扭矩传感器样本
HBM_力和扭矩传感器中文样本
mVpp mApp
% %
<100 <0.1
v"0.2 v"0.5
Power supply Nominal (rated) supply voltage range Current consumption in measuring mode
+
4500 Ǹn
(n in rpm)
Rms value for the vibration velocity of the enclosure designated in VDI 2056
number
duration
acceleration (halfsine)
n ms m/s2
1000 3
650
Vibration resistance, test severity level per DIN IEC 68, Part 2-6: IEC 68-2-6-1982
frequency range
Oscillation width per DIN 50100 (peak-topeak)4)
%
80
2) Test severity / criterion: Industrial environment, cable length v30 m. Application not outside buildings. 3) Each type of irregular stress (bending moment, lateral or longitudinal force, exceeding nominal (rated) torque) can only be permitted up to its
扭矩传感器T20WN样本

扭矩传感器T20WN样本T20WN是一种扭矩传感器,被广泛应用于测量和监控扭矩的各种工业领域。
它采用了先进的技术和设计,具有高精度、高可靠性和高稳定性的特点。
本文将对T20WN扭矩传感器进行详细的介绍和分析。
首先,我们来了解一下T20WN扭矩传感器的基本特性。
该传感器采用了磁敏感元件和悬浮式测量系统,能够精确测量旋转轴上的扭矩。
它具有较宽的测量范围,可选范围从0.1Nm到2000Nm不等,以满足不同应用场合的需求。
此外,T20WN还具有较高的采样频率和快速响应能力,能够准确捕捉瞬态扭矩的变化。
其次,T20WN扭矩传感器具有优异的性能特点。
首先,它的量程范围广,可适应不同扭矩测量需求;其次,它的测量精度高,通常在0.1%~0.2%之间;再者,它的非线性误差小,通常不超过0.5%;此外,它还具有较低的温度漂移和零点漂移,可在不同环境条件下保持测量的准确性。
值得一提的是,T20WN还配备了数字接口,可以实现与计算机或其他设备的连接和数据传输,方便数据的存储和分析。
另外,T20WN扭矩传感器还具有良好的可靠性和稳定性。
其结构简单,没有机械接触部件,不易受到外界干扰和损坏。
同时,它采用了高品质的材料和先进的制造工艺,能够在恶劣环境下工作,并具有较长的使用寿命。
此外,T20WN的稳定性也得到了很好地保证,它具有较小的漂移和偏移,能够在长时间的使用过程中保持测量的准确性。
最后,我们来看一下T20WN扭矩传感器的应用领域。
由于其优异的性能和可靠性,T20WN被广泛应用于机械制造、汽车工业、飞机制造、冶金工业等领域中的扭矩测量和控制系统中。
例如,在机械制造中,T20WN可以用于测量和控制机械设备的扭矩,保证设备的正常运行和生产质量;在汽车工业中,T20WN可以用于测量汽车发动机的扭矩,用于故障诊断和性能优化;在飞机制造中,T20WN可以用于测量飞机发动机的扭矩,确保飞行安全和性能稳定等等。
综上所述,T20WN是一种先进的扭矩传感器,具有高精度、高可靠性和高稳定性的特点。
GB-DTS系列扭矩传感器说明书
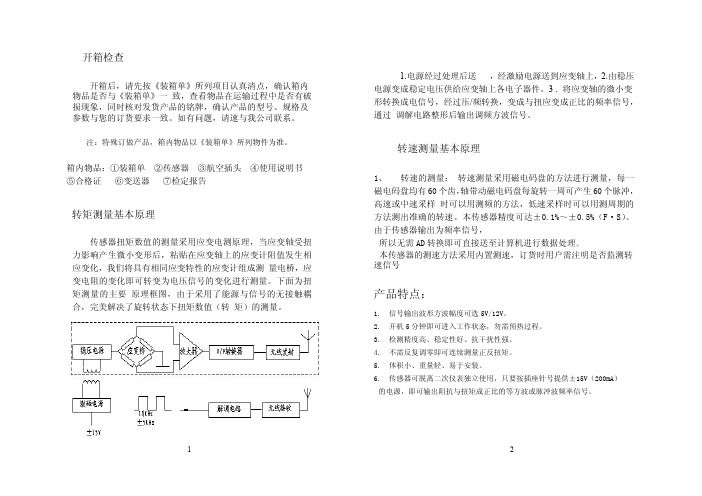
开箱后,请先按《装箱单》所列项目认真清点,确认箱内 物品是否与《装箱单》一 致,查看物品在运输过程中是否有破 损现象,同时核对发货产品的铭牌,确认产品的型号、规格及 参数与您的订货要求一致。如有问题,请速与我公司联系。
注:特殊订做产品,箱内物品以《装箱单》所列物件为准。
箱内物品:①装箱单 ②传感器 ③航空插头 ④使用说明书 ⑤合格证 ⑥变送器 ⑦检定报告
0-10;30; 18 85 8 50 122 31 61 100 50 108 186
50;100
200
28 92 8 72 123 41 61 100 56 125 208
500
38 106 8 72 127 55 61 108 66 136 238
1K
48 113 8 69 125 70 78 120 68 158 273
注:仪表使用请详细阅读数字式测量仪部分。
附图
♦ 联机的测试电缆线应妥善固定好,防止旋转系统将其绞断。 ♦ 测试电缆线的航空插头处的屏蔽线接点不应随意拆除。 ♦ 测试电缆线的航空插头与传感器及仪表的航空插座应拧紧可 靠。
未选用二次仪表时的使用方法
特别注意
♦ 为了避免触电,应使用三芯电源线与三线式电源插座联接进 行供电,三线式电源插座的中心地线必须可靠接地。
检查运行系统电参数
检查运行系统中的动力系统电压、传感器的供电电压是否在额 定值范围内。
定期保养、维护
用户根据使用要求、环境,可以半年或壹年对传感器进行一次 定期检查。 检查项目除日常保养、维护的内容外,还应对轴承清洗、加注
润滑油。
只有受过专业培训的人才能拆卸部件后进行维护及器件 更换。
9
10
30K 140 220 4-M12 88 146 150 193 240 140.2 281 452
HBM_力和扭矩传感器中文样本
MΩ
>1
Burden (current output)
with UB = 12 V
Ω
with UB = 24 V
Ω
Longterm drift over 48h
Voltage output
mV
Current output
mA
250 500
<"50 <"80
Cut−off frequency (−3 dB) (volt. output / current output)
Data Sheet
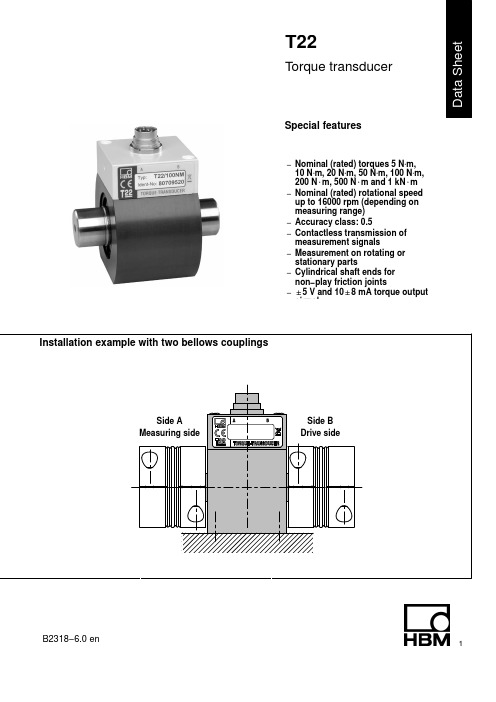
T22
Torque transducer
Special features
− Nominal (rated) torques 5 NVm, 10 NVm, 20 NVm, 50 NVm, 100 NVm, 200 N@m, 500 N@m and 1 kN@m
− Nominal (rated) rotational speed up to 16000 rpm (depending on measuring range)
%
%
kN
0.9
0.9
0.9
5 ... 65 1.5 50 12 000
2005)
> 280
1.6
1.6
1.6
9 000
4
4
Lateral limit force
N
25
45
90
210
420
850 1400 2800
Bending limit moment
N⋅m
0.5
0.9
1.9
5.5
11
22
54
应变式扭矩传感器简单设计报告
基于电阻应变式扭矩传感器与MSP430的扭矩测量系统设计2.应变式扭矩传感器2.1 金属应变计工作原理电阻应变片的工作原理是基于金属的应变效应[4]。
金属丝的电阻随着它所受的机械变形的大小而发生相应的变化的现象称为金属的电阻应变效应。
例如,一段金属丝的电阻R 与丝的长度L ,横截面A 有如下关系:LR Aρ= (2-1)若金属丝受到拉力F 作用伸长,伸长量设为l ∆,横截面积相应减少A ∆,电阻率的变化设为ρ∆,则电阻的相对变化量为:R l A R l A ρρ∆∆∆∆=-+(2-2)又因为对金属丝来说222,2,2A r r rA r A rdr A r rππππ∆∆∆=∆===于是有:2R l r R l r ρρ∆∆∆∆=-+(2-3)由材料力学知,弹性限度内材料的泊松系数为//r rl lμ∆=-∆,则有0(12)R l lK R l l ρμρ∆∆∆∆=++=(2-4)式中0/12/K l lρρμ∆=++∆为金属丝的灵敏度系数,它越大表明单位应变引起的电阻相对变化越大。
若令llε∆=为金属丝的轴向相对应变,则(12)RR ρρμεε∆∆=++(2-5)从上式可知,灵敏度系数受两个因素影响:一个是受力后材料的几何尺寸的变化,即12μ+;另一个是受力后材料晶格畸变引起电阻率发生的变化及ρρε∆。
对金属材料电阻丝来说,灵敏度系数表达式中12μ+的值要比ρρε∆大得多。
因此在相当的范围内,电阻的相对变化与金属丝的纵向应变ε成正比,也及金属丝有着不错的线性度。
2.2 扭矩测量原理弹性体是扭矩传感器的关键部件,它直接与被测对象接触(例如电机转轴)并引起应变片产生形变。
弹性轴在受到扭转时发生形变(如图),轴上会有应力和应变产生。
其横截面会受到一个剪应力,该剪应力按照直线规律变化,在轴的中心处为零,轴的表面达到最大[4]。
(1)弹性轴横截面剪应力(2)弹性走表面法向张力图2.1 弹性轴横截面与表面手里分析现在从弹性轴的径向表面上取一个单元进行研究,如图,在其与杆轴成45度与135度的斜面上,受到法向应力,此法向应力为主应力,其数值等于横截面上的剪应力τ[4]。
hbm扭矩传感器资料
HBM扭矩传感器德国扭矩传感器型号大全T12-100Nm,200Nm,500Nm,1kNm,2kNm,3kNm,5kNm,10kNmT40-200Nm最大到10kNmT10F-50Nm,100Nm,200Nm;500Nm,1kNm,2kNm,3kNm,5kNm and10kNm T10FH-100kNm,130kNm,150kNm,200kNm,250kNm,300kNmT10FM-15kNm,20kNm,25kNm,30kNm,40kNm,45kNm,50kNm,60kNm,70 kNm,80kNmT10FS-100Nm,200Nm,500Nm,1kNm,2kNm,3kNm,5kNm和10kNmT20WN-0.1Nm,0.2Nm,0.5Nm,1Nm,2Nm,5Nm,10Nm,20Nm,50Nm,100 Nm200NmT22-5Nm,10Nm,20Nm,50Nm,100Nm,200Nm,500Nm和1kNmT4A-5Nm,10Nm,20Nm,50Nm,100Nm,200Nm,500Nm和1kNmT5-10Nm,20Nm,50Nm,100Nm和200NmTB1A-100Nm,200Nm,500Nm,1kNm,2kNm,5kNm和10kNmTB2-100Nm,200Nm,500Nm,1kNm,2kNm,3kNm,5kNm和10kNmTN-100Nm,200Nm,500Nm,1kNm,2kNm,5kNm.10kNm和20kNm标准扭矩扳手TTS-100Nm,200Nm,500Nm,1kNm和3kNmT40B带有磁极转速测量系统的数字扭矩传感器高精度速度测量系统,即使在非常低的转速下T40B基于久经考验的T40扭矩传感器,并增加了新的功能。
其可以对转速进行测量,以及监控旋转的方向。
其通过内置一个脉冲计数器来完成以上功能。
可靠的转速测量系统T40B采用的磁学脉冲测量技术能够提供非常高的脉冲输出能力,可达1024脉冲/转,在T40B的所有量程:200Nm到10kNm均可提供。
扭矩传感器的原理及应用实验报告

扭矩传感器的原理及应用实验报告1. 引言本实验报告旨在研究和分析扭矩传感器的原理及其在实际应用中的效果。
通过对扭矩传感器进行实验测试,我们可以更深入地了解其工作原理和应用领域。
2. 实验目的本实验的主要目的是:•研究扭矩传感器的工作原理;•分析扭矩传感器在不同应用场景下的性能。
3. 实验设备本次实验使用的设备和材料如下:•扭矩传感器•电子称•示波器•运动控制系统•计算机4. 实验步骤实验过程中,我们采取以下步骤进行:1.将扭矩传感器安装到测试平台上;2.连接扭矩传感器与示波器,记录输出信号;3.设置不同的扭矩值,分别进行测试;4.记录并比较实验数据;5.分析实验结果。
5. 实验结果与分析根据实验数据,我们可以得到以下结论:•扭矩传感器在不同的扭矩值下具有较高的精确度;•扭矩传感器的输出信号与输入扭矩呈线性关系;•扭矩传感器在工作范围内具有较好的稳定性和重复性。
6. 应用领域分析通过本实验可以看出,扭矩传感器在许多领域中具有广泛的应用前景。
以下是扭矩传感器的一些常见应用场景:•工业生产:扭矩传感器可以用于监测机械设备的运行状态,确保生产过程的稳定性和安全性;•汽车工业:扭矩传感器可以用于检测汽车发动机的扭矩输出,提高发动机效率;•航空航天:扭矩传感器可以用于监测航空航天器件的转动情况,确保飞行安全。
7. 结论通过本次实验,我们深入了解了扭矩传感器的工作原理及其在实际应用中的表现。
扭矩传感器具有较高的精确度、线性关系、稳定性和重复性,因此在工业生产、汽车工业和航空航天等领域具有广泛的应用前景。
8. 参考文献•张三,李四。
《扭矩传感器原理与应用》。
科学出版社,2020年。
9. 致谢感谢实验中给予指导和支持的老师和同学们。
以上为扭矩传感器的原理及应用实验报告的基本结构和内容,通过对实验步骤、实验结果和应用领域的分析,我们能够更全面地了解扭矩传感器的工作原理和实际应用。
扭矩传感器T10F样本

扭矩传感器T10F样本Special features–Extremely short design–High permissible dynamic loads –High permissible transverse forces and bending moments –Very high torsional stiffness –Contactless–Selectable calibration signal –Integral speed measurement (option)Torque FlangeT10FInstallation exampleT10FRotor StatorConnecting elemente. g. MODULFLEX coupling Connecting element e. g. cardan shaft 23.T10F.101 enSpecifications2.)Factory settings version KF1 (no switching possible) HBM2D 23.T10F.101 en3D 23.T10FS.101 en HBM Specifications (Continued)4.)Each type of irregular stress (bending moment, lateral or axial load, exceeding the nominal torque) can only be permitted with its given static load limit if none of the others can occur. Otherwise the limit values must be reduced. If for instance 30 % of the bending limit moment and also 30 % of the lateral limit force are present, only 40 % of the axial limit force are permitted, provided that the nominal torque is not ex-ceeded. With the permitted bending moments, axial and lateral limit forces, measuring errors of about 1 % of the nominal torque can occur.5.)With T10F/50 N?m the nominal torque may be exceeded by 100 %, with T10F/100 N?m up to 10 kN?m the nominal torque may not be ex-ceeded.6.)Relative undulations within the range of the adapter flange in accordance with DIN 45670/VDI 2059.7.)See restricted values with speed measuring system.HBM4D 23.T10F.101 en5D 23.T10F.101 en HBMHBM6D 23.T10F.101 enSpecifications (Continued)Screw fitting of the rotor1)With optional speed module 14mm; due to intermediate flange 6mm longer screws must be used.7D 23.T10F.101 en HBMAccessories, to be ordered separately:423G –7S cable socket, 7-pole, straight cable entry, for torque output (connector 1, 3),order no. 3–3101.0247 423W –7S cable socket, 7-pole, 90° cable entry, for torque output (connector 1, 3),order no. 3–3312.0281423G –8S cable socket, 8-pole, straight cable entry, for speed output (connector 2), order no. 3–3312.0120423W –8S cable socket, 8-pole, 90° cable entry, for speed output (connector 2), order no. 3–3312.0282Raw cable Kab8/00–2/2/2, order no. 4–3301.0071Hottinger Baldwin Messtechnik GmbHPostfach 10 01 51, D-64201 Darmstadt Im Tiefen See 45, D-64293 DarmstadtTel.: +49/61 51/ 8 03-0; Fax: +49/61 51/ 8039100E –mail: ******************Modifications reserved.All details describe our products in general form only. They are not to be understood as express warranty and do not constitute any liability whatsoever.D 23.T10F.101 en。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
工作原理:传感器扭矩测量采用应变电测技术。
在弹性轴上粘贴应变计组成测量电桥,当弹性轴受扭矩产生微小变形后引起电桥电阻值变化,应变电桥电阻的变化转变为电信号的变化从而实现扭矩测量。
下面为扭矩测量的主要工作原理框图,由于采用了能源与信号的无接触传输,完美的解决了旋转状态下的扭矩测量。
电源当测速码盘连续旋转时,通过光电开关输出脉冲信号,根据码盘的齿数和输出信号的频率,即可计算出对应的转速。
技术指标:1.测量范围:0.5N·m--5万N·m(分若干档)2.非线性度:±0.1%--±0.3%(F·S)3.重复性:±0.1%--±0.2%(F·S)4.精度:±0.2%--±0.5%(F·S)5.环境温度:-40℃--70℃6.过载能力:150%7.频率响应:100 μs8.输出信号: 频率方波 (标准产品),也可以为4-20毫安电流或电压信号零扭矩: 10 KHz正向满量程: 15 KHz反向满量程: 5 KHz9.输出电平:5V (可以根据客户的要求作出调整),负载电流<10mA10.信号插座: (1)0. (2)+12V. (3)-12V. (4)转速. (5)扭矩信号. 11.绝缘电阻:大于200MΩ12.相对湿度:≤90%RH量程选择:转矩转速传感器的量程选择应以实际测量的最大转矩来确定,通常情况下应留有一定余量,防止出现过载以至于损坏传感器。
计算公式:M=9550*P/NM:转矩单位(牛.米)P:电机功率单位(千瓦)N:转速单位(转/分钟)如您使用的电机为三相感应电机,转矩量程应选择为额定扭矩的2-3倍,这是由于电动机的启动转矩较大的缘故。
型号选择C系列转速转矩传感器代号类型4 常规动态测试5 静态(适用于非旋转场合)6 小量程(10牛米以下)4A 为4型换代产品6A 为6型换代产品7 可以同时测量轴向力量程测量范围(NM)0.5 0—0.51 0—12 0—25 0—510 1—1020 2—2050 5—50100 10—100200 20—200300 30—300500 50—500700 70—7001000 100—10002000 200—20005000 500—500010000 1000—1000020000 2000—2000050000 5000—50000代号输出形式1 频率输出2 4-20mA3 电压输出代号精度等级A 0.2B 0.5C4型传感器本传感器为标准型传感器,适用于所有旋转动力系统扭矩的测量。
安装方式:1.使用两组联轴器将传感器安装在动力源和负载之间。
2.建议用挠性、弹性或万向节联轴器,以保证同心度∠0.1mm。
3.动力及负载设备必须固定可靠避免振动。
4.将本传感器的基座与设备的基座固定可靠,中心高须调节合适以避免产生弯矩。
负 载传感器动力源l外形主要尺寸表规格(N ·m)Φdj6 ΦDALL 1HhEBCF最高转速(r/min)C 型键(b ×L1×h ×数量)50 Φ18 Φ85 150 224 32 123 58 72 62 6.5 112 10000 6×32×6×1 100 Φ18 Φ85150224321235872626.5112100006×32×6×1200 Φ28 Φ95 152 242 42 133 63 72 62 6.5 121 10000 8×40×7×1 300 Φ28 Φ95 152 242 42 133 63 72 62 6.5 121 10000 8×40×7×1 500 Φ38 Φ105 154 272 57 144 69 72 62 6.5 136 10000 10×56×8×2 700 Φ38 Φ105 154 272 57 144 69 72 62 6.5 136 10000 10×56×8×2 1000 Φ48 Φ115 156 328 82 150 70 72 82 8.5 165 6000 14×80×9×2 2000 Φ55 Φ125 168 385 105 161 74 72 82 8.5 198 6000 16×100×10×2 5000 Φ75 Φ1461803961051878972828.5210600020×105×12×210000 Φ100 Φ182 180 447 130 244 122 80 112 10.5 230 6000 28×130×16×2 20000 Φ120 Φ208 180 520 165 280 150 90 150 10.5 260 1500 32×165×18×2 50000Φ165Φ250 20060020030015010015012.5300150040×200×22×2C4A型传感器为了适应一些特殊场合需要,我公司推出了一种体积更加小巧的扭矩传感器C4A型扭矩传感器,它适用于对体积和尺寸有严格要求的场合,同时它的安装更加方便快捷。
它是C4型的换代产品。
C4A型传感器选型尺寸图:规格(N·m) Φdj6 ΦD L L1 L2 L3 L4 L5 H B最高转速(rpm)C型键(b×l×h×数量)10 Φ12 Φ65 150 25 70 50 88 70 60 4 18000 4×25×4×1 50 Φ18 Φ70 170 32 70 50 94 70 65 6 15000 6×32×6×1 100 Φ18 Φ70 170 32 70 50 94 70 65 6 15000 6×32×6×1 200 Φ28 Φ80 190 42 70 50 94 70 70 8 11000 8×40×7×1 300 Φ28 Φ80 190 42 70 50 94 70 70 8 11000 8×40×7×1 500 Φ38 Φ90 220 57 70 50 94 80 80 10 8000 10×56×8×2 700 Φ38 Φ90 220 57 70 50 94 80 80 10 8000 10×56×8×2 1000 Φ48 Φ100 275 82 70 50 94 90 90 14 6500 14×80×9×2 2000 Φ55 Φ115 290 85 80 60 104 100 100 16 5000 16×100×10×2 5000 Φ75 Φ140 340 105 90 60 126 100 110 20 4000 20×105×12×2 10000 Φ100 Φ185 420 130 150 100 140 150 135 28 3000 28×130×16×2 20000 Φ120 Φ208 520 165 176 120 176 150 150 32 2000 32×165×18×350000 Φ165 Φ240 700 250 190 120 195 150 180 40 1500 40×200×22×2C5型传感器该型号传感器主要用于测量非旋转系统的转矩。
l外形主要尺寸表单位:mm规格(N·m) Φdh7ΦDΦD1ΦD2L L1L2a-Φd1(均布)b×l3×c×数量10 Φ10Φ62Φ76Φ90100 48 20 3-Φ5.53×16×3×120 Φ18Φ64Φ80Φ100119 55 30 3-Φ6.56×25×6×1 50 Φ18Φ64Φ80Φ100119 55 30 3-Φ6.56×25×6×1 100 Φ18Φ64Φ80Φ100119 55 30 3-Φ6.56×25×6×1 200 Φ28Φ72Φ90Φ105129 55 35 3-Φ8.58×30×7×2 300 Φ28Φ72Φ90Φ105129 55 35 3-Φ8.58×30×7×2 500 Φ38Φ82Φ100Φ120139 55 40 4-Φ10.510×35×8×2 700 Φ38Φ82Φ100Φ120139 55 40 4-Φ10.510×35×8×2 1000 Φ48Φ92Φ114Φ135173 55 57 6-Φ12.514×52×9×2 2000 Φ60Φ114Φ140Φ160200 55 70 6-Φ12.518×65×11×2 5000 Φ75Φ130Φ160Φ190263 55 102 6-Φ16.520×97×12×2 10000 Φ100Φ166Φ220Φ260321 55 130 8-Φ2128×125×16×2 20000 Φ120 Φ190 Φ250 Φ300 410 70 165 8-Φ26 32×165×18×2 50000 Φ165 Φ240 Φ300 Φ360 560 70 240 8-Φ32 40×240×22×2安装方式:将传感器一端固定在设备上,一端加扭矩。
C6型传感器C6型转矩传感器是C4转矩传感器的小量程形式:当量程小于10N·m时C4系列转矩传感器两端的支承轴承的磨擦力就成了不可忽略的干扰因素,C6型小量程转矩传感器在结构上与C4型转矩传感器的不同之处在于:避免了轴承磨擦力对测量结果的影响。