包装机械设计方案
哈工大机械原理课程设计_产品包装线(方案3)
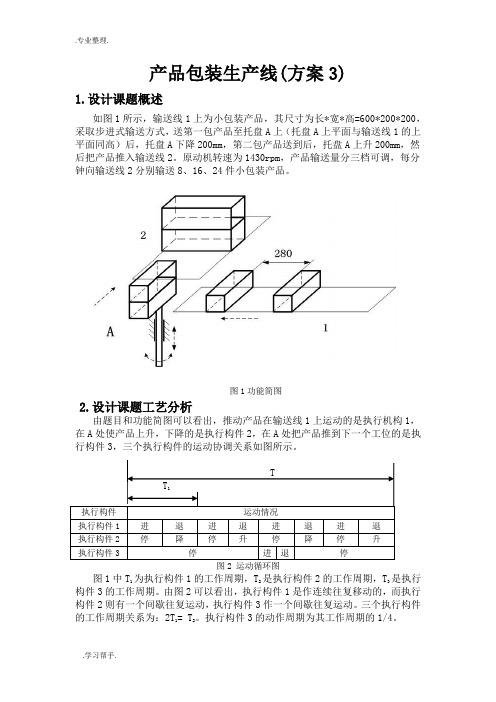
产品包装生产线(方案3)1.设计课题概述如图1所示,输送线1上为小包装产品,其尺寸为长*宽*高=600*200*200,采取步进式输送方式,送第一包产品至托盘A上(托盘A上平面与输送线1的上平面同高)后,托盘A下降200mm,第二包产品送到后,托盘A上升200mm,然后把产品推入输送线2。
原动机转速为1430rpm,产品输送量分三档可调,每分钟向输送线2分别输送8、16、24件小包装产品。
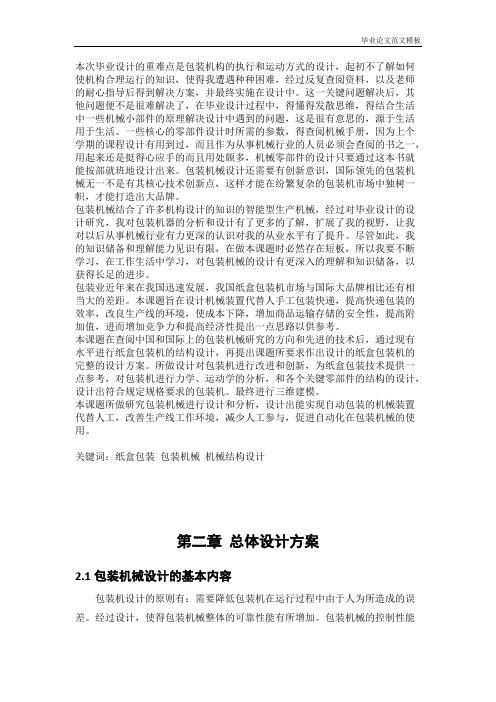
图1功能简图2.设计课题工艺分析由题目和功能简图可以看出,推动产品在输送线1上运动的是执行机构1,在A处使产品上升,下降的是执行构件2,在A处把产品推到下一个工位的是执行构件3,三个执行构件的运动协调关系如图所示。
图2 运动循环图图1中T1为执行构件1的工作周期,T2是执行构件2的工作周期,T3是执行构件3的工作周期。
由图2可以看出,执行构件1是作连续往复移动的,而执行构件2则有一个间歇往复运动,执行构件3作一个间歇往复运动。
三个执行构件的工作周期关系为:2T1= T2。
执行构件3的动作周期为其工作周期的1/4。
3.设计课题运动功能分析及运动功能系统图根据前面的分析可知,驱动执行构件1工作的执行机构应该具有运动功能如图3所示。
该运动功能把一个连续的单向转动转换为连续的往复移动,主动件每转动一周,从动件(执行构件1)往复运动两次,主动件的转速分别为4、8、12 rpm。
4、8、12 rpm图3 执行机构1的运动功能由于电动机转速为1430rpm,为了在执行机构1的主动件上分别得到4、8、12 rpm的转速,则由电动机到执行机构之间的传动比iz有3种分别为:i z1=14304=357.5i z2=14308=178.75i z3=143012=120总传动比由定传动比ic 与变传动比iv组成,满足以下关系式:i z1 = i c i v1i z2=i c i v2i z3=i c i v3三种传动比中iz1最大,iz3最小。
机械原理课程设计 书本打包机设计-全文可读
二、最小曲率半径
校核实际轮廓线的最小曲率半径时, 由ρa min +滚子半径r = ρmin得最 小曲率半径, 由高数公式ρ = (x2+y2)2/3/x’y” - x”y’, 并逐点求解得最小曲率半径 ρmin < [ρ]。
折边机构方案对比:
方案一:
方案二:
4.折边、折角机构
方案一的主要执行机构为 凸轮、连杆和摆杆机构, 通过 凸轮的回转运动, 带动连杆摆 动, 进而实现假肢杆件的间隙 闭合开启运动, 实现折上下边 的功能。
2.纵向推书机构
计算方法:
2.纵向推书机构
位置分析: 速度分析: 加速度分析:
送纸机构工作原理: 用皮带轮控 制另一个主动轮,按额定的转速转 动,通过不完全齿轮控制摩擦轮的 运动,当需要送
纸的时候使不完全齿轮与完全齿 轮相啮合,实线送纸,不需要时使 不完全齿轮的圆滑 面与齿轮相切, 实现优传缺纸点的: 机间构歇简。单,空间构件灵活,
3.裁纸机构
凸轮参数计算
3.裁纸机构
一、最大压力角
凸轮机构在运动过程中, 其压力角α是不断变化的 。为了观察机构压力角的变化情况, 以找出最大压 力角, 可对机构进行高副低代, 换成低副机构加以 观察。滚子中心可视为从动件尖端, 它与
理论轮廓线形成高副接触。 计算时可将某一位置时滚子中心与凸轮接触点的 曲率中心分别代以转动副铰接一个虚拟构件来代 替高副, 从而得到一个曲柄滑块机构。 经作图计算, 最大压力角为α=36.5°<[α]=30° ~38°
稳定性好,设计简单,精度有保证。但其 不完全齿轮加工复杂,成本高,工作时会 产生冲击,载荷不大,对机构整体的稳定 性影响不大。
3.送纸机构
3.裁纸机构
包装机械设计课程设计
包装机械设计 课程设计一、课程目标知识目标:1. 让学生理解包装机械设计的基本原理和概念,掌握包装机械的组成部分及各部分功能。
2. 使学生掌握包装机械设计中常用的设计方法和工程制图技巧,能够阅读并分析包装机械图纸。
3. 培养学生对包装机械系统的整体认识,了解不同包装机械在实际生产中的应用和选型。
技能目标:1. 培养学生运用CAD等软件进行包装机械零部件设计的能力,提高学生的实际操作技能。
2. 培养学生运用工程制图知识,绘制包装机械图纸,并进行合理的尺寸标注和工艺分析。
3. 培养学生运用所学知识解决实际包装机械设计问题的能力,提高学生的创新意识和团队协作能力。
情感态度价值观目标:1. 培养学生对包装机械设计学科的兴趣,激发学生的学习热情和探究精神。
2. 培养学生严谨、务实、创新的学习态度,使其具备良好的职业素养。
3. 增强学生的环保意识,使其在设计过程中充分考虑节能、环保和可持续发展。
本课程针对高年级学生,结合课程性质、学生特点和教学要求,将目标分解为具体的学习成果。
课程注重理论与实践相结合,以提高学生的实际操作能力和解决实际问题的能力为主要目标,为学生的未来职业生涯打下坚实基础。
二、教学内容1. 包装机械概述:介绍包装机械的定义、分类、应用领域和发展趋势,结合课本第一章内容,让学生对包装机械行业有全面的认识。
2. 包装机械设计原理:讲解包装机械设计的基本原理、设计方法和设计流程,以课本第二章为基础,使学生掌握包装机械设计的基本知识。
3. 包装机械主要部件及功能:分析包装机械的各个主要部件及其功能,结合课本第三章内容,让学生了解包装机械的组成结构。
4. 包装机械设计制图:教授包装机械设计制图的基本知识,包括图纸绘制、尺寸标注、工艺分析等,依据课本第四章内容,提高学生的制图能力。
5. CAD软件在包装机械设计中的应用:介绍CAD软件在包装机械设计中的应用,结合课本第五章内容,培养学生运用软件进行设计的能力。
设备包装方案
设备包装方案第1篇设备包装方案一、方案背景随着我国经济的快速发展,各类设备生产及销售业务日益繁荣,设备的包装问题逐渐成为影响产品质量和企业形象的重要因素。
为保障设备在运输、存储、使用等环节的安全,减少损失,提高客户满意度,制定一套合法合规的设备包装方案至关重要。
二、方案目标1. 确保设备在运输、存储、使用等环节的安全,降低损失风险。
2. 提高包装工作效率,降低包装成本。
3. 符合国家相关法律法规及标准要求,确保包装材料环保、可循环利用。
4. 提升企业形象,增强客户满意度。
三、方案内容1. 设备包装材料选择(1)根据设备特点及运输、存储环境,选择具有良好防护性能、耐磨损、抗拉强度高的包装材料。
(2)包装材料应符合国家相关环保法规,优先选择可循环利用的材料。
(3)包装材料供应商应具备相关资质,确保产品质量。
2. 设备包装设计(1)针对设备结构特点,设计合理的包装结构,确保设备在运输、存储、使用等环节的安全。
(2)包装设计应便于操作,提高包装工作效率。
(3)包装设计应考虑美观、简洁,体现企业形象。
3. 设备包装工艺(1)采用自动化、半自动化包装设备,提高包装工作效率。
(2)严格按照包装工艺流程操作,确保包装质量。
(3)定期对包装设备进行维护保养,保证设备正常运行。
4. 设备包装检验(1)制定包装检验标准,对包装质量进行严格把控。
(2)设立专门的包装检验部门,对包装过程进行全程监控。
(3)对包装不合格的产品进行返工,直至符合标准要求。
5. 设备包装运输与存储(1)根据设备包装特点,选择合适的运输方式和工具。
(2)制定合理的运输路线,确保设备安全、快速到达目的地。
(3)设备在存储过程中,应按照规定要求摆放,避免受潮、受污染。
四、方案实施与监督1. 成立专项小组,负责方案的实施与监督。
2. 制定详细的实施计划,明确责任人和完成时间。
3. 定期对方案实施情况进行检查,对存在的问题及时整改。
4. 对方案实施效果进行评估,持续优化包装方案。
纸盒包装机械结构设计.pdf
图(5)为“撤离”步骤。在完成上述步骤后,各个机构撤离以供给下一个 原料放置位置。至此纸盒折叠周期结束。
凸轮机构可以实现推动四块纸板折叠的过程,且能做到间歇运动,因此采
毕业论文范文模板
用凸轮机构。而在折叠过程中要实现翻转的步骤,可以拟采用连杆机构和电动 机控制机构。
综上所述,纸盒包装需要三个自由度的机械手,包装纸盒所需三个转动副 即可实现功能,在顶部装配一个可控的基座,驱动下面的部件,就能迅速把机 械手从前面转到后面。
3.3 凸轮—连杆机构的概要
凸轮机构是机械中的一种常用机构,由凸轮、从动件和机架三个基本构件 组成,通常用来将主动件(凸轮)的转动变为从动件的往复运动[6]。凸轮—连杆 机构较为简单基础,可以实现从动件任何想要的动作,所以被大量应用在各种 机械当中。
3.2.3 机械手的自由度
机械手的运动有整机的运动、本体的运动、臂部的运动、腕部的运动。每 一个运动的坐标成为一个自由度,几个机械手包含几个运动就是有几个自由度, 手爪的运动不算在自由度数量里[11]。
1. 整机的运动,机械手整体的运动成为整机运动[12]。 2. 本体运动,机械手本体部分所做的运动,如下图所示[13]。
毕业论文范文模板
驱动系统是机械手各个部件运动的动力来源。可以由气动驱动、液压驱动、 电力驱动和机械驱动。
(三) 控制系统 控制系统是给机械手下达命令,使机械手按照预定命令运动的装置。机械 手有保存信息的功能,还具有反馈机制,如果动作出错可以将错误位置和原因 发送给控制系统做出调整。 (四) 位置检测装置 位置检测装置可以把机械手的运行的位置反馈给控制系统,控制系统再将 反馈回来的信息进行调整处理[1]。使得机械手位置精度得以保证。 (五)辅助装置 1.基体——机械手的连接安装的基体部分,作为支撑用,其他部分安装在 基体上[1]。 2.油箱——存油和供油作用。 3.气缸——存储压缩气体[10]。
包装工程机械课程设计

包装工程机械课程设计一、课程目标知识目标:1. 让学生了解包装机械的基本概念、分类及工作原理;2. 掌握包装机械的常用部件及其功能,如输送、计量、封口、裹包等;3. 了解包装机械在食品、药品、日化等行业中的应用及发展趋势。
技能目标:1. 培养学生运用CAD等软件进行简单包装机械结构设计的能力;2. 培养学生通过查阅资料、团队协作解决包装机械工程问题的能力;3. 培养学生分析包装机械故障原因并提出改进措施的能力。
情感态度价值观目标:1. 培养学生对包装机械工程领域的兴趣,激发其探索精神和创新意识;2. 培养学生关注包装机械在环保、节能、可持续发展等方面的社会责任感;3. 培养学生具备良好的团队合作精神和沟通能力,树立正确的工程伦理观念。
课程性质:本课程为实践性较强的专业课,旨在培养学生运用所学知识解决实际问题的能力。
学生特点:高二年级学生,已具备一定的机械基础知识,具有较强的学习兴趣和动手能力。
教学要求:结合学生特点,注重理论与实践相结合,充分调动学生的主观能动性,提高学生的实际操作能力和工程素养。
在教学过程中,将课程目标分解为具体的学习成果,便于后续教学设计和评估。
二、教学内容1. 包装机械概述- 包装机械的定义、分类与发展趋势- 包装机械在国民经济中的作用2. 包装机械的常用部件及功能- 输送设备:皮带输送机、链式输送机等- 计量设备:电子秤、定量包装机等- 封口设备:热封机、高频封口机等- 裹包设备:枕式包装机、立式包装机等3. 包装机械应用案例分析- 食品行业:饼干包装机、饮料灌装机等- 药品行业:胶囊充填机、泡罩包装机等- 日化行业:洗发水灌装机、化妆品包装机等4. 包装机械设计原理与方法- 机械结构设计:CAD软件应用、部件选型等- 控制系统设计:PLC编程、人机界面设计等- 创新设计:绿色设计、智能化设计等5. 包装机械故障分析与改进措施- 常见故障原因:电气、机械、操作等- 故障诊断方法:观察、检测、数据分析等- 改进措施:设备优化、工艺改进、操作规范等教学安排与进度:按照教材章节顺序,结合课程目标,合理安排教学内容和进度。
包装机总体设计(包装机械课件)
第一节 包装机械设计的基本要求
一、包装机的功能和应用范围 功 能:包装机所能完成的包装工序的种类。 应用范围:包装不同物品的能力,包括包装物品的类型和包装材料的种类。
量精度等参数
第五节 总体方案设计的工艺分析
分析对比同类型不同设备的技术参数
计 根据生产条件、规模与物料消耗,配备设备并核算经营成本 算 务必遵循基本原则按具体条件加以具体分析,拟定技术参数 过 程 传动件的结构及其尺寸很大程度依赖于所设计计算的动力参数
动力参数过大,结构尺寸相应增大,否则经常处于超负荷状态
行机构头数、工作台面的宽度和高度、物件的输入高度、包装成品的输出高度 2. 运动参数
反映包装机的生产能力和执行机构的工作速度,如主轴转速、物件供送速度、计
量和充填速度等。 3. 动力参数
反映执行机构的工作载荷和包装机正常运转的能量消耗,如电机的额定功率、调
速范围、气体压力与流量等 4. 工艺参数
反映完成包装工序所用的工艺方法及其特性,如温度、压力、拉力、真空度、计
顺序(或称运动配合)的图表。工作循环图的表示方法有圆环型和直线型两种。
2. 包装机工作循环图的作用 工作循环图在包装机的设计过程中起着极其重要的作用,是装配和调试包装
机的依据。 (1)保证包装机的工作质量。 (2)为提高包装机的生产率提供可靠的依据。 (3)为设计各执行机构提供据。 (4)是装配和调试包装机的依据。
经济性:制造成本、功率消耗、使用寿命、维修方便、生产率高; 占地面积小、外形美观等
第二节 包装机械设计的步骤 包 装 机 设 计 总 体 框 图
机械原理课程设计-包装机推包机构运动方案设计
引言 (2)关键字:机构运动分析机构结构设计曲柄滑块 (2)一、设计题目:包装机推包机构运动方案设计 (3)1、设计题目 (3)2、设计数据与要求 (3)3、设计任务 (3)二、执行机构运动方案设计 (3)方案一 (3)方案二 (5)方案三 (6)三、传动方案的选择 (7)电机的的选择 (7)执行构件运动分析 (9)凸轮设计 (13)四、心得体会 (16)引言机械原理课程设计是使学生较全面、系统巩固和加深机械原理课程的基本原理方法的重要实践环节,通过此次设计,学生可以学习机构运动方案的确定,培养分析向设计机械能力,以及开发创新的能力。
以机械系统方案设计与拟定为结合点,进一步巩固和另深学生所学的理论知识。
明确课程设计目的、步骤,根据自己的设计题目对设计内容进行分析,确定输入,输出件运动型式(即功能原理分析)。
包装机推包机是一种包装机中不可缺少的一部分,它推送物品到达指定包装工作台,该机构取代了传统的人工移动物品,工作效率底的缺点,我所设计的推包机构推包,回程一体的全自动化功能其主要设计思路来自于对传统工艺分解然后按照相应功能的机构部件进行设计对比选定以及优化组合,综合利用凸轮的往复运动齿轮的传动运动,以及减速器的定植调速比的设定,利用A u t o C a d、m a t l a b等软件强大绘图功能和的编辑功能,把设计做得更加精准,更加可靠。
.关键字:机构运动分析机构结构设计曲柄滑块一、设计题目:包装机推包机构运动方案设计1、设计题目现需设计某一包装机的推包机构,要求待包装的工件1(见附图33)先由输送带送到推包机构的推头2的前方,然后由该推头2将工件由a 处推至b 处(包装工作台),再进行包装。
为了提高生产率,希望在推头2结束回程(由b 至a )时,下一个工件已送到推头2的前方。
这样推头2就可以马上再开始推送工件。
这就要求推头2在回程时先退出包装工作台,然后再低头,即从台面的下面回程。
因而就要求推头 2 按图示的abcdea 线路运动。
(完整word版)机械原理课程设计包装机推包机构运动简图与传动系统设计
西北工业大学机械原理课程设计说明书——包装机推包机构运动简图与传动系统设计指导老师:班级:学生姓名:学号:组员:目录一、设计题目和要求·3二、设计方案的选定·3三、机构的尺寸设计·81、曲柄滑块结构的尺寸计算··82、凸轮尺寸设计··9四、电动机的选择及传动方案的设计·101、电动机的选择·102、传动方案的设计·103、总装配件图·11五、设计小结·12六、参考资料·13七、组员任务分配·13一、设计题目和要求现需要设计某一包装机的推包机构,要求待包装的工件1(见图1-1)先由输送带送到推包机构的推头2的前方,然后由该推头2将工件由a处推至b处(包装工作台),再进行包装。
为了提高生产率,希望在推头2结束回程(由b至a)时,下一个工件已送到推头2的前方。
这样推头2就可以马上再开始推送工作.这就要求推头2在回程时先退出包装工作台,然后再低头,即从台面的下面回程。
因而就要求推头2按图示的abcde线路运动.即实现“平推—水平退回—下降—降位退回—上升复位”的运动.设计数据与要求:要求每5-6s包装一个工件,且给定:L=100mm,S=25mm,H=30mm。
行程速比系数K 在1。
2—1。
5范围内选取,推包机由电动机推动。
在推头回程中,除要求推头低位退回外,还要求其回程速度高于工作行程的速度,以便缩短空回程的时间,提高工效.至于“cdea”部分的线路形状不作严格要求.图1-1 运动要求图二、设计方案的选定1。
方案1用偏置滑块机构与凸轮机构的组合机构,偏置滑块机构与往复移动凸轮机构的组合(图2-1)。
在此方案中,偏置滑块机构可实现行程较大的往复直线运动,且具有急回特性,同时利用往复移动凸轮来实现推头的小行程低头运动的要求,这时需要对心曲柄滑块机构将转动变换为移动凸轮的往复直线运动.图2-1 偏置滑块机构与凸轮机构的组合机构图运动过程实现:用偏置滑块机构与凸轮机构的组合机构,偏置滑块机构与往复移动凸轮机构的组合(图2-1)。
半自动锁盖机的设计(包装机机械设计)
全日制普通本科生毕业设计半自动锁盖机的设计DESIGN OF SEMI AUTOMATIC CAPPING MACHINE学生姓名:学号:年级专业及班级:指导老师及职称:提交日期:2011年5月目录摘要 (1)关键词 (1)1前言 (1)1.1 包装机械的概念、特点、作用和分类 (2)1.1.1包装机械的概念 (2)1.1.2 包装机械的特点 (2)1.1.3 包装机械的作用 (2)1.1.4 包装机械的分类 (3)1.2 包装机械的发展 (5)1.2.1 包装机械的发展简史 (5)1.2.2 我国包装机械的概况 (5)1.2.3 我国包装机械产业面临的问题 (7)1.2.4 我国包装机械产业的发展方向 (7)1.3 本课题研究的意义 (8)2 半自动锁盖机的研制方案 (8)2.1 半自动锁盖机的要求 (8)2.2 方案的选择 (8)2.2.1 锁盖机的工作原理 (8)2.2.2 卷边滚轮的运动分析 (10)2.2.3 卷封机构的结构分析 (10)3 结构设计 (11)3.1 传动部分的设计 (11)3.2 锁盖部分的设计 (13)3.3 瓶身支撑部分的设计 (14)4 各部分结构的计算与校核 (15)4.1 轴承的校核 (15)4.2 键的校核 (18)4.3 轴的校核 (19)5 结论 (21)参考文献 (22)致谢 (22)半自动锁盖机的设计摘要:锁盖机是包装机械的一种,在食品、药物等生产中起着重要的作用。
本课题所设计的锁盖机,主要针对于金属罐的卷边封口锁盖。
它采用电机作为动力源,使用V带传动和齿轮传动相结合的动力传递方法,选取凸轮实现双滚轮的径向进给,分先后两次对金属罐体和罐盖的凸缘进行卷合,从而实现金属罐的锁盖密封。
本机操作简单,结构紧凑,具有一定的市场潜力及应用价值。
关键词:锁盖机;包装机械;卷边;凸轮;双滚轮Design of Semiautomatic Capping MachineAbstract:Capping machine is a kind of packaging machinery, food, medicine and other production plays an important role. The project is designed to close the lid machine, mainly for sealing metal cans lock crimp cover. It uses the motor as a power source, use the V belt drive and gear drive power transmission method combination, select the dual roller cam radial feed, divided twice lid on the metal flange of the tank and the volume together, In order to achieve the lid sealed metal cans. The machine is simple, compact, has a market potential and value.Key words:Capping Machine;Packaging Machine;Crimping;Cam;Double-roller1前言包装是根据物体的性能,用适当的材料,容器,施以保护物品的技术。