西门子指令一览表
西门子PLC,STL语句指令大全

西门子PLC,STL语句指令大全指令(英文全称意思 ) :指令含义1、LD ( Load 装载 ) :动合触点2、LDN ( Load Not 不装载 ) : 动断触点3、A ( And 与动合) : 用于动合触点串联4、AN ( And Not 与动断 ) :用于动断触点串联5、O ( Or 或动合 ) :用于动合触点并联6、ON ( Or Not 或动断 ) : 用于动断触点并联7、= ( Out 输出 ) :用于线圈输出8、OLD ( Or Lode): 块或9、ALD ( And Lode): 块与10、LPS ( Logic Push ) :逻辑入栈11、LRD ( Logic Read ) :逻辑读栈12、LPP ( Logic Pop ) :逻辑出栈13、NOT ( not 并非 ) :非14、NOP ( No Operation Performed ) : 无操作15、AENO ( And ENO ) :指令盒输出端ENO相与16、S ( Set 放置 ) : 置117、R ( Reset 重置,清零 ) :清零18、P ( Positive) :上升沿19、N ( Negative) :下降沿20、TON ( On_Delay Timer ) :接通延时定时器21、TONR ( Retentive On_Delay Timer ) : 有记忆接通延时定时器22、TOF ( Off_ Delay Timer ) :断开延时定时器23、CTU ( Count Up ) : 增计数器24、CTD ( Count Down ) : 减计数器25、CTUD ( Count Up/ Count Down ) :增减计数器26、ADD ( add 加 ) : 加注意//ADD_I (_ I 表示整数)ADD_DI( DI表示双字节整数)ADD-R (R 表示实数)它们都是加运算只是数的大小不同。
找全了,西门子数控系统(加工中心)指令对照表

找全了,西门子数控系统(加工中心)指令对照表中文含义西门子快速定位G00 X_ Y_ Z_直线插补G01 X_ Y_ Z_ F_圆弧插补半径编程G02/G03 X_ Y_ CR=_ F_圆弧插补圆心编程G02/G03 X_ Y_I_ J_ F_进给暂停G04 F (秒)G04 S(转速) (S为转速,只有主轴受控机床才可是使用)工作平面G17* X-Y G18 Z-X G19 Y-Z绝对/相对G90*绝对G91相对进给G94*分进给/G95转进给输入单位G71*公制/G70英制刀具半径补偿G41左刀补 G42右刀补 G40取消刀补G41/G42 G90/G91 G01 X_ Y_ D_ F_ (建立) G40 G90/G91 G01 X_ Y_ F_ (取消)刀具长度补偿T_D_ + G5_例如G00 Z_ T_D_;坐标偏移TRANS X_ Y_ Z_ (绝对)ATRANS X_ Y_ Z_ (附加于前一个指令) TRANS 单独占一行,取消坐标偏移坐标旋转ROT RPL= __ (RPL后跟旋转度数)AROT RPL=__(附加前一个指令)ROT单独占一行,取消坐标旋转比例缩放SCALE X_Y_ (比1大放大,比1小缩小) ASCALE X_Y_(附加前一个指令)SCALE单独占一行,取消比例缩放镜像MIRROR X0 Y0 (关于X轴对称写Y0,反之亦然,X、Y后面只要跟一个数字即可,没意义)AMIRROR X0 Y0 (附加前一个指令)MIRROR 单独占一行,取消镜像极坐标AP极角 RP极径孔循环CYCLE 81、82、83、84、HOLSE等宏指令变量符号为R1-R249,R0为空变量运算(+、-、*、/、COS、SIN、TAN、SQRT)=、>、>=、、<>、><>等于、大于、大于等于、小于、小于等于、不等于)IF R1>=42.1 GOTOB AAA运算公式要加小括号“()”,比如COS(45)R1=6AAA: G01 X=R1 Y0;运算顺序:先三角函数,后乘除,再加减;先括号里面,后括号外面。
西门子编程语句表
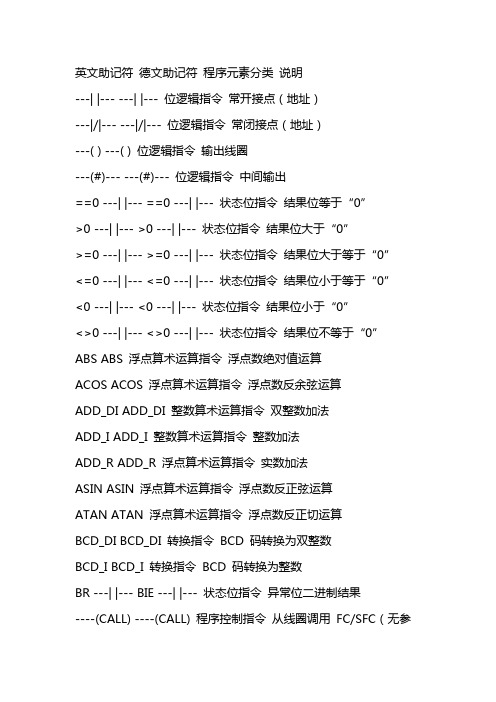
英文助记符德文助记符程序元素分类说明---| |--- ---| |--- 位逻辑指令常开接点(地址)---|/|--- ---|/|--- 位逻辑指令常闭接点(地址)---( ) ---( ) 位逻辑指令输出线圈---(#)--- ---(#)--- 位逻辑指令中间输出==0 ---| |--- ==0 ---| |--- 状态位指令结果位等于“0”>0 ---| |--- >0 ---| |--- 状态位指令结果位大于“0”>=0 ---| |--- >=0 ---| |--- 状态位指令结果位大于等于“0”<=0 ---| |--- <=0 ---| |--- 状态位指令结果位小于等于“0”<0 ---| |--- <0 ---| |--- 状态位指令结果位小于“0”<>0 ---| |--- <>0 ---| |--- 状态位指令结果位不等于“0”ABS ABS 浮点算术运算指令浮点数绝对值运算ACOS ACOS 浮点算术运算指令浮点数反余弦运算ADD_DI ADD_DI 整数算术运算指令双整数加法ADD_I ADD_I 整数算术运算指令整数加法ADD_R ADD_R 浮点算术运算指令实数加法ASIN ASIN 浮点算术运算指令浮点数反正弦运算ATAN ATAN 浮点算术运算指令浮点数反正切运算BCD_DI BCD_DI 转换指令BCD 码转换为双整数BCD_I BCD_I 转换指令BCD 码转换为整数BR ---| |--- BIE ---| |--- 状态位指令异常位二进制结果----(CALL) ----(CALL) 程序控制指令从线圈调用FC/SFC(无参数)CALL_FB CALL_FB 程序控制指令从方块调用FBCALL_FC CALL_FC 程序控制指令从方块调用FCCALL_SFB CALL_SFB 程序控制指令从方块调用SFBCALL_SFC CALL_SFC 程序控制指令从方块调用SFC----(CD) ----(ZR) 计数器指令减计数器线圈CEIL CEIL 转换指令上取整CMP >=D CMP >=D 比较指令双整数比较(==,<>,>,<,>=,<=)CMP >=I CMP >=I 比较指令整数比较(==,<>,>,<,>=,<=)CMP >=R CMP >=R 比较指令实数比较(==,<>,>,<,>=,<=)COS COS 浮点算术运算指令浮点数余弦运算----(CU) ---( ZV ) 计数器指令加计数器线圈DI_BCD DI_BCD 转换指令双整数转换为BCD 码DI_R DI_R 转换指令双整数转换为浮点数DIV_DI DIV_DI 整数算术运算指令双整数除法所有梯形逻辑指令一览A-2英文助记符德文助记符程序元素分类说明DIV_I DIV_I 整数算术运算指令整数除法DIV_R DIV_R 浮点算术运算指令实数除法EXP EXP 浮点算术运算指令浮点数指数运算FLOOR FLOOR 转换指令下取整I_BCD I_BCD 转换指令整数转换为BCD 码I_DI I_DI 转换指令整数转换为双整数INV_I INV_I 转换指令整数的二进制反码INV_DI INV_DI 转换指令双整数的二进制反码---( JMP ) ---( JMP ) 跳转指令无条件跳转---( JMP ) ---( JMP ) 跳转指令条件跳转---( JMPN ) ---( JMPN ) 跳转指令若非则跳转LABEL LABEL 跳转指令标号LN LN 浮点算术运算指令浮点数自然对数运算---(MCR>) ---(MCR>) 程序控制指令主控继电器断开---(MCR<) ---(MCR<) 程序控制指令主控继电器接通---(MCRA) ---(MCRA) 程序控制指令主控继电器启动---(MCRD) ---(MCRD) 程序控制指令主控继电器停止MOD_DI MOD_DI 整数算术运算指令回送余数的双整数MOVE MOVE 赋值指令赋值MUL_DI MUL_DI 整数算术运算指令双整数乘法MUL_I MUL_I 整数算术运算指令整数乘法MUL_R MUL_R 浮点算术运算指令实数乘法---(N)--- ---(N)--- 位逻辑指令RLO 下降沿检测NEG NEG 位逻辑指令地址下降沿检测NEG_DI NEG_DI 转换指令双整数的二进制补码NEG_I NEG_I 转换指令整数的二进制补码NEG_R NEG_R 转换指令浮点数求反---|NOT|--- ---|NOT|--- 位逻辑指令信号流反向---(OPN) ---(OPN) 数据块调用指令打开数据块:DB 或DI OS ---| |--- OS ---| |--- 状态位指令存储溢出异常位OV ---| |--- OV ---| |--- 状态位指令溢出异常位---( P )--- ---( P )--- 位逻辑指令RLO 上升沿检测POS POS 位逻辑指令地址上升沿检测---( R ) ---( R ) 位逻辑指令线圈复位---( RET ) ---( RET ) 程序控制指令返回ROL_DW ROL_DW 移位和循环指令双字左循环ROL_DW ROL_DW 移位和循环指令双字右循环ROUND ROUND 转换指令舍入为双整数RS RS 位逻辑指令复位置位触发器---( S ) ---( S ) 位逻辑指令线圈置位---(SAVE) ---(SAVE) 位逻辑指令将RLO 存入BR 存储器---( SC ) ---( SZ ) 计数器指令设置计数器值S_CD Z_RUECK 计数器指令减计数器S_CU Z_VORW 计数器指令加计数器所有梯形逻辑指令一览A-3英文助记符德文助记符程序元素分类说明S_CUD ZAEHLER 计数器指令加-减计数器---( SD ) ---( SE ) 定时器指令接通延时定时器线圈---( SE ) ---( SV ) 定时器指令扩展脉冲定时器线圈---( SF ) ---( SA ) 定时器指令断开延时定时器线圈SHL_DW SHL_DW 移位和循环指令双字左移SHL_W SHL_W 移位和循环指令字左移SHR_DI SHR_DI 移位和循环指令双整数右移SHR_DW SHR_DW 移位和循环指令双字右移SHR_I SHR_I 移位和循环指令整数右移SHR_W SHR_W 移位和循环指令字右移SIN SIN 浮点算术运算指令浮点数正弦运算S_ODT S_EVERZ 定时器指令接通延时S5 定时器S_ODTS S_SEVERZ 定时器指令保持型接通延时S5 定时器S_OFFDT S_AVERZ 定时器指令断电延时S5 定时器---( SP ) ---( SI ) 定时器指令脉冲定时器线圈S_PEXT S_VIMP 定时器指令扩展脉冲S5 定时器S_PULSE S_IMPULS 定时器指令脉冲S5 定时器SQR SQR 浮点算术运算指令浮点数平方SQRT SQRT 浮点算术运算指令浮点数平方根SR SR 位逻辑指令置位复位触发器---( SS ) ---( SS ) 定时器指令保持型接通延时定时器线圈SUB_DI SUB_DI 整数算术运算指令双整数减法SUB_I SUB_I 整数算术运算指令整数减法SUB_R SUB_R 浮点算术运算指令实数减法TAN TAN 浮点算术运算指令浮点数正切运算TRUNC TRUNC 转换指令舍去小数取整为双整数UO ---| |--- UO ---| |--- 状态位指令无序异常位WAND_DW WAND_DW 字逻辑指令双字和双字相“与”WAND_W WAND_W 字逻辑指令字和字相“与”WOR_DW WOR_DW 字逻辑指令双字和双字相“或”WOR_W WOR_W 字逻辑指令字和字相“或”WXOR_DW WXOR_DW 字逻辑指令双字和双字相“异或”WXOR_W WXOR_W 字逻辑指令字和字相“异或”__。
(完整版)数控系统中西门子和发那科(加工中心)指令对照表
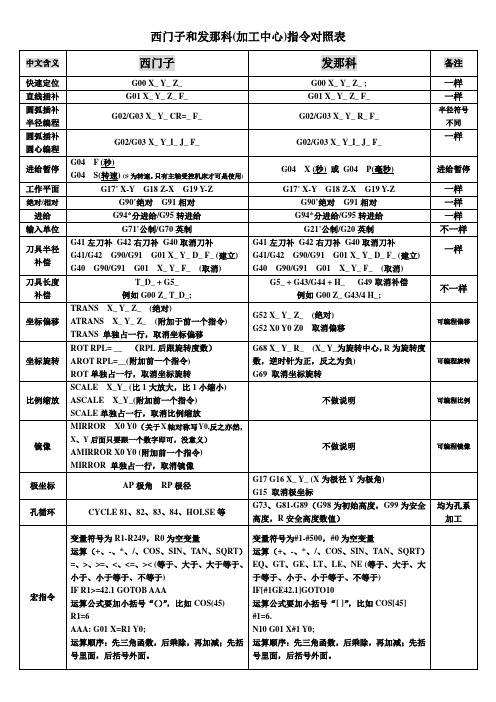
不一样
坐标偏移
TRANSX_ Y_ Z_ (绝对)
ATRANSX_ Y_ Z_ (附加于前一个指令)
TRANS单独占一行,取消坐标偏移
G52 X_ Y_ Z_(绝对)
G52 X0 Y0 Z0取消偏移
可编程偏移
坐标旋转
ROT RPL=__(RPL后跟旋转度数)
AROT RPL=__(附加前一个指令)
AMIRRORX0Y0 (附加前一个指令)
MIRROR单独占一行,取消镜像
不做说明
可编程镜像
极坐标
AP极角RP极径
G17 G16 X_ Y_(X为极径Y为极角)
G15取消极坐标
孔循环
CYCLE 81、82、83、84、HOLSE等
G73、G81-G89(G98为初始高度,G99为安全高度,R安全高度数值)
ROT单独占一行,取消坐标旋转
G68X_ Y_ R_ (X_ Y_为旋转中心,R为旋转度数,逆时针为正,反之为负)
G69取消坐标旋转
可编程旋转
比例缩放
SCALEX_Y_(比1大放大,比1小缩小)
ASCALE X_Y_(附加前一个指令)
SCALE单独占一行,取消比例缩放
不做说明
可编程比例
镜像
MIRROR X0 Y0(关于X轴对称写Y0,反之亦然,X、Y后面只要跟一个数字即可,没意义)
G90 G02/G03 X_ Y_ I_ J_ F_ (圆心绝对值)
G91 G02/G03 X_Y_ I_ J_ F_ (圆心相对值)
G02/G03 X_ Z_ I_ K_ F_ (圆心绝对值)
G02/G03 U_W_ I_ K_ F_
西门子S7 指令表
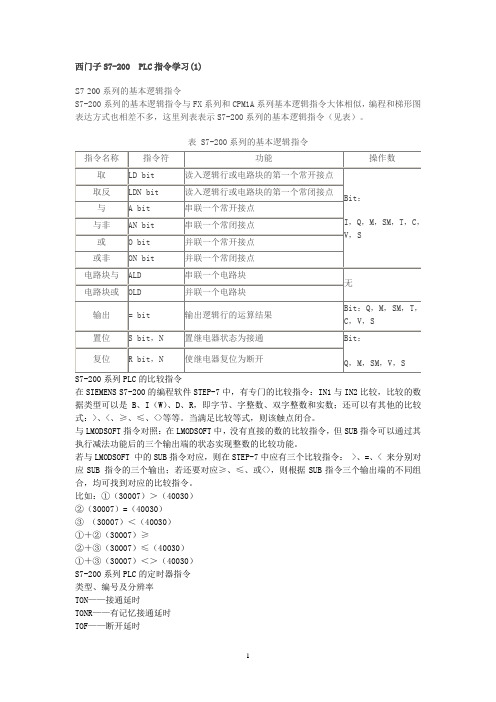
西门子S7-200 PLC指令学习(1)S7-200系列的基本逻辑指令S7-200系列的基本逻辑指令与FX系列和CPM1A系列基本逻辑指令大体相似,编程和梯形图表达方式也相差不多,这里列表表示S7-200系列的基本逻辑指令(见表)。
表 S7-200系列的基本逻辑指令S7-200系列PLC的比较指令在SIEMENS S7-200的编程软件STEP-7中,有专门的比较指令:IN1与IN2比较,比较的数据类型可以是B、I(W)、D、R,即字节、字整数、双字整数和实数;还可以有其他的比较式:>、<、≥、≤、<>等等。
当满足比较等式,则该触点闭合。
与LMODSOFT指令对照:在LMODSOFT中,没有直接的数的比较指令,但SUB指令可以通过其执行减法功能后的三个输出端的状态实现整数的比较功能。
若与LMODSOFT 中的SUB指令对应,则在STEP-7中应有三个比较指令: >、=、< 来分别对应SUB 指令的三个输出;若还要对应≥、≤、或<>,则根据SUB指令三个输出端的不同组合,均可找到对应的比较指令。
比如:①(30007)>(40030)②(30007)=(40030)③(30007)<(40030)①+②(30007)≥②+③(30007)≤(40030)①+③(30007)<>(40030)S7-200系列PLC的定时器指令类型、编号及分辨率TON——接通延时TONR——有记忆接通延时TOF——断开延时3种分辨率(时基):1ms、10ms、100ms——分别对应不同的定时器号定时器6个要素:指令格式(时基、编号等)预置值——PT使能——IN 复位——3种定时器不同当前值——Txxx 定时器状态(位)——可由触点显示定时值=时基×预置值PT。
由于定时器的计时间隔与程序的扫描周期并不同步,定时器可能在其时基(1ms、10ms、100ms)内任何时间启动,所以,未避免计时时间丢失,一般要求设置PT预置值必须大于最小需要的时间间隔。
西门子常用指令

MOVR IN,OUT
IN,OUT:VD,ID,QD,MD,SD,SMD,LD,AC,*VD,*AC,*LD
IN还可以是常数
BIR IN,OUT
立即读取输入IN的值,将结果输出到OUT
IN:IB
OUT:VB,IB,QB,MB,SB,SMB,LB,AC,*VD,*AC,*LD
DATA,S_BIT:I,Q,M,SM,T,C,V,S,L
N:VB,IB,QB,MB,SB,SMB,LB,AC,*VD,*AC,*LD,常数
S7-200PLC交换和填充指令
交换和填充指令如表4-24所示。
表4-24交换和填充指令
名称
指令格式
(语句表)
功能
操作数
换字节指令
SWAP IN
将输入字IN的高位字节与低位字节的内容交换,结果放回IN中
IN:VW,IW,QW,MW,SW,SMW,LW,T,C,AC,*VD,*AC,*LD
填充指令
FILL IN,OUT,N
用输入字IN填充从OUT开始的N个字存储单元
N的范围为1~255
IN,OUT:VW,IW,QW,MW,SW,SMW,LW,T,C,AC,*VD,*AC,*LD
IN还可以是AIW和常数
FND<> TBL,PTN,INDEX
FND< TBL,PTN,INDEX
FND> TBL,PTN,INDEX
搜索表TBL,从INDEX指定的数据项开始,用给定值PTN检索出符合条件(=,<>,<,>)的数据项
如果找到一个符合条件的数据项,则INDEX指明该数据项在表中的位置。如果一个也找不到,则INDEX的值等于数据表的长度。为了搜索下一个符合的值,在再次使用该指令之前,必须先将INDEX加1
SIEMENS编程G代码指令一览表
在G258和G259时的旋转角
I
插补参数
SF
G33中螺纹加工切入点
J
插补参数
SPOS
主轴定位
K
插补参数
STOPRE
停止解码
Y
坐标轴
G500
取消可设定零点偏置(模态有效)
Z
坐标轴
G54
第一可设定零点偏置
AR
圆弧插补张角
G55
第二可设定零点偏置
CHF
倒角
G56
第三可设定零点偏置
CR
圆弧插补半径
G57
第四可设定零点偏置
GOTOB
向后跳转指令
G53
取消可设定零点偏置(段方式有效)
GOTOF
向前跳转指令
G60
准确定位
IF
跳转条件
M40
自动变换齿轮级
G332
不带补偿夹具切削内螺纹退刀
M41-M45
齿轮级1到齿轮级5
G4
暂停时间
N
副程序段
G63
带补偿夹具切削内螺纹
:
主程序段
G74
回参考点
P
子程序调用次数
G75
回固定点
R0-R249
计算参数
G158
可编程的偏置
SIN( )
正弦
G258
可编程的旋转
COS( )
余弦
G259
附加可编程旋转
G91
增量尺寸
LCYC84
不带补偿夹具切削内螺纹
G94
直线进给率F(单位毫米/分)
LCYC85
镗孔_1
G95
旋转进给率F(单位毫米/转)
LCYC60
PLC培训-西门子PLC指令大全
金蓝PLC培训,西门子PLC指令大全金蓝PLC培训,西门子PLC指令大全。
自动化编程学习起来很困难,很多人对于学习plc 编程头疼不已,下面是山东金蓝plc培训机构为大家整理的经常用到的金蓝PLC培训,西门子PLC指令大全。
1、位逻辑指令1.1 -||- 常开接点(地址)1.2 -|/|- 常闭接点(地址)1.3 XOR 位异或1.4 -|NOT|- 信号流反向1.5 -( ) 输出线圈1.6 -(#)- 中间输出1.7 -(R) 线圈复位1.8 -(S) 线圈置位1.9 RS 复位置位触发器1.10 RS 置位复位触发器1.11 -(N)- RLO下降沿检测1.12 -(P)- PLO上升沿检测1.13 -(SAVE) 将RLO存入BR存储器1.14 MEG 地址下降沿检测1.15 POS 地址上升沿检测2、比较指令2.1 CMP?I 整数比较2.2 CMP?D 双整数比较2.3 CMP?R 实数比较3、转换指令3.1 BCD_IBCD码转换为整数3.2 I_BCD 整数转换为BCD码3.3 I_DINT 整数转换为双整数3.4 BCD_DIBCD码转换为双整数3.5 DI_BCD 双整数转换为BCD码 3.6 DI_REAL 双整数转换为浮点数 3.7 INV_I 整数的二进制反码3.8 INV_DI 双整数的二进制反码3.9 NEG_I 整数的二进制补码3.10 NEG_DI 双整数的二进制补码 3.11 NEG_R 浮点数求反3.12 ROUND 舍入为双整数3.13 TRUNC 舍去小数取整为双整数 3.14 CEIL 上取整3.15 FLOOR 下取整4、计数器指令4.1 S_CUD 加减计数4.2 S_CU 加计数器4.3 S_CD 减计数器4.4 -(SC) 计数器置初值4.5 -(CU) 加计数器线圈4.6 -(CD) 减计数器线圈5、数据块指令5.1 -(OPN) 打开数据块:DB或DI6、逻辑控制指令6.1 -(JMP) 无条件跳转6.2 -(JMP) 条件跳转6.3 -(JMPN) 若非则跳转6.4 LABEL 标号7、整数算术运算指令7.1 ADD_I 整数加法7.2 SUB_I 整数减法7.3 MUL_I 整数乘法7.4 DIV_I 整数除法7.5 ADD_DI 双整数加法7.6 SUB_DI 双整数减法7.7 MUL_DI 双整数乘法7.8 DIV_DI 双整数除法7.9 MOD_DI 回送余数的双整数8、浮点算术运算指令8.1 基础指令8.1.1 ADD_R 实数加法8.1.2 SUB_R 实数减法8.1.3 MUL_R 实数乘法8.1.4 DIV_R 实数除法8.1.5 ABS 浮点数绝对值运算8.2 扩展指令8.2.1 SQR 浮点数平方8.2.2 SQRT 浮点数平方根8.2.3 EXP 浮点数指数运算8.2.4 LN 浮点数自然对数运算 8.2.5 SIN 浮点数正弦运算8.4.6 COS 浮点数余弦运算8.2.7 TAN 浮点数正切运算8.2.8 ASIN 浮点数反正弦运算8.2.9 ACOS 浮点数反余弦运算8.2.10ATAN 浮点数反正切运算9、赋值指令9.1 MOVE 赋值10、程序控制指令10.1 -(Call) 从线圈调用FC/SFC(无参数)10.2 CALL_FB 从方块调用FB 10.3 CALL_FC 从方块调用FC 10.4 CALL_SFB 从方块调用SFB 10.5 CALL_SFC 从方块调用SFC 10.6 -(MCR<> 主控继电器接通 10.7 -(MCR>) 主控继电器断开 10.8 -(MCRA) 主控继电器启动 10.9 -(MCRD) 主控继电器停止 10.10 -(RET) 返回11、移位和循环指令11.1 移位指令11.1.1 SHR_I 整数右移11.1.2 SHR_DI 双整数右移11.1.3 SHL_W 字左移11.1.4 SHR_W 字右移11.1.5 SHL_DW 双字左移11.1.6 SHR_DW 双字右移11.2 循环指令11.2.1 ROL_DW 双字左循环11.2.2 ROR_DW 双字右循环12、状态位指令12.1 OV -||- 溢出异常位12.2 OS -||- 存储溢出异常位12.3 UO -||- 无序异常位12.4 BR -||- 异常位二进制结果12.5 ==0-||- 结果位等于'0' 12.6 <>0-||- 结果位不等于'0' 12.7 >0-||- 结果位大于'0' 12.8 <> 结果位小于'0'12.9 >=0-||- 结果位大于等于'0'12.10 <=0-||->13、定时器指令13.1 S_PULSE 脉冲S5定时器13.2 S_PEXT 扩展脉冲S5定时器13.3 S_ODT 接通延时S5定时器13.4 S_ODTS 保持型接通延时S5定时器13.5 S_OFFDT 断电延时S5定时器13.6 -(SP) 脉冲定时器线圈13.7 -(SE) 扩展脉冲定时器线圈13.8 -(SD) 接通延时定时器线圈13.9 -(SS) 保持型接通延时定时器线圈13.10 -(SF) 断开延时定时器线圈14、字逻辑指令14.1 WAND_W 字和字相'与'14.2 WOR_W 字和字相'或'14.3 WAND_DW 双字和双字相'与'14.4 WOR_DW 双字和双字相'或'14.5 WXOR_W 字和字相'异或'14.6 WXOR_DW 双字和双字相'异或“泰安市泰山区金蓝职业培训学校自2006年被泰安市劳动部门批准成立以来,坚持“办精品教育,铸金色蓝领”,秉承“厚道办学”的理念。
(完整版)数控系统中西门子和发那科(加工中心)指令对照表
圆弧咼级 指令
G01 X_ Y_ F_到达圆弧起点
CIPXY11=J1= F中间点插补圆弧,(XY
为圆弧终点坐标,I1、J1为起点到终点之间的 任意点的坐标)
圆弧指令 张角终点
G01 X_ Y_ F_到达圆弧起点
G02/G03 AR=_ X_ Y_ F_
数,逆时针为正,反之为负)
G69取消坐标旋转
可编程旋转
比例缩放
SCALE X_Y_(比1大放大,比1小缩小)
ASCALE X_Y_(附加前一个指令)
SCALE单独占一行,取消比例缩放
不做说明
可编程比例
镜像
MIRRORX0 Y0(关于X轴对称写Y0,反之亦然,
X、Y后面只要跟一个数字即可,没意义)
AMIRROR X0 Y0(附加前一个指令)
G02/G03 U_ W_ R_ F_
G91 G02/G03 X_ Y_ R_ F_
(半径相对值)
(半径相对值)
(半径相对值)
(半径相对值)
G90 G02/G03 X_ Z_ I_K_ F_
G90 G02/G03 X Y I J F
G02/G03 X_ Z_ I_ K_ F_
G90 G02/G03 X Y I J F
G01 X_ Z_ F_
G01 X_ Y_ Z_ F_
绝对相对
G90绝对/G91相对
G90绝对/G91相对
X、Z绝对/U、W相对
G90绝对/G91相对
公制英制
G71*公制/G70英制
G71*公制/G70英制
G21*公制/G20英制
G21*公制/G20英制
西门子PLC基本指令表及各指令解释
西门⼦PLC基本指令表及各指令解释最受欢迎的⼯控微信平台:技术分享、学习交流、⼯控视频西门⼦PLC基本指令表如下图所⽰名称助记符⽬标元件说明取指令LD I、Q、M、SM、T、C、V、S、L常开接点逻辑运算起始取反指令LDN I、Q、M、SM、T、C、V、S、L常闭接点逻辑运算起始线圈驱动指令=Q、M、SM、T、C、V、S、L驱动线圈的输出与指令A I、Q、M、SM、T、C、V、S、L单个常开接点的串联与⾮指令AN I、Q、M、SM、T、C、V、S、L单个常闭接点的串联或指令O I、Q、M、SM、T、C、V、S、L单个常开接点的并联或⾮指令ON I、Q、M、SM、T、C、V、S、L单个常闭接点的并联置位指令S I、Q、M、SM、T、C、V、S、L使动作保持复位指令R I、Q、M、SM、T、C、V、S、L使保持复位正跳变ED I、Q、M、SM、T、C、V、S、L输⼊信号上升沿产⽣脉冲输出负跳变EU I、Q、M、SM、T、C、V、S、L输⼊信号下降沿产⽣脉冲输出空操作指令NOP⽆使步序作空操作⼀、标准触点LD、A、O、LDN、AN、ONLD,取指令。
表⽰⼀个与输⼊母线相连的常开接点指令,即常开接点逻辑运算起始。
LDN,取反指令。
表⽰⼀个与输⼊母线相连的常闭接点指令,即常闭接点逻辑运算起始。
A,与指令。
⽤于单个常开接点的串联。
AN,与⾮指令。
⽤于单个常闭接点的串联。
O,或指令。
⽤于单个常开接点的并联。
ON,或⾮指令。
⽤于单个常闭接点的并联。
⼆、正、负跳变ED、EUED,在检测到⼀个正跳变(从OFF到ON)之后,让能流接通⼀个扫描周期。
EU,在检测到⼀个负跳变(从ON到OFF)之后,让能流接通⼀个扫描周期。
三、输出==,在执⾏输出指令时,映像寄存器中的指定参数位被接通。
四、置位与复位指令S、RS,执⾏置位(置1)指令时,从bit或OUT指定的地址参数开始的N个点都被置位。
R,执⾏复位(置0)指令时,从bit或OUT指定的地址参数开始的N个点都被复位。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1 位逻辑指令
1.1 -||- 常开接点(地址)
1.2 -|/|- 常闭接点(地址)
1.3 XOR 位异或
1.4 -|NOT|- 信号流反向
1.5 -( ) 输出线圈
1.6 -(#)- 中间输出
1.7 -(R) 线圈复位
1.8 -(S) 线圈置位
1.9 RS 复位置位触发器
1.10 RS 置位复位触发器
1.11 -(N)- RLO下降沿检测
1.12 -(P)- PLO上升沿检测
1.13 -(SAVE) 将RLO存入BR存储器1.14 MEG 地址下降沿检测
1.15 POS 地址上升沿检测
2 比较指令
2.1 CMP?I 整数比较
2.2 CMP?D 双整数比较
2.3 CMP?R 实数比较
3 转换指令
3.1 BCD_IBCD码转换为整数
3.2 I_BCD 整数转换为BCD码
3.3 I_DINT 整数转换为双整数
3.4 BCD_DIBCD码转换为双整数
3.5 DI_BCD 双整数转换为BCD码3.6 DI_REAL 双整数转换为浮点数3.7 INV_I 整数的二进制反码
3.8 INV_DI 双整数的二进制反码3.9 NEG_I 整数的二进制补码
3.10 NEG_DI 双整数的二进制补码3.11 NEG_R 浮点数求反
3.12 ROUND 舍入为双整数
3.13 TRUNC 舍去小数取整为双整数3.14 CEIL 上取整
3.15 FLOOR 下取整
4 计数器指令
4.1 S_CUD 加减计数
4.2 S_CU 加计数器
4.3 S_CD 减计数器
4.4 -(SC) 计数器置初值
4.5 -(CU) 加计数器线圈
4.6 -(CD) 减计数器线圈
5 数据块指令
5.1 -(OPN) 打开数据块:DB或DI
6 逻辑控制指令
6.1 -(JMP) 无条件跳转
6.2 -(JMP) 条件跳转
6.3 -(JMPN) 若非则跳转
6.4 LABEL 标号
7 整数算术运算指令
7.1 ADD_I 整数加法
7.2 SUB_I 整数减法
7.3 MUL_I 整数乘法
7.4 DIV_I 整数除法
7.5 ADD_DI 双整数加法
7.6 SUB_DI 双整数减法
7.7 MUL_DI 双整数乘法
7.8 DIV_DI 双整数除法
7.9 MOD_DI 回送余数的双整数
8 浮点算术运算指令
8.1 基础指令
8.1.1 ADD_R 实数加法
8.1.2 SUB_R 实数减法
8.1.3 MUL_R 实数乘法
8.1.4 DIV_R 实数除法
8.1.5 ABS 浮点数绝对值运算
8.2 扩展指令
8.2.1 SQR 浮点数平方
8.2.2 SQRT 浮点数平方根
8.2.3 EXP 浮点数指数运算
8.2.4 LN 浮点数自然对数运算
8.2.5 SIN 浮点数正弦运算
8.4.6 COS 浮点数余弦运算
8.2.7 TAN 浮点数正切运算
8.2.8 ASIN 浮点数反正弦运算
8.2.9 ACOS 浮点数反余弦运算
8.2.10ATAN 浮点数反正切运算
9 赋值指令
9.1 MOVE 赋值
10 程序控制指令
10.1 -(Call) 从线圈调用FC/SFC(无参数) 10.2 CALL_FB 从方块调用FB
10.3 CALL_FC 从方块调用FC
10.4 CALL_SFB 从方块调用SFB
10.5 CALL_SFC 从方块调用SFC
10.6 -(MCR<) 主控继电器接通
10.7 -(MCR>) 主控继电器断开
10.8 -(MCRA) 主控继电器启动
10.9 -(MCRD) 主控继电器停止
10.10 -(RET) 返回
11 移位和循环指令
11.1 移位指令
11.1.1 SHR_I 整数右移
11.1.2 SHR_DI 双整数右移
11.1.3 SHL_W 字左移
11.1.4 SHR_W 字右移
11.1.5 SHL_DW 双字左移
11.1.6 SHR_DW 双字右移
11.2 循环指令
11.2.1 ROL_DW 双字左循环
11.2.2 ROR_DW 双字右循环
12 状态位指令
12.1 OV -||- 溢出异常位
12.2 OS -||- 存储溢出异常位
12.3 UO -||- 无序异常位
12.4 BR -||- 异常位二进制结果
12.5 ==0-||- 结果位等于"0"
12.6 <>0-||- 结果位不等于"0"
12.7 >0-||- 结果位大于"0"
12.8 <0-||- 结果位小于"0"
12.9 >=0-||- 结果位大于等于"0"
12.10 <=0-||- 结果位小于等于"0"
13 定时器指令
13.1 S_PULSE 脉冲S5定时器
13.2 S_PEXT 扩展脉冲S5定时器
13.3 S_ODT 接通延时S5定时器
13.4 S_ODTS 保持型接通延时S5定时器13.5 S_OFFDT 断电延时S5定时器
13.6 -(SP) 脉冲定时器线圈
13.7 -(SE) 扩展脉冲定时器线圈
13.8 -(SD) 接通延时定时器线圈
13.9 -(SS) 保持型接通延时定时器线圈
13.10 -(SF) 断开延时定时器线圈
14 字逻辑指令
14.1 WAND_W 字和字相"与"
14.2 WOR_W 字和字相"或"
14.3 WAND_DW 双字和双字相"与"
14.4 WOR_DW 双字和双字相"或"
14.5 WXOR_W 字和字相"异或"
14.6 WXOR_DW 双字和双字相"异或
欢迎您的下载,
资料仅供参考!
致力为企业和个人提供合同协议,策划案计划书,学习资料等等
打造全网一站式需求。