半自动平压模切机设计说明书
半自动平压模切机的设计
半自动平压模切机的设计设计半自动平压模切机摘要平压模切机广泛应用于印刷和包装行业。
本文介绍了一种半自动平压模切机的设计。
该机器使用了PLC控制系统,实现了自动送料、自动压模切割和自动排废功能。
通过对机械结构、传动系统和控制系统的详细设计,确保了机器的稳定性和可靠性。
最后进行了样机试制并对其性能进行了测试,证明了设计的有效性。
关键词:平压模切机,PLC控制,自动化,性能测试1.引言2.设计原理首先,利用PLC控制系统实现机器的自动化控制。
通过编程,可以实现自动送料、自动压模切割和自动排废功能。
PLC控制系统可以实现快速、准确的控制,增加了机器的稳定性和可靠性。
其次,设计合理的机械结构,保证机器的稳定性和可靠性。
机械结构主要包括底盘、送料装置、压模装置和排废装置等部分。
底盘用于支撑整个机器,保证机器的稳定性。
送料装置可以实现快速、准确的送料,确保了生产效率。
压模装置负责压模和切割操作,需要满足压力均匀、压割尺寸准确的要求。
排废装置能够及时清除切割废料,保持模切区域的清洁。
最后,设计可靠的传动系统,保证机器的正常运转。
传动系统主要包括电机、减速器、齿轮传动和皮带传动等部分。
电机提供动力,驱动机器的运行。
减速器和齿轮传动能够实现动力的传递和转速的调节。
皮带传动可以实现机械部件之间的连接,确保运转的稳定性。
3.详细设计(1)机械结构设计底盘采用一体式设计,选用优质钢材制成。
底盘上设置送料装置、压模装置和排废装置等部件的安装座位。
送料装置采用滚轮送料方式,将待模切的材料送入模切区域。
在滚轮上设置一个光电开关,用于检测材料位置,保证送料的准确性。
压模装置包括上模锁定装置和压模台等部分。
上模锁定装置通过一个液压缸实现,确保模具的稳定性。
排废装置采用吸尘装置和废料收集箱的组合。
吸尘装置吸取切割废料,并送入废料收集箱中。
吸尘装置通过电机提供动力,确保废料的快速排出。
(2)传动系统设计电机通过减速器和齿轮传动连接到机械结构上。
半自动平压模切机机械原理设计
半自动平压模切机机械原理设计1. 引言半自动平压模切机是一种常用的机械设备,用于将纸板、塑料、皮革等材料模切成所需形状。
本文将介绍半自动平压模切机的机械原理设计。
2. 设计目标半自动平压模切机的设计目标是实现高精度的模切,并确保操作的安全性和便捷性。
具体要求如下:1.切割精度:±0.1mm;2.生产效率:每分钟100次以上;3.安全性:设有安全感应装置,确保操作人员的安全;4.操作便捷性:采用人机界面,方便操作。
3. 机械结构设计半自动平压模切机的机械结构主要包括以下部分:1.上模具:用于切割材料的模具,可以根据需要更换不同形状的模具;2.下模具:用于支撑材料的模具,固定在机器的底部;3.传动系统:包括电机、减速机和传动轴,用于驱动上模具进行切割;4.操作台:设有按键和显示屏,用于操作和监控机器;5.安全感应装置:通过传感器来检测操作人员的位置和动作,以确保安全。
4. 工作原理半自动平压模切机的工作原理如下:1.操作人员将材料放置在机器的工作台上,并根据需要调整材料的位置和方向;2.操作人员在操作台上选择所需的模具,并通过按键启动机器;3.电机带动传动系统,传动轴旋转,使上模具向下压力增加;4.上模具向下施加一定压力时,与下模具接触并切割材料;5.切割完成后,上模具自动回弹,操作人员取出切割好的材料;6.安全感应装置会在操作人员离开安全区域时自动停止机器运行,确保操作人员的安全。
5. 设计考虑在机械原理设计过程中,需要考虑以下因素:1.切割力度:根据材料的硬度和厚度,设计合适的切割力度;2.切割速度:根据生产需求,确定合适的切割速度,以提高生产效率;3.传动系统:选择适当的电机和减速机,保证稳定的传动效果;4.操作台设计:设计人性化的人机界面,方便操作和监控机器;5.安全性考虑:采用安全感应装置,并确保其可靠性,以保证操作人员的安全。
6. 结论半自动平压模切机机械原理设计是实现高精度模切和保障操作安全的关键。
半自动平压模切机的课程设计书
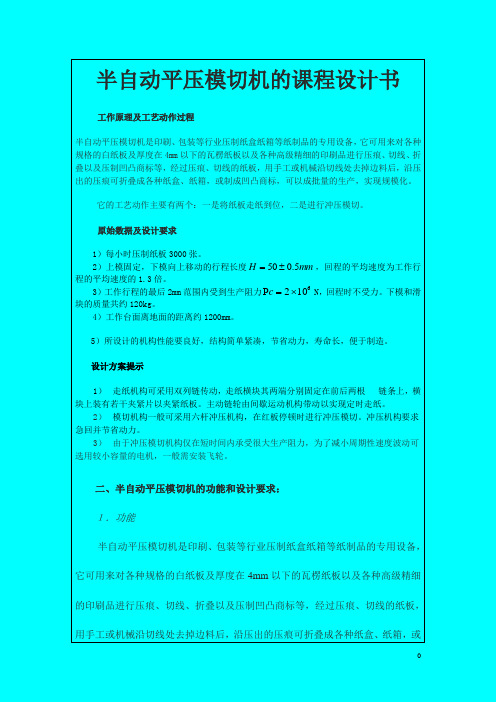
半自动平压模切机的课程设计书工作原理及工艺动作过程半自动平压模切机是印刷、包装等行业压制纸盒纸箱等纸制品的专用设备,它可用来对各种规格的白纸板及厚度在4mm 以下的瓦楞纸板以及各种高级精细的印刷品进行压痕、切线、折叠以及压制凹凸商标等,经过压痕、切线的纸板,用手工或机械沿切线处去掉边料后,沿压出的压痕可折叠成各种纸盒、纸箱,或制成凹凸商标,可以成批量的生产,实现规模化。
它的工艺动作主要有两个:一是将纸板走纸到位,二是进行冲压模切。
原始数据及设计要求1)每小时压制纸板3000张。
2)上模固定,下模向上移动的行程长度mm H 5.050±=,回程的平均速度为工作行程的平均速度的1.3倍。
3)工作行程的最后2mm 范围内受到生产阻力6102⨯=P c N ,回程时不受力。
下模和滑块的质量共约120kg 。
4)工作台面离地面的距离约1200mm 。
5)所设计的机构性能要良好,结构简单紧凑,节省动力,寿命长,便于制造。
设计方案提示1) 走纸机构可采用双列链传动,走纸横块其两端分别固定在前后两根 链条上,横块上装有若干夹紧片以夹紧纸板。
主动链轮由间歇运动机构带动以实现定时走纸。
2) 模切机构一般可采用六杆冲压机构,在红板停顿时进行冲压模切。
冲压机构要求急回并节省动力。
3) 由于冲压模切机构仅在短时间内承受很大生产阻力,为了减小周期性速度波动可选用较小容量的电机,一般需安装飞轮。
二、半自动平压模切机的功能和设计要求:1.功能半自动平压模切机是印刷、包装等行业压制纸盒纸箱等纸制品的专用设备,它可用来对各种规格的白纸板及厚度在4mm 以下的瓦楞纸板以及各种高级精细的印刷品进行压痕、切线、折叠以及压制凹凸商标等,经过压痕、切线的纸板,用手工或机械沿切线处去掉边料后,沿压出的压痕可折叠成各种纸盒、纸箱,或制成凹凸商标,可以成批量的生产,实现规模化。
压纸工艺过程分为“走纸”和“且模”。
上模固定,下模冲压。
半自动平压模切机设计说明书

半自动平压模切机设计说明书1. 引言半自动平压模切机是一种用于纸张、塑料薄膜等材料的模切加工的设备。
本设计说明书旨在介绍半自动平压模切机的设计原理、结构以及使用方法,以供相关人员参考和使用。
2. 设计原理半自动平压模切机的工作原理是利用模切刀具对材料进行切割,通过机械传动使模切刀具作往复运动,将材料切割为所需形状。
机械传动系统由电动驱动装置、减速机、传动齿轮和连杆机构等组成。
切割过程中,需要应用一定的压力对模切刀具施力,以确保切割质量。
为此,设计了机械增力系统,通过手动操作使切割压力达到设定值。
3. 结构设计3.1 主体结构半自动平压模切机的主体结构由底座、机架和工作台组成。
底座固定在地面上,起到承重和稳定的作用。
机架由钢材焊接而成,用于支撑和固定各个部件。
工作台用于放置和固定模切刀具和材料。
3.2 传动系统半自动平压模切机的传动系统采用电动驱动装置与减速机的组合,实现模切刀具的往复运动。
电动驱动装置通过电机驱动减速机输出动力,传动齿轮将旋转运动转换为直线运动,连杆机构将运动传递给模切刀具。
3.3 增力系统为了实现模切刀具的施力,设计了增力系统。
增力系统由手轮、丝杆、螺母和压力传感器等组成。
通过手动旋转手轮,使丝杆带动螺母移动,从而改变模切刀具的位置,施加所需的切割压力。
压力传感器用于监测切割压力,确保切割质量。
4. 使用方法半自动平压模切机的使用方法如下:1.将待切割的材料放置在工作台上,将模切刀具固定在刀架上。
2.打开电动驱动装置的电源,启动机械传动系统。
3.通过手动旋转手轮,调整增力系统,施加适当的切割压力。
4.按下开关,启动模切刀具的运动,开始切割材料。
5.切割完成后,关闭电动驱动装置的电源,停止机械传动系统。
6.将切割好的材料取出,并清理工作台和刀具。
5. 安全注意事项使用半自动平压模切机时,需要注意以下安全事项:•在操作之前,务必熟悉机器的结构和使用方法,并遵循操作规程。
•在使用过程中,应戴好安全手套,注意刀具的锋利性,以防切割伤害。
半自动平压模切机的设计
目录第一章概述 (1)1.1课题来源 (1)1.2课题研究目的及意义 (1)第二章方案选型 (2)2.1 根据工艺动作要求拟定运动循环图 (2)2.2 送料模切机构选型 (3)2.3 机械运动方案的评定和选择 (6)2.4 电动机的选型 (11)第三章机械传动设计 (14)3.1传动比的分配 (14)3.2计算传动装置的运动参数和动力参数。
(14)3.3V带传动设计 (15)3.4减速器的齿轮设计 (16)3.5轴的设计 (20)3.6轴承的选择和校核计算 (24)3.7平面六杆滑块机构设计 (26)3.8凸轮机构的设计 (27)3.9链条及链轮的设计 (28)参考文献总结致谢半自动平压模切机摘要机械设计是工科高等学校机械类,机电类等专业必修的一门技术基础课,我们在学习基础知识的同时,也应更加注重对知识的整体运用和实践。
作者设计的半自动平压模切机是印刷包装行业压制纸盒、纸箱等纸制品的专用设备。
本文从拟定运动循环图出发,通过查找机械设计手册,比较不同方案,选择了最合适的传动系统和执行机构,并且对其工作原理,结构设计和几何参数进行了深刻的分析和探讨。
作者运用优秀的Auto cad将设计的装置形象,直观的描绘出来了。
该模切机具有结构简单,紧凑,效率高,易操作的特点。
关键词:机械设计半自动平压模切机Auto cadSemi automatic die-cutting machineAbstractMechanical design is an engineering college machinery, electrical and other specialized types of a compulsory basic course of technology, we study the basic knowledge at the same time, should also pay more attention to the knowledge of the overall application and practice. The author designed semi-automatic die-cutting machine is the printing and packaging industry press boxes, cartons and other paper products and special equipment. This paper proposed the motion cycle chart from the start, through the search of mechanical design manual, comparison of different options, select the most suitable transmission system and executing mechanism, and its working principle, structure design and geometric parameters of an in-depth analysis and discussion. The excellent Auto CAD will design the device image, intuitive outlined. The cutting machine has the advantages of simple structure, compact structure, high efficiency, easy to operate.Key words: Mechanical Design Semi automatic die-cutting machine AutoCAD第一章概述1.1课题来源本课题属于自主选题,其研究目标为设计可对各种规格的纸板、厚度在4 mm 以下的瓦楞纸板,以及各种高级精细的印刷品进行压痕、切线、压凹凸的模切机。
半 自 动 平 压 模 切 机
3,设计任务
1)进行走纸机构、冲压模切机构及夹紧纸板的控制机构的选型。 2)根据工艺动作顺序和协调要求拟定运动循环图。 3)根据选定的原动机和执行机构的运动参数拟定机械传动方案。 4)机械运动方案的评定和选择。 5)对机械传动系统和执行机构进行运动尺寸计算。 6)进行计算辅助分析。 7)画出机械运动方案简图、运动循环图和传动方案图。 8)完成设计计算说明书一份。
4,工作计划与进度安排
步骤 1 2 3 4 5 6 内容 上课、熟悉题目 方案设计、分析 尺寸综合、绘图 上机计算、分析 整理说明书、图纸 答辩 要求 分组、了解题目 方案分组比较 图解法、解析法等 分析机构运动受力 说明书统一格式 交说明书、图纸 时间(天) 1 2 3 2 1 1
3
机械原理课程设计
6
机械原理课程设计
四、设计Байду номын сангаас案分析
根据半自动平压切模机的工作原理, ,把机器完成加工要求的动作分解 成若干种基本运动。 进行机械运动方案设计时, 最主要的是要弄清设计要求 和条件, 掌握现有机构的基本性能, 灵活地应用现有机构或有创造性地构思 新的机构, 以保证机器有完善的功能和尽可能低的成本。 对本题进行机械运 动方案设计时应考虑以下问题: (1)设计实现下模往复移动的机构时,要同时考虑机构应满足运动条件 和动力条件。例如实现往复直线移动的机构,有凸轮机构、连杆机构、螺旋 机构等。由于压制纸板时受力较大,宜采用承载能力高的平面连杆机构,而 连杆机构中常用的有四杆机构和六杆机构, 再从机构应具有急回特性的要求 出发,在定性分析的基础上,选取节省动力的机构。当受力不大而运动规律 又比较复杂时, 可采用凸轮机构。 例如本题中推动夹紧装置张开的控制机构, 由于加紧片张开后要停留片刻,故采用凸轮机构在设计上易于实现此要求, 且结构简单。 (2)为满足机器工艺需要,各机构执行构件的动作在规定的位置和时间 上必须协调,如下压模在工作行程时,纸板必须夹紧;在下压模回程时,纸 板必须送到压模位置。因此,为使各执行构件能按工艺要求协调运动,应绘 出机械系统的构件运动循环图。 (3) 根据机器要求每小时完成的加工件数, 可以确定执行机构主动件的 转速。若电机转速与执行机构的主动件转速不同,可先确定总传动比,再根 据总传动比选定不同的传动机构及组合方式。 (4) 在一个运动循环内仅在某一区间承受生产阻力很大的机器, 将引起 等效构件所受的等效阻力矩有明显是周期性变化, 若电动机所产生的驱动力 矩近似的认为是常数, 则将引起角速度的周期性波动。 为使主动做的角速度 较为均匀,应考虑安装飞轮。可适当选择带传动的传动比,使大带轮具有一 定的转动惯量而起飞轮的作用,通常应计算大带轮的转动惯量是否满足要 求,如不满足,则需另外安装飞轮。
设计报告书
目录一、设计题目 (3)(一)半自动平压模切机的用途 (3)(二)半自动平压模切机的工作原理 (3)(三)半自动平压模切机的工艺动作过程 (4)二、技术参数和设计要求 (5)三、走纸机构、冲压模切机构及加紧纸板的控制机构的选型 (5)(一)走纸机构的选型 (5)(二)冲压模切机构的选型 (6)(三)加紧纸板的控制机构的选型 (6)四、运动循环图 (7)五、原动机的选择与各机构的转速 (8)(一)原动机 (8)(二)夹纸机构运动 (8)(三)走纸机构运动 (8)(四)冲压机构运动 (9)六、设计方案及讨论 (9)(一)实现下模往复移动的执行机构 (9)(二)传动机构 (12)(三)控制夹紧装置的机构 (12)七、机械传动系统和执行机构的尺寸计算 (14)(一)极位角的计算 (14)(二)总传动比的计算 (14)(三)传动比分配 (15)八、计算机辅助分析 (15)九、机械运动方案简图、远动循环图和传动方案图 (17)十、体会与心得 (18)十一、参考文献 (19)一、设计题目半自动平压模切机(一)半自动平压模切机的用途设计半自动平压模切机的模切机构。
半自动平压模切机是印刷、包装行业压制纸盒、纸箱等纸制品的专用设备,该机可对各种规格的白纸板、厚度在4mm以下的瓦愣纸板,以及各种高级精细的印刷品进行压痕、切线、压凹凸。
经过压痕、切线的纸扳,用手工或机械沿切线处去掉边料后,沿着压出的压痕可折叠成各种纸盒、纸箱,或制成凹凸的商标。
(二)半自动平压模切机的工作原理它的工艺动作主要有两个:一是将纸板走纸到位,二是进行冲压模切。
上模固定,下模冲压。
如图1-1所示,4为工作台面,工作台上方的1为双列链传动,2为主动链轮,3为走纸模块(共五个)其两端分别固定在前后两根链条上,横块上装有若干个夹紧片。
主动链轮由间歇机构带动,使双列链条作同步的间歇运动。
每次停歇时,链上的一个走纸模块刚好运动到主动链轮下方的位置上。
这时,工作台面下方的控制机构,其执行构件7作往复移动,推动横块上的夹紧装置,使夹紧片张开,操作者可将纸板8喂入,待夹紧后,主动链轮又开始转动,将纸板送到具有上模5(装调以后是固定不动的)和下模6的位置。
半自动平压模切机的课程设计书

机械原理机械设计课程设计说明书题目:半自动平压模切机作者:。
院系:.......班级:。
指导教师:。
2007年7月5日****机器原理、功能分解说明****图a所示,为走纸机构,实现纸板的输送、停歇、定位等要求,机构作间歇运动;夹子纸板的夹紧要求,机构作连续运动?/P>运动时双链上有5个夹条(可同时夹5快纸板),每个夹条上有2个夹子用来固定纸板。
大链轮用皮带轮从与4同轴的带轮10传递动力。
在这个过程中为了实现大链轮的间歇转动,采用特殊的齿轮11`,传递动力到11来带动大链轮。
?/P>7、7`为模切机构,由下模7的往复运动来实现纸板的冲压模切要求,机构作连续运动。
?/P>如图b所示模切机构,1和8为皮带轮。
其中1安装在电动机主轴上,9为一个安装在电动机主轴上的飞轮;1和1`,2和2`,3和3`,分别都是共轴的。
1,1`,2,2`,3,3`,4都为传动齿轮。
4`为和齿轮4同轴的凸轮。
?/P>电动机转动由3条皮带轮传递动力到齿轮组,由凸轮的回转带动连杆机构往复运动,带动下模进行往复冲压。
冲压过程有急回运动,冲程快速,回程慢速。
?/P>工作时,夹纸机构将操作者喂送的纸板7(图a)夹住,走纸机构将纸板送至模切位置停歇定位后,模切机构对纸板进行冲压模切;冲压模切的同时,夹纸机构又将下一块纸板夹住。
最后,走纸机构将模切完的纸板送至某一位置(图中未画出),夹纸机构松开使纸板落到收纸台上,完成一个工作循环。
这时,下一块纸板已被送至模切位置。
在冲压,走纸的协调中,11,11`起了很大的作用。
10,10`通过皮带传递与冲压机构相同的角速度到齿轮11的轴上,在间歇的带动11`转动,以实现走纸的间歇性。
半自动平压模切机的工作台高 1.2m,公用一台电动机,动作相互配合,运动协调?/P>**调节走纸与冲压的协调性**为了达到在下模冲压的时候,纸板能提前到位,可以调节11`的旋转位置来达到预定的效果。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
目录1.设计题目--------------------------------------------------------------------------------------22.给定的设计条件、数据及要求-----------------------------------------------------------23.设计步骤--------------------------------------------------------------------------------------21)原动机的选择--------------------------------------------------------------------------------32)传动机构的选择与比较--------------------------------------------------------------------43)执行机构的选择与比较--------------------------------------------------------------------54)机械系统运动方案的拟定和比较--------------------------------------------------------55)机械系统的运动循环图--------------------------------------------------------------------86)所选机构的设计与分析--------------------------------------------------------------------87)机械运动方案布置图及机械运动简图-------------------------------------------------12 8)完成设计所用方法及其原理的简要说明--------------------------------------------134.主要参考资料-------------------------------------------------------------------------------135.附录--------------------------------------------------------------------------------------------14半自动平压模切机设计说明书1设计题目:半自动平压模切机工作原理及工艺动作过程:纸板压痕机是印刷、包装行业压制纸盒、纸箱等纸制品的专用设备,该机可对各种规格的白纸板、厚度在4mm以下的瓦愣纸板,以及各种高级精细的印刷品进行压痕、切线。
压凹凸。
经过压痕、切线的纸扳,用手工或机械沿切线处去掉边料后,沿着压出的压痕可折叠成各种纸盒、纸箱,或制成凹凸的商标。
它的工艺动作主要有两个:一是将纸板走纸到位,二是进行冲压模切。
2 原始数据及设计要求:1、每小时压制纸板3000张。
2、上模固定,下模向上移动的行程长度H=50±0.5mm,回程的平就那速度为工作形行程的平均速度的1.3倍。
3、工作行程的最后两毫米范围内受到生产阻力p c=2×106N回程时不受力。
下模和滑块的质量共约120kg。
4、工作台离地面的距离约1200mm。
5、所设计机构的性能要良好,结构简单紧凑,节省动力,寿命长,便于制造。
3 设计步骤1)电动机的选择电动机工作时的功率:P=2*10^6*2*10^(-3)/1.2=3.333kw所以电动机额定功率大于3.333kw以下为可选电动机型号:终选型:Y 132S-42)传动机构选型方案一、电动机齿轮带轮齿轮传动优点:1、能保证瞬时传动比恒定,平稳性较高,传递运动准确可靠;2、可以实现较大传动比;3、传动效率高,使用寿命长;缺点:1、制造,安装要求较高。
方案二、电动机v型带链轮带轮传动:优点:1、结构简单,适用于两轴中心距较大的传动场合2、传动平稳无噪声缺点:1、不能保证精确地传动比链轮传动优点:1、传动距离远2、对工作环境要求不高;3、传递效率高缺点:1、交易磨损,维修不便;2、安装要求高;最终选型电动机齿轮带轮3)执行机构的选型方案一、凸轮凸轮优点:1、对于任意要求的从动件运动规律,都可以毫无困难地设计出凸轮轮廓来实现;2、占据空间小,结构紧凑;3、结构简单方案二、连杆机构连杆机构优点:1、可以传递较大动力;2、容易加工缺点:1、易产生强迫运动,不能用于高速场合;2、运动传递累计误差较大;3、压力角较大;最终选型凸轮4)机械系统运动方案的拟定和比较备选机构列表方案A:链轮传动---夹紧装置---平面连杆机构----齿轮和带轮;示意图:方案B:带轮传动----槽轮----直动推杆凸轮机构---齿轮和带轮示意图:最终方案:5)运动循环图6)所选机构的设计与分析;传动机构已知运动周期为 1.2s,所以主轴转速为1/1.2 r/s,又电动机转速为1440r/min,可得传动比为28.8。
传动系统如图,齿轮4与主轴同轴。
标准齿轮设计:以下为个齿轮参数齿轮1,2,2’,3,3’,4啮合效果如下图齿轮5,6为特殊齿轮,参数如下:5:模数:2 齿数:72 有效齿数:316:模数:2 齿数:72 有效齿数:72其他尺寸与标准齿轮相同啮合示意图如下:带轮设计:带轮1与带轮2直径相同D1=D2=80mm急回机构设计用附录1中的程序生成凸轮的轮廓数据如下数据:推程最大压力角是:29.8回程最大压力角是:36.7最小曲率半径是: 27.1基园最小半径为21用cad插件生成凸轮形状如下:7)机械运动方案布置图及机械运动简图主视图左视图三维效果图8)设计工作原理的简要说明电动机动力经由齿轮传递到主轴,带动凸轮运动从而对纸板进行冲压,主轴的动力经由皮带传递到特殊齿轮,特殊齿轮在凸轮回程是啮合并带动导轮运动,利用导轮与纸板间的摩擦力使纸板运动,如此循环往复达到冲压纸板的目的。
4 主要参考资料1 申永胜主编机械原理教程(第2版)。
2申永胜主编机械原理辅导与习题。
3 邹慧君主编机械原理课程设计手册。
4 /view/5748afd7c1c708a1284a442a.html5朱家成主编机械设计课程设计6 /view/4bb645170b4e767f5acfcef8.html7邹慧君.机械原理课程设计手册.北京:高等教育出版社,1998.6. 8申永胜.机械原理教程第二版.北京:清华大学出版社,2005.12. 9周开勤.机械零件手册第五版.北京:高等教育出版社,2001. 10 丁海军何坤金王林景雪琴程序设计基础(c语言)5 附录一、急回机构的主轴转角及行程、速度、加速度图二、形成凸轮轮廓的c语言程序#define pi 3.1415926#include<stdio.h>#include<math.h>main(){int h = 50,rb = 20,step_rb = 1;float max_go = pi / 5,max_back = pi * 2 / 5,r_min = 0,step_angel = pi / 720;float point_1 = 0,point_2 = 203.5/180*pi;float w = (point_2 - point_1) / (600 / 45.0);float t;float s,v,a,x,y,x_,y_,x__,y__,angel,yalijiao,r;float yalijiao_go_max = 0,min_r = 100000,yalijiao_back_max = 0;int i;FILE *fp;fp = fopen("凸轮轮廓.txt","wt");while (rb = rb + step_rb){angel = 0;i = 1;while (angel < 2 * pi){if (angel < point_1){if(rb < r_min)i = 0;}if (angel < point_2){s = h / 2 * (1 - cos(pi * (angel - point_1) / (point_2 - point_1)));yalijiao =atan( fabs(pi * h / 2 / (point_2 - point_1) * sin(pi / (point_2 - point_1) * (angel - point_1))) / (s + rb));x = (rb + s) * sin(angel);y = (rb + s) * cos(angel);x_ = pi * h / 2 / (point_2 - point_1) * sin(pi * (angel - point_1) / (point_2 - point_1)) * cos((angel - point_1)) - sin((angel - point_1)) * (rb + s);y_ = pi * h / 2 / (point_2 - point_1) * sin(pi * (angel - point_1) / (point_2 - point_1)) * sin((angel - point_1)) + cos((angel - point_1)) * (rb + s);x__ = pi * pi * h / 2 / (point_2 - point_1) / (point_2 - point_1) *cos(pi * (angel - point_1) / (point_2 - point_1)) * cos((angel - point_1)) - sin((angel - point_1)) * pi * h / 2 / (point_2 - point_1) * sin(pi / (point_2 - point_1) * (angel - point_1)) - cos((angel - point_1)) * (rb+s) - sin((angel - point_1)) * pi * h / 2 / (point_2 - point_1) * sin(pi * (angel - point_1) / (point_2 - point_1));y__ = pi * pi * h / 2 / (point_2 - point_1) / (point_2 - point_1) * cos(pi * (angel - point_1) / (point_2 - point_1)) * sin((angel - point_1)) + cos((angel - point_1)) * pi * h / 2 / (point_2 - point_1) * sin(pi / (point_2 - point_1) * (angel - point_1)) - sin((angel - point_1)) * (rb+s) + cos((angel - point_1)) * pi * h / 2 / (point_2 - point_1) * sin(pi * (angel - point_1) / (point_2 - point_1));r = (pow((x_ * x_ + y_ * y_),3.0 / 2)) / (x__ * y_ + x_ * y__);if (r < r_min && r >0 || yalijiao > max_go)i = 0;}else if (angel > point_2){s = h / 2 * (1 - cos(pi * (2 * pi - angel) / (2 * pi - point_2)));yalijiao =atan( fabs(pi * h / 2 / (2 * pi - point_2) * sin(pi / (2 * pi - point_2) * ((2 * pi - angel)))) / (s + rb));x = (rb + s) * sin(angel);y = (rb + s) * cos(angel);x_ = pi * h / 2 / point_2 * sin(pi * angel / point_2) * cos(angel) - sin(angel) * (rb + s);y_ = pi * h / 2 / point_2 * sin(pi * angel / point_2) * sin(angel) + cos(angel) * (rb + s);x__ = pi * pi * h / 2 / point_2 / point_2 * cos(pi * angel / point_2) * cos(angel) - sin(angel) * pi * h / 2 / point_2 * sin(pi / point_2 * angel) - cos(angel) * (rb+s) - sin(angel) * pi * h / 2 / point_2 * sin(pi * angel / point_2);y__ = pi * pi * h / 2 / point_2 / point_2 * cos(pi * angel / point_2) * sin(angel) + cos(angel) * pi * h / 2 / point_2 * sin(pi / point_2 * angel) - sin(angel) * (rb+s) + cos(angel) * pi * h / 2 / point_2 * sin(pi * angel / point_2);r = (pow((x_ * x_ + y_ * y_),3.0 / 2)) / (x__ * y_ + x_ * y__);if (r < r_min && r > 0 || yalijiao > max_back)i = 0;}angel = angel + step_angel;}if (i)break;}printf("角度距离速度加速度曲率半径x坐标y坐标\n");fprintf(fp,"角度距离速度加速度曲率半径x坐标y坐标\n");angel = 0;while (angel < 2*pi){if (angel < point_1){s = 0;v = 0;a = 0;x = (rb + s) * sin(angel);y = (rb + s) * cos(angel);r = rb;printf("%6.1f%6.1f %6.1f %6.1f %6.1f %6.1f %6.1f \n",angel * 180 / pi,s,v,a,fabs(r),x,y);fprintf(fp,"%6.1f %6.1f %6.1f %6.1f %6.1f %6.1f %6.1f\n",angel * 180 / pi,s,v,a,fabs(r),x,y);}else if (angel < point_2){s = h / 2 * (1 - cos(pi * (angel - point_1) / (point_2 - point_1)));v = pi * h * w / 2 / (point_2 - point_1) * sin(pi / (point_2 - point_1) * (angel - point_1));a = pi * pi * h * w * w / 2 / (point_2 - point_1) / (point_2 - point_1) * cos(pi * (angel - point_1) / (point_2 - point_1));yalijiao =atan( fabs(pi * h / 2 / (point_2 - point_1) * sin(pi / (point_2 - point_1) * (angel - point_1))) / (s + rb));x = (rb + s) * sin(angel);y = (rb + s) * cos(angel);x_ = pi * h / 2 / (point_2 - point_1) * sin(pi * (angel - point_1) / (point_2 - point_1)) * cos((angel - point_1)) - sin((angel - point_1)) * (rb + s);y_ = pi * h / 2 / (point_2 - point_1) * sin(pi * (angel - point_1) / (point_2 - point_1)) * sin((angel - point_1)) + cos((angel - point_1)) * (rb + s);x__ = pi * pi * h / 2 / (point_2 - point_1) / (point_2 - point_1) * cos(pi * (angel - point_1) / (point_2 - point_1)) * cos((angel - point_1)) - sin((angel - point_1)) * pi * h / 2 / (point_2 - point_1) * sin(pi / (point_2 - point_1) * (angel - point_1)) - cos((angel - point_1)) * (rb+s) - sin((angel - point_1)) * pi * h / 2 / (point_2 - point_1) * sin(pi * (angel - point_1) / (point_2 - point_1));y__ = pi * pi * h / 2 / (point_2 - point_1) / (point_2 - point_1) * cos(pi * (angel - point_1) / (point_2 - point_1)) * sin((angel - point_1)) + cos((angel - point_1)) * pi * h / 2 / (point_2 - point_1) * sin(pi / (point_2 - point_1) * (angel - point_1)) - sin((angel - point_1)) * (rb+s) + cos((angel - point_1)) * pi * h / 2 / (point_2 - point_1) * sin(pi * (angel - point_1) / (point_2 - point_1));r = (pow((x_ * x_ + y_ * y_),3.0 / 2)) / (x__ * y_ + x_ * y__);if(yalijiao_go_max < yalijiao)yalijiao_go_max = yalijiao;if(min_r > fabs(r))min_r = fabs(r);printf("%6.1f%6.1f %6.1f %6.1f %6.1f %6.1f %6.1f \n",angel * 180 / pi,s,v,a,fabs(r),x,y);fprintf(fp,"%6.1f %6.1f %6.1f %6.1f %6.1f %6.1f %6.1f\n",angel * 180 / pi,s,v,a,fabs(r),x,y);}else{s = h / 2 * (1 - cos(pi * (2 * pi - angel) / (2 * pi - point_2)));v = -pi * h * w / 2 / (2 * pi - point_2) * sin(pi / (2 * pi - point_2) * ((2 * pi - angel)));a = pi * pi * h * w * w / 2 / (2 * pi - point_2) / (2 * pi - point_2) * cos(pi *(2 * pi - angel) / (2 * pi - point_2));yalijiao =atan( fabs(pi * h / 2 / (2 * pi - point_2) * sin(pi / (2 * pi - point_2) * ((2 * pi - angel)))) / (s + rb));x = (rb + s) * sin(angel);y = (rb + s) * cos(angel);x_ = pi * h / 2 / point_2 * sin(pi * angel / point_2) * cos(angel) - sin(angel) * (rb + s);y_ = pi * h / 2 / point_2 * sin(pi * angel / point_2) * sin(angel) + cos(angel) * (rb + s);x__ = pi * pi * h / 2 / point_2 / point_2 * cos(pi * angel / point_2) * cos(angel) - sin(angel) * pi * h / 2 / point_2 * sin(pi / point_2 * angel) - cos(angel) * (rb+s) - sin(angel) * pi * h / 2 / point_2 * sin(pi * angel / point_2);y__ = pi * pi * h / 2 / point_2 / point_2 * cos(pi * angel / point_2) * sin(angel) + cos(angel) * pi * h / 2 / point_2 * sin(pi / point_2 * angel) - sin(angel) * (rb+s) + cos(angel) * pi * h / 2 / point_2 * sin(pi * angel / point_2);r = (pow((x_ * x_ + y_ * y_),3.0 / 2)) / (x__ * y_ + x_ * y__);if(yalijiao_back_max < yalijiao)yalijiao_back_max = yalijiao;if(min_r > fabs(r))min_r = fabs(r);printf("%6.1f%6.1f %6.1f %6.1f %6.1f %6.1f %6.1f \n",angel * 180 / pi,s,v,a,fabs(r),x,y);fprintf(fp,"%6.1f %6.1f %6.1f %6.1f %6.1f %6.1f %6.1f\n",angel * 180 / pi,s,v,a,fabs(r),x,y);}angel = angel + step_angel;}printf("推程最大压力角是:%6.1f\n回程最大压力角是:%6.1f\n最小曲率半径是: %8.1f\n",yalijiao_go_max * 180 / pi,yalijiao_back_max * 180 / pi,min_r);fprintf(fp,"推程最大压力角是:%6.1f\n回程最大压力角是:%6.1f\n最小曲率半径是: %8.1f\n",yalijiao_go_max * 180 / pi,yalijiao_back_max * 180 / pi,min_r);printf("基园最小半径为%d\n",rb);fprintf(fp,"基园最小半径为%d\n",rb);fclose(fp);。