西北工业大学自动控制原理 (1)
西北工业大学—自动控制原理

ur
u u a m up
l
消去中间变量得:
Tm l l k 1 k 2 k 3 k 4 k m l k 1k 2 k 3 k m u a ─二阶线性定常微分方程
即: l
1 k1k 2 k 3k 4 k m kk kk l l 1 2 3 m ua Tm Tm Tm
R 1 1 uc uc ur L LC LC
── 2 阶线性定常微分方程
(2)弹簧—阻尼器机械位移系统 分析 A、B 点受力情况
A x 0 ) k2x0 k1 (x i x A ) f(x
A
B
由 k 1 ( x i x A ) k1 x A 解出 x A x i
第一章:自动控制理论的一般概念 §1.1 引言 §1.2 自动控制理论发展概述 发展过程: 19 世纪
呼应 与西方工业革命发展相
时域 复域 频域
20 世纪 60 年代初
古典控制理论 (单入/出)
与航天技术发展相呼应
现(近)代控制理论 (多入 / 出)
2.
闭环(信号有反向作用) 特点:复杂、抗干扰能力强、精度高、有稳定性问题。
3.
复合(前向联系、反向作用) 特点:性能要求高时用之。 例如:炉温系统可以采用开环或闭环的。
闭环控制工作原理:
给定量:使c跟踪r 外部作用: 干扰量:使c偏离r
控制目的:排除干扰因素、影响、使被控量随给定量变化。 负反馈原理——构成闭环控制系统的核心
0
at e
t 0 t 0
L[f ( t )] e at e st dt e sa t dt
0 0
西北工业大学—自动控制原理
联系并准备
实验二:典型环节模拟 实验三:二阶系统特征参数对性能的影响
联系地点: 实验大楼 12 楼
联 系 人: 杨建华 (实验中心主任)
§3.5
线性系统的稳定性分析
§3.5.1 稳定性的概念 lim k(t) 0 t
§3.5.2 稳定的充要条件
系统闭环特征方程的所有根都具有负的实部 或所有闭环特征根均位于左半s平面
自动控制原理
西北工业大学自动化学院
自动控制原理教学组
自动控制原理
本次课程作业(9)
3 — 8, 9, 10
自动控制原理
(第 9 讲) §3 线性系统的时域分析与校正
§3.1 概述 §3.2 一阶系统的时间响应及动态性能 §3.3 二阶系统的时间响应及动态性能 §3.4 高阶系统的阶跃响应及动态性能 §3.5 线性系统的稳定性分析 §3.6 线性系统的稳态误差 §3.7 线性系统时域校正
§3.5
线性系统的稳定性分析(2)
§3.5.2 稳定的充要条件
根据系统稳定的定义,若 lim k(t) 0 ,则系统是稳定的。
t
必要性: (s) M (s) bm (s z1 ) (s z2 ) (s zm ) D(s) an(s 1 ) (s 2 ) (s n )
充分性:
C(s) (s)
解. 列劳斯表
s5 1
0
s4 2
0
s3 80
00
s2 e0
-2
s1 16 /e
0
s0 -2
-1
-2
列辅助方程: 2s4 2 0
d 2s4 2 8s3 0
ds
第一列元素变号一次,有一个正根,系统不稳定
§3.5
05-06西北工业大学本科自动控制原理期末试题(一)参考答案

4% £¤AU¦VW786qr0123s G(S) =
K
Dnò@9@A 15 BC
a) b)
DÉ7r(t8) =X2Ht E62KQDP¯ò78
6XYbcs
s(0.1s +1)(0.2s +1)
DF (°G
0.25 K
T
ï5þ%31£ðÿ¤ñÔ@Ep9@ÄÊA7U872586Bq6Crq0r1³233´µG(S)G,HLòG(ωÊ) zÖIÍÎaÏdPÐp6³3´µG L C (ω)
N (S )
% A N(S) = 0 % C 1+ N(S) = 0
DB%%iN9(S)+sMA(S)U=V0 W78
4%SAUVW78D0123s G(S)DVW0123s H(S)DBCH g6bc E(S)iBEHg6bc E*(S) 7@
% A E(S) = H (S) ⋅ E*(S )
C % 2s +1 0.5s +1
D% 0.1s +1 10s +1
二、分析计算题 (共 80 分)
1
%£¤78íî
ï
1
ðñ
Dò0123
C R
(S (S
) )
óôõ 15 ö÷
R(S)
G1
G4
G2
G3
C(S)
H1
ï 1
2
%78íî
ï
2
ðñDnò78
6Õøù σ
%
zøú
Q
t
s
û
óôõ 10 ö÷
r(t) = R ⋅1(t)
P
B%h r(t) = R ⋅1(t) QDBEUpiBCUp6XYbcP
《自动控制原理》卢京潮主编课后习题答案西北工业大学出版社
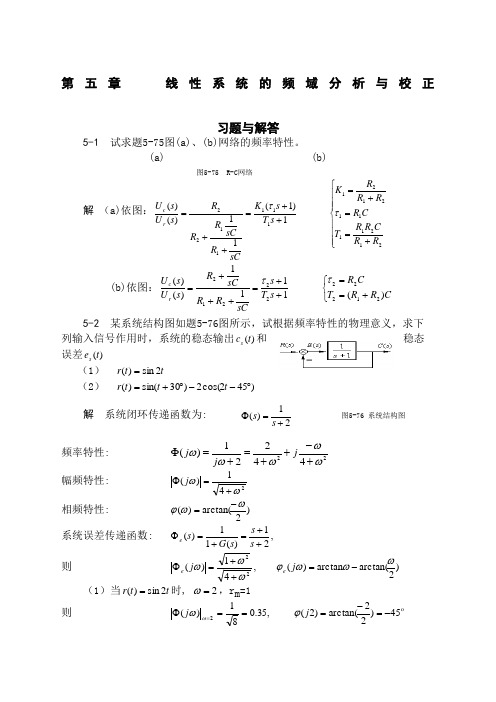
第五章 线性系统的频域分析与校正习题与解答5-1 试求题5-75图(a)、(b)网络的频率特性。
(a) (b)图5-75 R-C 网络解 (a)依图:⎪⎪⎪⎩⎪⎪⎪⎨⎧+==+=++=++=2121111212111111221)1(11)()(R R C R R T C R RR R K s T s K sC R sC R R R s U s U r c ττ (b)依图:⎩⎨⎧+==++=+++=C R R T CR s T s sCR R sC R s U s U r c)(1111)()(2122222212ττ 5-2 某系统结构图如题5-76图所示,试根据频率特性的物理意义,求下列输入信号作用时,系统的稳态输出)(t c s 和稳态误差)(t e s(1) t t r 2sin )(=(2) )452cos(2)30sin()(︒--︒+=t t t r 解 系统闭环传递函数为: 21)(+=Φs s 图5-76 系统结构图 频率特性: 2244221)(ωωωωω+-++=+=Φj j j 幅频特性: 241)(ωω+=Φj相频特性: )2arctan()(ωωϕ-=系统误差传递函数: ,21)(11)(++=+=Φs s s G s e 则 )2arctan(arctan )(,41)(22ωωωϕωωω-=++=Φj j e e(1)当t t r 2sin )(=时, 2=ω,r m =1 则 ,35.081)(2==Φ=ωωj ο45)22arctan()2(-=-=j ϕ(2) 当 )452cos(2)30sin()(︒--︒+=t t t r 时: ⎩⎨⎧====2,21,12211m m r r ωω5-3 若系统单位阶跃响应 试求系统频率特性。
解 ss R s s s s s ss C 1)(,)9)(4(3698.048.11)(=++=+++-= 则 )9)(4(36)()()(++=Φ=s s s s R s C 频率特性为 )9)(4(36)(++=Φωωωj j j5-4 绘制下列传递函数的幅相曲线:解 ()()()12G j K j K e j ==-+ωωπ幅频特性如图解5-4(a)。
西北工业大学自动控制原理课件-36资料教程

dx f(x, x)
dx
x
f (x, x) 0
x0
相轨迹以90°穿越 x 轴
§7.2
相平面法(3)
§7.2.3 相轨迹的绘制 —— 解析法
例2 设系统方程为 xn 2x0,
试绘制系统的相轨迹。
解
xdx dt
dx dx
dx dt
x
dx dx
n2x
x dx n 2xdx
1x2 n2 x2C
例3 系统方程 x x x 0 ,用等倾斜线法绘制系统相轨迹图。
解
xxdx (xx) dx
(xx) x
等倾斜线方程
x x
1
(1 )x x
3.752.191.581.180.820.42 0.19 1.75
1 1 0.36 0.84 1.73 5.67 5.761.730.840.360.00
系统变量及其导数随时间变化 在相平面上描绘出来的轨迹。
例1 单位反馈系统
G(s) 5 s(s 1)
n 2.236 0.2236
r(t)1(t)
相轨迹图:相平面 + 相轨迹簇
§7.2
相平面法(2)
§7.2.2 相轨迹的性质
(1)相轨迹的斜率
设非线性系统方程为:
x f(x ,x ) 0
xd xd xd xxd xf(x,x) dxdxdt f(x,x)
x0.5xx0
特征 方程
x0.5xx0
s
s2 0.5s 1 0
s2 0.5s 1 0
s
= =
0.25
0 .7 8
-
1
.
2
8
j0 .9 7
不稳定焦点 鞍点
《自动控制原理》(卢京潮,西北工业大学)第一章习题及答案[1]
![《自动控制原理》(卢京潮,西北工业大学)第一章习题及答案[1]](https://img.taocdn.com/s3/m/4e1dbe0b763231126edb11d3.png)
一、 习 题 及 解 答第1章习题及解答1-1 根据图1-15所示的电动机速度控制系统工作原理图,完成:(1) 将a ,b 与c ,d 用线连接成负反馈状态;(2) 画出系统方框图。
解 (1)负反馈连接方式为:,d a ↔c b ↔;(2)系统方框图如图解1-1 所示。
1-2 图1-16是仓库大门自动控制系统原理示意图。
试说明系统自动控制大门开、闭的工作原理,并画出系统方框图。
图1-16 仓库大门自动开闭控制系统解 当合上开门开关时,电桥会测量出开门位置与大门实际位置间对应的偏差电压,偏差电压经放大器放大后,驱动伺服电动机带动绞盘转动,将大门向上提起。
与此同时,和大门连在一起的电刷也向上移动,直到桥式测量电路达到平衡,电动机停止转动,大门达到开启位置。
反之,当合上关门开关时,电动机带动绞盘使大门关闭,从而可以实现大门远距离开闭自动控制。
系统方框图如图解1-2所示。
1-3 图1-17为工业炉温自动控制系统的工作原理图。
分析系统的工作原理,指出被控对象、被控量和给定量,画出系统方框图。
图1-17 炉温自动控制系统原理图解 加热炉采用电加热方式运行,加热器所产生的热量与调压器电压c u 的平方成正比,c u 增高,炉温就上升,c u 的高低由调压器滑动触点的位置,该触点由可逆转的直流电动机驱动。
炉子的实际温度用热电偶测量,输出电压f u 。
f u 作为系统的反馈电压与给定电压r u 进行比较,得出所控制偏差电压,经电压放大器、功率放大器放大成后,作为 况下,炉温等于某个期望值e u a u 控制电动机的电枢电压。
在正常情T °C ,热电偶的输出电压f u 正好等于给定电压r u 。
此时,0=−=f r e u u u 故01,==a u u ,可逆电动机不转动,调压器的滑动触点停留在某个合适的位置上,使c u 保持一定的数值。
这时,炉子散失量正好等于从加热器吸的热取的热量,形成稳定的热平衡状态,温度保持恒定。
西北工业大学821自动控制原理重难点解析课程讲义

G G G G G G G G G G G G G G G G G G G G H 1 2 3 4+ 1 2 4+ 2 3 4 5+ 2 4 5- 3 4 6- 2 4 6 2 s )= Φ( 1- G H + G G G G H + G G G H 2 2 1 2 3 4 1 1 2 4 1 【 例6 】 已知系统结构图, 求 C ( s ) = ? ) R ( S
西北工业大学 8 2 1自动控制原理重难点解析篇
第 1讲 控制系统的数学模型
拉普拉斯变换有关内容 拉氏变换的几个重要定理 ( 1 ) 线性性质 L [ a f ( t )± b f ( t ) ]= a F ( s )± b F ( s ) 1 2 1 2 ( 2 ) 微分定理 L [ f ′ ( t ) ]= s ·F ( s )- f ( 0 )
2 t / 2 - a t e
1 1 / s
2 1 / s 3 1 / s
1 / ( s + a )
2 2 / ( s + ω ω) 2 2 s / ( s + ω)
s i n t ω c o s t ω
线性定常微分方程求解 【 例1 】 R- C电路计算 u R i + u r= c
· i = c u u ( t )= E ·1 ( t ) c r 0
考试点( w w w . k a o s h i d i a n . c o m ) 名师精品课程 电话: 4 0 0 6 8 8 5 3 6 5
其中初条件引起的自由响应部分 C C - 41 1 1 - ( s + 5 ) 1 2 C = + = + ( s )= 0 ) s + 1 s + 4 3s + 1 3s + 4 ( s + 1 ) ( s + 4
C i m 1 =l
西北工业大学自动控制原理模拟题与答案胡祝兵
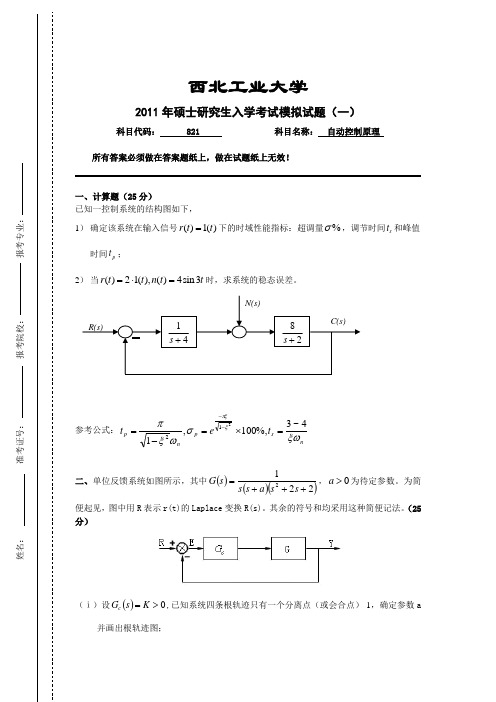
西北工业大学2011年硕士研究生入学考试模拟试题(一)科目代码: 821 科目名称: 自动控制原理所有答案必须做在答案题纸上,做在试题纸上无效!一、计算题(25分)已知一控制系统的结构图如下,1) 确定该系统在输入信号()1()r t t =下的时域性能指标:超调量%σ,调节时间s t 和峰值时间p t ;2) 当()21(),()4sin3r t t n t t =⋅=时,求系统的稳态误差。
参考公式:ns p np t et ξωσωξπξπξ4~3%,100,1212=⨯=-=--二、单位反馈系统如图所示,其中()()()2212+++=s s a s s s G ,0>a 为待定参数。
为简便起见,图中用R 表示r(t)的Laplace 变换R(s)。
其余的符号和均采用这种简便记法。
(25分)(ⅰ)设()0>=K s G c ,已知系统四条根轨迹只有一个分离点(或会合点)-1,确定参数a并画出根轨迹图;14s +82s +R(s)N(s)C(s)(ⅱ)确定根轨迹和虚轴的交点并由此确定使闭环系统稳定的K 值。
(ⅲ)确定系统输出无衰减振荡分量时的闭环传递函数。
三、已知最小相位系统的开环对数幅频特性渐近线如图所示,c ω位于两个交接频率的几何中心。
(25分)1) 计算系统对阶跃信号、斜坡信号和加速度信号的稳态精度。
计算超调量%σ和调节时间s t四、某火炮指挥系统结构如下图所示,()(0.21)(0.51)KG s s s s =++系统最大输出速度为2r/min ,输出位置的容许误差小于2,(25分)求:1) 确定满足上述指标的最小K 值,计算该K 值下的相位裕量和幅值裕量; 2) 前向通路中串联超前校正网络0.41()0.081c s G s s +=+,试计算相位裕量。
()G s ()R s ()E s ()C s五、已知系统的结构图如图所示。
(25分)(ⅰ)求出系统的闭环脉冲传递函数。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第一章:自动控制理论的一般概念
§1.1引言
§1.2自动控制理论发展概述 发展过程:
19世纪
−−−−−−−→−呼应
与西方工业革命发展相
⎪⎭
⎪⎬⎫⎪⎩⎪⎨⎧频域复域时域 20世纪60年代初
−−−−−−→−与航天技术发展相呼应
⎪⎪⎭
⎪⎪⎬⎫⎪⎪⎩⎪⎪⎨⎧系统辩识等最佳估计最优控制线性系统 应用:深入到人民生产、生活的各个领域
日常生活:收音机、电视机、冰箱、空调、汽车、飞机… 工程:数控机床、合成塔、核反应堆… 军事:火炮群、导弹、特种炸弹、垂直起降飞机… 科技:航天飞机、卫星姿态控制、机器人… §1.3自动控制和自动控制系统的基本概念
◇ 自动控制: 在无人直接参与的情况下,使被控对象的一个物理
量(被控量)按预定规律(给定量)运行。
出)(单入古典控制理论/出)
(多入现(近)代控制理论/
◇自动控制系统:能对被控对象的工作状态进行自动控制的系统。
举例:被控对象被控量C给定量R 炉温控制系统烘炉炉温T u r(T希望值)X-Y记录仪笔笔位移L u r(L希望值)液压控制系统水箱水箱水位H u r(H希望值)
1.开环(信号单向流动)
特点:简单、稳定、精度低。
2.闭环(信号有反向作用)
特点:复杂、抗干扰能力强、精度高、有稳定性问题。
3.复合(前向联系、反向作用)
特点:性能要求高时用之。
例如:炉温系统可以采用开环或闭环的。
闭环控制工作原理:
外部作用:
⎩
⎨
⎧
r
c
r
c
偏离
干扰量:使
跟踪
给定量:使
控制目的:排除干扰因素、影响、使被控量随给定量变化。
负反馈原理——构成闭环控制系统的核心
把系统的输出信号引回输入端,与输入信号相比较,利用所得的偏差信号进行控制,达到减小偏差、消除偏差的目的。
负反馈控制系统的特点——按偏差控制的具有负反馈的闭环系统1)、有反馈,信号流动构成闭回路。
2)、按偏差进行控制。
§1.4控制系统的组成
组成(以X-Y记录仪为例)
控制器:
①测量元件:测量被控量
②比较元件:产生偏差信号
③放大元件:对偏差信号进行幅值、功率放大
④执行机构:对被控对象施加作用
⑤校正元件:改善系统性能
⑥给定元件:给出输入信号
二、外部作用:
1.给定量:使被控量跟随给定量。
2.干扰量:使被控量偏离给定量。
自控系统的目的在于:排除扰动量的影响,使被控量随给定量而变化。
例:液面控制系统:
介绍由原理图画方块图的步骤:(以角度随动系统为例)
①看懂工作原理图,找出被控量、被控对象、给定量。
②从两头来,先画出给定量、被控对象和被控量。
③依原理图补上中间部分。
§1.5 示例
§1.6 分类(按r形式)
⎩
⎨
⎧
记录仪)
随动系统(如
)
调节系统(如炉温系统
Y
-
X
按特性分:线性、非线性、定常或时变
◇负反馈(闭环)控制原理:——构成自控系统的核心
根据给定量与被控量之间的偏差,产生控制作用,并力
图减小偏差,使被控量趋于给定量。
◇闭环(负反馈)控制系统的特点:——用以区分开、闭环系统
⎭
⎬
⎫
、偏差信号起控制作用
路
、有反馈,能够成闭回
)2
)1
是按偏差控制的、具有负反馈的闭环系统
§1.7 控制系统的基本要求--是否只要构成负反馈就能正常工作?
一、控制过程分析:(加阶跃输入,以X-Y记录仪为例)
可见:控制过程有一个过渡过程:
振荡原因:
1、内部原因:系统有惯性,有储能元件。
2、外部原因:参数配置不当。
3、分类(按输入
信号的形式不同)
(1)稳定系统(调节系统):r(t)是定常值(如炉温系统)
(2)随动系统(跟踪系统):r(t)是时变量(如角度控制系统)
1、典型外作用:
作用名称表达式图形关系举例
常用于时域分析单位
脉冲
挑瓜、钉丁
打炮、踢球单位
阶跃
合闸
滴注、龙头单位
斜坡⎩
⎨
⎧
≥
<
=
,
,0
)(
t t
t
t f
匀速跟踪
频域分析正弦
函数
交流电压⎰∞
∞
-
=
⎩
⎨
⎧
=
∞
≠
=
1
)(
,
,0
)(
dt
t
t
t
t
δ
δ
⎩
⎨
⎧
≥
<
=
,1
,0
)(1
t
t
t
)
sin(
)(ϕ
ω-
⋅
=t
A
t f
2.对系统的阶跃响应性能要求:
我们要求被控量尽可能好地跟踪给定量,但常常不能完全符合。
例如角度系统。
⎪
⎪
⎪
⎩
⎪
⎪
⎪
⎨
⎧
⎩
⎨
⎧
⎩
⎨
⎧
:
:
:
:
σ
超调量
调节时间
过渡过程要求
匀
快
稳态要求,稳态误差
准
基本要求,稳定性
稳
性能要求:
s
s
t
e
作业布置:第一章1-5题。