KUKA机器人C4外部轴配置
KUKA外部轴配置方法,偷偷分享的
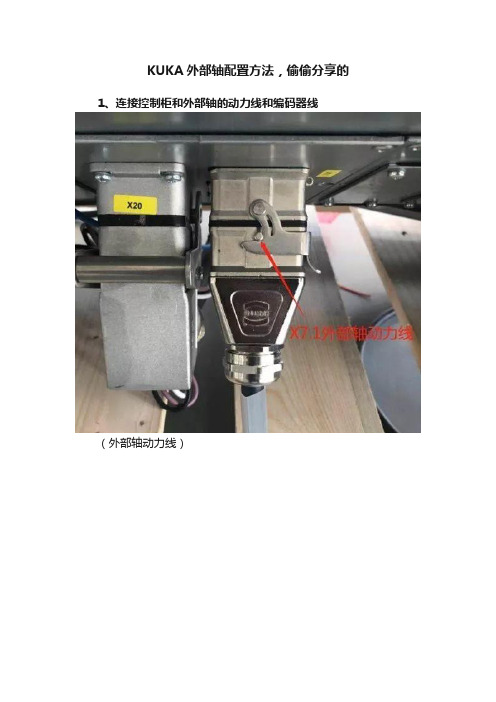
KUKA外部轴配置方法,偷偷分享的1、连接控制柜和外部轴的动力线和编码器线
(外部轴动力线)
(连接机器人底部RDC编码器线)
2、Workvisual外部轴添加与配置
(1)根据机器人控制柜内部实际的KPP和KSP型号添加:(右键控制系统组件添加)
(2)确认电机铭牌上的电机型号:
(开头MG/ME光轴与键槽轴的区别)
(3)根据电机型号添加选项:
(右键设备视图添加电机型号)
(4)在单元配置中将添加的外部轴电机与控制柜连接:(拖住电机连接控制柜)
(5)右键电机--驱动装置配置--(根据实际接线图连接电机):
(外部轴电机连接错误,导入项目提示报警编码器故障):
(6)右键电机--机器参数配置(配置电机需要的参数):
(7)配置完成后,项目编译导入机器人控制柜。
(8)导入项目后进行安全配置:(注意切换安全员用户)
(9)外部轴零点丢失(进行零点校正):
(10)外部轴动作方式的切换:。
KUKA机器人KRC4操作说明书
9 / 181发布日期: 15.02.2011 版本: KSS 8.2 END V1 zh 1 引言1引言1.1目标群体本文献针对具有下列知识的用户:⏹具备有关工业机器人的基本知识1.2工业机器人文献工业机器人文献由以下部分组成:⏹机器人机械装置文献⏹机器人控制器文献⏹库卡系统软件操作及编程指南⏹选项及附件指南⏹保存在数据载体上的部件目录每份指南均独立成篇。
1.3提示的图示安全这些说明是安全提示,必须遵守。
提示这些提示可使工作便利或提供进一步信息的说明。
1.4商标Windows 是微软公司的商标。
WordPad 是微软公司的商标。
我们推荐客户在库卡学院进行培训,以便能以最佳方式使用我们的产品。
有关培训项目信息请访问公司主页 或直接在公司分支机构处获得。
该提示表示,如果不采取预防措施,则将导致死亡或严重的身体伤害。
该提示表示,如果不采取预防措施,则可能导致死亡或严重的身体伤害。
该提示表示,如果不采取预防措施,则可能导致轻微的身体伤害。
该提示表示,如果不采取预防措施,则可能导致财产损失。
该提示包含安全相关信息的说明或通用安全措施。
该提示不针对个别的危险或个别的预防措施。
用来使工作便利或提供进一步说明信息的提示。
全球独家推出 全覆盖型省配线解决方案库卡系统软件 8.210 / 181发布日期: 15.02.2011 版本: KSS 8.2 END V1 zh11 / 181发布日期: 15.02.2011 版本: KSS 8.2 END V1 zh 2 产品说明2产品说明2.1工业机器人概览工业机器人由下列部件构成:⏹机械手⏹机器人控制器⏹手持式编程器⏹连接线缆⏹软件⏹选项,附件2.2软件组成部分概览概览下列软件组成部分被应用:⏹库卡系统软件 8.2⏹Windows XPe V3.0.02.3库卡系统软件概览 (KSS)说明库卡系统软件 (KSS) 承担着工业机器人运行所需的所有基本功能。
⏹轨道设计⏹I/O 管理⏹数据与文件管理⏹等系统中可能还装有其它的工艺数据包,包含与应用程序相关的指令和配置。
kuka机器人外部轴配置步骤
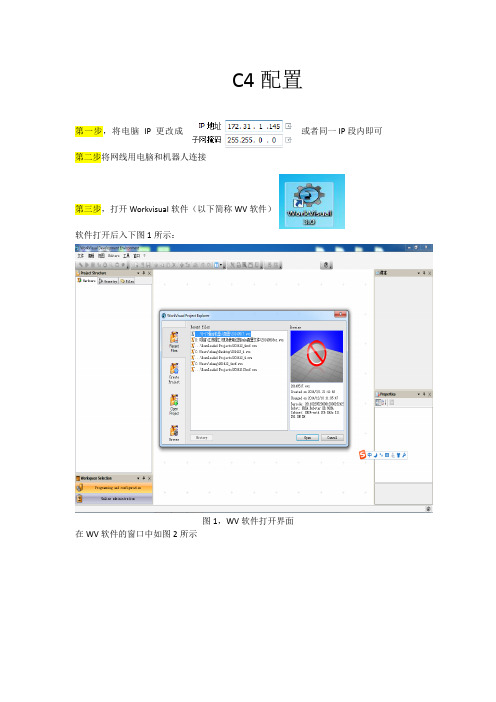
C4配置第一步,将电脑IP更改成或者同一IP段内即可第二步将网线用电脑和机器人连接第三步,打开Workvisual软件(以下简称WV软件)软件打开后入下图1所示:图1,WV软件打开界面在WV软件的窗口中如图2所示以前打开过的文档新建WV文档打开文档浏览在线机器人中的文档图2项目文件选择当选择Browse时,界面如图3所示点击刷新,即可显示,当前连接的机器人图3刷新后显示项目文件,带:绿色箭头”标志的为当前项目。
备注:在打开项目后将当前项目另存为文件,以免将原来的项目覆盖,在出问题时可以用此项目恢复。
打开VW文件后,界面如图4所示图4第四步,拍下外部轴点机的型号,如图5查找点机的Art-Nr 号,对应kuka文件查找电机的型号此处的数字为电机的订货号例如图5中的电机订货号后六位是121216,参考kuka文件中如图6,可查出电机型号为MX_110_130_40_S0图6第五步,现在开始添加外部轴,当kuka机器人有两个外部轴系统时,原则上先添加直线导轨外部系统,再配旋转轴外部系统。
下面配置示例的就是直线导轨外部轴单击geometric view项中右击添加Mx_110_130_40_S0,如图7图7 添加外部轴电机添加完后把KR60HA_3拖到MX_60_110_30_S0的FLANGE BASE下面,如图8电机型号电机订货号单击右下角添加Mx_110_130_40_S0,如图9保存——》设置参数——》保存——》编译,参数设置在如图10中图10参数主要有限位,电机转向,轴的类型,减速比等参数轴类型Linear 直线导轨Rotatory 旋转轴Endless 无限旋转轴电机转向,正负电机负限位电机正限位减速比电机负限位电机正限位注:如果需要做耦合,就必须将坐标转换值输入进去,数值由实际测量得出坐标转换值旋转轴配置和上面步骤相同,除了这步:添加完后把KR60HA_3拖到MX_60_110_30_S0的FLANGE BASE下面,如图8,这步配置旋转轴时不需要执行:文件/名录管理,把所有的文件移至右边。
KUKA焊接机器人常用配置

多种标准变位机
Page No. • Department/Producer • Date
MEMBER OF THE KUKA SCHWEISSANLAGEN GROUP
KUKA Automation Equipment Co. Ltd.
GETTING CONCEPTS ON THE ROAD
GETTING CONCEPTS ON THE ROAD
KUKA焊接机器人 KUKA焊接机器人
Page No. •
MEMBER OF THE KUKA SCHWEISSANLAGEN GROUP
KUKA Automation Equipment Co. Ltd.
3个外部扩展轴 个外部扩展轴
Page No. • Department/Producer • Date
MEMBER OF THE KUKA SCHWEISSANLAGEN GROUP
KUKA Automation Equipment Co. Ltd.
Page No. • Department/Producer • Date
MEMBER OF THE KUKA SCHWEISSANLAGEN GROUP
KUKA Automation Equipment Co. Ltd.
GETTING CONCEPTS ON THE ROAD
变位机单元组合
Page No. • Department/Producer • Date
MEMBER OF THE KUKA SCHWEISSANLAGEN GROUP
KUKA Automation Equipment Co. Ltd.
GETTING CONCEPTS ON THE ROAD
库卡KRC4系列机器人首次开机启动软硬件设置)

菜单顺序,点配置,用户组
用户组选择,safety,recovery,密码KUKA
按下主菜单按键,并选择菜单序列配置> 安全配置
在窗口故障排除助手中即显示可能的故障原因的概览。 在该列表中选中字段:机器人或 RDC 存储器首次投入运行 按下按键现在激活。窗口通用自动打开 窗口通用通过关闭图标 关闭。 显示以下信息:已成功保存改动。用按键 OK确认 硬件选项选择:
首次开机启动,电池的电源线是没有接的,需要插上,X305,
X305
接好的X305
电机电 缆及刹 车线X31
编码 器线
检查机器人本体接线,
机器控制柜下面接线检查
1 XS1 电源接口 2 X7.1 附加轴 (7)电机接口 (焊钳或者行走轴)
3 X20 驱动电机接口 (轴 1-6) 7 X11 接口 (安全回路,可短接或者投入运行手动机器人)
10 X19 smartPAD-接口(示教器接口) 11 X21 RDC- 接口
接线检查完毕,打开开关,顺时针方向,首次开机时间比较长,耐心等 待
主电源 开关
首次开机,KCP的急停是按下去的,顺时针方向,拔起
急停按钮
首次开机页面,显示以下查询:RDC 存储器和控制系统不一致 什么被 更换了,用按键 机器人确认, 显示以下信息:网络配置已还原. 用按键 OK确认。 用按键 全部 OK确认在信息窗口可以被确认的所有信息。
点硬件选 项出现下 个页面
安全配置选项
首次开机完成Байду номын сангаас
• Haiyanglove (海阳) • Email :haiyagnlove@
KUKA外部自动配置
• PGNO_FBIT_REFL 程序镜像第一位;为 正常使用该选项,变量 “REFLECT_PROG_NR”必须指定为“1”;
• ALARM_STOP _I 内部紧急关断;在内部 急停情况下复位该输出,正常为1,急停为0。
输出接口2及说明
• PRO_ACT 程序激活;如 果机器人在执行程序,则该 输出为真;
• PGNO_REQ 程序号请求; 请求PLC发送程序号;
• APPL_RUN 程序运行; 通过设定这个输出,设置机 器人控制器与PLC通讯,确定 程序正被执行的细节。
输出接口3及ห้องสมุดไป่ตู้明
• IN_HOME 在HOME位置;该输出与 PLC通讯,把机器人在HOME位置信号反 馈给PLC;
可以互相讨论下,但要小声点
机器人启动时序
1、T1模式下选择CELL程序,手动执行程序,注意中间路径,有时机器人不在HOME点附近,回原点的过 程中需慢速运行,直至到达BCO。
2、松开执行键,重新按下,信息栏出现“运行方式错误”提示,点击信息栏上的“全部OK”确认消息,松开 驱动及运行键,把机器人的运行模式打到“外部自动”即可。
操作步骤: 1、权限切换到“专家”用户组; 2、打开 程序CELL.SRC; 3. 在“CASE”段中将名称“EXAMPLE” 用相应的子程序名称进行替换 ,删除名称前 的分号; 4、关闭程序并保存更改; 5、若修改存在错误,则在保存后CELL程序 上会出现一个“×”标识,点击CELL,显 示出错误位置,对错误进行修改。
输出接口1及说明
• PERI_RDY 驱动装置就绪;通过设定这个 输出,设置机器人控制器与PLC通讯驱动器接 通的细节;
KUKA_C4总线配置说明
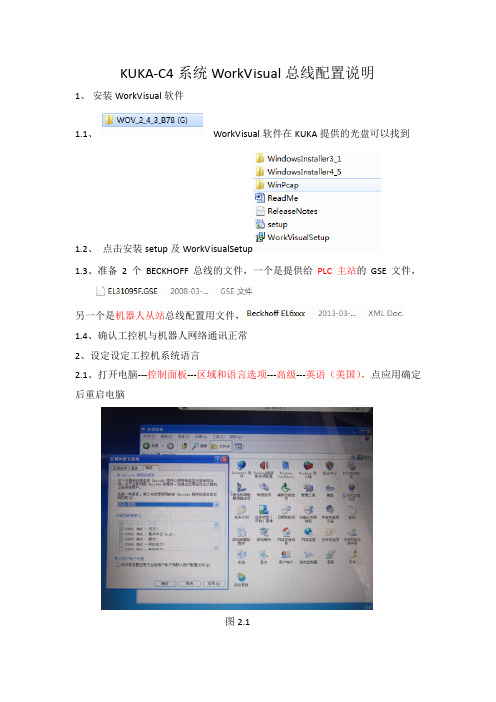
KUKA-C4系统WorkVisual总线配置说明1、安装WorkVisual软件1.1、WorkVisual软件在KUKA提供的光盘可以找到1.2、点击安装setup及WorkVisualSetup1.3、准备2个BECKHOFF总线的文件,一个是提供给PLC主站的GSE文件,另一个是机器人从站总线配置用文件,1.4、确认工控机与机器人网络通讯正常2、设定设定工控机系统语言2.1、打开电脑---控制面板---区域和语言选项---高级---英语(美国),点应用确定后重启电脑图2.12.2、设定机器人系统语言图2.22.3、下载项目时,先将机器人设置为安全模式图2.33、打开WorkVisual软件3.1、打开软件后显示对话框,点击退出,如图3.1图3.13.2、导入机器人从站配置文件如图3.2点击File---Import/Export 如图3.2图3.2下一步选择Import device descriction file---Next---选择要导入的文件,如图3.3图3.3下一步文件类型,选择EtherCAT ESI,点打开,如图3.4图3.4下一步点NEXT,如图3.5图3.5 完成导入ESI文件,如图3.6图3.64、打开DTM样本管理首先点击Extras---DTM Catalog Management---,如图图4.1.4则为导入完成,最后点击OK完成,如图4.1图4.1下一步点击Search for Installed DTMs---软件自动搜索DTM文件,如图4.2图4.2 DTM文件搜索过程中,如图4.3图4.3 下一步需要确认文件是否导入到DTM中,确认完成点OK,如图4.4图4.4 5、打开机器人项目首先点击File---Open Project,如图5.1图5.1下一步点击Browse找到当前机器人的项目点Open 如图5.2图5.2 下一步右键点击Steuerung---激活当前控制器Set as active controller如图5.3图5.3下一步右键点击EL6731-0010-PROFIBUS SLAVE---Add如图5.4图5.4下一步在DTM Selection窗口下选择EL6731-0010这项,并点击OK,如图5.5图5.5下一步完成添加后,出现一个减号图标, 如图5.5图5.56、进行机器人从站地址设定及I/O的分配首先双击EL6731-0010-PROFIBUS Slave,出现图6.1右边窗口,将Device ID设为与PLC设定从站相同的地址,如图6.1图6.1下一步双击EL6731-0010,设定输入输出的数量,现设为8 word字,1word=2byte(字节)1byte=8bit(位)通常所说的点,16*8=128个输入/输出点,先点一下左边Slot(1),再双击右边窗口,输入/输出各一组,完成后点APPLY---OK,如图6.2图6.2 下一步点击左侧KRC I/Os---Digital Inputs,再点击右侧Fieldbusses---点EL6731-0010图6.3下一步需要将左下侧窗口BOOL转换为BYTE,每次选8个为一组,如图6.4图6.4下一步点右键选择Group,如图6.5图6.5下一步选择BYTE,如图6.6图6.6下一步将右下侧窗口点击一组BYTE,按住向左边拖放,如图6.7图6.7 重复图6.4、6.5、6.6、6.7步骤,完成输入输出各128个,下一步先确认机器人登录用户为安全模式后,再点击编译在编译过程中不能有报错提示,并保存项目。
关于与库卡机器人外部自动启动配置总结ppt课件

27th August 2014
29
Automobile Production Solution
Step7与KUKA机器人外部自动启动 配置总结
汽车工业设备专家 Auto Industry Equipment Specialist
框架内容
技术经验总结 标准化总结 后续改造注意事项
27th August 2014
11
技术经验总结 硬件图纸设计/选型 软件设计/调试 机器人示教调试 电气安装
KRC4 >> PLC
PLC >> KRC4
右图HMI 界面机器人与PLC 重要IO交互表
在测试PLC与机器人外部自动 启动时,可以很好查看启动 过程重要的交互信号。
27th August 2014
27 27
43
27th August 2014
2828
THANK YOU
SUCCESS
2019/5/10
关键词:
• Step7 • PLC • KUKA • KRC4 • Profinet • Profisafe • 机器人 • 试教器 • 输入 • 输出
27th August 2014
3
33
目录
1 接口信号定义说明 2 机器人外部运行控制接口配置 3 机器人外部自动启动IO信号配置 4 机器人外部自动启动时序 5 机器人程序配置 6 PLC程序-机器人控制功能块配置
20 20
六、PLC程序-机器人控制功能块配置
配置机器人外部工具的数量 配置机器人在HMI画面被选择操作按钮
27th August 2014
21 21
六、PLC程序-机器人控制功能块配置
生产线启动机器人的外部启动条件 生产线停止机器人的外部停止条件 该信号常规为“1” 机器人全部工作结束反馈信号