差分GPS与RTK无验潮在水下地形测量中比较
差分GPS的测量精度及其在水下测量中的应用

差分GPS的测量精度及其在水下测量中的应用摘要:随着时代的进步,GPS这项技术发展迅猛,也越发的成熟,给水下测量的工作提供了有利条件,用户越来越多地利用空间进行移动测量。
全面的定位精度、快速的实时操作和高精度的性能正变得越来越明显。
GPS技术与先进的测深仪技术的相结合标志着水下测量技术质的飞跃,同时也是现代科技与工业生产的一个重要实施。
差分GPS以各种不同的差分模式运行,由于测量精度的差异性,在水下工程得到广泛的运用,这对于水上运输项目的水下地形测绘至关重要。
关键词:差分GPS;RTK;信标;星站差分;水下测量引言:近年来,随着GPS相位差载波(RTK)技术的发展,GPS技术变得越来越先进,并被广泛用于数字测绘。
有时会出现这样的情况:在水运项目的早期建设阶段,由于研究区域通常是山区,能见度低、天气恶劣、地形复杂,可能会给传统的野外测绘带来一些问题。
使用GPS动态定位技术进行快速准确的测绘,可以消除累积误差,使用方便,所需人员较少,并具有其他优势,可以取代原来用平面仪测和全站仪测绘。
很明显这项GPS技术的高速发展让生产力和经济效益已经大大增加。
1.差分定位原理DGPS(差分全球定位系统)的工作原理是两个GPS接收器安装在两个站点上,对同一个GPS卫星的导航信号进行同步测量,基站根据已知的坐标对所观察的数据进行修正,并不断将所观察的数据传送给移动站,移动站实时修正其观测值,以确定准确位置。
水下地形图绘制通常用于水利工程项目的建设。
水下测量通常是由测量船进行的,平面测深中心的位置必须与水深一起测量。
差分定位技术为水下测量的平面定位提供了极大的便利。
根据所需的测量精度,可以采用多种不同的定位方法模式,通常情况下常用RTK差分模式、COSS差分模式、星站差分模式和信标差分模式。
2.RTK差分模式RTK(实时动力学)操作是使用RTK型全面高精度GPS接收器进行的。
这一般是一个在已知地点的一个基站并通过无线电台站发射一个差分信号来实现的,该信号可以在离原点几厘米的地方进行测量(假设固定解决方案被锁定并静止几秒钟),并被广泛使用。
无验潮模式下的GPS水下地形测量的应用[]
![无验潮模式下的GPS水下地形测量的应用[]](https://img.taocdn.com/s3/m/f3f9e6c23186bceb19e8bb54.png)
无验潮模式下的GPS水下地形测量的应用[]摘要:本文介绍了无验潮模式下GPS水下地形测量的工作原理,着重分析了船体姿态对测量精度影响,归纳总结了该模式下水下地形测量的工作流程和提高测量精度的相关措施,同时结合工程实例验证了无验潮模式下的GPS水下地形测量符合绘制大比例尺地形图的精度要求。
关键词:无验潮模式;GPS;水下地形测量;精度分析1 引言传统的水下地形测量为了获得每一时刻的潮位,需设立验潮站以进行验潮观测,将观测的潮位资料进行内插,以作为水下地形点高程的起算面。
此方法工作量大,并且当测区超出验潮站的有效作用范围时将难以获得水下地形高程数据。
随着OTF技术的日益成熟, 整周模糊度可以在很短的时间内被精确确定, 从而保证了GPS载波相位实时差分技术(RTK)能够在动态环境下获得厘米级的水平定位精度和高程定位精度[1]。
这使得在无验潮模式下采用GPS-RTK进行水下地形测量成为可能。
本文通过不同水域的工程实例论证采用GPS-RTK作业方式的可行性与可靠性,并且详细叙述了水下地形测量的作业步骤。
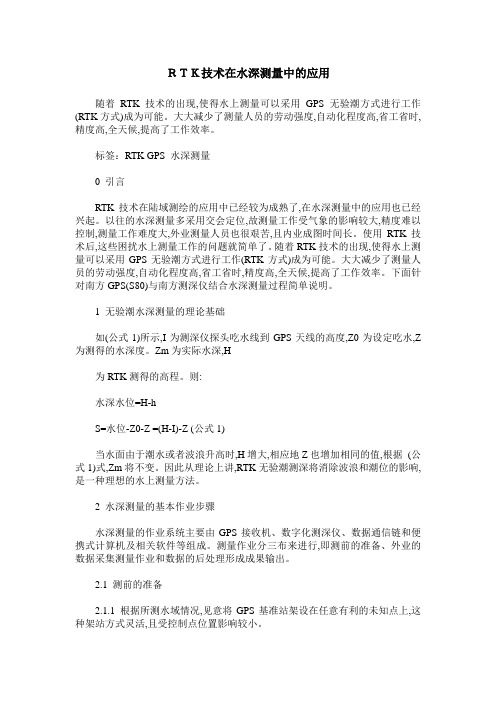
2 无验潮模式的水下地形测量原理与方法2.1 工作原理在无验潮模式下,在已知点上架设基准站,同时将GPS流动站架设于换能器正上方,利用GPS差分测量精确获取流动站相对基准站的相对高差,并通过该相对高差反求流动站的GPS相位中心的高程,利用测量所得的GPS高程以及测深数据,从而求出水底地面高程[2]。
测量原理如图1所示,图1中,已知点的正常高为,基准站天线高,流动站天线高(GPS天线相位中心到换能器的垂距),测深数据为,基准站GPS天线处的大地高和正常高分别为,,流动站GPS天线处的大地高和正常高分别为,,高程异常为。
由图1可知,基准站、流动站天线相位中心的正常高为:(2)式中为换能器相对于高程基准面的瞬时高程。
当基准站与流动站之间的距离不是很远(30KM以内) 时,则下式成立(3)顾及式(1)、(2),则为(4)故水底地面的高程为(5)上述测量方法摒弃了传统的潮位观测,实施操作起来简单、快捷,大大提高了工作效率。
GPS RTK无验潮测深在水下地形测量中应用
GPS RTK无验潮测深在水下地形测量中的应用摘要:gps rtk无验潮测深在水下地形测量中的应用,大大减少了测量人员的劳动强度,自动化程度高,省工省时,精度高,全天候,提高了工作效率,使工程变得更经济。
本文首先阐述了gps rtk 技术水下地形测量的原理,其次,分析了rtk无验潮水深测量时的注意事项。
同时,以一应用实例为例,对其进行深入的探讨,具有一定的参考价值。
关键词:gps rtk;无验潮测深;水下地形测量1.前言无验潮水下地形测量是利用gps rtk技术结合数字测深仪测量水深的一种方法。
该方法可按距离或时间间隔,自动采集rtk确定的三维位置及水深数据,只要将gps天线高量至水面,对测深仪进行吃水深度改正,便可高精度、实时、高效地测定水下地形点的三维坐标。
不用进行验潮改正大大减少了测量人员的劳动强度,自动化程度高,省工省时,精度高,全天候,提高了工作效率,使工程变得更经济。
2.gps rtk技术水下地形测量的原理gps rtk(real time rinematic)实时动态定位技术是一项以载波相位观测为基础的实时差分gps测量技术,它是利用2台或2台以上的gps接收机同时接收卫星信号,其中1台安置在一个固定的地方以作为基准站,其它作为流动站,这样基准站的电台连续发射差分数据,流动站上连续接收数据,流动站上就可实时计算出其准确位置,通过计算机中软件获取测深仪的数据,并自动滤波,形成水下地形原始数据,这种方法测量的平面位置精度能够达到厘米级,高程精度一般能够达到小于10 cm,对于测量水底地貌完全足够。
3.rtk无验潮水深测量时的注意事项rtk无验潮测深技术虽已逐步被使用,但是要想得到精确的水深测量图成果,需要考虑诸多因素的影响,只有有效控制每一项影响精度的因素,最终的成果质量才能得到保障。
在使用rtk进行无验潮水深测量时有以下几点注意事项:(1)内河进行无验潮水深测量时应沿河道在已知控制网点上进行比测。
GPS—RTK无验潮测深技术在内河水深测量中的应用

GPS—RTK无验潮测深技术在内河水深测量中的应用本文将对GPS-RTK无验潮测深技术的工作原理及其在水深测量中的应用优势进行阐述,并结合案例进行探讨;对影响测量精度的因素进行分析并提出相应的解决对策。
标签:GPS-RTK无验潮测深技术内河水深测量0引言近年来,随着GPS技术在测绘中的应用,GPS-RTK无验潮测深技术在内河水深测量中已被逐渐的应用起来。
传统内河水深测量一般采取交会定位,受到时空等诸多限制,而GPS技术不受时空等限制实现全天数据采集。
在内河水深测量中适宜的工况下应用GPS-RTK无验潮测深技术,大幅提高了作业效率,实现了操作自动化,提升了测量精度,有效降低了测量人员的工作强度。
1内河水深测量的相关概述1.1 GPS-RTK的工作原理GPS通过精准的定位,把实时性的载波进行相位差分并获得实时动态。
基准站需要观测记录GPS数据,并将坐标数据传输至流动站;流动站同步跟踪观测GPS数据,并把收到的基准站数据输入系统进行分析和处理。
对采集和接收的数据进行实时载波相位差分处理,最后计算出精准的定位信息。
差分处理法是RTK 技术中最为主要的数据处理方法。
1.2 GPS-RTK无验潮测深技术无验潮测深技术包括GPS RTK定位系统和测深系统,定位系统负责采集天线相位中心的当前平面坐标,并根据天线相位中心的高程推算换能器底部的高程;数字化测深仪负责测量换能器底部至河床的水深,通过简单的数学运算即可算出河床底部测量点的平面坐标及高程。
便携式计算机用于设置测深、定位设备进行同步观测记录,内业通过改正形成水下地形图。
2GPS-RTK无验潮测深技术在内河水深测量中的优势GPS-RTK无验潮测深技术大大提高了作业效率和测量精度,实现了厘米级的精度。
无验潮测深技术也不用再进行验潮站的水位记录,对潮位起伏大的水域其测量精度和准度更高。
3某内河水深测量分析3.1测区情况某地区为保护居民和行船的安全拟建一座防波提。
浅谈GPS与RTK技术在水利工程测量中的应用

浅谈GPS与RTK技术在水利工程测量中的应用【摘要】主要阐述GPSRTK技术在水利工程测量中的应用,水利工程测量采用新仪器、新技术的高精度、高效率、简便的测量方法。
主要阐述GPSRTK 技术在水利工程测量中的应用,水利工程测量采用新仪器、新技术的高精度、高效率、简便的测量方法。
【关键词】GPS RTK;水利工程测量;应用;精度;效率1. 前言(1)随着国民经济的快速发展,国家和地方政府对水利工程建设投资的加大,每年都有大批的水利工程建设。
而大多数水利工程都位于偏远地区,高等级测量控制点极少,给水利工程施工测量带来很大困难。
由于全球定位系统(GPS)技术的快速发展,GPS RTK技术广泛应用于测量中,因其精度高、实时性和高效性强,成为最先进的技术设备和最经济的测量方法,在很大程度上提高了工作质量和效率。
(2)我公司2003年购买的徕卡GPS 530测量系统,通过几年的使用,在水利工程测量的加密控制测量、水下地形测量和施工放样等方面,收效甚大,现介绍给大家,供同行参考。
2. GPS RTK基本原理RTK(Real Time Kinematic)测量技术即实时动态测量技术,是以载波相位测量与数据传输技术相结合的以载波相位测量为依据的实时差分GPS测量技术,是GPS测量技术发展里程中的一个标志,它由3部分组成:(1)基准站接收机;(2)数据链;(3)流动站接收机。
RTK工作原理是:在已知高等级点上(基准站)安置1台GPS接收机,对所有可见卫星进行连续的观测,并将其观测数据和测站信息,通过无线电传输设备,实时地发送给流动站,流动站GPS接收机在接收GPS卫星信号的同时,通过无线接收设备,接收基准站传输的数据,然后根据相对定位的原理,实时解算出流动站的三维坐标及其精度。
3. RTK测量的特点相对于传统测量学及GPS常规测量,RTK 测量主要有以下特点:(1)定位精度高。
RTK测量标称精度可达到:lcm + 1ppm(平面),2cm + lppm (高程)。
GPS-RTK无验潮和验潮数据成果比对分析

GPS-RTK无验潮和验潮数据成果比对分析发表时间:2018-12-18T10:34:25.547Z 来源:《基层建设》2018年第33期作者:李凯召1 李玉宁2 [导读] 摘要:传统水下地形测量一般采用人工验潮或者自动验潮仪来获得潮位信息。
中交(天津)生态环保设计研究院有限公司天津 300461 摘要:传统水下地形测量一般采用人工验潮或者自动验潮仪来获得潮位信息。
然而当测量区域较大,而水尺又无法固定,或者超过了水尺控制的作用距离,都不能获得准确的潮位信息。
为了解决这一难题,可采用载波相位差分技术(RTK)获得实时潮位,这就是利用GPS-RTK实施水下地形测绘的无验潮方法。
关键词:GPS RTK 无验潮验潮 1 工程简介巴基斯坦卡西姆发电厂港池与航道疏浚吹填工程是卡西姆港燃煤应急电站项目的配套工程,该项目被列为“中巴经济走廊”的首批项目。
项目位于红树林内部区域,航道两侧都有红树林保护,航道面基本不受风浪、流的影响,只受到涨落潮影响。
航道没有足够的开放水域,巨浪很难发展。
船只航道不受明显的波浪诱导运动,轻量级航运系统扰动由当地风暴和过往的船只引起。
本次试验在该项目的港池中进行。
2 无验潮技术原理图1 水下地形测绘及设备示意图 GPS RTK无验潮水下地形测量的基本思想是利用GPS-RTK测量获得的瞬时三维坐标,结合GPS天线在船体坐标系VFS下的坐标,水面相对于vfs原点的垂直距离,获得瞬时水面的高程。
采用GPSrtk工作模式,开始测量前架好基准站,设置好坐标及电台数据链等,使流动站可以顺利接受到差分信号。
如图1所示,GPS接收机到水面的高度为H0,探头吃水为H1,T1时刻探头测得的水底a点的深度值为h。
通过在GPS中正确设置H0、H1,可以直接得到瞬时水面高程A及瞬时水面A至水底a点的距离。
由此可以得到,水底a点的高程=A-(H1+h),这种测绘方法集潮位与水深测绘于一身,直接获得底的高程。
采用这种方法确定的水位基准高程精度较高,并较好的消除了波浪、潮汐、水位落差等因素对水底高程的影响,大大提高了工作效率。
RTK技术在水深测量中的应用
RTK技术在水深测量中的应用随着RTK技术的出现,使得水上测量可以采用GPS无验潮方式进行工作(RTK方式)成为可能。
大大减少了测量人员的劳动强度,自动化程度高,省工省时,精度高,全天候,提高了工作效率。
标签:RTK GPS 水深测量0 引言RTK技术在陆域测绘的应用中已经较为成熟了,在水深测量中的应用也已经兴起。
以往的水深测量多采用交会定位,故测量工作受气象的影响较大,精度难以控制,测量工作难度大,外业测量人员也很艰苦,且内业成图时间长。
使用RTK技术后,这些困扰水上测量工作的问题就简单了。
随着RTK技术的出现,使得水上测量可以采用GPS无验潮方式进行工作(RTK方式)成为可能。
大大减少了测量人员的劳动强度,自动化程度高,省工省时,精度高,全天候,提高了工作效率。
下面针对南方GPS(S80)与南方测深仪结合水深测量过程简单说明。
1 无验潮水深测量的理论基础如(公式1)所示,I为测深仪探头吃水线到GPS天线的高度,Z0为设定吃水,Z 为测得的水深度。
Zm为实际水深,H为RTK测得的高程。
则:水深水位=H-hS=水位-Z0-Z =(H-I)-Z (公式1)当水面由于潮水或者波浪升高时,H增大,相应地Z也增加相同的值,根据(公式1)式,Zm将不变。
因此从理论上讲,RTK无验潮测深将消除波浪和潮位的影响,是一种理想的水上测量方法。
2 水深测量的基本作业步骤水深测量的作业系统主要由GPS接收机、数字化测深仪、数据通信链和便携式计算机及相关软件等组成。
测量作业分三布来进行,即测前的准备、外业的数据采集测量作业和数据的后处理形成成果输出。
2.1 测前的准备2.1.1 根据所测水域情况,见意将GPS基准站架设在任意有利的未知点上,这种架站方式灵活,且受控制点位置影响较小。
2.1.2 将GPS移动站分别架设在已知点A,B上,设置好参考坐标系、差分电文数据格式、接收间隔,有了固定解后求得四参数,然后校正求得三参数,设站成功,2.1.3 将GPS接收机、数字化测深仪和便携机等连接好后,打开电源。
GPS-RTK结合测深仪在水下地形测量中的应用
GPS-RTK结合测深仪在水下地形测量中的应用摘要随着GPS技术的快速发展,应用于工程测量越来越普及,使用移动测量的用户空间越来越大,方便快捷、高精度和定位准确的性能愈显其优越性,将GPS技术与测深仪技术相结合,是水下地形测量技术的一次飞跃,是先进的科学技术在生产活动中的重要应用。
关键词地下地形测量;测深仪;GPS-RTK1 概述1.1 水下地形测量的重要性随着工程建设的需要和工程开发,越来越多的需要进行水下地形测量,掌握规划、设计的资料,为工程建设提供技术支撑。
在水利建设中的河道、港口开发、水库库容复核等都要进行水下地形测量,随着社会对海洋的开发利用,海域测量同样越来越多。
在水下地形测量中对质量要求同样越来越高,这就需要在进行水下地形测量中使用新仪器、新技术,来减轻工作人员的劳动强度。
测量工作在防洪减灾中发挥重要作用,具有很大的社会效益和经济效益。
1.2 GPS-RTK技术简介GPS-RTK系统主要由基准站、流动站、数据通讯系统3部分组成。
GPS-RTK 是以载波相位观测量为依据的实时差分测量技术,它实时地获得测站点在特定坐标系中的三维坐标。
流动站是在获得固定解后接收基准站的数据,能够迅速及时的获得所需点的坐标,测量精度达到厘米级,能够满足设计和规划的精度要求。
这样就极大地扩展了作业距离,提高工作效率。
1.3 测深仪技术简介测深仪利用水声换能器发出超声波在均匀介质中直线传播,在遇到不同的介质反射的原理。
在测量时需将换能器发在水下一定位置,垂直向下发射声波并接收水底回波,根据声速和回波时间来确定被测点的水深,通过测得水深获得水下地形、地貌的基本情况,通常情况下水下地形测量采用与陆上统一基准面和坐标系。
1.4 RTK结合测深仪工作机制RTK结合测深仪作业模式就是既采用RTK实时采集的坐标、高程又采用测深仪测得的水深,即H=H0-(h+hi),式中,H为河底高程,H0为水面高程,h 为换能器吃水深,hi为换能器底部到河底的水深。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
差分GPS与RTK无验潮在水下地形测量中比较摘要:gps技术不断成熟和发展,如何在海洋测绘中充分利用gps 技术,使测绘事业更好、更快的发展是不断研究的问题。
本文首先介绍了差分gps,接着介绍了dgps、rtk定位技术的原理以及工作组成部分,然后介绍了rtk无验潮情况下的水下地形测量工作原理和方法,最后分析比较了rtk无验潮与dgps在测量水深中的优劣。
关键词:差分gps,rtk,水下地形测量,海洋测绘,潮汐改正,无验潮
1 前言
rtk定位技术是基于载波相位观测值的实时定位技术,能够实时提供测量点在指定坐标系中的三维定位结果,并能够达到厘米级精度,是gps应用的重大里程碑。
目前水深测量比较普遍的是使用dgps 定位技术,需要验潮水位对测深数据进行水位改正。
如果使用rtk 技术加数字测深仪,那么就使得水上测量可以采用rtk无验潮方式进行,既提高测量自动化程度,又可提高测量精度,而且可实现全天候测量。
本文通过比较两种不同的定位技术优劣,对不同条件下的水深测量,可选择不同设备进行测量提供参照。
2差分gps定位
差分gps定位是利用基准站和流动站两台gps接收机同时测量来自相同gps卫星的定位信号,用以联合确定用户的精确位置。
载波相位差分
载波相位差分技术简称rtk技术,是建立在实时处理两个测站的载波相位基础上的,它能以厘米级的精度实时提供测站的三维坐标。
对载波相位精度引入的误差只有lmm。
基准站传送的数据是伪距和相位的原始观测量。
用户接收到基准站和本机观测的数据后,利用静态相对测量处理方法对基线处理方法对基线进行求解,然后推算出测量点的坐标,在求解中最棘手的问题是如何求解相位整周模糊度。
求解相位整周模糊度方法很多,最常见的有:三差法,模糊度函数法,频率综合法,快速逼近法等。
这些方法用于rtk技术可分为两大类:有初始化方法和无初始化方法。
初始化后,保持卫星信号不失锁。
一旦信号失锁,需返回起算点重新捕获和锁定。
采用双频接收机将有效地克服这一缺陷。
3 rtk水下地形测量基本原理
3.1 rtk简介
rtk定位技术是基于载波相位观测值的实时动态定位技术,它能够实时地提供测站点在指定坐标系中的三维定位结果,并达到厘米级精度。
rtk技术的关键在于数据处理技术和数据传输技术,rtk 定位时要求基准站接收机实时地把观测数据(伪距观测值,相位观测值)及已知数据传输给流动站接收机,数据量比较大,一般都要求9600的波特率,这在无线电上不难实现。
3.2无验潮水下地形测量基本原理
当前gps实时动态相位差分(rtk)的定位精度普遍为:平面
10mm+1ppm,高程20mm+1ppm。
无验潮水下地形测量的基本原理是利用rtk测得的gps天线精确的三维坐标(x,y,h),其中x、y确定定位点的平面位置,rtk高程结合由测深仪同步测得的水深换算出同一平面位置的水下泥面的高程或水深值,从而获得水下地形数据,如图:
用户可以测得的数据:
h:gps天线到水面的高度
h:gps接收机测得的高程(水准高)
s:测深仪测得的水面到水底的深度
用户需要得到的最终数据:
b:水底到水准面的距离
即通常说的水深值
c:水准面到水底的距离
即通常说的水底高程
由图得出:c= (h – h) – s ;b= s – (h –h )
3.3 无验潮水下地形测量作业时应该注意的问题
3.3.1 有关岸台的问题
(1) 因为rtk技术的关键在于数据处理技术和数据传输技术,rtk定位时要求基准站接收机实时地把观测数据(伪距观测值,相位观测值)及已知数据传输给流动站接收机。
所以:
①选择地势较高、较开阔的控制点架设岸台,电台天线要尽量高
②电源电量要充足,否则也将影响到作业距离
③rtk作业应尽量避开雷雨天气,为减小电离层干扰应该尽量避开中午时间
④rtk作业前要进行严格的卫星预报,选择卫星分布好和数量多的时段进行测量
(2) rtk高程要保证精度,所以要精确量取天线高,并设入岸台中
(3) 岸台中输入根据已知点坐标转换出来的wgs-84坐标,输入已知点高程
3.3.2 有关流动站的问题
(1) 记录要限制为rtk固定解
(2) 精确量取天线高(天线至水面的高度),测深仪吃水改正参考同一水面线
(3) 差分天线最好使用高增益天线,天线姿态要尽量保持垂直,差分天线要尽可能的高
(4) rtk观测中,应确保流动站不受电磁干扰
3.3.3 有关绘图水位的问题
水位变化较大的区域,每公里约变化0.2m,,所以水深数据换算时分段处理,内插绘图水位数据,保证段与段之间的绘图水位差值小于0.1m,这样每个绘图水位控制的换算范围约为500m。
3.4 无验潮水下地形测量的优劣性
3.4.1 与传统的验潮法相比,无验潮水下地形测量具有如下优
势:
(1) 无须验潮数据,减少工作量
验潮法需要专门的人员测量水位或者到相关部门获取测量时段的水位数据。
无验潮法只需在采集水深的同时在同一台电脑上采集gps三维数据,这样起码可以减少一个读水尺的工作人员,还不须建一个或多个验潮站。
(2) 每个水位都同步、精确,提高精度
gps高程数据更新速度达10hz,每个水深点都对应精确的水位值,无须内插或外推整个区域的水位。
(3) 减少浪涌等引起的误差
验潮法测量中由于浪涌影响,探头上下起伏使得测得的水深有瞬时误差,在最终的数据中无法消除。
而无验潮法是通过gps天线高程来推算水下高程的,天线与探头的相对位置固定,无论船怎样上下波动都不会改变处理后的水下高程。
(4)数据处理方便、快捷
由于所有的数据都采集到一个文件中,并且存在计算机中,减少获取和编辑潮位数据的时间,即时能进行后处理,编辑水下地形图或断面图。
3.4.2 相对而言无验潮水下地形测量的缺点是
(1) 造价高
必须用rtk型接收机,这种接收机价格相对dgps高一些
(2)有效距离短
只能测量靠近基准站的区域,一般范围为半径20km,如果测量外海区域,将接收不到电台信号,便不能工作。
参考文献:
[1] 徐绍铨,张华海,杨志强,王泽民,gps卫星测量原理与应用。
武汉测绘科技大学出版社,1998.
[2] 吴子安,吴栋材. 水利工程测量. 测绘出版社. 1993.
[3] 刘基余,李征航,王跃虎等.全球定位系统原理及其应用.
测绘出版社.1993年.
[4] 郭秉义,李洪涛. 差分gps定位技术与应用. 北京电子工业出版社. 1996年.
[5] 徐绍锉,张海华等.gps测量原理及应用.武汉测绘科技大学出版社.1998年.
[6] 王志林等:《gps一rkt技术》,天津,《海洋测绘》1996(3).
[7] 赵建虎,张红梅.水下地形测量技术探讨,探讨与研究.
[8] 王真祥,胡国栋. gps rtk技术在无验潮水下地形测量中的应用初探,2001.
[9] 张发栋,虞祖培.gps无验潮测深技术在水深测量中的应用,港工技术。