KK与接收机连接方式
KK中文说明书_Rev05
KK V5.5 飞控板使用说明书免责申明:KKmulticopter V5.5飞控是一个免费的开源项目,任何版权均归属上述网站所有人所有,由此飞控引发的任何事件与本人无关,特此声明产品特点:1)Holybro所售出的成品控板均采用工厂SMD机器贴片工艺,产品质量可靠2)飞控板在烧写不同固件时,可获得不同飞行模式(单轴,2轴,4轴,6轴等),见下面示意3)本产品采用原装Atmega168PA-AU芯片和MURATA ENC-03RC 陀螺芯片,品质有保证 配置说明:您仅需为KK控板配备一套4通道比例遥控设备即可,硬件配置成本低廉。
但您在使用前必须对航模知识,尤其是直升机类航模的控制足够熟练和了解才能进行。
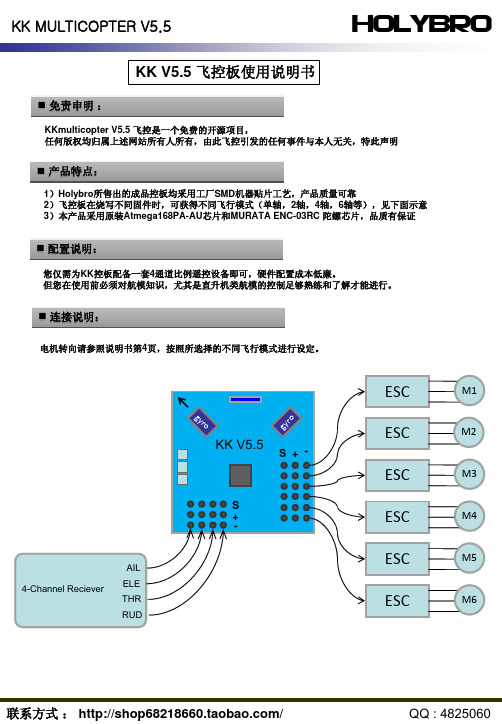
连接说明:电机转向请参照说明书第4页,按照所选择的不同飞行模式进行设定。
调试说明:以下调试说明均以韩版固件为例,德版固件电位器调节方向和韩版相反,如您使用德版固件,请勿参照如下说明。
本产品默认固件是韩版4轴‘十’字模式2.1版,初次飞行前请按如下说明校准1. 设定发射机通道正反向开关通道副翼升降舵油门方向舵JR/SPEKTRUM REVERSE REVERSE NORMAL REVERSE FUTABA NORMAL NORMAL REVERSE NORMALHITEC NORMAL REVERSE NORMAL NORMAL* 注意: 确保关闭发射机上的所有混控功能7. 使用发射机设定飞行模式-如果你的飞控不能顺利解锁,请调低几格发射机油门微调试试-普通模式:50%舵量(出厂默认解锁时为普通模式)-运动模式: 更大的舵量发应,70%舵量.-UFO模式: 更快速的方向旋转。
方向舵量90%,其他舵面50%。
-初学飞行时,建议将副翼和升降舵量设定为50%(D/R值)8. 飞行模式示例(通过刷写不同固件实现,一次刷写只能使用一种模式)。
KK飞控板安装说明

接收机与飞控之间的连接方式将飞控板上的4个通道输入插座连接至接收机,各个通道按照如下顺序对应:AIL——副翼ELE——升降舵THR——油门RUDD——方向舵◆感度调整旋钮飞控板带有3个电位器旋钮,根据不同的使用情况有两种功能:·基本设置;开机时如果某个旋钮或者全部旋钮处于最小位置(逆时针方向转到底),则会进入对应的设置项目。
·调整三个轴向陀螺仪的感度;正常使用时,逆时针方向旋转为减小感度,顺时针方向旋转为增大感度,如下图所示:左边的旋钮位置表示方向舵(YAW)感度为最小,中间的旋钮位置表示升降舵(PITCH)感度为50%,右边的旋钮位置表示副翼(ROLL)感度为最大。
每次连接新的遥控设备或者电调来使用时,都需要对飞控板做一次基本设置。
基本设置主要包含以下步骤1~4:1.设置遥控器通道的正反向;2.通道中立点校准;3.设置陀螺仪修正方向;4.油门行程校准;5.清除所有设置参数(通常无需使用此功能);6.调整陀螺仪感度;7.用遥控器设置启动模式。
1.设置遥控器通道的正反向。
CHANNEL Aileron Elevator Throttle RudderJR/SPEKTRUM REVERSE REVERSE NORMAL REVERSEFUTABA NORMAL NORMAL REVERSE NORMALHITEC NORMAL REVERSE NORMAL NORMALOthers请在遥控器上新建一组模型数据(如果遥控器有此功能的话),或者清除所有遥控器设置参数后再设置通道正反向,然后按照上表中的正反参数来调整您的遥控器,如果您的遥控器品牌不在上述表格中,那就需要通过自行测试来确定每个通道的正反状态。
请注意不要打开遥控器的任何混控功能,否则会导致输入飞控的信号不正确。
连接好所有设备后,即可开始进行如下设置。
请在确保所有设置完成前先不要安装螺旋桨,避免受伤!2.通道中立点校准。
中立点校准指的是让飞控的3个通道(除油门外)认准对应遥控器通道的中立点信号,避免因遥控器本身信号的误差导致飞行出现误动作。
上银KK模组马达座与马达连接

P.C.D. 46
P.C.D. 46
45° 45°
45° 45°
4-M4x0.7Px8 DP P.C.D. 46 62
62
62
62
63 63 63 30.5 30.530.5
0.5 0.5 0.5
0.5 0.5Ø46 0.5Ø460.Ø546
Ø330.05++00.60533Ø0.350++600Ø.03350++300.00.55
45°
Ø17 Ø20++00.03
26 45°
6.75
2.75
25
4-Ø3.5 THRU,Ø6x3.5 DP P.C.D. 28
馬達連接法蘭 F3
44
6
30
11.5
25
2
30
10
23
45°
KK40
Ø17 Ø22++00.03
28
45°
馬達座 F0
5 DP 33
4-3 THRU,Ø5x3 DP
23
+0.03 0
8 8
8
2888 23 1851
8
28 18
28
18
63 30.5
63
62
62
62
4-M4x0.7Px8 DP
P.C.D. 46 4-M4x0.7Px8
4-M4x0.7Px8 DP4P.-CM.4Dx.04.76Px8
DP DP
P.C.D. 46 P.C.D. 46
45° 45°
4-M4x0.7Px8 DP4-M4x0.7Px8 DP
Ø
Ø20
馬達連接法蘭 F1
无人机装调检修工作流程6.22

无人机装调检修工作流程1.无人机的组装(以F450轴距机架为例)1.1机架组装对称电机轴距一般在210mm-1380mm 之间最为常用,不同用途的飞机有不同的轴距。
单独安装机架时比较简单,仅仅是不停地拧螺丝。
但还是要注意托架较为脆弱,安装时不要损坏了托架。
机架的安装步骤如下所述。
(1)将4个悬臂与一个托架固定。
托架需要在悬臂之上,安装时只需要将托架的4个孔对准悬臂的4个孔,然后拧上螺丝。
安装时按照对角线的分布安装,若需要拿放,需要用双手分别抓握两个悬臂。
(2)电池托架安装。
安装电池托架时应该将安装好的机架翻过来,让悬臂上的“脚”朝上。
固定电池托架的螺丝共有8个,每个悬臂上需要两个来固定电池托架。
安装时需要先将电池托架平放在机架上,并将电池托架上对应的螺丝孔与其对齐,分别将4个悬臂的螺丝安装并固定好后就完成安装了。
到此,整个机架的安装就完成了。
1.2机架组装完成后应该考虑的问题(1)飞控安装的位置(可以同时考虑飞控的方向的朝向),以飞控为中心考虑其他部件的安装。
(2)电调安放的位置和电调的电源线和信号线的走线方式。
(3)电机的安装位置。
此时要注意机架上固定电机的螺孔及螺丝是否符合规定。
同时,还要注意电机安装桨后,两桨是否会有交叉。
(4)其他设备的安装。
例如,安装接收器或GPS 时需要考察是否有安装这些部件的位置,应既不影响原本走线方式,也不会妨碍桨的旋转,同时不受其他部件的电磁干扰。
1.3旋翼无人机整体组装前的准备1.3.1整体电路接线要求4旋翼无人机整体电路接线的要求如图1.3所示。
(1)4个电调的正负极需要并联(红色连起,黑色连一起),并接到电池的正负极上。
(2)电调三根黑色的电机控制线,连接电机。
(3)电调有个BEC 输出,用于输出5V 的电压,给飞行控制板供电,并接收飞行控制板的控制信号。
(4)遥控接收器连接在自动驾驶仪上,输出遥控信号,并同时从飞行控制板上得到5V 供电。
图1.3遥控接收机飞控板电调4电机3电调3电池电机4电调2电机1电调1电机2电调BEC 输电调BEC 输1.4线路的焊接1.4.1香蕉头的焊接刚买回来的部件中的线头没有经过处理,只是一些裸露的线头。
KK飞控板安装说明

接收机与飞控之间的连接方式将飞控板上的4个通道输入插座连接至接收机,各个通道按照如下顺序对应:AIL——副翼ELE——升降舵THR——油门RUDD——方向舵◆感度调整旋钮飞控板带有3个电位器旋钮,根据不同的使用情况有两种功能:·基本设置;开机时如果某个旋钮或者全部旋钮处于最小位置(逆时针方向转到底),则会进入对应的设置项目。
·调整三个轴向陀螺仪的感度;正常使用时,逆时针方向旋转为减小感度,顺时针方向旋转为增大感度,如下图所示:左边的旋钮位置表示方向舵(YAW)感度为最小,中间的旋钮位置表示升降舵(PITCH)感度为50%,右边的旋钮位置表示副翼(ROLL)感度为最大。
每次连接新的遥控设备或者电调来使用时,都需要对飞控板做一次基本设置。
基本设置主要包含以下步骤1~4:1.设置遥控器通道的正反向;2.通道中立点校准;3.设置陀螺仪修正方向;4.油门行程校准;5.清除所有设置参数(通常无需使用此功能);6.调整陀螺仪感度;7.用遥控器设置启动模式。
1.CHANNEL Aileron Elevator Throttle RudderJR/SPEKTRUM REVERSE REVERSE NORMAL REVERSEFUTABA NORMAL NORMAL REVERSE NORMALHITEC NORMAL REVERSE NORMAL NORMALOthers请在遥控器上新建一组模型数据(如果遥控器有此功能的话),或者清除所有遥控器设置参数后再设置通道正反向,然后按照上表中的正反参数来调整您的遥控器,如果您的遥控器品牌不在上述表格中,那就需要通过自行测试来确定每个通道的正反状态。
请注意不要打开遥控器的任何混控功能,否则会导致输入飞控的信号不正确。
连接好所有设备后,即可开始进行如下设置。
请在确保所有设置完成前先不要安装螺旋桨,避免受伤!2.通道中立点校准。
中立点校准指的是让飞控的3个通道(除油门外)认准对应遥控器通道的中立点信号,避免因遥控器本身信号的误差导致飞行出现误动作。
ONKYO AV 接收机 TX-NR509 说明书

连接 AV 接收机.......................................................................................11 连接扬声器................................................................... 11 关于 AV 连接................................................................ 14 将设备与 HDMI 连接..................................................... 15 连接您的设备 ............................................................... 16 连接 Onkyo V 设备..................................................... 17 连接录制设备 ............................................................... 17 正在连接天线 ............................................................... 18 连接电源线................................................................... 18
Cs
前言
警告:
为减少火灾Leabharlann 电击的危险,不要将设备暴露在雨 中或潮湿的环境中。
注意:
为减少电击的危险,不要取下设备的外壳(或后 盖)。内部没有用户可用的组件。请向合格的技 术服务人员谘询,并寻求帮助。
华星RTK作说明书
录目第一章华星RTK GPS系统概述 (3)§1.1 华星RTK GPS系统创新技术 (3)§1.2 技术参数与性能特点 (4)§1.3数据传输模式 (6)§1.4基准站示意图 (8)§1.5移动站示意图 (10)第二章接收机设置 (13)§2.1工作模式 (13)§2.2 控制面板说明 (13)第三章数据链电台 (16)第四章电源 (26)§4.1 电池充电 (26)§4.2 锂电池安装与拆卸方法 (26)第五章内置GPRS模块 (29)§5.1安装SIM卡 (30)§5.2拆卸SIM卡 (30)第六章静态测量数据下载 (31)§6.1数据下载 (31)§6.2接收机管理软件 (32)第七章作业模式 (34)§7.1使用URS电台作业 (34)§7.2使用内置GPRS数据链作业 (35)§7.3 水上测量 (36)§7.4 双频静态测量 (37)第八章注意事项 (39)1+第九章华星GIS数据采集器 (40)§9.1认识华星GIS+数据采集器 (40)§9.2如何取出和安装电池 (42)§9.3如何取出和放入触摸笔 (43)§9.4如何开机 (44)§9.5如何获取数据到电脑 (44)§9.6如何安装和取出MicroSD卡 (47)2第一章华星RTK GPS系统概述华星RTK GPS是广州华星定位技术有限公司创新推出全新一代基于CORS技术的RTK系统。
系统采用超长距离RTK技术,第三代GPS卫星L5信号接收技术。
系统引入语音智能技术实现―语音导航操作‖,对仪器主机操作全过程语音提示;融入U盘式文件管理技术,拖拽式文件下载;一体化全内置加固机身,军标三防设计,更适应野外环境的细节考虑;成熟的GSM/CDMA网络传输技术,GSM/CDMA/UHF轻松一键切换。
KK多旋翼飞行控制板的调试安装
KK多旋翼飞行控制板的调试安装AIL是 翻滚/横滚/副翼ELE 是 升降/俯仰THR 是 油门RUDD 是自旋/偏航/方向飞行前的检查和调整:1.发射机油门调整1.)打开发射机和飞控电源2.)在三轴模式和四轴模式的固件中,需要解锁后才能控制飞控板!解锁步骤如下(1)遥控器油门最低,开关打开;飞控板通电,板上的LED灯闪一下熄灭,这样说明飞控板工作正常(2)日本手(右手油门)解锁:油门保持最低,把方向摇杆向右打到底,停2秒,板上的LED灯常亮,表示顺利解锁飞控板。
如果方向摇杆设置反向,则向左打到底试试(3)美国手(左手油门)解锁:油门保持最低,把方向摇杆向右下打到底,停2秒,板上的LED灯常亮,表示顺利解锁飞控板。
如果方向摇杆设置反向,则向左下打到底试试)3.)如果无法完成解锁,请将油门通道的微调往下调一点再重复解锁步骤 2.设置发射机ATV/舵机信号行程范围(实际上就是调整发射机各个通道遥控信号的脉宽)Pitch/Elevator(俯仰):50%Roll/Aileron(横滚): 50%Yaw(rudder): 100%初始化的陀螺仪感度(增益gain)是50%,增大感度会造成四轴快速振荡,快速飞行需要减小陀螺仪的感度,但过低的感度也会造成操控困难或者四轴翻倒 3.电调油门行程/范围设置(千万不能装桨,以免发生意外)1.) 将飞控板电源断开,把YAW电位器旋转到底(德版固件及韩版2.5(包含2.0、2.1、2.2、2.3、2.4)版本固件逆时针拧,韩版1.5、1.6、1.7固件顺时针拧)2.)打开发射机电源3.)发射机油门手柄推到最大(满油门)4.)打开飞控板电源5.)德版固件:飞控板LED灯会快速闪动数下后熄灭。
约2秒后,听到电机发出滴滴两声后不再发声。
韩版固件:接通飞控板电源后LED灯会快速闪动数下后熄灭,隔一会儿LED会再次快速闪动数下后熄灭。
6.)这时快速把油门拉到最低,电调会发出哔哔声来回应。
“KK”飞控板系列飞行器的制作
“KK”飞控板系列飞行器的制作作者:一也来源:《航空模型》2011年第09期“KK”飞控板是一款开源的飞行控制模块,其对硬件要求低、价格相对便宜,虽然功能有限,却受到越来越多模友的关注。
笔者此前曾以“MK”飞控板为控制单元制作过一款四轴飞行器(参阅《航空模型》2010年第9期《一款四轴飞行器的制作》一文),看到最近网上流行采用“KK”飞控板的四轴飞行器,于是也决定用它制作一组。
掌握了“KK”飞控板的功能后,笔者将它与以前使用的“MK”飞控板做了比较。
由于“MK”飞控板用加速度计和陀螺仪测量四轴飞行器的姿态,而“KK”飞控板只用陀螺仪进行姿态增稳,因此前者在飞行控制上更加稳定;在硬件支持上,“KK”飞控板要求更低,以电调为例,“MK”飞控板只支持IIC数字接口的专用高速电调,“KK”飞控板则能支持市面上常用的普通电调。
与“MK”飞控板相比,“KK”飞控板的主要优点有:1.价格低廉,结构简单,维修、调试容易;2.飞控板载3个陀螺,可用电位器调整陀螺感度;3.全舵机信号输出,支持普通商品电调与模拟舵机;4.通过不同的结构布局与相应的调试程序,能支持三轴、四轴、六轴等多种飞行模式(其中,四轴有“+”和“×”等飞行模式,六轴有“Hex6”和“Y6”等飞行模式,图1~图5);5.可与接收机直接连接,而不用像“MK”飞控板那样另配PPM解码板;6.以其为控制单元制作的飞行器,其操控方式类似单旋翼模型直升机,主要依靠手工操控,飞行器可做空翻、“刷锅”等特技动作。
下面为大家介绍笔者以“KK”飞控板为控制单元制作的三轴与四轴飞行器,以三轴飞行器的制作与调试为主。
一、制作机架两款飞行器的机架都设计成可折叠式,便于携带。
机架的主要零件以市面上常用的一些材料为主,购买容易、价格低廉、加工方便。
四轴飞行器为“×”结构布局,使用4个无刷电机和4个电调。
具体制作过程如图6~图12所示。
三轴飞行器机架的制作与四轴飞行器基本类似,唯一不同的是:因三轴飞行器为“Y”形结构(图13、图14),其控制方式与四轴飞行器有所区别。