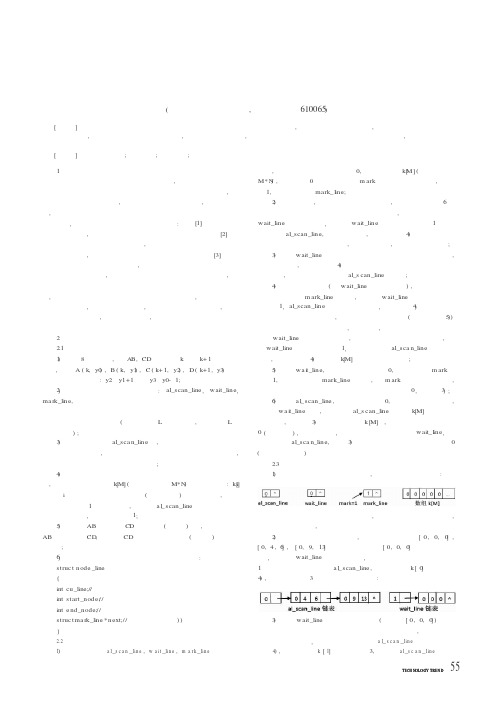
2改进的标记算法2.1算法的相关定义1)采用8邻域连通,设A B ,CD 分别为第k 行和k+1行的两条线段,其中A (k ,y0),B (k ,y1),C (k+1,y2),D (k+1,y3)。
两条线段连通的准则是:y2≤y1+1并且y3≥y0-1;2)本文中定义三个链表指针:al_scan_line ,wait_line ,ma rk_li ne ,其中第一个链表用于记录扫描后未进行任何处理的直线段情况。
第二个链表用于记录用于“区域种子”的直线段情况。
第三个链表是已经标记的直线段链表(如果图像有L 个连通区域,则将产生L 个这样的链表);3)规定直线段链表al_sca n_line 中,各个节点的存取是按照行值从小到大的存取操作,即行值小的插入到行值大的前面。
若行值相同,则按照线段的起始点纵坐标进行存取操作;4)为了标记某行是否已经扫描和记录已扫描行的未处理直线段数目,文中申请了一个数组k [M](图像的大小为M*N )。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于FPGA的二值图像连通域标记快速算法实现
1 引言
在图像自动目标识别和跟踪过程中,首先对图像目标进行阈值分割提取,得到的二值图像通常包含多个连通区域,系统利用图像目标的形状特性对可疑
高威胁的飞行目标进行自动识别。
因此,需要对各连通区域块进行分别检测判断,本文采用改进的适合FPGA 实现的快速标记算法对各连通域进行检测提取。
实现二值图像连通体检测通常采用的方法有下几种[1] [2] [3]:区域生长法:首先对图像进行逐行(列)扫描,每遇到一个未标记的“1”像素点,就分配其
一个未使用过的标号,然后对其领域进行检测,如有未标记过的“1”像素,则赋予相同的标号。
反复进行这一操作.直到不存在应该传播标号的“1”像素。
然后继续图像行(列)扫描,如检测判未标记的“1”像素则赋予其新的标号,并进行与
以上相同的处理。
整个图像扫描结束,算法也就终止。
这种方法可准确地检测
出各种类型的连通体.但处理时间也较长.因为要逐一检测每一“1”像素的邻域,且出现“1”像素的重复扫描。
跟踪算法:二值图像中每个取值为“1”的像素被标
记一个与其坐标相关的标号,如由n,m 串构成的数。
热后,扫描标记后的图像,并将每十像素的标号改为其邻域内的最小标号。
反复执行这个过程,直到
不需要作标记更改为止。
用这种方法处理小而凸的目标时,收敛速度较慢。
本文以适合FPGA 实现为目的,提出一种具有计算规则性的快速二值图像连通域标记算法。
与传统的二值图像标记算法相比,该算法具有运算简单性、规则性和可扩展性的特点,适合以FPGA 实现。
选用在100MHz 工作时钟下,处理384×288像素的红外图像能够达到400 帧/秒以上的标记速度,足够满足实时目标识别系统的要求。
处理速度可以满足大部分实时目标识别系统的要求。