悬架设计理论
悬架设计指南
设计指南(弹簧、稳定杆)不管悬架的类型如何演变,从结构功能而言,它都是有弹性元件、减振装置和导向机构三部分组成。
一 弹性元件弹性元件主要作用是传递车轮或车桥与车架或车身之间的垂直载荷,并依靠其变形来吸收能量,达到缓冲的目的。
在现用的弹性元件中主要有三种;(1)钢板弹簧,(2)扭杆弹簧,(3)螺旋弹簧。
钢板弹簧设计板弹簧具有结构简单,制造、维修方便;除作为弹性元件外,还兼起导向和传递侧向、纵向力和力矩的作用;在车架或车身上两点支承,受力合理;可实现变刚度,应用广泛。
(一) 钢板弹簧布置方案1.1钢板弹簧在整车上布置(1) 横置;这种布置方式必须设置附加的导向传力装置,使结构复杂,质量加大,只在少数轻、微车上应用。
(2) 纵置;这种布置方式的钢板弹簧能传递各种力和力矩,结构简单,在汽车上得到广泛应用。
1.2 纵置钢板弹簧布置(1) 对称式;钢板弹簧中部在车轴(车桥)上的固定中心至钢板弹簧两端卷耳中心之间的距离相等,多数汽车上采用对称式钢板弹簧。
(2) 非对称式;由于整车布置原因,或者钢板弹簧在汽车上的安装位置不动,又要改变轴距或通过变化轴荷分配的目的时,采用非对称式钢板弹簧。
(二)钢板弹簧主要参数确定初始条件:1G ~满载静止时汽车前轴(桥)负荷2G ~满载静止时汽车后轴(桥)负荷1U G ~前簧下部分荷重2U G ~后簧下部分荷重1W F =(G 1-G 1U )/2 ~前单个钢板弹簧载荷2W F =(G 2-G 2U )/2 ~后单个钢板弹簧载荷c f ~悬架的静挠度;d f -悬架的动挠度1L ~汽车轴距;1、 满载弧高a f满载弧高指钢板弹簧装在车轴(车桥)上,汽车满载时钢板弹簧主片上表面与两端(不包括卷耳孔半径)连线间的最大高度差。
a f 用来保证汽车具有给定的高度。
当a f =0时,钢板弹簧在对称位置上工作。
为在车架高度已确定时得到足够的动挠度,常取a f = 10~20mm 。
2、 钢板弹簧长度L 的确定L —指弹簧伸直后两卷耳中心间的距离(1)钢板弹簧长度对整车影响当L 增加时:能显著降低弹簧应力,提高使用寿命;降低弹簧刚度,改善汽车平顺性;在垂直刚度C 给定的条件下,明显增加钢板弹簧纵向角刚度;减少车轮扭转力矩所引起的弹簧变形;原则上在总布置可能的条件下,尽可能将钢板弹簧取长些。
基于ADAMS的悬架系统动力学仿真分析与优化设计
基于ADAMS的悬架系统动力学仿真分析与优化设计一、概述本文以悬架系统为研究对象,运用多体动力学理论和软件,从新车型开发中悬架系统优化选型的角度,对悬架系统进行了运动学动力学仿真,旨在研究悬架系统对整车操纵稳定性和平顺性的影响。
文章提出了建立悬架快速开发系统平台的构想,并以新车型开发中的悬架系统优化选型作为实例进行阐述。
简要介绍了汽车悬架系统的基本组成和设计要求。
概述了多体动力学理论,并介绍了利用ADAMS软件进行运动学、静力学、动力学分析的理论基础。
基于ADAMSCar模块,分别建立了麦弗逊式和双横臂式两种前悬架子系统,多连杆式和拖曳式两种后悬架子系统,以及建立整车模型所需要的转向系、轮胎、横向稳定杆等子系统,根据仿真要求装配不同方案的整车仿真模型。
通过仿真分析,研究了悬架系统在左右车轮上下跳动时的车轮定位参数和制动点头量、加速抬头量的变化规律,以及汽车侧倾运动时悬架刚度、侧倾刚度、侧倾中心高度等侧倾参数的变化规律,从而对前后悬架系统进行初步评估。
1. 悬架系统的重要性及其在车辆动力学中的作用悬架系统是车辆的重要组成部分,对车辆的整体性能有着至关重要的作用。
它负责连接车轮与车身,不仅支撑着车身的重量,还承受着来自路面的各种冲击和振动。
悬架系统的主要功能包括:提供稳定的乘坐舒适性,保持车轮与路面的良好接触,以确保轮胎的附着力,以及控制车辆的姿态和行驶稳定性。
在车辆动力学中,悬架系统扮演着调节和缓冲的角色。
当车辆行驶在不平坦的路面上时,悬架系统通过其内部的弹性元件和阻尼元件,吸收并减少来自路面的冲击和振动,从而保持车身的平稳,提高乘坐的舒适性。
同时,悬架系统还能够根据车辆的行驶状态和路面的变化,自动调节车轮与车身的相对位置,确保车轮始终与路面保持最佳的接触状态,以提供足够的附着力。
悬架系统还对车辆的操控性和稳定性有着直接的影响。
通过合理的悬架设计,可以有效地改善车辆的操控性能,使驾驶员能够更加准确地感受到车辆的行驶状态,从而做出更为精确的操控动作。
汽车悬架对整车性能的影响
郑州电子信息职业技术学院毕业论文课题名称:________________________作者:________________________学号:________________________系别:________________________专业:________________________指导教师:________________________2010年第四章汽车悬架设计悬架是保证车轮或车桥与汽车承载系统(车架或承载式车身)之间具有弹性联系并能传递载荷、缓和冲击、衰减振动以及调节汽车行驶中的车身位置等有关装置的总称。
悬架最主要的功能是传递作用在车轮和车架(或车身)之间的一切力和力矩,并缓和汽车驶过不平路面时所产生的冲击,衰减由此引起的承载系统的振动,以保证汽车的行驶平顺性。
为此必须在车轮与车架或车身之间提供弹性联接,依靠弹性元件来传递车轮或车桥与车架或车身之间的垂向载荷,并依靠其变形来吸收能量,达到缓冲的目的。
采用弹性联接后,汽车可以看作是由悬挂质量(即簧载质量)、非悬挂质量(即非簧载质量)和弹簧(弹性元件)组成的振动系统,承受来自不平路面、空气动力及传动系、发动机的激励。
为了迅速衰减不必要的振动,悬架中还必须包括阻尼元件,即减振器。
此外,悬架中确保车轮与车架或车身之间所有力和力矩可靠传递并决定车轮相对于车架或车身的位移特性的连接装置统称为导向机构。
导向机构决定了车轮跳动时的运动轨迹和车轮定位参数的变化,以及汽车前后侧倾中心及纵倾中心的位置,从而在很大程度上影响了整车的操纵稳定性和抗纵倾能力。
在有些悬架中还有缓冲块和横向稳定杆。
尽管一百多年来汽车悬架从结构型式到作用原理一直在不断地演进,但从结构功能而言,它都是由弹性元件、减振装置和导向机构三部分组成。
在有些情况下,某一零部件兼起两种或三种作用,比如钢板弹簧兼起弹性元件及导向机构的作用,麦克弗逊悬架(McPherson strut suspension,或称滑柱摆臂式独立悬架)中的减振器柱兼起减振器及部分导向机构的作用,有些主动悬架中的作动器则具有弹性元件、减振器和部分导向机构的功能。
平衡悬架结构原理

震器吸收振动,悬挂臂则将车轮与车身连接起来。
悬挂系统的设计直接影响车辆的操控性能、乘坐舒适性和轮胎
03
磨损。
减震系统
减震系统是平衡悬架中的重要 组成部分,主要作用是吸收和 减少来自路面的冲击和振动。
它通常由减震器和阻尼器组成, 减震器负责吸收振动,阻尼器 则通过摩擦和热能转化来消耗 振动能量。
减震系统的性能直接影响车辆 的行驶平稳性和乘坐舒适性。
20世纪中叶,随着汽车工 业的发展,平衡悬架开始 被应用于部分高端车型。
现代发展
近年来,随着电子技术和 控制理论的进步,平衡悬 架的性能和智能化程度得 到了显著提升。
02
平衡悬架的结构组成
悬挂系统
01
悬挂系统是平衡悬架的重要组成部分,主要负责支撑车身并缓 冲来自路面的冲击。
02
它通常由弹簧、减震器和悬挂臂组成,弹簧提供弹性支撑,减
统连接在一起,传递力和运动。
02
车身连接系统的组成
车身连接系统通常由各种连杆、轴和轴承组成,它们协同工作以实现车
身连接功能。
03
车身连接系统的力学原理
在车身连接系统中,各种连杆、轴和轴承通过精确的配合和运动传递来
确保车轮与路面之间的正确接触,同时将来自路面的冲击和振动传递到
车身。
04
平衡悬架的性能分析
车身连接系统的设计直接影响车辆的 操控性能、乘坐舒适性和轮胎磨损。
它通常由轴、轴承和车轮轴承座等组 成,轴负责连接车轮和车身,轴承和 车轮轴承座则负责支撑和润滑。
03
平衡悬架的工作原理
悬挂系统的力学原理
悬挂系统的作用
悬挂系统是平衡悬架的重要组成部分,主要作用是连接车轮和车 身,缓冲来自路面的冲击,并保持车轮与路面之间的接触。
悬架构造实验报告(3篇)
第1篇一、实验目的1. 了解汽车悬架系统的基本组成和结构。
2. 掌握不同类型悬架系统的构造特点。
3. 分析悬架系统在汽车行驶中的作用。
二、实验原理汽车悬架系统是连接车架与车轮的部件,其主要功能是将路面传递给车轮的载荷和反作用力传递到车架上,以保证汽车的平稳行驶。
悬架系统由弹性元件、减振器和导向机构三部分组成。
三、实验内容1. 扭杆梁式悬架系统2. 麦弗逊式独立悬架系统3. 电子控制主动式油气弹簧悬架系统四、实验步骤1. 观察扭杆梁式悬架系统(1)观察悬架系统的整体结构,了解其组成。
(2)观察扭杆梁的形状和材料,了解其作用。
(3)观察减振器和弹簧的安装位置和结构,了解其作用。
2. 观察麦弗逊式独立悬架系统(1)观察悬架系统的整体结构,了解其组成。
(2)观察滑动立柱和横摆臂的形状和材料,了解其作用。
(3)观察减振器和弹簧的安装位置和结构,了解其作用。
3. 观察电子控制主动式油气弹簧悬架系统(1)观察悬架系统的整体结构,了解其组成。
(2)观察油气弹簧的结构和材料,了解其作用。
(3)观察传感器、电控单元和电磁阀的安装位置和作用。
五、实验结果与分析1. 扭杆梁式悬架系统扭杆梁式悬架系统通过扭杆梁来平衡左右车轮的上下跳动,以减小车辆的摇晃,保持车辆的平稳。
在实验中,我们观察到扭杆梁的形状和材料,以及减振器和弹簧的安装位置和结构,从而了解了扭杆梁式悬架系统的构造特点。
2. 麦弗逊式独立悬架系统麦弗逊式独立悬架系统由滑动立柱和横摆臂组成,具有较好的操控性和稳定性。
在实验中,我们观察到滑动立柱和横摆臂的形状和材料,以及减振器和弹簧的安装位置和结构,从而了解了麦弗逊式独立悬架系统的构造特点。
3. 电子控制主动式油气弹簧悬架系统电子控制主动式油气弹簧悬架系统由油气弹簧、传感器、电控单元和电磁阀等组成,可以实现悬架刚度和阻尼的调节。
在实验中,我们观察到油气弹簧的结构和材料,以及传感器、电控单元和电磁阀的安装位置和作用,从而了解了电子控制主动式油气弹簧悬架系统的构造特点。
汽车悬架系统动力学模型的研究
1 绪论随着社会的发展和文明的进步,汽车作为一种交通工具,已成为人们出行的主要选择,汽车乘坐的安全性、舒适性已成为世人关注的焦点。
汽车作为高速客运载体,其运行品质的好坏直接影响到人的生命安全,因此,与乘坐安全性、舒适性密切相关的轿车动力学性能的研究就显得非常重要。
悬架系统汽车的一个重要组成部分,它连接车身与车轮,主要由弹簧、减震器和导向机构三部分组成。
它能缓冲和吸收来自车轮的振动,传递车轮与地面的驱动力与制动力,还能在汽车转向时承受来自车身的侧倾力,在汽车启动和制动时抑制车身的俯仰和点头。
悬架系统是提高车辆平顺性和操作稳定性、减少动载荷引起零部件损坏的关键。
一个好的悬架系统不仅要能改善汽车的舒适性,同时也要保证汽车行驶的安全性,而提高汽车的舒适性必须限制汽车车身的加速度,这就需要悬架有足够的变形吸收来自路面的作用力。
然而为了保证汽车的安全性,悬架的变形必须限定在一个很小的范围内,为了改善悬架性能必须协调舒适性和操作稳定性之间的矛盾,而这个矛盾只有采用这折衷的控制策略才能合理的解决。
因此,研究汽车振动、设计新型汽车悬架系统、将振动控制在最低水平是提高现代汽车性能的重要措施[1][2]。
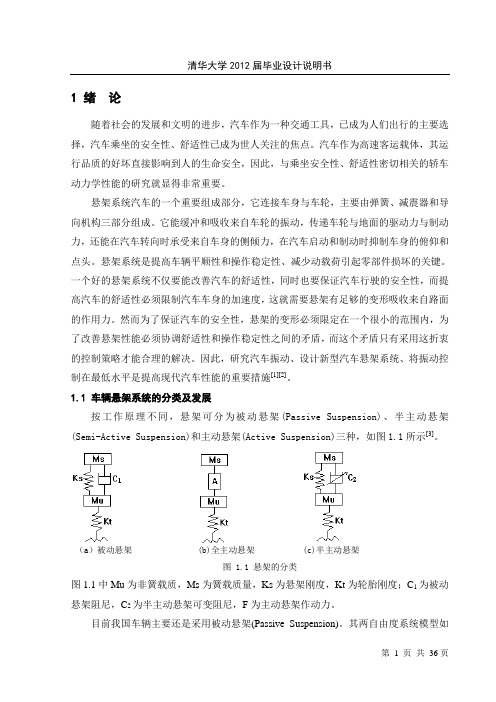
1.1 车辆悬架系统的分类及发展按工作原理不同,悬架可分为被动悬架(Passive Suspension)、半主动悬架(Semi-Active Suspension)和主动悬架(Active Suspension)三种,如图1.1所示[3]。
(a)被动悬架 (b)全主动悬架 (c)半主动悬架图 1.1 悬架的分类图1.1中Mu为非簧载质,Ms为簧载质量,Ks为悬架刚度,Kt为轮胎刚度;C1为被动悬架阻尼,C2为半主动悬架可变阻尼,F为主动悬架作动力。
目前我国车辆主要还是采用被动悬架(Passive Suspension)。
其两自由度系统模型如图1.1(a)所示。
传统的被动悬架一般由参数固定的弹簧和减振器组成,其弹簧的弹性特性和减振器的阻尼特性不能随着车辆运行工况的变化而进行调节,而且各元件在工作时不消耗外界能源,故称为被动悬架。
油气悬架技术研究现状及原理介绍

油气悬挂技术研究现状及原理介绍摘要:本文介绍了国内外在油气悬挂领域的研究现状,指出了目前国内技术水平与国外先进技术水平的差距。
详细论述了单气室油气悬挂系统的工作原理,并分析了油气悬挂结构参数对性能的影响规律,为油气悬挂结构设计提供了参考。
最后提出了今后国内在油气悬挂技术领域的研究方式和思路。
关键词:油气悬挂;工作原理;结构参数1 概述油气悬挂以气体(一般为惰性气体氮)作为弹性介质,而用油液作为传力介质。
它一般是由气体弹簧和相当于液力减震器的液压缸组成。
与传统悬挂相比,它具有良好的非线性刚度特性和非线性阻尼特性,能够最大限度满足车辆的平顺性要求。
同时储能比很大约为330000Nm/kg(以6Mpa氮气充气压力为例),重量比钢板弹簧轻50%,比扭杆弹簧轻20%,从而使它拥有了广阔的发展前景。
2 国内外研究现状[1]油气悬挂技术始于20世纪60年代后期Karnopp发明的油气减震器,它最先应用在德国和日本的重型车辆上,以后逐步推广应用到军用特种车辆及工程车辆上。
20世纪80年代,国外出现大量有关油气悬挂方面的发明专利,说明国外对油气悬挂技术的应用早已进入成熟阶段。
在理论方面,国外定性定量的研究工作已经开展得比较全面,对于如何进行结构参数的设计以及结构参数的变化如何影响油气悬挂的性能,应该说都有较好的研究成果,但由于涉及结构设计的关键环节,属于企业核心技术,所以很难看到相关的资料。
国内在油气悬挂技术研究方面起步较晚,直到80年代初期才真正有实际产品出现。
1984年上海重型汽车制造厂通过参考美国样机设计的油气悬挂应用到该厂的SH380、SH382矿用自卸车上,但使用效果较差;1992年徐州工程机械集团有限公司从德国利勃海尔公司引进了LTM1025、LTM1032、LTM1050全地面起重机,促进了油气悬挂技术的推广应用。
随后一些高校也开始进行油气悬挂技术的研究,北京理工大学、同济大学、大连理工大学、浙江大学、吉林大学等都从不同角度对油气悬挂进行研究分析。
主动悬架控制器算法及应用

轻 型汽 车技 术
21 ( ) 22 02 4 总 7
技 术纵横
1 3
直 接 控 制算 法 仅 需 测 量 悬 架 的相 对 速 度 和 相 对 位
广泛应用。 hm s 首先将随机最优控制理论应用 T o po n 于主动悬架 的研究 , 对线性最优控制算法有 以下几 点要求 :
F 一 主动悬架作用力 为 了使簧载质量具有理想 的隔振效果 ,只要主
动力 F 与被 动力 F 的大小 相 同 , 向相 反 , : 。 方 即
F= F= x+ x .- pk x 0 C(一 t (- x ) ( 2)
就可以完全消除簧载质量与非簧载质量之间的 耦合 效 应 , 为达 到理想 的隔振 效果 , 利用 直接 控 N(1 2 式, 得到 单轮 悬架 闭环系统 方 程为 :
好坏 , 对汽车的使用性能影响很大 。 悬架 弹性 系数 对行 驶平顺 性 的影 响 :当 弹性 系 数过大时, 悬架 的减振性能减弱 , 轮胎的振动直接传 递 到车 身 ;当弹性 系数 过小 时悬 架 系统 的 固有 振 动
频率 接 近路 面 的激 励频 率 , 容易 引起 车身共 振 。 阻 尼对 汽车 行驶平 顺 性 的影 响 :为衰 减 车身 的
尼 系数 。
这 种 算 法 的设 计 实 际 上是 滤波 器 结 构 的设 计
和滤波器上 下频率 的选择 。一般结论是上 限频率 高, 悬架对路面冲击的隔振效果好 , 但悬架 的动挠 度增 加 , 胎 的接 地 性能 差 , 之亦 然 , 限 频 率影 轮 反 下
2 可控 悬架
从上述分析我们知道悬架刚度、阻尼系数等悬 架 系统 的各项参 数 对车 辆 的行驶平 顺 性和操 纵 稳定
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2+ 2 Re Im 1 Im = tg ( ) Re r d ( jw ) / G r
宽平为优 以小为优 1
v v=
40 m / s
r / d 频率特性: —低速:增益平坦 相位滞后 —高速:增益高峰 低度频超前 相位 高频滞后
v = 10 m / s
2
20 40 60 80
6
2、悬架的运动学
2.1 车身稳态位移的一般分析
• 车身受有三种力(达朗贝尔概念)
Mg
1. 2.
重心处的重力与惯性力 导向杆系的导向力
3.
弹性元件的弹簧力
M g
Mg
ey
N1
Mg
P1
N2
N
P2
N3
N1
N2
7
• 等效系统,将弹簧力简化 到车轮接地点(杠杆比为 1) 处,目的: ━ 便于确定有效导向力的 方向与大小 ━ 初始弹簧力与重力抵消 ━ 便于由弹簧变形和轮距 (轴距)来确定车身位移
汽车悬架设计理论与相关技术
郭孔辉 雷雨成 2004 年 6 月
1
目
录
1、车轮定位 2、悬架的运动学、车身的侧倾与纵倾 3、轮荷转移 4、侧倾转向 5、侧向力转向 6、纵向力转向 7、轮胎特性与稳态转向特性 8、汽车操纵的瞬态响应
2
1、车轮定位
1.1 .车轮定位参数
车轮前束 车轮外倾 主销后倾 toe
Fy 2
– 轮胎侧偏特性的饱和
– 驱动力对饱和的影响 – 制动力分配d2 Nhomakorabea2
d2
41
轮胎特性与稳态转向特性
改善稳态转向特性的措施
– 前臵横向稳定器 – 后非独立悬架 Bs 2
– 后非独立悬架板簧下臵 – 后板簧前低后高 – 后非独立中心弹簧
– 老Benz的后悬架: h2,中心弹簧
42
轮胎特性与稳态转向特性 – ―随动转向”
PYZ
Y 1 Y 2
28
菱帅汽车后四杆悬架
29
菱帅汽车四杆式后悬架
—高不足转向的随动转向性能
虚拟主销
1
侧倾中心
PYZ1
P YZ 2
2 1
hw 中性面
PYZ1
PYZ 2
虚拟主销
2
纵倾中心
后拖距
30
3、轮荷转移分析
3.1、 纵向轴荷转移
在坡道上的轴荷转移 在驱动与制动时的轴荷 转移 高速时要考虑空气阻力
x
Z
横向单臂和斜单臂独立悬架
━ 侧倾转向性、等效臂长 ━ 铰轴的垂直分量
前独立悬架与转向杆系的干
涉转向
等效系统
多杆机构的杆涉转向
等效简化原理
34
5、侧向力转向
转向系弹性引起的附加转角 da = (Dx + xk Fy ) / Cs 导向系弹性引起的附加转向 独立纵臂与斜单臂后悬架的侧向力转向倾向 侧向力导致轮胎侧倾 Fy2 Fy1
b = vb C 2b v 2
L(1 + Kv 2 )
拉氏变换得传递函数
T1 =
v ( + b)C1 + (b + )C2 L C1C2 (1 + Kv 2 ) v 2 T2 = C1C2 (1 + Kv 2 )
45
二自由度角输入运动
频率特性:传递函数中令S=jω,其实部R e (w) 与虚部Im (w) 均为 w 的函数, 即实频特性与虚频特性: 幅频特性: Gr =
8
Mg
Mg
ey
N
• 弹簧力的确定
三种力相平衡 弹簧力必等于惯性力与导向力 的总和 对于等效系统确定了导向力 就等于确定了弹簧力 S1 确定了弹簧力就等于确定了 车身倾角(如果有横向稳定杆 要考虑之)
Mg
S2
Mg
ey
• 导向力的分解与“力矩中心”
导向力合力未必水平 在“中性面”处分解的意义: 车身的垂向平动与转动 S1
Bs
限制
Be
13
2.4 、其它导向机构 ( 侧倾)━等效单横臂概念“郭孔辉 刚化定理” 对称面 双横臂
PYZ
c
14
麦弗逊悬架侧倾中心
对称面
PYZ
c
15
斜臵单臂
r XZ
r YZ
后视
r XZ
Ux
侧视(等效)
r YZ
俯视
Ux
俯视(等效)
r YZ
Uy
Uy
16
复合式悬架侧倾中心
如果扭杆梁靠近前铰点独 立性好,但侧倾中心低
3 r= L 4
N 侧向反力作用线取决于吊耳、卷耳的刚性与弧高 一般在卷耳平均高度点与第一片中点之间,更靠
近卷耳高度,作为横向侧倾中心
纵向等效单臂,由车轮接地点运动学确定。
21
侧倾轴的倾角
━ 前低后高是因为前面是双横臂后面非独立
━尽可能提高侧倾中心
22
2.8、 结构比较与案例分析 独立悬架与非独立悬架的特点
– 后悬架的反稳定杆
43
8、汽车操纵动态响应的基本分析
二自由度角输入运动 (线性模型) 运动模型与座标
b XYZ固定于汽车重心
= y +b Y v d dt
y Py 2
Y
L
a
d1
v1
d
X
v
v2
d2 y
b
vx
Py1
+ r) v( b
a rd v b d2 = b r v d1 = b +
d = d n + da
Dx
xk
F
y
Fy
Fz
35
随动转向后悬架 — 逆向弹性转向 桑塔那的后悬架 富康的随动转向后悬架
Fy
Fy
36
6、纵向力转向
刹车转舵问题:r太大
盘式制动的优点
纵向力引起车轮侧倾
ABS引起的转向扰动 DYC引起的转向扰动 多杆悬架 制动时的板簧卷曲
37
ρ<0
S1 Z1
S2 N2 N1
12
Z2
2.3、侧倾性能小结
y 取决于 Cy与
y
ey
Be Bs
y = Cy
Cy Mgey 0
e y 0 M y
ke 2 ) 2 .B ( 独 立 悬 架 = ke 2 .B( ) e 非独立悬架 2
降低 ey的途径:降低 重心, 提高侧倾力矩中心 提高侧倾力矩中心的
dk
Fy
g
bk Dky
g
k
bk
x
k
Dkx
主销内倾
r
主销纵偏距 D kx 主销侧偏距 Dxy 主销拖距 轴距 轮距
x
k
Fyg
(外向) g (外张)
l B
r
M zg
主销地面侧偏距
3
1.2、车轮外倾与轮胎侧倾特性
外倾原因:―传统”,间隙,弹性,路 拱 外倾因载荷、制动与跳动而改变 轮胎侧倾特性:侧向力与反回正力矩
Mg
Mg
PX1
PZ1
PX2
PZ2
31
3.2、侧向轮荷转移
侧向轮荷转移的主要组成(
= 0 X
时)
━ 弹簧力转移(静不定问题 弹簧力转移取决于弹簧刚度分配,由弹簧变形计算) ━ 导向力转移(由作用在力矩中心处的侧向力计算) 在同时存在 当
Y
与
X
增大时 剧增大
ey
大的轴,轮荷转移加剧,会导致侧偏角急
绝对座标
侧偏角:
44
二自由度角输入运动
微分方程、传递函数
C1 = K1 / m1 , C2 = K 2 / m2
+ r) = (P + P ) mv(b y2 y1 = bPy 2 + aPy1 I Zr
其中
K=
1 1 1 ( ) L C1 C 2
v L(1 + Kv 2 ) b v 2 / C2
ρ
6、纵向力转向
制动时的板簧卷曲
造成制动转向
38
多杆随动转向后悬架
虚擬主肖 V
PxZ
━ 加大前拉杆的柔性, 使后轮在侧向 力作用下产生向内转向角 ━ 通过弹性转角来抵消侧偏角, Fy 以提高后轮有效侧偏刚度 ━ 可以设计虚擬主肖位臵,引起适当 的弹性转向以增进制动稳定性
Fx
.
39
7、轮胎特性与稳态转向特性
N N1
N2
S2
9
• ―纵倾中性面”的确定
a1 = k2 L k1 + k 2
Mg
中性面
Mg
Nh
NZ
K1
• 车身位移
M = C
N
a1
a2
K2
Z = N z / ki
其中:
M = Mg.e + mg.e
2 C = K1a1 + K 2b 2 1
10
2.2、 车身侧倾
通常对称面就是中性面 由单侧导向力方向可确定e y 0(整车)
ay
a* y
ay
40
轮胎特性与稳态转向特性 影响稳态转向特性的因素
{
d1 =1 +d c 1 +d r 1 d 2 = 2 +d c 2 +d r 2
Fy1
FZ1
d c1
d1
1 d r1
稳态转向特性转折的原因
1 d1
– C 1 / C 2 侧倾刚度比
dc2 + dr 2 – e1 / e 2 侧倾力矩中心高度 FZ 2 的 而 y – Dx 随 2