西北工业大学自动控制原理 (19)
西北工业大学自动控制原理
基本控制方式
1. 开环控制 2. 闭环控制 3. 复合控制
例 1 炉温控制系统
炉温控制系统方框图
炉温控制系统方框图
方框图中各符号的意义
方框(块)图 中的符号
元部件 信号(物理量)及传递方向 比较点 引出点 表示负反馈
例 2 函数记录仪
函数记录仪方框图
负反馈原理
将系统的输出信号引回输入端,与输 入信号相比较,利用所得的偏差信号进行 控制,达到减小偏差、消除偏差的目的。
课 程小结
1. 自动控制的一般概念 基本控制方式 控制系统的基本组成 控制系统的分类 对控制系统的要求 课程研究的内容
2. 要求掌握的知识点 负反馈控制系统的特点及原理 由系统工作原理图绘制方框图
引言 自动控制理论发展概述 自动控制和自动控制系统的基本概念 自动控制系统的基本组成 控制系统示例
自动控制理论发展简史
• 经典控制理论
( 19世纪初 ) 时域法
复域法 (根轨迹法) 频域法
• 现代控制理论
( 20世纪60年代 ) 线性系统 最优控制 最世纪70年代 ) 专家系统 模糊控制 神经网络 遗传算法
自动控制原理
本次课程作业(1)
1 —1, 2, 3
自我介绍
卢京潮
办公室: 自动化学院 234
联系方式:
(办公室) (手机)
自动控制系统的原理与应用
电视教学片
(1) 自动控制系统的原理与组成 (2) 自动控制技术的应用
自动控制原理
(第 1 讲)
第一章 自动控制的一般概念
§1.1 §1.2 §1.3 §1.4 §1.5
自适应控制 鲁棒控制 容错控制 集散控制 大系统复杂系统
自动控制原理
西北工业大学—自动控制原理

ur
u u a m up
l
消去中间变量得:
Tm l l k 1 k 2 k 3 k 4 k m l k 1k 2 k 3 k m u a ─二阶线性定常微分方程
即: l
1 k1k 2 k 3k 4 k m kk kk l l 1 2 3 m ua Tm Tm Tm
R 1 1 uc uc ur L LC LC
── 2 阶线性定常微分方程
(2)弹簧—阻尼器机械位移系统 分析 A、B 点受力情况
A x 0 ) k2x0 k1 (x i x A ) f(x
A
B
由 k 1 ( x i x A ) k1 x A 解出 x A x i
第一章:自动控制理论的一般概念 §1.1 引言 §1.2 自动控制理论发展概述 发展过程: 19 世纪
呼应 与西方工业革命发展相
时域 复域 频域
20 世纪 60 年代初
古典控制理论 (单入/出)
与航天技术发展相呼应
现(近)代控制理论 (多入 / 出)
2.
闭环(信号有反向作用) 特点:复杂、抗干扰能力强、精度高、有稳定性问题。
3.
复合(前向联系、反向作用) 特点:性能要求高时用之。 例如:炉温系统可以采用开环或闭环的。
闭环控制工作原理:
给定量:使c跟踪r 外部作用: 干扰量:使c偏离r
控制目的:排除干扰因素、影响、使被控量随给定量变化。 负反馈原理——构成闭环控制系统的核心
0
at e
t 0 t 0
L[f ( t )] e at e st dt e sa t dt
0 0
自动控制原理

Mason 公式(4)
例 4 求传递函数 C(s)/R(s)
控制系统结构图
例 4 求C(s)/R(s)
Mason 公式(5)
例 5 求传递函数 C(s)/R(s)
控制系统结构图
例 5 求C(s)/R(s)
Mason 公式(6)
例 6 求传递函数 C(s)/R(s), C(s)/N(s)
控制系统结构图
控制系统的数学模型
自动控制原理
(第 7 讲)
第二章 控制系统的数学模型
§2.1 §2.2 §2.3 §2.4 §2.5 §2.6
引言 控制系统的时域数学模型 控制系统的复域数学模型 控制系统的结构图及其等效变换 控制系统的信号流图 控制系统的传递函数
§2.5 控制系统的信号流图
§2.5.1 信号流图与结构图的对应关系
控制系统的数学模型
自动控制原理
本次课程作业(4)
2 —17, 18, 19, 20
自动控制原理
西北工业大学自动化学院
自动控制原理教学组
自动控制原理
本次课程作业(4)
2 —17, 18, 19, 20
课程回顾
2.3 复域数学模型 —— 传递函数 (1)传递函数的定义、性质和适用范围 (2)常用控制元件的传递函数 (3)典型环节
2.4 控制系统的结构图及其等效变换 (1)系统结构图的导出 (2)结构图等效化简
例6 求 C(s)/R(s), C(s)/N(s)
§2.6 控制系统的传递函数
1. 开环传递函数
2. 输入 r (t) 作用下的闭环传递函数
控制系统的传递函数
3. 干扰 n(t) 作用下的闭环传递函数
4. 系统的总输出 C(s) 及总误差 E(s)
西北工业大学—自动控制原理
联系并准备
实验二:典型环节模拟 实验三:二阶系统特征参数对性能的影响
联系地点: 实验大楼 12 楼
联 系 人: 杨建华 (实验中心主任)
§3.5
线性系统的稳定性分析
§3.5.1 稳定性的概念 lim k(t) 0 t
§3.5.2 稳定的充要条件
系统闭环特征方程的所有根都具有负的实部 或所有闭环特征根均位于左半s平面
自动控制原理
西北工业大学自动化学院
自动控制原理教学组
自动控制原理
本次课程作业(9)
3 — 8, 9, 10
自动控制原理
(第 9 讲) §3 线性系统的时域分析与校正
§3.1 概述 §3.2 一阶系统的时间响应及动态性能 §3.3 二阶系统的时间响应及动态性能 §3.4 高阶系统的阶跃响应及动态性能 §3.5 线性系统的稳定性分析 §3.6 线性系统的稳态误差 §3.7 线性系统时域校正
§3.5
线性系统的稳定性分析(2)
§3.5.2 稳定的充要条件
根据系统稳定的定义,若 lim k(t) 0 ,则系统是稳定的。
t
必要性: (s) M (s) bm (s z1 ) (s z2 ) (s zm ) D(s) an(s 1 ) (s 2 ) (s n )
充分性:
C(s) (s)
解. 列劳斯表
s5 1
0
s4 2
0
s3 80
00
s2 e0
-2
s1 16 /e
0
s0 -2
-1
-2
列辅助方程: 2s4 2 0
d 2s4 2 8s3 0
ds
第一列元素变号一次,有一个正根,系统不稳定
§3.5
西北工业大学自动控制原理考试试题汇总

装订线注:2. 命题教师和审题教师姓名应在试卷存档时填写。
共4页 第1页学号:姓名:自动控制原理试题A (56学时)答案及评分标准一、答案:A C B B A D C D C B评分标准:每小题2分二、1、答案:()12314()12314123141C S R S G G G G G G G G G G H G G H G +++--=评分标准:15分(按步骤给分)2、答案:%16.3 1.4s σ=s =% t 评分标准:10分,每一问5分3、答案:(1)*13K ω=-==12a d = d 3K (2) 13<<15评分标准:15分 第一问10分,第二问5分4、答案:(1) (2) K=80K <<评分标准: 15分 第一问8分,第二问7分 5、答案:(1) ()(1)(11020K G s s ss ++=)033.4γ=- K=100(2) 3.1251()1001c s G s s ++=(3) 0100(3.1251)()(1)(1)(10011020'57.7c s GG s s s s s γ+⎧⎪⎪+++⎨⎪=⎪⎩=) 评分标准:25分 第一问10分,第二问5分,第三问10分装订线注:2. 命题教师和审题教师姓名应在试卷存档时填写。
共4页 第1页学号:姓名:自动控制原理试题B (56学时)答案及评分标准一、 答案:C D B A B C A D C B评分标准:每小题2分二、1、答案:%16.3 1.4s σ=s =% t评分标准:10分,每一问5分2、答案:(1)*13K ω=-==12a d = d 3K (2) 13<<评分标准:15分 第一问10分,第二问5分 3、答案:()12314()12314123141C S R S G G G G G G G G G G H G G H G +++--=评分标准:15分(按步骤给分) 4、答案: (1) ()(1)(11020K G s s s s )++= K=10033.4γ=-(2) 3.12511001c S G S ++=(3) 0100(3.1251)()(1)(1)(1001)1020'57.7c s GG s s s s s γ+⎧⎪⎪+++⎨⎪=⎪⎩=评分标准:25分 第一问10分,第二问5分,第三问10分5、 答案:(1) (2) K=80K <<15评分标准: 15分 第一问8分,第二问7分诚信保证本人知晓我校考场规则和违纪处分条例的有关规定,保证遵守考场规则,诚实做人。
《自动控制原理》卢京潮主编课后习题答案西北工业大学出版社
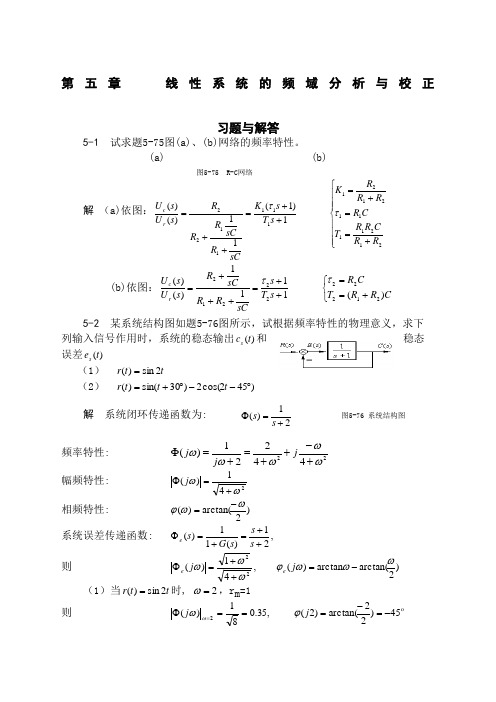
第五章 线性系统的频域分析与校正习题与解答5-1 试求题5-75图(a)、(b)网络的频率特性。
(a) (b)图5-75 R-C 网络解 (a)依图:⎪⎪⎪⎩⎪⎪⎪⎨⎧+==+=++=++=2121111212111111221)1(11)()(R R C R R T C R RR R K s T s K sC R sC R R R s U s U r c ττ (b)依图:⎩⎨⎧+==++=+++=C R R T CR s T s sCR R sC R s U s U r c)(1111)()(2122222212ττ 5-2 某系统结构图如题5-76图所示,试根据频率特性的物理意义,求下列输入信号作用时,系统的稳态输出)(t c s 和稳态误差)(t e s(1) t t r 2sin )(=(2) )452cos(2)30sin()(︒--︒+=t t t r 解 系统闭环传递函数为: 21)(+=Φs s 图5-76 系统结构图 频率特性: 2244221)(ωωωωω+-++=+=Φj j j 幅频特性: 241)(ωω+=Φj相频特性: )2arctan()(ωωϕ-=系统误差传递函数: ,21)(11)(++=+=Φs s s G s e 则 )2arctan(arctan )(,41)(22ωωωϕωωω-=++=Φj j e e(1)当t t r 2sin )(=时, 2=ω,r m =1 则 ,35.081)(2==Φ=ωωj ο45)22arctan()2(-=-=j ϕ(2) 当 )452cos(2)30sin()(︒--︒+=t t t r 时: ⎩⎨⎧====2,21,12211m m r r ωω5-3 若系统单位阶跃响应 试求系统频率特性。
解 ss R s s s s s ss C 1)(,)9)(4(3698.048.11)(=++=+++-= 则 )9)(4(36)()()(++=Φ=s s s s R s C 频率特性为 )9)(4(36)(++=Φωωωj j j5-4 绘制下列传递函数的幅相曲线:解 ()()()12G j K j K e j ==-+ωωπ幅频特性如图解5-4(a)。
自动控制原理卢京潮主编课后习题答案西北工业大学出版社

自动控制原理卢京潮主编课后习题答案西北工业大学出版社SANY标准化小组 #QS8QHH-HHGX8Q8-GNHHJ8-HHMHGN#第五章 线性系统的频域分析与校正习题与解答5-1 试求题5-75图(a)、(b)网络的频率特性。
(a) (b)图5-75 R-C 网络解 (a)依图:⎪⎪⎪⎩⎪⎪⎪⎨⎧+==+=++=++=2121111212111111221)1(11)()(R R C R R T C R RR R K s T s K sC R sC R R R s U s U r c ττ (b)依图:⎩⎨⎧+==++=+++=C R R T CR s T s sCR R sC R s U s U r c)(1111)()(2122222212ττ 5-2 某系统结构图如题5-76图所示,试根据频率特性的物理意义,求下列输入信号作用时,系统的稳态输出)(t c s 和稳态误差)(t e s(1) t t r 2sin )(=(2) )452cos(2)30sin()(︒--︒+=t t t r 解 系统闭环传递函数为: 21)(+=Φs s 图5-76 系统结构图 频率特性: 2244221)(ωωωωω+-++=+=Φj j j 幅频特性: 241)(ωω+=Φj相频特性: )2arctan()(ωωϕ-=系统误差传递函数: ,21)(11)(++=+=Φs s s G s e 则 )2arctan(arctan )(,41)(22ωωωϕωωω-=++=Φj j e e(1)当t t r 2sin )(=时, 2=ω,r m =1则 ,35.081)(2==Φ=ωωj 45)22arctan()2(-=-=j ϕ (2) 当 )452cos(2)30sin()(︒--︒+=t t t r 时: ⎩⎨⎧====2,21,12211m m r r ωω5-3 若系统单位阶跃响应 试求系统频率特性。
西北工业大学《自动控制原理》习题解答
《自动控制原理》习题解答西北工业大学自动化教研室第一章习题及答案1-3图1-3 (a),(b)所示均为调速系统。
(1) 分别画出图1-24(a)、图(b)所示系统的方框图。
给出图1-24(a) 所示系统正确的反馈连线方式。
(2) 指出在恒值输入条件下,图1-24(a),(b) 所示系统中哪个是有差系统,哪个是无差系统,说明其道理。
图1-3 调速系统工作原理图解图1-3 (a)正确的反馈连接方式如图1-3 (a)中虚线所示。
(1) 系统方框图如图解1-10所示。
(2) 图1-3 (a) 所示的系统是有差系统,图1-3 (b) 所示的系统是无差系统。
图1-3 (a)中,当给定恒值电压信号,系统运行达到稳态时,电动机转速的恒定是以发电机提供恒定电压为条件,对应发电机激磁绕组中电流一定是恒定值。
这意味着放大器前端电压是非零的常值。
因此,常值偏差电压存在是系统稳定工作的前提,故系统有差。
图1-3 (b)中,给定恒定电压,电动机达到稳定转速时,对应发电机激磁绕组中的励磁电流恒定,这意味着执行电动机处于停转状态,放大器前端电压必然为0,故系统无差。
1-4图1-4 (a),(b)所示的系统均为电压调节系统。
假设空载时两系统发电机端电压均为110V,试问带上负载后,图1-4(a),(b)中哪个能保持110V不变,哪个电压会低于110V?为什么?图1-4 电压调节系统工作原理图解带上负载后,开始由于负载的影响,图1-4(a)与(b)系统的端电压都要下降,但图(a)中所示系统能恢复到110V,而图(b) 所示系统却不能。
理由如下:图(a)系统,当u低于给定电压时,其偏差电压经放大器K放大后,驱动电机D转动,经I增大,发电机的输出电压会升高,从而使偏差电减速器带动电刷,使发电机F的激磁电流j压减小,直至偏差电压为零时,电机才停止转动。
因此,图(a)系统能保持110V不变。
图(b)系统,当u低于给定电压时,其偏差电压经放大器K后,直接使发电机激磁电流增大,提高发电机的端电压,使发电机G 的端电压回升,偏差电压减小,但不可能等于零,因i=0,发电机就不能工作。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
G( jw ) 定义二:
G( jw) G(s) s jw
G( jw ) 定义三: G( jw ) C( jw )
R( jw )
课程回顾(2)
§5.2 幅相频率特性(Nyquist图)
§5.2.1 典型环节的幅相特性曲线
⑴ 比例环节 G(s) K G( jw) K
G K G 0
⑵ 微分环节 G(s) s G( jw) jw G w
⑹ 振荡环节
G(s)
wn2 s2 2wns wn2
(
s
1
)2 2
s
wn2
1 (s 1 )(s 2 )
G(
jw )
1
w2 wn2
1
j2
w wn
wn
wn
G( j0) 10
G( j) 0 180
1
G
[1
w2
w
2 n
]2
[2
w wn
]2
2 w
G arctan
wn w2
1 - wn2
wn
wn
G(
jw )
1
w2 wn2
1
j2
w wn
1
G
[1
w2
w
2 n
]2
[2
w wn
]2
G arctan
2 w wn
w2
1
-
w
2 n
2 w
360 arctan
wn w2
1 - wn2
G( j0) 1 360 G( j) 0 180
§5.2
幅相频率特性 ( Nyquist )(11)
G 90
⑶ 积分环节
G(s) 1 s
G( jw ) 1 jw
G 1w G 90
⑷ 惯性环节
G(s) 1 Ts 1
G( jw ) 1 1 jwT
1 G
1 w 2T2 G arctanwT
课程回顾(3)
不稳定惯性环节 G(s) 1 Ts 1
G( jw ) 1 1 jwT
1 G
w2
w
2 n
j2
w wn
1 1 jwT
⑺
G(
jw
)
1
w2 wn2
j2 w wn
⑻ G( jw ) e j w
1
w2
w
2 n
1
2
2
wr wn 1 2 2
Mr G( jwr ) 2
1
12
例4:当 0.3, wn 1 ,时
wr 1 1 2 0.32 0.9055
1
Mr 2 0.3
1 0.32
1.832
§5.2
幅相频率特性 ( Nyquist )(8)
谐振频率 wr wn 1 2 2
谐振峰值
Mr 2
自动控制原理
西北工业大学自动化学院
自动控制原理教学组
自动控制原理
本次课程作业(19)
5 — 4, 5, 6, 7 5 — 8 (选作)
自动控制原理
(第 19 讲)
§5. 线性系统的频域分析与校正
§5.1 §5.2 §5.3 §5.4 §5.5 §5.6 §5.7 §5.8 §5.9
频率特性的基本概念 幅相频率特性(Nyquist图) 对数频率特性(Bode图) 频域稳定判据 稳定裕度 利用开环频率特性分析系统的性能 闭环频率特性曲线的绘制 利用闭环频率特性分析系统的性能 频率法串联校正
⑺
二阶复合微分
G(s)
T2s2
s T1 wn
2Ts 1
(
wn
)2
2
s
wn
1
G(
jw )
1
w2 wn2
j2
w wn
G
[1
w2
w
2 n
]2
[2
w wn
]2
2 w
G arctan
wn w2
1
-
w
2 n
2 w
2 w
G arctan
wn w2
360 arctan
wn w2
1
-wΒιβλιοθήκη 2 n1-
w
2 n
自动控制原理
(第 19 讲)
§5.2 幅相频率特性
(Nyquist 曲线)
课程回顾(1)
频率特性 G(jw) 的定义
G( jw ) 定义一:G( jw ) G( jw ) G( jw )
G( jw ) ucs(t)
1
ur (t ) 1 w 2T2
G( jw ) ucs(t ) ur (t ) arctan wT
§5.2
幅相频率特性 ( Nyquist )(9)
G( jw) 幅相特性
例5 系统的幅相曲线如图所试,求传递函数。
K
由曲线形状有
G(s)
s2
wn2
2
s
wn
1
由起点: G( j0) K0 K 2
K
G
[1
w2 w n2
]2
[2
w wn
]2
2 w
G arctan
wn w2
1 - wn2
由j(w0): G( jw0 ) 90 w0 wn 10
§5.2
幅相频率特性 ( Nyquist )(7)
谐振频率wr 和谐振峰值Mr
G 1
[1
w2 wn2
]2
[2
w wn
]2
d G 0
dw
d
dw
[1
w2 wn2
]2
[2
w wn
]2
0
2[1
w2 wn2
w ][2(wn2
)]
2
[ 2
w wn
2
](
wn
)
0
4w wn2
[1
w2 wn2
2
2]
0
w2 wn2
1 w 2T2 G arctanwT 180 arctanwT
-1
⑸ 一阶复合微分 G(s) Ts 1 G( jw) 1 jwT
G 1 w 2T2 arctanwT
G
180 arctan wT
§5.2
幅相频率特性 ( Nyquist )(6)
§5.2.1 典型环节的幅相特性曲线
典型环节的幅相频率特性 ⑴ G( jw) K ⑵ G( jw) jw ⑶ G( jw) 1 jw
⑷ G( jw) 1 ( 1 jwT)
-1 jwT jw
1
w2
w
2 n
j2
w wn
1
1
w2 wn2
j2
w wn
1 jwT
e-j w
⑸ G( jw) 1 jwT
⑹
G( jw ) 1
1
由|G(w0)|:
G(w0 )
w0 wn
3
K
2
2
2
1
3
2 102
G(s)
s2 2 1 10s 102
3
200 s2 6.67s 100
§5.2
幅相频率特性 ( Nyquist )(10)
不稳定振荡环节
G(s)
1
wn2 s2 2 wns wn2
G(s)
( s )2 2 s 1
§5.2
幅相频率特性 ( Nyquist )(12)
⑻ 延迟环节 G(s) e s
r(t) (t) c(t) k(t) (t )
R(s) 1 C(s) e s
G(s) C(s) e s R( s )
G( jw ) e jw
G 1
G w
§5.2
幅相频率特性 ( Nyquist )(13)
1
1 2
0.707
( 45)
0.707
( 45)
0 0.707
( 45 90)
0
( 90)
1 2 2 0 1 2 2 0 1 2 2 0
1 2 2 1
wr, Mr 不存在
wr 0
Mr 1
wr wn 1 2 2 wn
1
Mr 2
1
12
wr wn
Mr