三维运动平台控制系统的硬件设计【文献综述】
基于STM32的三维运动控制系统设计★
3收稿日期:2020-05-10*科研项目:四川现代职业学院科研项目(基于STM32单片机的三维运动控制系统研制与开发)(编号:K18-ZD1-007)作者简介:熊方(1981—),女,四川资阳人,硕士,副教授,研究方向:电子电路、自动控制。
0 引言运动控制器广泛应用于智能机器人、全自动焊接机、点胶机、电缆生产牵引系统等自动化设备中。
运动控制正朝着高速度、高精度、开放式的方向发展,国内外各大公司生产的运动控制器大多为通用型产品,普遍存在以下不足:功能强大、价格昂贵,在实际使用中往往只用到少数功能;封闭式的结构很难进行二次开发,灵活性较差[1]。
本文将介绍一种基于STM32的三维运动系统设计并进行实验验证,该设计简洁、运行稳定、易操作、便于二次开发。
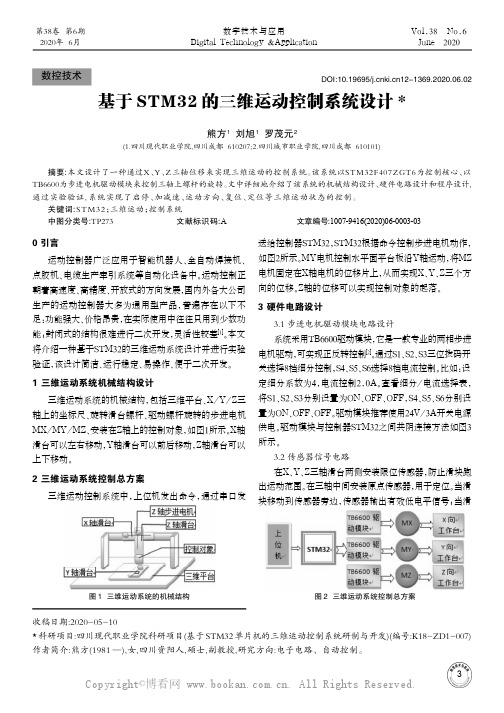
1 三维运动系统机械结构设计三维运动系统的机械结构,包括三维平台、X/Y/Z三轴上的坐标尺、旋转滑台螺杆、驱动螺杆旋转的步进电机MX/MY/MZ、安装在Z轴上的控制对象,如图1所示。
X轴滑台可以左右移动,Y轴滑台可以前后移动,Z轴滑台可以上下移动。
2 三维运动系统控制总方案三维运动控制系统中,上位机发出命令,通过串口发送给控制器STM32,STM32根据命令控制步进电机动作,如图2所示。
MY电机控制水平面平台板沿Y轴运动,将MZ电机固定在X轴电机的位移片上,从而实现X、Y、Z三个方向的位移。
Z轴的位移可以实现控制对象的起落。
3 硬件电路设计3.1 步进电机驱动模块电路设计系统采用TB6600驱动模块,它是一款专业的两相步进电机驱动,可实现正反转控制[2]。
通过S1、S2、S3三位拨码开关选择8档细分控制,S4、S5、S6选择8档电流控制。
比如:设定细分系数为4,电流控制2.0A。
查看细分/电流选择表,将S1、S2、S3分别设置为ON、OFF、OFF,S4、S5、S6分别设置为ON、OFF、OFF。
驱动模块推荐使用24V/3A开关电源供电。
驱动模块与控制器STM32之间共阴连接方法如图3所示。
三维运动模拟平台总体设计

三维运动模拟平台总体设计为实现对某型光电跟踪器的动态跟踪性能的测试,设计了一种可以实现方位、俯仰和垂直直线运动的模拟运动平台,角位置精度达到15″,线位置精度达到0.01mm。
标签:运动模拟;结构设计;机构设计1 引言动态角跟踪精度检测装置由被试系统、多波段点源目标发生器系统(以下简称“目标发生器”)、运动模拟平台及总控制系统四个部分组成,图1为动态角跟踪精度检测装置系统组成原理框图。
其中的运动模拟平台可以完成方位、俯仰和垂直直线运动。
2 目标运动平台目标运动平台包含圆弧导轨副(含驱动传动机构)、目标固定支撑台面(俯仰U型框)、俯仰/升降二维运动机构、平台三维(俯仰、升降及滑动)伺服驱动系统、平台运动控制系统等5部分组成,图2为运动平台组成框图。
导轨为目标平台的方位运动轨迹,围绕着圆弧导轨的圆心转动,形成方位视线角速度变化;目标固定支撑台面负载目标发生器在进行沿圆弧导轨水平运动的同时,通过俯仰和高低二维运动机构带动目标发生器进行自身的位置运动,形成复合俯仰方位视线角速度变化,进而模拟目标在空域范围内的位置信息,以便对被测系统进行测试及仿真。
2.1 运动平台功能平台本身具备三个运动自由度,目标发生器安放于运动平台的俯仰框上,平台依据操作者规划的运动路径,带动目标模拟系统形成相对被测试系统的方位、俯仰两个自由运动并保证目标光轴实时指向被测系统成像面中心,模拟真实环境下目标的运动特性,以便被测系统进行跟踪,分述如下。
2.1.1 模拟目标的方位运动整套设备在以GDX塔的转轴中心为圆心的圆弧导轨上运动,实现方位角度变化的模拟,由于被测系统及圆弧导轨都以GDX塔的转轴中心为圆心,可以实现旋转中心重合,所以可以保证目标在导轨上运动时,被测系统光轴可以始终跟随着目标发生器的光轴,且在某一视场可观测到多波段点源目标;2.1.2 模拟目标的俯仰运动升降机构为沿圆弧导轨运动的一套直线升降机构,带动目标发生器升降,与俯仰运动机构产生相应的俯仰视线角角度变化,以便测试时被被测系统对目标进行搜索或跟随。
三维运动平台控制系统的硬件设计【文献综述】

毕业设计开题报告电气工程及其自动化三维运动平台控制系统的硬件设计1前言部分三维运动平台控制系统是一套对空间X轴、Y轴、Z轴集中式智能化操作的控制系统。
目前市场的运动平台控制系统在性能指标和价格定位方面基本是面向中、高端用户,无法满足低端用户的需用。
因此研发一种面向于简单控制、低成本的三维驱动数控系统具有广泛的应用前景。
该系统作为现有加工方式的升级换代手段,替代传统手工操作,从而提高产品的加工精度和速度、保证生产的一致性和稳定性、降低运行成本。
本论文讨论的是三维运动平台控制系统的硬件设计。
三维运动平台是现代运动控制技术的基础实验设备,它在机械加工、工程测试、医疗等各种生产行业中都有极广泛的应用。
运动控制(Motion Control)是由电力拖动发展而来的,电力拖动或电气传动是对以电动机为对象的控制系统的通称。
随着电力屯子技术、微电子技术的迅猛发展,原有的电气传动控制的概念已经不能充分地概括现代自动化系统中承担第一线任务的全部控制设备。
因此,二十世纪八十年代后期,国际上开始出现运动控制系统(Motion Control System)这一术语。
一个运动控制系统的基本架构组成包括:一个运动控制器用以生成轨迹点(期望输出)和闭合位置的反馈环。
许多控制器也可以在内部闭合一个速度环。
一个驱动或放大器用以将来自运动控制器的控制信号(通常是速度或扭矩信号)转换为更高功率的电流或电压信号。
更为先进的智能化驱动可以自身闭合位置环和速度环,以获得更精确的控制。
一个执行器如液压泵、气缸、线性执行机或电机用以输出运动。
一个反馈传感器如光电编码器,旋转变压器或霍尔效应设备等用以反馈执行器的位置到位置控制器,以实现和位置控制环的闭合。
众多机械部件用以将执行器的运动形式转换为期望的运动形式,它包括齿轮箱、轴、滚珠丝杠、齿形带、联轴器以及线性和旋转轴承。
通常,一个运动控制系统的功能包括:速度控制点位控制(点到点)。
有很多方法可以计算出一个运动轨迹,它们通常基于一个运动的速度曲线如三角速度曲线,梯形速度曲线或者S型速度曲线。
基于单片机的三维电控位移平台控制系统设计
资源 , 因此系 统要 在 只有 一 个定 时器 和 较 少 端 口可
用 的情况 下 , 成对 三维 电控 平 台的控制 。 完
c ntols s e t t u e y a AT89 2。 t l o r y t m ha s d b C5 wih on y a f w fon—c p r s ur e , p e o r l po ii n e o hi e o c s s e d c nt o , sto lm ii g p ot c i n, t ., o hr e s e o or r i tn r e to e c f rt e t p m t swe e a h e e Se il v r i s e d c t o n p r le c i v d. ra a y ng p e on r l a d a a l l
维普资讯
基于单 片机 的三维 电控位移平 台 控 制 系统设 计
李 伟, 闫卫平 , 鹤楠 李 ( 大连理 工大 学 电子 与信 息工程 学院 , 宁 大连 1 6 2 ) 辽 10 3
De i f3— Di nso a e t i o i g S a e Co r lSy t m s d o ir c nto l r sgn o — me i n lEl c rc M v n t g nt o s e Ba e n M c o o r le
0 引 言
电动位 移 台( 简称 电移 台) 是依 靠步 进 电机 驱 动
的 一种执 行装 置 , 通 过丝 杠 将 步进 电机 的 角位 移 它 转换 成平 台的线性 移 动 , 台线 性移 动 的 距 离 和步 平 进 电机 的角 位移 量 成 正 比。因此 , 电移 台 的控 制 对 归根 结底 是 对 步进 电机 的控制 [ 。在此 采用 3个 1 ]
基于T-CPU和S120的三维运动控制系统

基于T-CPU和S120的三维运动控制系统汤海梅【摘要】Motion control system is widely applied in industrial automation system. It requires very high precision in positioning system. Motion control system not only implements quick positioning,but also reaches highly precision requirement. Motion control system elevates industrial automation to another level,and realizes the diversity and complexity of drive control functions. The production will be more flexible,the product quality will be improved,and the cost of equipments will be decreased. How to apply Siemens T-CPU and S120 drive control system and touch screen to execute precision positioning control to serve motor were introduced ,and drawing writing operation was completed.%运动控制系统在工业自动化中的使用越来越广泛,在定位上有着非常高的精度要求,能够实现快速定位的同时还能够达到相对较高的精度要求.只有这样才能使工业自动化提升到另一个层次,实现驱动控制功能的多样化和复杂性,使生产更灵活,并能提高产品质量和降低设备成本.采用西门子T-CPU,S120伺服驱动器和触摸屏对伺服电机进行精确定位控制,完成图形的绘画和字的书写.【期刊名称】《电气传动》【年(卷),期】2017(047)009【总页数】7页(P53-58,80)【关键词】技术型CPU;S120驱动控制器;触摸屏【作者】汤海梅【作者单位】天津中德应用技术大学智能制造学院,天津 300350【正文语种】中文【中图分类】TP271Abstract:Motion control system is widely applied in industrial automation system.It requires very high precision in positioning system.Motion control system not only implements quick positioning,but also reaches highly precision requirement.Motion control system elevates industrial automation to another level,and realizes the diversity and complexity of drive control functions.The production will be more flexible,the product quality will be improved,and the cost of equipments will be decreased.How to apply Siemens T-CPU and S120 drive control systemand touch screen to execute precision positioning control to serve motor were introduced,and drawing writing operation was completed.Key words:technology CPU;S120 drive control system;touch screen运动控制起源于早期的伺服控制,简单地说,运动控制就是对机械运动部件的位置、速度、力或者转矩进行实时的控制,使其按照预期的轨迹和规定的运动参数完成相应的动作。
运动平台控制系统设计
运动平台控制系统的设计总计毕业设计 29 页表格 3 个插图19 幅摘要在信息技术迅猛发展的今天,仍然改变不了机械制造业在国民经济的基础地位。
而作为机械中核心部分的控制系统,更是整个装置的灵魂。
而运动平台作为机械装置里的基本简易设备,更是一些数控加工装置上的基本部件,在科学研究领域里,也将其视为一种理想模型。
为了设计一个平台控制系统,文章中介绍了运动平台的当前现状、发展趋势以与它的组成部分,重点论述了控制电路的接线以与功能软件设计。
控制电路的正确连接,直接影响到机械与计算机的正常通讯,在控制电路中,伺服系统便是整个运动控制系统的基础。
关键词:制造业控制系统平台接线伺服系统't a , . a , a .a , , . , , . : ; ; ; ;目录摘要................................................... 错误!未指定书签。
........................................................ 错误!未指定书签。
第一章绪论............................................... 错误!未指定书签。
1.1运动控制发展现状..................................... 错误!未指定书签。
1.2 发展趋势............................................ 错误!未指定书签。
第二章运动平台控制概述..................................... 错误!未指定书签。
2.1 运动平台控制系统.................................... 错误!未指定书签。
2.2 系列运动控制器介绍.................................. 错误!未指定书签。
三维电动平台车自动控制系统
三维电动平台车自动控制系统【摘要】本文基于一种三维电动平台车系统,对该系统的自动化控制的实现,进行设计、软硬件配置及系统功能方面的详细阐述。
【关键词】PLC;自动定位;分段控制;CANOpen0.前言在火法冶金工艺中,铝热还原法是最常用的一种自蔓延反应,其反应的特点是速度快,热量高,且不需要外部施加额外的能源,但同时也对如何提高安全性提出了新的课题。
目前国际上比较常用的方法是通过破开熔融金属液上表面渣层的方式,将热量适度释放,以降低反应风险。
为了提高产能,并最大限度的保障人身与设备安全,在实际的工业生产过程中,需要将承载刚反应完的熔融金属液的坩埚及时运输到破渣室进行破渣,并马上准备下一个空坩埚进行下一个反应。
基于产能与安全的考虑,我们针对铝热还原法在实际工业生产中的工艺要求,设计并制作了具备自动定位功能的轨道式三维电动平台车。
该平台车由0.4KV供配电系统、顶升平台系统、东西向大车运行系统以及南北向小车运行系统组成,同时配有人机界面,分权限等级对系统参数进行设置。
轨道式电动车具有运行速度快且稳定、可靠性高、成本低等特点,在现代自动化物流系统领域中得到了越来越广泛的应用,该系统既可作为立体仓库的周边设备,也可作为独立系统[1]。
该系统运行机构定位误差小于5mm,完全满足现场工艺定位的要求。
1.设备构成1.1系统概要该电动平台车系统由38个工位组成,包括5个热反应室,3个破渣室,20个冷却工位和10个坩埚暂存工位,轨道上的平台车根据预设自动运行,并将需要的坩埚进行运输,如图1.1所示。
三维电动平台车的一次工作周期由从坩埚暂存区取空坩埚开始,经过运送坩埚加料反应、运送反应后的坩埚进行破渣、运送破渣后的坩埚进行冷却,最后将冷却后的坩埚运送回坩埚暂存区等待渣块分离,每一步骤完成后均需要进行三方向的位置定位与确认,以确保工序的准确和生产的安全。
该电动平台车主要由整车供电系统、整车电气控制系统、大车运行系统、小车运行系统、小车升降系统以及小车拖缆系统组成。
机器人控制系统设计(毕业设计)文献综述【范本模板】
(2)控制系统的硬件结构
通过小组初步讨论决定控制计算机使用研华的主机,运动控制卡选用ADT(深圳众为兴),电机选用伺服电机.
(3)控制系统的软件部分
主要采用VC进行编程,构建一个控制系统平台,在程序中给定坐标后,实现机械手从一点移动到另一点进行上下料的搬运工作。
之所以使用VC,一方面,ADT 的运动控制卡支持VC进行编程,另一方面,使用VC进行编程比较灵活,易于改进和变化。
(4)电路图部分
根据所选的硬件设备,使用Protel进行绘制.
三、作者已进行的准备及资料收集情况
在设计之前,翻阅了多篇关于机器人方面的书籍.对于控制系统的发展及其在机器人上的应用都有了相关的了解,这为建立机器人控制系统的模型做了一些前期准备工作.在此期间,还自学Protel和Solidworks等软件,为控制系统的电路设计和程序设计做好了准备。
还借了《单片机基础》、《48小时精通Solidworks2014》、《工业机器人》等书籍便于今后设计过程翻阅参考。
四、阶段性计划及预期研究成果
1.阶段性计划
第1周:阅读相关文献(中文≥10篇,英文≥1篇),提交文献目录及摘要。
第2周:翻译有关中英文文献,完成文献综述、外文翻译,提交外文翻译、文献综述.
第3~6周:控制系统总体设计,提交设计结果.
第7~11周:硬件元器件的选型、I/O口接线图,提交设计结果
第,12~14周:软件编程,装配图。
第15周:工程图绘制,工程图。
第16周撰写毕业设计说明书,提交论文,准备答辩。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
毕业设计开题报告电气工程及其自动化三维运动平台控制系统的硬件设计1前言部分三维运动平台控制系统是一套对空间X轴、Y轴、Z轴集中式智能化操作的控制系统。
目前市场的运动平台控制系统在性能指标和价格定位方面基本是面向中、高端用户,无法满足低端用户的需用。
因此研发一种面向于简单控制、低成本的三维驱动数控系统具有广泛的应用前景。
该系统作为现有加工方式的升级换代手段,替代传统手工操作,从而提高产品的加工精度和速度、保证生产的一致性和稳定性、降低运行成本。
本论文讨论的是三维运动平台控制系统的硬件设计。
三维运动平台是现代运动控制技术的基础实验设备,它在机械加工、工程测试、医疗等各种生产行业中都有极广泛的应用。
运动控制(Motion Control)是由电力拖动发展而来的,电力拖动或电气传动是对以电动机为对象的控制系统的通称。
随着电力屯子技术、微电子技术的迅猛发展,原有的电气传动控制的概念已经不能充分地概括现代自动化系统中承担第一线任务的全部控制设备。
因此,二十世纪八十年代后期,国际上开始出现运动控制系统(Motion Control System)这一术语。
一个运动控制系统的基本架构组成包括:一个运动控制器用以生成轨迹点(期望输出)和闭合位置的反馈环。
许多控制器也可以在内部闭合一个速度环。
一个驱动或放大器用以将来自运动控制器的控制信号(通常是速度或扭矩信号)转换为更高功率的电流或电压信号。
更为先进的智能化驱动可以自身闭合位置环和速度环,以获得更精确的控制。
一个执行器如液压泵、气缸、线性执行机或电机用以输出运动。
一个反馈传感器如光电编码器,旋转变压器或霍尔效应设备等用以反馈执行器的位置到位置控制器,以实现和位置控制环的闭合。
众多机械部件用以将执行器的运动形式转换为期望的运动形式,它包括齿轮箱、轴、滚珠丝杠、齿形带、联轴器以及线性和旋转轴承。
通常,一个运动控制系统的功能包括:速度控制点位控制(点到点)。
有很多方法可以计算出一个运动轨迹,它们通常基于一个运动的速度曲线如三角速度曲线,梯形速度曲线或者S型速度曲线。
电子齿轮(或电子凸轮)。
也就是从动轴的位置在机械上跟随一个主动轴的位置变化。
一个简单的例子是,一个系统包含两个转盘,它们按照一个给定的相对角度关系转动。
电子凸轮较之电子齿轮更复杂一些,它使得主动轴和从动轴之间的随动关系曲线是一个函数。
这个曲线可以是非线性的,但必须是一个函数关系。
运动控制器是以中央逻辑控制单元为核心、以传感器为信号敏感元件、以电机或动力装置和执行单元为控制对象的一种控制装置。
其功能在于提供整个伺服系统的闭路控制,如位置控制、速度控制和转矩控制等。
运动控制器的应用遍及众多领域,特别是在交流伺服和多轴控制系统中。
它能够充分利用计算机资源,方便地帮助用户实现运动轨迹规划、完成既定运动和高精度的伺服控制。
运动控制器可以分为三大类型:1.基于通用微处理器型。
以8031、8088等通用微处理器为核心器件,外加存储器、编码器信号处理电路及D/A转换电路等组成控制系统。
2.以专用芯片(ASIC)作为核心处理器的运动控制器。
常用的专用电机控制芯片有LM628、MAX314、HCPLIi00等,用一个芯片即完成速度曲线规划、PID伺服控制算法、编码器信号的处理等多种功能。
3.基于PC总线的以DSP和CPLD/FPGA作为核心处理器的开放式运动控制器。
以PC机作为信息处理平台,运动控制器以插卡形式嵌入PC机,即PC+运动控制器的模式。
其中运动控制器和运动控制卡是有区别的。
其一,运动控制器有独立的安装面板,有的是面板式的,有的是仪表型的,还有导轨安装型的!而运动控制卡,一般是PCI插槽的,或者是104板卡的,都必须安装在主机的主板上!其二是控制方式,虽然都是靠发脉冲来控制伺服或者步进,但是运动控制器的程序写入,大部分是在运动控制器上本身通过固有的编程方式,写程序,或者靠上位计算机传程序来执行下面的命令。
而运动控制卡比较广泛,只要给客户提供底层驱动和编程代码,客户可根据自己的软件开发能力做出各种适合的界面和功能!2主题部分运动控制起源于早期的伺服控制。
“伺服”一词最早出现在1873年法国工程师Jean Joseph Leon Farcot 的一本书Le Servo-Motor on Moteur Asservi。
该书中,Farcot 描述了在轮船引擎上由蒸汽驱动的伺服马达的工作原理。
H. Hazen 完成了伺服控制理论的基础研究,其结果发表在1934 年9 月的Franklin Institute 杂志上。
他设计的直流伺服电机在1932 年的芝加哥世界博览会上出现。
1940 年G.S. Brown 在MIT 创立了世界上第一个伺服机构实验室。
研究人员在G.S. Brown 的领导下,研制出了世界上第一台数控铣床(1952)。
随后,他们又研究开展了APT 以及计算机辅助设计的研究工作(1952-1969)。
1958年,Kearney & Trecker 开发了NC加工中心。
同年,日本富士通和牧野FRAICE公司开发成功NC铣床。
1961年,G. Devol 研制成功世界第一台机器人。
随后,被称为机器人之父的G.T. Engeleberger将其商业化,成立了世界第一家机器人公司Unimation。
1968年,日本Kawasaki公司从Unimation买进技术。
目前,Yaskawa公司已成为世界最大机器人公司。
机器人技术体现了运动控制和驱动,传感器以及运动机构一体化的新思想。
日本安川(Yaskawa)公司的工程师把这叫做机电一体化技术(Mechatronics)(1972)。
自1973年的石油危机以后,电气伺服成为市场主导。
随着微电子技术和微型计算机技术的发展,交流伺服日趋成熟。
为适应市场的多品种,小批量的需求,以计算机控制为核心的柔性制造系统(FMS),计算机/现代制造系统(CIMS)和工厂自动化(FA)技术应运而生(1975)。
为适应电子芯片制造的需求,机电一体化技术和运动控制技术被广泛应用于掩模对准(Mask Alignment),线焊(Wire Bonding),模具焊接(Die Bonding),微调成型(Trim Forming)等高速高精度的芯片制造设备中去。
运动控制系统的发展经历了从直流到交流,从开环到闭环,从模拟到数字,直到基于PC的伺服控制网络(Pc—Based sscNET)系统和基于网络的运动控制的发展过程。
具体来说大体经历了以下几个阶段:1.模拟控制系统:早期的运动控制系统一般采用运算放大器等分立元件以硬件连线方式构成,这种系统由于采用硬件接线方式可实现无限的采样频率,因此,控制器的精度较高且具有较大的宽带。
然而,与数字系统相比存在很多缺陷,如文件老化、环境温度的变化等。
2.以微控制器为核心的运动控制系统:这里的微处理器指的是8位或16位的单片机,系统电路比较简单。
微处理器一般采用冯一诺依曼总线结构,处理的速度有限,处理能力也有限;另外,单片机系统比较复杂,软件编程的难度较大。
同时,一般单片机的集成度较低,片上不具备运动控制系统所需要的专用外设,如PWM产生电路等。
系统仍然需要较多的元器件,这增加了系统电路板的复杂性,降低了系统的可靠性,也难以满足运算量较大的实时信号处理的需要,难以实现先进控制算法,如预测控制、模糊控制等。
3.在通用计算机上用软件实现的运动控制系统:在通用计算机上,利用高级语言编制相关的控制软件,配合驱动控制板、与计算机进行信号交换的接口板,就可以构成一个运动控制系统。
这种实现方法利用计算机的高速度、强大运算能力和方便的编程环境,可实现高性能、高精度、复杂的控制算法;同时,控制软件的修改也很方便。
然而,这种实现方式的一个缺点在于系统体积过大,难以应用于工业现场;而且,由于通用计算机本身的限制,难以实现实时性要求较高的信号处理算法。
4.利用专用芯片实现的运动控制系统:为了简化电动机模拟控制系统的电路,同时保持系统的快速响应能力,一些公司推出了专用电动机控制芯片,如Ti 公司的ucc3626,NOVA公司的MCx314等。
利用专用电机控制芯片构成的运动控制系统保持了模拟控制系统和以微处理器为核心的运动控制系统两种实现方式的长处,具有响应速度快、系统集成度高、使用元器件少、可靠性好等优点,是目前应用最广的一种运动控制系统实现方法。
然而,受专用控制芯片本身的限制,这种系统的缺点也是很明显的,主要包括:(1)由于已经将软件算法固化在芯片内部,虽然可保证较高的系统响应速度,但是降低了系统的灵活性,不具有扩展能力。
(2)受芯片制造工艺的限制,在现有的电动机专用控制芯片中所实现的算法一般都是比较简单的。
(3)由于用户不能对专用芯片进行编程,因此,很难实现系统的升级。
5. 以可编程逻辑器件为核心构成的运动控制系统:这种控制系统是将运动控制算法下载到相应的可编程逻辑器件中,以硬件的方式实现最终的运动控制系统。
系统的主要功能都可以在单片FPGA/CPLD器件中实现,减少了所需的元器件个数,缩小了系统体积。
由于系统以硬件实现,响应速度快,可实现并行处理。
而且开发工具齐全,容易掌握,通用性强。
尽管可编程逻辑器件可实现任意复杂的控制算法,但算法越复杂,可编程逻辑器件内部需要的晶体管门数就越多。
按照目前的芯片制造工艺,可编程逻辑器件的门数越多,价格就越昂贵。
因此,考虑到目标系统的成本,一般使用可编程逻辑器件实现较简单的控制算法,构成较简单的运动控制系统。
6. 以DSP控制器为核心构成的运动控制系统:DSP(Digtal sigal Ppocessing,数字信号处理)芯片既集成了极强的数字信号处理能力又集成了电机控制系统所必须的输入、输出、A/D变换、事件捕捉等外围设备的能力,时钟频率达到20MHz 以上,一个指令周期才50ns,而且一个周期可以同时执行几条指令。
指令大多设计为单周期多功能,如MAc一个周期就完成乘加运算。
DSP强大的运算功能使其在控制中得到了越来越广泛的应用,例如实时控制系统的实现主要基于采用DSP 的专用硬件设计。
许多公司研制了以DSP为微处理器的伺服控制卡,这些卡一般以IBMPc或兼容机为硬件平台,以DOS或Windows为软件平台,采用开放式手段,使用很方便。
DSP就是目前大部分人致力于研究,使PC机发挥更大的作用。
以PC机作为信息处理平台,运动控制器以插卡形式嵌入PC机,即PC+运动控制器的模式。
这样将PC机的信息处理能力和开放式的特点与运动控制器的运动轨迹控制能力有机地结合在一起,具有信息处理能力强、开放程度高、运动轨迹控制准确、通用性好的特点。
这类运动控制器通常都能提供多轴协调运动控制与复杂的运动轨迹规划、实时的插补运算、误差补偿、伺服滤波算法,能够实现闭环控制。