FANUC常见伺服报警及解决方法
FANUC常见伺服报警以及解决方法

FANUC常见伺服报警以及解决方法SV0401:伺服准备就绪信号断开报警原因:伺服放大器伺服准备就绪信号(VRDY)尚未被置于ON 时,或在运行过程中被置于 OFF 时发生此报警。
解决方案:1)排查诊断号358;例如:诊断358=1441,转换为二进制为10110100001,从第5位开始排查,第6位为0,确认首先应排查急停相关接线等。
2)伺服放大器或者轴卡硬件损坏,更换硬件。
2SV0403 硬件/软件不匹配报警原因:轴卡与伺服软件组合不正确,可能的原因有:1)没有提供正确的轴卡;2)闪存中没有安装正确的伺服软件。
解决方法:软件或硬件异常,请直接联系北京发那科维修部门。
3SV404 伺服准备就绪信号接通报警原因:伺服放大器的伺服准备就绪信号(VRDY)一直为 ON 时发生此报警。
解决方法:1)某些特殊情况可以使用参数P1800#1=1进行屏蔽;2)因放大器或者轴卡损坏引起,更换放大器与轴卡。
4SV0409 检查的扭矩异常报警原因:系统开启异常扭矩负载功能之后,检测到异常负载导致。
解决方法:1)如果不适用异常负载检测,请设定参数P2016#0=0;2)如果使用异常负载检测功能,请确认是否存在异常负载现象,例如机械异常卡住,或者异常加工状态;3)如果使用异常负载检测功能,同时加工状态正常,请重新调整该功能的相关参数。
5SV0410 停止时误差过大报警原因:伺服轴停止时误差过大引起报警。
解决方法:1)排查动力线、反馈线是否接错;2)排查伺服电机初始化参数是否有误;3)正确设定不同状态下伺服轴停止时误差报警水平参数P1829、P5312等;4)如果伺服电机使用过程中出现抖动等现象,请先排查抖动问题,SV0410为附加报警;5)Cs轴控制时出现此问题,请检查主轴编码器相关参数。
6SV0411 运动时误差过大报警原因:伺服轴运动时误差过大引起报警解决方法:1)排查动力线、反馈线是否接错;2)排查伺服电机初始化参数是否有误;3)正确设定不同状态下伺服轴停止时误差报警水平参数P1828、P5310等;4)如果伺服电机使用过程中出现抖动等现象,请先排查抖动问题,SV0410为附加报警;5)Cs轴控制时出现此问题,请检查主轴编码器相关参数。
FANUC伺服报警与故障处理
Pulse error (separate)
分离型编码器脉冲错误
3.3.7(2)
384
Soft phase alarm (separate)
相位错误
3.3.7(2)
385
Serial data error (separate)
分离型编码器串行数据错误
3.3.7(3)
386
Data transfer error (separate)
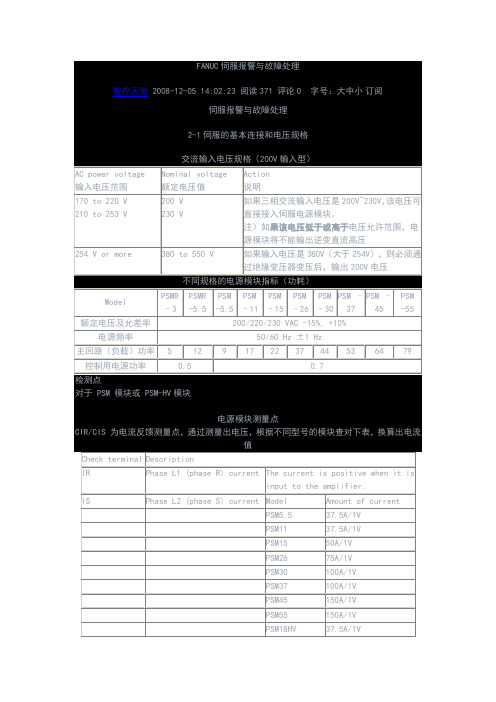
200 V
230 V
如果三相交流输入电压是200V~230V,该电压可直接接入伺服电源模块。
注)如果该电压低于或高于电压允许范围,电源模块将不能输出逆变直流高压
254 V or more
380 to 550 V
如果输入电压是380V(大于254V),则必须通过绝缘变压器变压后,输出200V电压
不同规格的电源模块指标(功耗)
驱动器 控制电压欠电压
3.2
435
5
Inverter: DC link undervoltage
驱动器直流环欠电压
3.2
436
Soft thermal (OVC)
软过热(过电流)
3.3.3
437
01
Converter: input circuit overcurrent
逆变器输入回路过电流
3.1
438
53
64
79
控制用电源功率
0.5
0.7
检测点
对于 PSM 模块或 PSM-HV模块
电源模块测量点
CIR/CIS 为电流反馈测量点,通过测量出电压,根据不同型号的模块查对下表,换算出电流值
Check terminal
FANUC常见报警说明与解决方法

FANUC常见报警说明与解决⽅法提⽰以0i-F系统为例01APC闪烁报警机床长时间停机,开机后系统屏幕上可能会出现APC闪烁,当出现这个报警的时候,表⽰伺服放⼤器的电池电压低,正常电压⼀般为6V,该电池⽤于记住机床的伺服绝对位置。
建议检查各个伺服放⼤器的电池电压,更换后即可正常。
【解决⽅法】更换放⼤器电池【解决⽅法】放⼤器电池更换⽅法,请参考下⽅视频:02BAT闪烁报警机床长时间停机,开机后系统屏幕上可能会出现BAT闪烁,当出现这个报警的时候,表⽰CNC的系统电池电压低,正常电压⼀般为3.3V,该电池⽤于保存CNC中的SRAM数据(包含CNC参数,PMC参数,加⼯程序等)。
建议⽴即更换CNC系统上的电池,以免造成数据丢失。
【解决⽅法】更换CNC系统电池【解决⽅法】CNC系统电池更换⽅法,请参考下⽅视频:03SYS_ALM500报警机床长时间停机,开机后系统屏幕上可能会出现SYS_ALM500报警(0i-C系统为935报警)SYS_ALM500 SRAM DATA ERROR(SRAM MOUDLE)当出现这个报警的时候,表⽰由于CNC的系统电池电压低,导致CNC的SRAM数据(包含CNC参数,PMC参数,加⼯程序等)已经丢失。
【解决⽅法】【解决⽅法】更换CNC系统电池,并恢复出⼚参数。
04FAN报警机床长时间停机,开机后系统屏幕上可能会出现FAN报警,当出现这个报警的时候,表⽰CNC系统风扇转速低或者停转。
建议⽴即更换CNC系统风扇,以免因CNC过热导致更⼤故障。
【解决⽅法】更换CNC系统风扇【解决⽅法】请认准F+商城,点击直达系统风扇页⾯【购买链接】请认准CNC系统风扇更换⽅法,请参考下⽅视频:05放⼤器风扇报警由于FANUC产品中配备风扇的部件较多,每个部件的风扇报警号也各有不同,为了⽅便快速发现故障点,请参考放⼤器风扇报警号以及对应的位置关系表(以0i-F系统为例),确认故障风扇。
【解决⽅法】⾸先清洁风扇接⼝,重新插拔风扇后再测试。
FANUC-机器人常用故障代码和故障排除方法

常用故障代码和故障排除方法伺服 - 001操作面板紧急停止SRVO- 001 Operator panel E-stop[现象]按下了操作箱/操作面板的紧急停止按扭。
SYST-067面板HSSB断线报警同时发生,或者配电盘上的LED(绿色)熄灭时,主板(JRS11)-配电盘(JRS11)之间的通信有异常,可能是因为电缆不良、配电盘不良、或主板不良。
(注释)[对策1]解除操作箱/操作面板的紧急停止按扭。
[对策2]确认面板开关板(CRM51)和紧急停止按扭之间的电缆是否断线,如果断线,则更换电缆。
[对策3]如果在紧急停止解除状态下触点没有接好,则是紧急停止按扭的故障。
逐一更换开关单元或操作面板。
[对策4]更换配电盘。
[对策5]更换连接配电盘(JRS11)和主板(JRS11)的电缆。
在采取对策6之前,完成控制单元的所有程序和设定内容的备份。
[对策6]更换配电盘。
(注释)SYST-067面板HSSB断线报警同时发生,或RDY LED熄灭时,有时会导致下面的报警等同时发生。
(参阅示教操作盘的报警历史画面)伺服-001操作面板紧急停止伺服-004栅栏打开サーボ-007外部紧急停止伺服-204外部(SVEMG异常)紧急停止伺服-213保险丝熔断(面板PCB)伺服-280SVOFF输入伺服 - 002示教操作盘紧急停止SRVO- 002 Teach pendant E-stop[现象]按下了示教操作盘的紧急停止按扭。
[对策1]解除示教操作盘的紧急停止按扭。
[对策2]更换示教操作盘。
伺服 - 003紧急时自动停机开关SRVO- 003 Deadman switch released[现象]在示教操作盘有效的状态下,尚未按下紧急时自动停机开关。
[对策1]按下紧急时自动停机开关并使机器人操作。
[对策2]更换示教操作盘。
伺服 - 021SRDY断开(组:i轴:j)SRVO- 021 SRDY off (Group:i Axis:j)[现象]当HRDY断开时,虽然没有其他发生报警的原因,SRDY处在断开状态。
发那科系统195报警大全

发那科系统195报警大全发那科系统195报警大全发那科系统195是一种常用的工业控制系统,广泛应用于机械加工和自动化生产行业。
然而,由于各种原因,该系统在使用过程中可能会出现不同的故障和报警。
下面是一些常见的发那科系统195报警,以及可能的解决方法。
1. ALARM 100 - 通讯错误: 这个报警表明系统与外部设备之间的通讯出现了问题。
解决方法包括检查通讯线路是否连接正确,检查设备是否设置正确的通讯参数,以及检查设备是否具有正常的供电。
2. ALARM 101 - 位置错误: 这个报警表示系统检测到位置错误。
可能的原因包括轴的位置传感器故障、轴伺服系统故障或者机械零件损坏。
解决方法包括检查传感器连接是否良好,检查轴伺服系统的运行情况,并检查机械零件是否正常。
3. ALARM 200 - 电机过载: 这个报警表示电机负载超过了额定值。
可能的原因包括工作负载过大,电机故障或者电源供应不稳定。
解决方法包括减少工作负载,检查电机是否正常运行,并确保电源供应稳定。
4. ALARM 201 - 伺服驱动错误: 这个报警表示伺服驱动出现故障。
可能的原因包括驱动器过载,驱动器设置错误或者电源故障。
解决方法包括检查驱动器的连接和设置,确保驱动器没有超载,并检查电源是否正常。
5. ALARM 300 - 冷却液温度过高: 这个报警表示系统检测到冷却液温度超过了安全范围。
可能的原因包括冷却系统故障,冷却液循环不良或者温度传感器故障。
解决方法包括检查冷却系统的管道和泵是否正常运行,确保冷却液循环畅通,并检查温度传感器是否正常。
这只是发那科系统195报警中的一小部分,实际上还有很多其他可能的故障和报警。
对于这些问题,建议用户在遇到报警时及时与技术支持人员联系,以获取更详细的解决方案。
此外,及时的维护和保养也是预防故障和减少报警的重要措施。
fanuc伺服报警的故障诊断及实际处理方法

JV1B/JV2B
14 15 B
JS1B/JS2B
16 17 B
JF1/JF2
长春汽车工业高等专科学校
FANUC α
(4 )
长春汽车工业高等专科学校
FANUC α
(4 )
长春汽车工业高等专科学校
2.FANUC
CX4
相荡度滚 相荡影滚 溢 相而度滚 相而影滚 滚
相环度 相环影 滚
控荡 立点点
长春汽车工业高等专科学校
SSCK—20
长春汽车工业高等专科学校
2.FANUC βi
长春汽车工业高等专科学校
βi
Oi MateTB
长春汽车工业高等专科学校
VOFS(#7):
0:
1:
2077:0—32767 32000
10 10
长春汽车工业高等专科学校
ALM1
#7 OVL #6 LV #5 OVC #4 HCA #3 HVA #2 DCA #1 FBA #0 OFA
:
FANUC-OiA/OiB/OiC
:
长春汽车工业高等专科学校
长春汽车工业高等专科学校
长春汽车工业高等专科学校
3.
长春汽车工业高等专科学校
FANUC
长春汽车工业高等专科学校
3
3.1 FANUC
度实
度
长春汽车工业高等专科学校
影
: 1μm 0.5μm 0.1μm
长春汽车工业高等专科学校
2.FANUC
α
SVU
β
βi
α
SVM
FANUC伺服报警SV~SV

精心整理
FANUC 伺服报警SV0401~SV0411(一)
SV0401伺服准备就绪信号断开报警原因:伺服放大器伺服准备就绪信号(VRDY)尚未被置于ON 时,或在运行过程中被置于OFF 时发生此报警。
相关链接:FANUCSV0401报警诊断方法及案例介绍
数停1)3)正确设定不同状态下伺服轴停止时误差报警水平参数P1829、P5312等;4)如果伺服电机使用过程中出现抖动等现象,请先排查抖动问题,SV0410为附加报警;5)Cs 轴控制时出现此问题,请检查主轴编码器相关参数。
SV0411运动时误差过大报警原因:伺服轴运动时误差过大引起报警解决方法:1)排查动力线、反馈线是否接错;2)排查伺服电机初始化参数是
精心整理
否有误;3)正确设定不同状态下伺服轴停止时误差报警水平参数P1828、P5310等;4)如果伺服电机使用过程中出现抖动等现象,请先排查抖动问题,SV0410为附加报警;5)Cs轴控制时出现此问题,请检查主轴编码器相关参数。
数控笔记。
FANUC系统常见报警中文对照及解决方法
FANUC系统常见报警中文对照及解决方法1.AL-01:伺服报警尘埃这个报警表示伺服电机遇到了尘埃问题。
解决方法是清洁伺服电机,并确保其周围环境清洁。
2.AL-02:伺服报警过载这个报警表示伺服电机遇到过载问题。
解决方法是检查伺服电机和相关设备的负载情况,确保其在正常范围内。
3.AL-03:伺服报警过温这个报警表示伺服电机遇到过温问题。
解决方法是检查散热装置是否正常工作,安装风扇或增加散热片等,并减少伺服电机的负载。
4.AL-04:伺服报警驱动断开这个报警表示伺服电机的驱动断开。
解决方法是检查伺服电机的连接线路是否正常,确保电缆连接牢固。
5.AL-05:伺服报警电源断开这个报警表示伺服电机的电源断开。
解决方法是检查伺服电机的电源线路是否正常,确保电源连接牢固。
6.AL-06:伺服报警过流这个报警表示伺服电机遇到过流问题。
解决方法是检查伺服电机和相关设备的电流情况,确保其在正常范围内。
7.AL-07:伺服报警过压这个报警表示伺服电机遇到过压问题。
解决方法是检查伺服电机和相关设备的电压情况,确保其在正常范围内。
8.AL-08:伺服报警欠压这个报警表示伺服电机遇到欠压问题。
解决方法是检查伺服电机和相关设备的电压情况,确保其在正常范围内。
9.AL-09:伺服报警过热这个报警表示伺服电机遇到过热问题。
解决方法是检查散热装置是否正常工作,安装风扇或增加散热片等,并减少伺服电机的负载。
10.AL-10:伺服报警驱动电流异常这个报警表示伺服电机驱动电流异常。
解决方法是检查伺服电机的驱动器和电缆连接是否正常,并确保电缆连接牢固。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
FANUC常见伺服报警及解决方法
SV0301:APC报警:通信错误
1、检查反馈线,是否存在接触不良情况。
更换反馈线;
2、检查伺服驱动器控制侧板,更换控制侧板;
3、更换脉冲编码器。
SV0306:APC报警:溢出报警
1、确认参数No.2084、No.2085是否正常;
2、更换脉冲编码器。
SV0307:APC报警:轴移动超差报警
1、检查反馈线是否正常;
2、更换反馈线。
SV0360:脉冲编码器代码检查和错误(内装)
1、检查脉冲编码器是否正常;
2、更换脉冲编码器。
SV0364:软相位报警(内装)
1、检查脉冲编码器是否正常;
2、更换脉冲编码器。
3、检查是否有干扰,确认反馈线屏蔽是否良好。
SV0366:脉冲丢失(内装)报警
1、检查反馈线屏蔽是否良好,是否有干扰;
2、更换脉冲编码器。
SV0367:计数丢失(内装)报警
1、检查反馈线屏蔽是否良好,是否有干扰;
3、更换脉冲编码器。
SV0368:串行数据错误(内装)报警
1、检查反馈线屏蔽是否良好;
2、更换反馈线;
3、更换脉冲编码器。
SV0369:串行数据传送错误(内装)报警
1、检查反馈线屏蔽是否良好,是否有干扰源;
2、更换反馈线;
3、更换脉冲编码器。
SV0380:分离型检查器LED异常(外置)报警
1、检查分离型接口单元SDU是否正常上电;
2、更换分离型接口单元SDU。
SV0385:串行数据错误(外置)报警
1、检查分离型接口单元SDU是否正常;
2、检查光栅至SDU之间的反馈线;
3、检查光栅尺。
SV0386:数据传送错误(外置)
1、检查分离型接口单元SDU是否正常;
2、检查光栅至SDU之间的反馈线;
3、检查光栅尺。
SV0401:伺服准备就绪信号断开
1、查看诊断No.358,根据No.358的内容转换成二进制数值,进一步确认401报警的故障点。
2、检查MCC回路;
3、检查EMG急停回路;
4、检查驱动器之间的信号电缆接插是否正常;
5、更电源单元。
同步控制中SV0407:误差过大报警
1、检查同步控制位置偏差值;
2、检查同步控制是否正常。
移动轴时SV0409报警
1、检查移动时该轴的负载情况;
2、确认机械是否卡死;
3、确认伺服参数设定是否正常;
4、更换伺服电机;
5、更换伺服驱动器。
SV0410:停止时误差过大报警
1、检查机械是否卡死;
2、对于重力轴,抱闸的24VDC供电是否正常,检查抱闸是否正常松开;
3、脱开丝杆等相关机械部分的连接,单独驱动电机,若正常,找MTB检查机械部分;若故障依旧,更换电机或伺服驱动器。
SV0411:移动时误差过大报警
1、查看负载情况,若负载过大。
2、检查机械是否卡死;
3、对于重力轴,抱闸的24VDC供电是否正常,检查抱闸是否正常松开;
4、脱开丝杆等相关机械部分的连接,单独驱动电机,若正常,找MTB检查机械部分;若故障依旧,伺服驱动器。
SV0417:伺服非法DGTL参数报警
1、检查数字伺服参数设定是否正确;
2、查看诊断No.0203#4的值,当No.0203#4=1时,通过No.0352的值进一步判断故障点;当No.0203#4=0时,通过No.0280的值进一步判断具体故障。
SV0421:超差(半闭环)
1、查看半闭环和全闭环的位置反馈误差,对比参数No.2118设定值是否正常;
2、分别检查半闭环和全闭环位置反馈误差是否正常。
3、检查或屏蔽光栅尺;
SV0430:伺服电机过热报警
1、故障时检查诊断No.308伺服电机温度值,并对比电机实际温度。
若显示值过热,而电机实际温度正常。
更换电机;
2、检查电机负载是否过大,查看电机与丝杆连接部件是否过紧,或卡死。
若机械方面正常,更换电机。
SV0432:变频器控制电压低报警
1、检查外部输入控制电压电压是否正常,包括变压器,电磁接触器等;
2、更换电源单元。
偶尔SV0433:变频器DC链路电压低报警
1、检查外围线路是否正常;
2、确认机床振动是否过大,保证伺服驱动器在使用过程中不受振动影响。
3、更换电源单元。
偶尔SV0434:逆变器控制电压低报警
1、检查输入电源电源是否正常,电压是否稳定,功率是否足够;
偶尔SV0435:逆变器DC链路电压低报警
1、确认DC LINK母线接线端子螺丝是否锁紧;
2、如果发生全轴或多轴报警时,请参考PSM:04报警方法排查故障;
3、若报警发生在单轴时,请更换该轴驱动器控制侧板或驱动器。
SV0436:软过热报警
1、查看电机负载是否过大;
2、若是重力轴,请确认抱闸24VDC是否正常,抱闸是否正常打开。
3、脱械部分,盘动电机轴是否卡死,若卡死或试机故障依旧,请更换电机;若不卡死,试机正常,请联系机床厂家检查机械部分。
SV0438:逆变器电流异常报警
1、检查动力线是否有破损、对地短路,更换动力线;
2、测量电机三相对地是否绝缘,否,则更换电机;
3、更换伺服驱动器。
SV0439:DC链路电压过高报警
1、检查外部输入电压是否稳定;
2、更换电源单元;
3、更换对应的伺服驱动器。
SV0441:异常电流偏移报警
1、检查电机动力线是正常;
2、更换伺服驱动器
SV0442:DC链路充电异常报警
1、检查PSM进线与CX48端子相序是否一致;
2、检查三相电压是否平衡;
3、检查MCC回路是否正常;
4、更换电源单元。
SV0443:变频器冷却风扇停止报警
1、检测电源单元侧板的风扇是否正常;
2、更换电源单元侧板或电源单元。
SV0444:逆变器内部冷却风扇停止报警
1、检测伺服驱动器上方的散热风扇是否正常,更换散热风扇;
2、若更换风扇无效,请更换伺服驱动器。
SV0445:软件断线报警(全闭环)
1、检查光栅尺反馈线是否正常;
2、屏蔽光栅尺改全闭环为半闭环试机,若无故障,请联系MTB检查光栅尺;
3、检查工作台丝杆与电机连接是否存在间隙。
SV0449:逆变器IPM报警
1、检查动力线是否正常;
2、从驱动器端脱开电机动力线,上电若还出现该报警,请更换驱动器。
(对于重力轴,请确保重力轴安全的情况下操作。
)
SV0453:脉冲编码器软件断线报警
1、检查反馈线是否正常;
2、在NC电源OFF状态下,拔插反馈线后试机,若再该报警,请更换脉冲编码器。
SV0465:读ID信息失败报警
1、检查驱动器侧板是否插紧,接线是否牢固。
SV0466:电机/放大器组合不对报警
1、检查轴与放大器连接是否正常;
2、检查参数NO.2165设置值是否正确;
3、更换伺服驱动器;
4、若新更换了伺服驱动器出现该报警,请把No.2165值修改为0。
SV0601:散热冷却风扇故障报警
1、检查伺服驱动器散热片上的风扇是否停止旋转,若停止或者转速异常,请更换风扇;
2、若更换风扇无效,请更换伺服驱动器。
SV0602:伺服放大器过热报警
1、检查伺服驱动器所带轴负载是否正常;
2、更换控制侧板或伺服驱动器。
SV0603:逆变器IPM检测到过热报警
1、检查伺服驱动器所带轴负载是否过大;
3、更换伺服驱动器。
SV0604:放大器通讯错误报警
1、检查伺服驱动器之间的信号电缆连接是否正常;
2、更换驱动器控制侧板。
SV0606:外部冷却散热片冷却风扇报警
1、检测电源单元散热片上的风扇是否停止旋转或转速异常,更换风扇;
2、检查控制侧板是否插牢;
3、更换电源单元。
SV0607:主电源缺相报警
1、检查输入电源是否正常,是否缺相;
2、更换PSM单元。
(源于:FANUC发那科数控系统技术)。