控制系统的结构分解.
《自动控制原理》线性定常系统的线性变换及结构分解 (2)

y = 0
2
1
xc x
c
3.系统按可观测性得结构分解
系统按可观测性结构分解的所有结论,都对偶于系统按可控性
结构分解的结果。设不可观测系统的动态方程为
•
x = Ax + Bu, y = Cx
(9-201)
其中,x为n维状态向量;u为p维输入向量;y为q维输出向量。系统
得可观测性矩阵为
C
V
=
CA
xcTo
xT co
xT co
xT co
,相应地使原动态方程中的A, B,C 矩阵变换成某种标
准构造的形式。
结构分解的过程或方法可先从整个系统的可控性分解开始,将可控
与不可控的状态变量分离开,继而分别对可控和不可控子系统进行
可观测性分解,便可以分离出四类状态变量及四类子系统。当然,
结构分解的过程也可以从系统的可观测性分解开始。下面着重介绍
整个系统的输出响应
y(t)
均与不可控子系统的状态
x c
有关。
3)由于选取非奇异变换阵 P−1 的列向量s1, s2 ,, sr 及sr+1,, sn的非惟 一性,虽然系统可控性规范分解的形式不变,但诸系数阵不相同, 故可控性规范分解不是惟一的。 设一个可控性规范分解系统为( A, B,C ),(书Ver6没有)
xco
可控
可观
x
co 可控 不可观
x co
不可控
可观
x co
不可控
不可观
由对应状态变量构成的子空间也分为四类,因而系统也对应分成了四
类子系统,称为系统的结构分解,也有的参考文献称此为系统的规范分解。
研究结构分解可以更明显地揭示系统的内部结构特性和传递特性。
自动控制原理控制系统的结构图

比较点后移
R(s)
G(s)
比较点前移
+
Q(s)
C(s)
R(s)
+
C(s) G(s)
比较点后移
Q(s)
R(s)
+
C(s) G(s)
Q(s)
C(s) R(s)G(s) Q(s)
[R(s) Q(s) ]G(s) G(s)
R(s)
C(s) G(s)
+
Q(s)
G(s)
C(s) [R(s) Q(s)]G(s)
R(s)G(s) Q(s)G(1s6 )
(5)引出点旳移动(前移、后移)
引出点前移
R(s)
G(s)
分支点(引出点)前移
C(s) C(s)
引出点后移
R(s)
G(s)
R(s)
分支点(引出点)后移
R(s)
G(s)
C(s)
G(s)
C(s)
C(s) R(s)G(s)
G(s) R(s)
C(s) R(s)
将 C(s) E(s)G(s) 代入上式,消去G(s)即得:
E(s) R(s)
1
H
1 (s)G(s)
1
1 开环传递函数
31
N(s)
+ E(s)
++
C(s)
R(s)
G1(s)
G2 (s)
-
B(s)
H(s)
(1)
打开反馈
C(s) R(s)
1
G(s) H (s)G(s)
前向通路传递函数 1 开环传递函数
注意:进行相加减旳量,必须具有相同旳量纲。
X1 +
+
X1+X2 R1(s)
DCS的体系结构及构成
电气监控系统
• FSSS furnace safeguard supervisory system 炉膛安全监控系统
• BMS burner management system 燃烧器管理系统
• SOE sequence of event recorder 事件顺序记录仪
• MFT main fuel trip
4、热控常用术语缩写:
• DCS distributed control system
分散控制系统
• DAS data acquisition system
数据采集系统
• SCS sequence control system
顺序控制系统
• ECS electrical control system
工业总线I/OBus 10Mb/s Modbus+
现场总线F-Net 1Mb—10Mb/s IEC802.3u,第三方协议
信息管理级
中央监控级
过程控制级 现场设备级 传感器,执行器级
2.2 过程控制级 过程控制级主要由现场控制站DPU(Distributed Control Unit)和I/O数
据采集站构成。一般在电厂中,把现场控制站和数据采集站集中安装在位于主 控室后的电子设备室中。
•
逻辑加法器
•
High/Low Limiter
•
高/低限幅
•
Time Function Generator
•
时间函数发生器
•
High Selector
•
高选
•
Low Selector
•
低选
•
High Signal Limiter
•
DCS控制系统的级成结构

DCS 控制系统的级成结构摘要: 从DCS 控制系统的级成结构看可以分为三大部分:带I/O 部件的控制器、通讯网络和人机接口(HSI)。
控制器I/O 部件直接与生产过程相连,接收现场设备送来的信号;人机接口是操作人员与DCS 相互交换信息的设备;通讯网络将控制器和人机接口联...从dcs 控制系统的级成结构看可以分为三大部分:带I/O 部件的控制器、通讯网络和人机接口(HSI)。
控制器I/O 部件直接与生产过程相连,接收现场设备送来的信号;人机接口是操作人员与DCS 相互交换信息的设备;通讯网络将控制器和人机接口联系起来,形成一个有机的整体。
早期的DCS 系统的通讯网络都是专用的,DCS 有几级网络,完成不同模件之间的通讯。
从目前的情况来看,DCS 的最多网络级有四级,它们分别是I/O 总线、现场总线、控制总线和DCS 网络。
I/O 总线,它把多种I/O 信号送到控制器,由控制器读取I/O 信号。
这称为I/O 总线。
I/O 板相互之间并不交换数据。
I/O 总线的速率是不高的。
从几十K 到几兆不等。
这与计算机技术的发展情况有关。
80 年代初是20K,80 年代中期是40K、80 年代末期是80K,90 年代是几兆。
为了快速,最好是并行总线。
采用并行总线,其I/O 模件必需与控制器模件相邻。
采用串行总线的情况下,I/O 板和控制器之间的距离也要比较近才行。
最好把控制器模件和I/O 模件装在一个机柜内或相邻的机柜内。
远程I/O 应该采用现场总线。
如CAN、LONWORKS、HART 总线等。
现场总线是90 年代初发展起来的。
在I/O 板中从硬件来说应该有能接收现场总线来的信号的输入、输出板。
从软件来说在控制器中应该有读取和写到现场总线信号的功能块。
在DCS 系统中,远程I/O 采用HART 总线比较多。
比如现场的变送器,离控制器机柜距璃比较远,把16 个变送器来的信号编成为一组,用HART 总线把信号送到控制器,空制器同时读进16 个变送器来的信号。
dcs的结构组成

dcs的结构组成【原创实用版】目录1.DCS 的定义与应用2.DCS 的结构组成3.DCS 的主要功能4.DCS 的发展趋势正文1.DCS 的定义与应用分布式控制系统(Distributed Control System,简称 DCS)是一种计算机控制系统,广泛应用于工业生产过程、设备运行管理等领域。
DCS 通过将控制功能分散到各个子系统,实现对整个工艺过程的集中监控、操作和管理。
相较于传统的集中式控制系统,DCS 具有更高的可靠性、实时性和灵活性。
2.DCS 的结构组成DCS 的结构组成主要包括以下几个方面:(1)管理层:管理层主要包括操作员站、工程师站和主管站。
操作员站负责实时监控生产过程,工程师站负责系统配置和维护,主管站则负责对整个系统的运行进行监督和管理。
(2)控制层:控制层主要包括各种控制模块、PID 控制器和逻辑控制器。
控制模块负责实现对现场设备的实时控制,PID 控制器负责对控制过程进行调节,逻辑控制器则负责实现各种复杂的控制逻辑。
(3)现场设备层:现场设备层主要包括各种传感器、执行器和现场总线设备。
传感器负责采集现场数据,执行器负责实现对设备的动作控制,现场总线设备则负责实现各个设备之间的数据通信。
3.DCS 的主要功能DCS 的主要功能包括:实时控制、过程监控、报警管理、数据记录、趋势分析、设备维护等。
通过这些功能,DCS 能够实现对整个生产过程的自动化管理,提高生产效率和产品质量。
4.DCS 的发展趋势随着科技的不断发展,DCS 也在不断地更新换代。
未来的 DCS 将更加智能化、网络化和一体化。
具体表现在以下几个方面:(1)智能化:未来的 DCS 将具备更强大的人工智能,能够自主学习和优化控制策略。
(2)网络化:DCS 将与企业内部的其他信息系统实现无缝集成,实现数据的共享和交流。
(3)一体化:DCS 将与生产设备的设计、制造和运行等环节实现紧密结合,形成一个完整的产业链。
自动控制原理 控制系统的结构图

12
(1)串联连接
R( s )
U (s) 1
G (s) 1
G (s) 2
C( s )
R(s)
C(s)
G(s)
(a)
(b)
特点:前一环节的输出量就是后一环节的输入量
U1(s) G1(s)R(s) C(s) G2 (s)U1(s) G2 (s)G1(s)R(s)
注意:进行相加减的量,必须具有相同的量纲。
X1 +
+
X1+X2 R1(s)
-
R1(s)R2(s)
X1
X2
R2(s)
X3
X1-X2 +X3 -
X2
4
(4) 引出点(分支点、测量点) 表示信号测量或引出的位置
R(s)
G (s) 1
X(s)
G (s) 2
C(s)
X(s) 引出点示意图
注意:同一位置引出的信号大小和性质完全一样
G(s)
分支点(引出点)前移
C(s) C(s)
引出点后移
R(s)
G(s)
R(s)
分支点(引出点)后移
R(s)
G(s)
C(s)
G(s)
C(s)
C(s) R(s)G(s)
G(s) R(s)
C(s) R(s)
C(s) R(s)
G1(s)G2
(s)
G(s)
结论:
n
G(s) Gi (s) n为相串联的环节数 i 1
串联环节的等效传递函数等于所有传递函数的乘积
13
(2)并联连接
G1 (s)
ITCC系统,tricon控制系统硬件说明
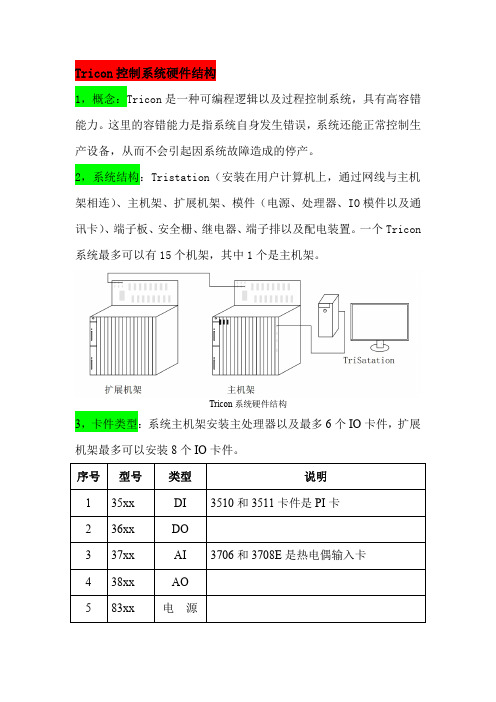
Tricon控制系统硬件结构
1,概念:Tricon是一种可编程逻辑以及过程控制系统,具有高容错能力。
这里的容错能力是指系统自身发生错误,系统还能正常控制生产设备,从而不会引起因系统故障造成的停产。
2,系统结构:Tristation(安装在用户计算机上,通过网线与主机架相连)、主机架、扩展机架、模件(电源、处理器、IO模件以及通讯卡)、端子板、安全栅、继电器、端子排以及配电装置。
一个Tricon 系统最多可以有15个机架,其中1个是主机架。
Tricon系统硬件结构
3,卡件类型:系统主机架安装主处理器以及最多6个IO卡件,扩展机架最多可以安装8个IO卡件。
序号型号类型说明
135xx DI3510和3511卡件是PI卡
236xx DO
337xx AI3706和3708E是热电偶输入卡
438xx AO
583xx电源
63008处理器执行程序并对输入和输出进行表决
4,系统工作过程:Tricon系统出电源卡件是双重冗余外,其它所有卡件内部都是三重冗余的,每个IO卡件内部都有3个独立的分电路,对于输入卡件来说,每个分电路读取过程数据,并将数据传输给各自的处理器进行处理,三个独立处理器通过Tribus总线通讯,最后控制输出卡件,达到控制现场设备的目的。
同时,对于每一个IO卡件,都可以安装一个热备卡件,一旦正在工作的卡件故障,热备卡件可以立即工作,由于主卡件和热备卡件始终自行同步,所以热备卡件投运是无间歇的。
整车控制系统的结构组成和工作原理

整车控制系统是指对整车车辆动力、底盘、车身、安全等多个方面进行统一管理和控制的系统,它对车辆的性能、安全性、舒适性等方面都有着重要的影响。
整车控制系统的结构组成和工作原理是整车研发和制造的重要内容之一,下面将对整车控制系统的结构组成和工作原理进行详细的介绍。
一、整车控制系统的结构组成整车控制系统包括动力总成控制系统、底盘控制系统、车身控制系统和安全控制系统四个方面。
1. 动力总成控制系统动力总成控制系统主要包括发动机控制系统、变速器控制系统和电子控制单元(ECU)。
发动机控制系统负责对发动机进行燃烧过程的控制和调整,以保证发动机的性能和经济性。
变速器控制系统则负责控制变速器的换挡过程,从而实现车辆的动力传递和速度调整。
ECU作为动力总成控制系统的核心,对发动机和变速器等多个部件进行统一管理和协调。
2. 底盘控制系统底盘控制系统主要包括悬挂系统、转向系统、制动系统和轮胎系统等。
悬挂系统负责对车辆的悬挂调整和减震控制,以保证车辆行驶时的稳定性和舒适性。
转向系统则负责实现车辆的转向控制,从而保证车辆的行驶轨迹和稳定性。
制动系统负责对车辆的制动力进行控制和调整,以保证车辆的制动安全性。
轮胎系统则负责监测和调整车辆轮胎的气压和磨损情况,以确保车辆的抓地性和操控性能。
3. 车身控制系统车身控制系统主要包括车身稳定控制系统、车身动力学控制系统和空调系统等。
车身稳定控制系统负责对车辆的侧倾和悬挂调整,以保证车辆在高速行驶和急转弯时的稳定性。
车身动力学控制系统则负责监测和调整车辆的加速、刹车和转向等动作,以保证车辆行驶时的平顺性和稳定性。
空调系统则负责对车辆的空调温度和通风进行控制和调整,以保证车内的舒适性和温度适宜。
4. 安全控制系统安全控制系统主要包括防抱死制动系统(ABS)、牵引力控制系统(TCS)、车辆稳定控制系统(VSC)和安全气囊系统等。
ABS系统负责对车辆制动时的制动力进行调整和控制,以避免车辆制动时的打滑和失控。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
xco Aco xco A21 xco 0 xco 0 y Cco
0 Aco 0 0
A13 A23 Aco A43
0 xco Bco A24 xco Bco u 0 xco 0 Aco xco 0
y Cc
xc Cc x c
式中, xc k维能控状态分量,即 Ac , Bc 能控;
xc (n k )维不能控状态分量,k=rank Qc
对系统的能控性的结构分解做几点说明
(1)在系统的能控性分解中,系统被分解为完全能 控和完全不能控的两个子系统。 (2)能控子系统的传递函数等于整个系统的传递函 1 1 C ( sI A ) B C ( sI A ) B 数,即 c c c (3)从系统能控性分解的框图中可以看出:系统的 不能控部分既不受输入u的直接影响,也没有通过 能控状态而受到u的间接影响。因此,系统的不能 控部分不能由输入u和输出y之间的传递关系来反映。 换言之,系统的传递函数(矩阵)没有完全反映系 统的内部不能控状态分量的动态品质。
线性定常系统能观性结构分解
• 系统按能观性的结构分解的所有结论,都对偶于 系统按能控性的结构分解的结果。 • 对给定不完全能观的线性定常系统
x Ax Bu y Cx
按如下算法求取系统的能观性结构分解。
• 算法(能观性结构分解的求取) 1. 列写系统的能观性判别矩阵
C CA Qo n 1 CA
G(s) C(sI A)1 B Cco (sI Aco )1 Bco
(3)从系统能观性分解的框图中可以看出:对上述不完全能 控、不完全能观系统,其传递函数矩阵的描述只是对系统 结构的不完全描述。若在系统中添加或删除不能控或不能 观子系统,并不影响系统的传递函数矩阵。所以说系统的 输入输出描述,只有对完全能控且完全能观的系统,才是 完全的描述。
P q1, , qk , qk 1, qn 3. 按下列方式组成变换矩阵,
4. 计算 A P1 AP, B P1B, C CP
• 定理1:对不完全能控的系统,利用上述算法求 取系统在线性非奇异变换 x P 1 x下的代数等价 系统 ( A, B, C ) ,具有如下的能控性分解的规范表 达形式,即 xc Ac A12 xc Bc u xc 0 Ac xc 0
4 0
1 4 1 0 1 1 56 x 1
• 1. 2. 3. 4. •
根据Jordan标准型的能控能观性的判别准则,可 以判定: x1, x2 , x3 , x5 , x7 能控状态变量为: x4 , x6 , x8 不能控状态变量为: x1, x2 , x4 , x7 , x8 能观测状态变量为: x3 , x5 , x6 不能观状态变量为: 写成分状态的形式为
0 Cco
xco x co 0 x co xco
• 对系统的能控和能观性结构分解做几点说明 (1)在系统的规范型分解中,系统被分解为完全能控能观、 能控但不能观、不能控但能观和不能控不能观四个子系统。 (2)反映系统输入输出特性的传递函数矩阵只能反映系统中 能控且能观的那个子系统的动态特性,即
T
hl
,
, hn
4. 计算
ˆ FAF 1, B ˆ CF 1 ˆ FB, C A
• 定理2:对不完全能观的系统,利用上述算法求 取系统在线性非奇异变换 x Fx 下的代数等价 ˆ, B ˆ ) ,具有如下的能观性分解的规范表 ˆ,C 系统 ( A 达形式,即
ˆ 0 x ˆo A o ˆ ˆ ˆo A21 Ao x ˆ ˆo B x o u x ˆ ˆo Bo
ˆ y C o
ˆo x 0 x ˆ o
对系统的能观性的结构分解做几点说明
(1)在系统的能观性分解中,系统被分解为完全能 观和完全不能观的两个子系统。 (2)能观子系统的传递函数等于整个系统的传递函 ˆ )1 B ˆ (sI A ˆ C(sI A)1 B 数,即 C o o o (3)从系统能观性分解的框图中可以看出:系统的 输出只与能观子系统的状态有关,而不能观子系 统的状态无法影响能观子系统的状态,因此,输 出信号不能反映不能观子系统的状态信息。
x1 x3 x4 xco x2 , xco , xco , xco x6 x5 x8 x7
• 按此顺序重新排列系数矩阵A,B,C的行和列,有
3 0 xco 0 xco xco xco y1 3 y 2 1 1 4 1 3 0 0 0 5 4 0 0 1 0 0 0 1 0 4 0 xco 0 xco x 0 co xco 0 0 1 0 0 0 5 1 5 xco 9 0 xco 4 1 xco 1 xco 0 0 0 1 3 7 2 3 u 6 0 0 0
例1 给定线性定常系统,进行能控性分解。
0 1 1 1 1 x 0 1 0 x 1 0 u 0 1 1 1 1
rank Qc rank[B AB] 2 3 解: T T Q q [010] , q [101] 在 c 中取线性无关的列向量 1 , 2 T q [10 0] 再任取 3 ,从而构成矩阵 P 1
1 1
其中,P为非奇异矩阵,从而必有
rank Qc rank Qc , rank Qo rank Qo
表明了线性非奇异变换不改变系统的能控性 和能观性。
线性定常系统能控性结构分解
考虑不完全能控线性定常系统
x Ax Bu y Cx
进行系统的能控性分解,首先要选取非奇异 矩阵。下面给出具体的算法。
3.4 控制系统的结构分解
• 系统结构的分解也称为卡尔曼标准分解。它 是讨论不完全能控和不完全能观的系统状态 的分解。系统通过代数等价变换,可以将状 态变量分解成四个部分:能控能观部分 xco 。 能控不能观部分 xco ,不能控能观部分 xco 和 xco 不能控不能观部分 。这样系统可以分解为 相应的四个子系统,称为系统的结构分解。
• 通过求逆,可得矩阵P。 • 于是可计算 A PAP1, B PB, C CP1
1 0 1 0 0 xc xc 1 2 1 0 1 u xc 0 0 0 xc 0 0 xc y 0 2 1 x c
并计算 rank Qo l 。
2. 在 Qo 中任意选取 l 个线性无关的行向量 h1, h2 , 再任取 (n l ) 个行向量 hl 1, , hn ,使得 h1, hl , hl 1, 线性无关。
3. 按下列方式构成非奇异变换矩阵
F h1 , , hl , hl 1 , hn
• 线性定常系统由Jordan标准型的结构分解 若已将系统化为Jordan标准型,然后按能控判别 法和能观判别法各状态变量的能控性和能观性, 最后按能控能观、能控不能观、不能控能观和不 能控不能观四种类型分别排列,也可进行系统的 规范分解。
例:给定系统的Jordan标准型为
x1 3 1 x 2 0 3 x3 x4 x5 x6 x 7 x8 y1 3 1 0 y 2 1 4 0 x1 1 x 2 5 x3 4 x4 0 x5 1 x6 0 1 x7 9 5 0 x8 3 7 3 0 u 6 0 2 0
• 研究系统的结构分解可以更深刻地了解系统的结构 特性,也有助于更加深入地揭示系统的状态空间描 述和输入-输出描述之间的本质区别。
能控性、能观性在线性非奇异变换下的性质 • 对于线性定常系统 ( A, B, C ) ,经过线性非奇异 变换为 ( A, B, C ),即两者之间具有如下的关系
A PAP , B PB, C CP
3 7
0 0
0 0
5 2
6 1
• 相当于对原系统矩阵进行行操作、列操作, 即进行代数等价变换。上述分解仅仅适用 于特征值几何重数都为1的情形。
• 算法(能控性结构分解的求取) 1. 列写系统的能控性矩阵 rank Qc [B AB 并求出 rank Qc k 。
An1B]
2. 在能控矩阵中任意取k个线性无关的列向量: q1, q2 , qk,再在 R n 中任意选取(n-k)个列向量: qk 1, qk 2 , qn ,使得矩阵 q1, , qk , qk 1, qn 是可 逆的。
• 按能控性和能观性分解 对n维线性定常系统
x Ax Bu y Cx
一般情况下,系统可能既不完全能控,也不完全能观。设 系统能控性判别矩阵的秩和能观判别矩阵的秩分别为
rank Qc n1 n rank Qo n2 n
• 通过线性非奇异变换可实现系统结构的规范分解,其规范 分解的表达式为