车辆动力学(5)- 行星齿轮传动建模分解
行星齿轮的三维建模与运动仿真
北京工业大学耿丹学院毕业设计(论文)基于Solidwork的行星齿轮的三维建模与运动仿真所在学院专业班级姓名学号指导老师年月日摘要行星齿轮减速器是一种至少有一个齿轮的几何轴线绕着固定位置转动圆周运动的传动,变速器通常和若干行星轮和传递载荷的作用,为了使功率分流。
渐开线行星齿轮传动具有以下优点:传动比大,结构紧凑,体积小、质量小,效率高,噪音低,运转平稳,因此被广泛应用于冶金,工程机械,起重,运输,航空,机床,电气机械及国防工业等部门,作为减速、变速或增速的齿轮传动装置NGW型行星齿轮传动机构的传动原理:当高速轴由电机驱动,带动太阳轮,然后带动行星轮转动,内齿圈固定,然后带动行星架输出运动的,在行星架上的行星轮既自转和公转,具有相同的结构。
二级,三级或多级传输。
NGW型行星齿轮传动机构主要由太阳齿轮,行星齿轮,内齿圈,行星架,命名为基本成分后,也被称为zk-h型行星齿轮传动机构。
本设计是基于行星齿轮结构设计的特点,和SolidWorks三维建模和运动仿真。
行星齿轮和各种类型的特性的比较,确定方案;其次根据输入功率,相应的输出转速,传动比的传动设计、总体结构设计;三维建模并最终完成了SolidWorks,和模型的装配,并完成了传动部分的运动仿真和运动分析。
关键词:行星齿轮减速器、运动仿真、装配、三维建模AbstractPlanetary gear reducer is driving a at least one gear geometric axis rotated around a circular motion of fixed position, the transmission is usually and planetary gear and transfer load, in order to make the power split. Involute planetary gear transmission has the following advantages: large transmission ratio, compact structure, small volume, small mass, high efficiency, low noise, smooth operation, so it is widely used in metallurgy, engineering machinery, lifting, transportation, aviation, machine tools, electrical machinery and defense industry and other departments, as gear reducer, gear or the growthThe transmission principle of NGW type planetary gear transmission mechanism: when the high-speed shaft driven by a motor, to drive the sun gear, and the planet wheel is driven to rotate, the inner gear ring is fixed, and then drives the planetary frame outputting motion, on the planet carrier planet wheel both rotation and revolution, has the same structure. The two level, three level or multilevel transmission. The NGW type planetary gear transmission mechanism mainly consists of a sun gear, planet gear, inner gear ring, a planetary frame, named after the basic components, also known as the ZK-H type planetary gear transmission mechanism.This design is the design of planetary gear structure based on SolidWorks, and 3D modeling and motion simulation. Comparison of characteristics of planetary gears, and various types of determination scheme; secondly according to the input power, the output speed of the overall design, transmission design, ratio; 3D modeling and finished SolidWorks, assembly and model, and the motion simulation and motion analysis of the transmission part.Keywords: planetary gear reducer, assembly, motion simulation, 3D modeling目录摘要 (1)Abstract (3)第1章绪论 (6)1.1 国内外的研究状况及其发展方向 (6)1.2 SOLIDWORKS行星齿轮的选题分析及设计内容 (7)1.3 主要的工作内容 (7)第2章 NGW型行星轮减速器方案确定 (9)2.1 机构简图的确定 (9)2.2 周转轮系部分的选择 (9)2.3 NGW型行星轮减速器方案确定 (9)2.4 行星轮系中各轮齿数的确定 (12)第3章 NGW型行星减速器结构设计 (14)3.1 基本参数要求与选择 (14)3.1.1 基本参数要求 (14)3.1.2 电动机的选择 (14)3.2 方案设计 (14)3.2.1 机构简图 (14)3.2.2 齿形及精度 (15)3.2.3 齿轮材料及性能 (15)3.3 齿轮的计算与校核 (16)3.3.1 配齿数 (16)3.3.2 初步计算齿轮主要参数 (16)3.3.3 按弯强度曲初算模数m (19)3.3.4 齿轮疲劳强度校核 (20)3.4 轴上部件的设计计算与校核 (26)3.4.1 轴的计算 (26)3.4.2 行星架设计 (31)3.5 键的选择与校核 (35)3.5.1 键的选择 (35)3.5.2 键的校核 (36)3.6 联轴器的选择 (37)3.7 箱体尺寸及附件的设计 (38)第4章 SOLIDWORKS的建模与运动仿真 (43)4.1 建模软件的介绍 (43)4.2 行星齿轮机构的建模 (43)4.2.1 对行星齿轮的建模 (43)4.2.2 行星齿轮其他部件的建模 (45)4.3 行星齿轮机构的虚拟装配 (47)4.4 装配体的实现 (58)4.5 减速机的运动仿真 (60)4.5.1 仿真一般步骤 (60)4.5.2 机构运动分析的任务和方法 (61)4.5.3 运动的生成 (62)4.5.4 运动分析 (62)总结 (64)参考文献 (65)致谢 (66)第1章绪论1.1 国内外的研究状况及其发展方向国内对行星齿轮传动比较深入的研究最早开始于20 世纪60 年代后期,20 世纪70 年代制定了NGW 型渐开线行星齿轮减速器标准系列JB1799-1976。
基于多体动力学的行星齿轮传动系统研究
基于多体动力学的行星齿轮传动系统研究行星齿轮传动系统是一种高效率、高精度的传动装置,广泛应用于机械工程和自动化领域。
在过去的几十年里,随着计算机技术的飞速发展,研究人员开始更深入地研究行星齿轮传动系统的动力学行为。
多体动力学是一种用于描述和分析系统中多个物体之间相互作用的数学模型。
本文将探讨如何利用多体动力学方法研究行星齿轮传动系统。
首先,行星齿轮传动系统由太阳齿轮、行星齿轮和内齿轮组成。
太阳齿轮位于行星轴的中心,内齿轮围绕太阳齿轮旋转,行星齿轮与太阳齿轮和内齿轮相连接。
传动比由齿轮的尺寸和齿数决定,控制了输出轴的旋转速度和力矩。
在多体动力学模型中,每个齿轮被建模为一个刚体,其运动由牛顿力学定律描述。
通过建立各个齿轮的运动方程,并考虑他们之间的接触和相互作用力,可以分析传动系统的动力学行为。
其中的关键问题是确定行星轮和内齿轮的轨迹和接触点,以及计算系统中的力和力矩。
在传动系统中,齿轮的接触问题是一个重要的研究方向。
行星齿轮传动系统的齿轮接触分析包括接触点位置确定和接触力计算两个方面。
接触点位置的确定需要考虑到齿轮的几何参数和初始位置,可以通过数值求解等方法得到。
接触力的计算涉及到齿轮之间的接触力和支撑力,并且需要考虑到张力、撞击和摩擦等因素。
此外,传动系统的动力学分析还需要考虑到诸如振动、噪声和寿命等方面的问题。
通过对行星齿轮传动系统的多体动力学模型进行仿真和分析,可以评估系统的性能和可靠性,并优化设计和参数选择。
例如,在避免共振、降低振动和噪声水平以及提高传动效率方面,多体动力学分析可以发挥重要作用。
综上所述,基于多体动力学的行星齿轮传动系统研究为我们深入理解传动机构的运行原理和行为提供了一个有效的方法。
通过对齿轮接触、力学行为和系统性能进行建模和仿真,我们可以更好地优化传动系统的设计和运行。
尽管研究中还存在许多问题和挑战,但多体动力学方法无疑将持续为行星齿轮传动系统的研究和应用提供重要支持。
车辆动力学行星齿轮传动建模分解课件
车辆动力学主要研究车辆行驶过程中的动态性能,包括牵引性能、制动
性能、操作稳定性和行驶平顺性等。
03
耦合关系的重要性Βιβλιοθήκη 行星齿轮传动与车辆动力学之间存在密切的耦合关系,行星齿轮传动的
性能直接影响车辆的动力学性能,因此需要对两者进行耦合建模以实现
更精确的仿真和分析。
行星齿轮传动与车辆动力学的耦合模型
1 2 3
耦合效应的实际意义
通过对耦合效应的分析,可以深入了解行星齿轮传动与车 辆动力学之间的相互关系和影响机制,为优化车辆设计和 性能提供理论支持和实践指点。
05
实例分析与应用
某型汽车行星齿轮传动的动力学分析
总结词
详细描述
该部分第一介绍了车辆动力学行星齿轮传动 的基本概念和原理,然后以某型汽车为例, 详细讲授了其行星齿轮传动的动力学分析过 程,包括模型建立、参数设置、结果分析等 。
总结词
该部分主要讲述了某型汽车的动力学仿真与优化过程。通过仿真分析,得到了该型汽车在不同工况下 的动力学特性,并针对不良工况进行了优化设计。
详细描述
在某型汽车的动力学仿真方面,采用了专业仿真软件对该型汽车进行了动力学仿真分析,得到了其在 不同工况下的动力学特性。在优化设计方面,根据仿真结果,针对不良工况进行了优化设计,包括改 变齿轮参数、调整悬挂系统等措施,最终提高了该型汽车的整体性能。
建立耦合模型的方法
通过将行星齿轮传动的运动方程与车辆动力学方 程进行耦合,建立行星齿轮传动与车辆动力学之 间的耦合模型。
耦合模型的基本组成
耦合模型包括行星齿轮传动的运动方程和车辆动 力学方程,其中涉及到的变量包括转速、转矩、 加速度等。
模型简化与假设
为了简化模型并使其更易于分析,通常需要对模 型进行假设和简化,例如假设传动系统为线性系 统,忽略阻尼等次要因素。
行星齿轮建模方法
行星齿轮建模方法全文共四篇示例,供读者参考第一篇示例:行星齿轮是一种常见的传动装置,广泛应用于机械制造领域。
行星齿轮具有结构紧凑、传动效率高、承载能力强等优点,因此在各种机械设备中被广泛应用。
行星齿轮的设计和制造是一项复杂的工程,需要掌握高级的建模技朧。
本文将介绍一种常用的行星齿轮建模方法,希望对从事机械设计和制造领域的工程师和技术人员有所帮助。
一、行星齿轮的结构和工作原理行星齿轮是一种特殊的齿轮传动装置,由太阳齿轮、行星齿轮和内齿圈组成。
太阳齿轮位于中心,行星齿轮围绕太阳齿轮旋转,内齿圈则是行星齿轮的外部。
当太阳齿轮转动时,行星齿轮和内齿圈也随之转动,实现了传动作用。
二、行星齿轮建模的基本步骤行星齿轮的建模是一项复杂的工程,需要通过计算机辅助设计软件来完成。
下面介绍一种常用的行星齿轮建模方法,包括以下基本步骤:1. 确定行星齿轮的传动比和结构参数:首先要确定行星齿轮的传动比,即行星齿轮和太阳齿轮的齿数比值。
然后确定行星齿轮的结构参数,包括齿轮的压力角、齿距等。
2. 绘制行星齿轮的三维模型:通过CAD软件绘制行星齿轮的三维模型,包括太阳齿轮、行星齿轮和内齿圈三部分。
在绘制过程中需要考虑行星齿轮的结构和尺寸参数。
通过调整模型的参数,优化行星齿轮的设计。
3. 完成齿轮的设计和生成齿条:根据行星齿轮的结构参数和传动比,设计行星齿轮的齿条。
可以采用齿轮设计软件来生成齿条,保证齿轮的准确性和精度。
4. 进行齿轮的强度分析:通过有限元分析软件对行星齿轮进行强度分析,评估其受力性能和承载能力。
根据分析结果优化行星齿轮的结构,提高其传动效率和稳定性。
5. 完善齿轮的制造工艺:根据行星齿轮的设计要求,制定相应的制造工艺流程。
确保齿轮的加工精度和表面质量,提高齿轮的使用寿命和可靠性。
三、行星齿轮建模的关键技术和注意事项1. 行星齿轮建模是一项复杂的工程,需要掌握高级的CAD软件技术和齿轮设计原理。
工程师和技术人员应该具备相关的专业知识和技能,熟练运用CAD软件进行建模和分析。
2K-H行星齿轮传动优化设计数学 建模与解算
2K-H行星齿轮传动优化设计数学建模与解算【摘要】本文针对2K-H行星齿轮传动进行优化设计,通过数学建模和解算方法,提出了一种有效的优化设计方案。
首先介绍了行星齿轮传动的基本原理,然后详细分析了2K-H行星齿轮传动的结构特点。
在数学建模方法部分,提出了如何利用数学模型来优化设计方案。
接着通过解算过程展示了优化设计的具体步骤。
在对设计优化结果进行评价,并总结了研究成果。
展望了未来研究方向,为行星齿轮传动的进一步优化提供了参考。
本研究对于提高行星齿轮传动的性能和效率具有重要意义,为相关领域的研究和发展提供了有益的启示。
【关键词】关键词:行星齿轮传动、2K-H行星齿轮传动、优化设计、数学建模、解算过程、设计评价、研究成果、未来展望。
1. 引言1.1 研究背景在实际应用中,2K-H行星齿轮传动的设计和优化仍然存在一些问题和挑战。
传统的设计方法往往过于依靠经验和试错,难以确保设计的最优性。
通过数学建模和优化设计,可以有效地提高2K-H行星齿轮传动的性能和效率。
本文旨在通过对2K-H行星齿轮传动的数学建模与解算进行深入研究,提出一种优化设计方案,并通过解算过程验证设计结果的有效性。
通过本研究,可以为2K-H行星齿轮传动的设计和应用提供理论基础和技术支撑。
部分将围绕行星齿轮传动的发展历程、2K-H行星齿轮传动的特点和存在的问题进行介绍和分析,为后续的研究工作奠定基础。
1.2 研究目的研究目的是通过对2K-H行星齿轮传动进行优化设计,提高其传动效率和工作性能。
具体目的包括:优化齿轮的结构参数,减小传动系统的摩擦损失和能量损失;提高传动系统的传动精度和稳定性,降低噪声和振动水平;提高传动系统的承载能力和寿命,增强其工作可靠性和耐久性。
通过数学建模和解算分析,寻找最佳的设计方案,使得2K-H行星齿轮传动在实际工程应用中能够发挥最佳效果,满足不同领域和行业的需求。
通过本研究的成果,为行星齿轮传动的设计优化提供新的思路和方法,推动行星齿轮传动技术的发展和应用,为相关领域的工程设计和制造提供技术支持和参考依据。
2K-H行星齿轮传动优化设计数学 建模与解算
2K-H行星齿轮传动优化设计数学建模与解算作者:史素华来源:《中阿科技论坛(中英阿文)》2019年第01期摘要:通过研究2K-H行星轮系的设计要求及分析各种约束条件,以最小体积为目标建立数学模型。
在确定设计变量,建立目标函数后,利用约束变尺度优化算法和Fortran语言编程进行最优化的求解。
关键词:行星齿轮传动;优化设计;m数学建模渐开线行星齿轮传动与普通定轴齿轮传动相比具有承载能力大、体积小、效率高、重量轻、传动比大、噪音小、可靠性高、寿命长、便于维修等优点,广泛应用于小汽车、重型载重汽车、工程车辆和飞机等的传动系中[1]。
研究指出,同一制造精度下,行星传动比起定轴线固定传动,载荷一般沿齿宽分布得较好[2]。
这是由于在行星传动中齿宽对直径的比值一般不超过0.7,而在普通减速器中却达到1.6,在个别情况下,例如在涡轮机减速器中则显著超过此值。
在同样条件下,行星传动的箱体重量比普通定轴齿轮传动的箱体其重量要小好几倍,因为行星传动箱体外廓尺寸比普通定轴齿轮传动的箱体要小得多。
设计行星传动时,正确选择齿轮参数的意义远比设计普通定轴传动的大。
齿轮参数选择不当时,不但可能丧失在外廓尺寸和重量方面的优点,甚至可能得到不利于使用的传动。
按最小体积为目标对行星齿轮机构进行最优化设计,不仅对缩小体积,而且对减小质量、节约材料及降低成本等都是很有实效的,这些对汽车及飞机这一类的产品尤其重要[3]。
现在就以这类产品中常采用的2K-H型行星齿轮机构作优化设计。
一、2K-H行星齿轮设计要求对于2K-H行星齿轮,如右图所示,要设计一个符合条件的行星齿轮传动,需要根据已知条件确定齿轮的几个参数:各齿轮的齿数z,模数m,齿宽b,如果将行星轮的个数也作为设计变量,则有四个参数。
根据机械设计知识,行星齿轮参数需要满足以下两种条件:一是几何设计条件就是在不考虑材料视齿轮为刚体的情况下齿轮正常传动的条件;二是齿轮的强度条件,行星齿轮作为一种机械构件,需要在确定材料的情况下对强度作一定的要求,保证齿轮到达预期寿命[4]。
运输车辆传动系统动力学建模与分析
运输车辆传动系统动力学建模与分析运输车辆是现代交通运输中发挥重要作用的关键工具。
为了保证运输车辆的安全性和稳定性,必须对其传动系统进行动力学建模和分析。
本文旨在探讨运输车辆传动系统的动力学特性,并提供一些分析方法和实用建议。
传动系统是运输车辆中的核心部件,它负责将发动机的动力传输到车轮,驱动车辆行驶。
传动系统由多个组成部分构成,包括发动机、离合器、变速器、传动轴、差速器和驱动轴等。
这些组成部分之间的协调运动至关重要,影响着整个车辆的动力性能和燃油经济性。
在进行动力学建模和分析之前,我们首先需要了解传动系统的基本工作原理。
当发动机输出动力时,离合器负责将动力传递给变速器。
变速器可以根据车辆的实际运行需求,选择合适的齿轮组合来改变车速和引擎转速。
传动轴则将变速器输出的动力传递给驱动轮,通过差速器使两个驱动轮能够以不同的转速旋转,以适应转弯和车辆行驶过程中的不平路面。
传动系统的动力学特性主要包括传动效率、扭矩变化和轴线变形等方面。
传动效率是指传动系统将发动机输出的动力转化为有效驱动车辆行驶所需的能量比例。
传动效率的高低直接影响着车辆的燃油经济性和动力性能。
因此,在传动系统设计和优化中,提高传动效率是一个重要的研究方向。
扭矩变化是传动系统动力学中的另一个重要参数。
由于传动系统中的不同组成部分有不同的质量和惯性特性,因此在传递动力的过程中会发生扭矩的变化。
这种扭矩变化会导致车辆在行驶过程中出现颠簸和振动,对驾驶员的操控稳定性造成影响。
因此,减小扭矩变化是提高车辆行驶平稳性的关键。
此外,传动系统的轴线变形也是值得关注的一个问题。
在高速行驶和重载情况下,传动轴和驱动轴可能发生一定的弯曲和变形,进而影响车辆的操控和行驶安全。
因此,在传动系统设计和优化中,需要考虑合适的材料和结构来减小轴线变形,并提高传动系统的可靠性和耐用性。
针对以上问题,研究人员提出了多种分析和优化方法。
例如,可以使用数学模型和仿真软件来模拟传动系统的运动规律和相关参数变化。
车辆动力学(4)-齿轮机构建模
二、行星齿轮机构模型
车辆传动应用的典型行星机构
(a)单星行星排 ,(b)复星行星排, (c、d)双星行星排 (e、f)锥齿差速器, (g、h)柱型差速器
二、行星齿轮机构模型
2. 行星机构转速方程
太阳轮s
齿圈r
行星机构三基本构件
行星架c
二、行星齿轮机构模型
2. 行星机构转速方程
rp c
s
行星齿轮传动转速分析
(1)单星行星排
每个行星轮 同时与两个中心轮相 啮合。结构最简单, 应用最广泛。
二、行星齿轮机构模型
(2)内外啮合双联排
行星轮为复 式双联齿轮。
二、行星齿轮机构模型
(3)外啮合双联排
行星轮为复 式双联齿轮。
二、行星齿轮机构模型
(4)内啮合双联排
行星轮为复 式双联齿轮。
二、行星齿轮机构模型
(5)内外啮合双星行星排
10 9
8
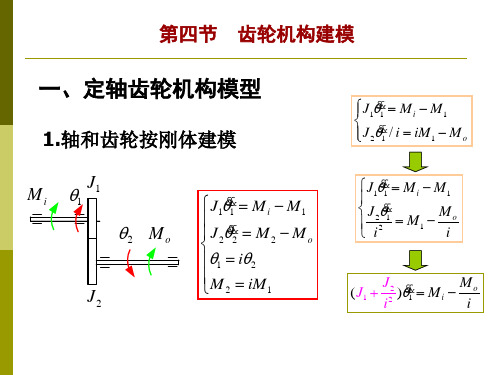
一、定轴齿轮机构模型
3. 轮齿和轴均按弹性体建模
动态传递误差x 静态误差e
θ1
J1
M1
r1
e km
cm
x ——啮合线上两齿轮的相对位移, x r11 r22
e —— 轮齿啮合综合误差 , e(t) eh cos(ht e )
传动误差: x e r11 r22 e
θ2
M2
J2
r2
一、定轴齿轮机构模型
3. 轮齿和轴均按弹性体建模
θ1
θ2
J1
M1
r1
e km
M2
J2
r2
cm
J11 J 22
M1 Fd r2
Fd r1 M
2
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
M s : M r : M c 1: k : (1 k )
ns knr (1 k )nc 0
Jc0 =Jc +Nmp Rc 2
Jc—行星架转动惯量 mp—行星轮质量 N —行星轮个数
二、纯扭刚体动力学模型
例 4:
d s Js Mi M s dt d c J c0 Mc M f dt
S M F
P B
{D} {D}
Clutch B
Clutch D Output Carrier /Input Ring Inertia
R C R S C
Input Carrier /Output Ring Inertia 2 In Input Planetary Gear
1 Out
S
Input Sun Inertia
M s1 M i M r1 2.8M i M c1 3.8M i
二、纯扭刚体动力学模型
d s Js M s M se dt d r Jr M r M re dt dc Jc0 M c M ce dt
外力矩符号 根据外力矩 方向确定 内力矩符号 根据传递路 线确定
单行星排:
J ss Rs Fspj M se
j 1 N N
J rr Rr Frpj M rb
j 1
( J c J pj Rc2 mpj )c J pjpj Rs Fspj Rr Frpj M cf
j 1 j 1 j 1 j 1 j 1
M s : M r : M c 1: k : (1 k )
ns (1 k )nc 0
二、纯扭刚体动力学模型
例 5:
制动器C
制动器D
离合器B 离合器R 离合器A
输入
输出
4前1倒变速机构
二、纯扭刚体动力学模型
{B} {B}
P B
S M F
SlipB ModeB
SlipD ModeD
Output Sun Inertia
Output Planetary Gear
SlipC {R} {R}
B P S M F
SlipR ModeR
ModeC
S M F B P
OutSpeed {C} {C} {A} {B} {C} {D} {R} Clutch Pressures
5 5
v
Clutch R
ns nc zr n r nc zs
行星排特性参数
ns knr (1 k )nc 0
zs np ns nc zp
一、静力学模型
3. 行星传动转矩关系式
zr Rr z s Rs
k
1 Rc Rr Rs 2
(1 k ) Rs : Rr : Rc 1: k : 2
N
N
N
N
N
Jpjpj Jpjc Rpj Fspj Rpj Frpj 0
( j 1,2
N)
F为动态啮合力。根据需要选择线性的或者非线性的。
练习:行星传动动力学建模
Inventors:Raghavan
GM
2008,11,18
3自由度3排6前1倒
Fs : Fr : Fc 1:1: 2
M s : M r : M c 1: k : (1 k )
一、静力学模型
4. 静力学模型
M s : M r : M c 1: k : (1 k )
ns knr (1 k )nc 0
例1:汽车差速器
1 M1 M 2 M 0 2 n1 n2 2n0
第一章 第五节 行星传动系统建模
一、静力学模型(转速、转矩关系式)
二、纯扭刚体动力学模型
三、纯扭弹性体动力学模型
第二章 车辆传动系关键部件建模 一、静力学模型 1.行星轮系
r-齿圈
单星(内外啮合)行星排
c-行星架
一、静力学模型
2. 行星传动转速方程
r p c s
行星齿轮传动转速分析
相对行星架
zr k zs
Clutch C {A} {A}
P B S M F
SlipA ModeA
1 P
InSpeed
Clutch A
simulink仿真模型
Double -click to show Clutch日方程
d T T U V 单行星排:dt ( ) Qi (i 1, 2, i i i i ,3 N )
i K2=1.9 K1=2.8
o KR=1.9
ni k1n1 1 k 1 no 0 n1 1 kR no 0
转矩关系式 构件转矩平衡
iR ni / no 4.32
M s 2 2.8M i M r 2 5.32M i M c 2 -8.12M i
T Ts Tr Tc Tpj
N
Qi为非保守广义力
1 Ts J ss 2 2 1 Tr J r r 2 2
Tc
j 1
1 J c c 2 2 2 1 1 Tpj J pj pj c mpj Rc2 c 2 2 2
三、纯扭弹性动力学模型
一、静力学模型
例2:防滑差速器
防滑差速器:直接切断一路功率输出,使得功率从另 外的通路传递
1 M1 M 2 M 0 2
滑转一侧制动时转速关系为:
n1 0,n2 2n0
一、静力学模型
例3:行星变速机构转速和 转矩分析。1)分析倒档传 动比。2)分析倒档各元件 转矩。
C B2 B1 BR