现代控制理论 刘豹
《现代控制理论》(刘豹_唐万生)
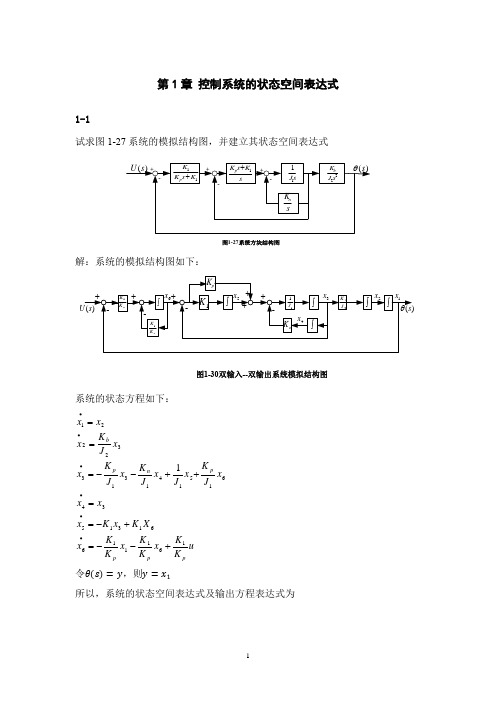
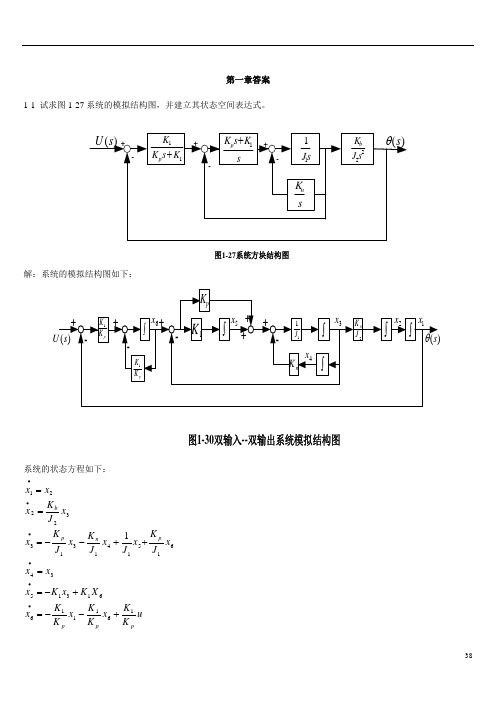
第1章 控制系统的状态空间表达式1-1试求图1-27系统的模拟结构图,并建立其状态空间表达式图1-27系统方块结构图解:系统的模拟结构图如下:图1-30双输入--双输出系统模拟结构图系统的状态方程如下:u K K x K K x K K x X K x K x x x x J K x J x J K x J K x x J K x x x pp p p n pb1611166131534615141313322211+--=+-==++--===••••••令θ(s)=y ,则y =x 1所以,系统的状态空间表达式及输出方程表达式为[ x 1•x 2•x 3•x 4•x 5•x 6•]=[ 01000000K b J 200000−K p J 1−K n J 11J K p J 100100000−K 100K 1−K 1p−K 1p ][ x 1x 2x 3x4x 5x 6]+[ 00000K 1K p ]uy =[100000][ x 1x 2x 3x 4x 5x 6]1-2有电路如图1-28所示。
以电压u(t)为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻R 2上的电压作为输出量的输出方程。
L1L2U图1-28 电路图解:由图,令i 1=x 1,i 2=x 2,u c =x 3,输出量y =R 2x 2 有电路原理可知:R 1x 1+L 1x 1•+x 3=uL 2x •2+R 2x 2=x 3x 1=x 2+Cx 3•既得 x 1•=−R1L 1x 1−1L 1x 3+1L 1ux •2=−R 2L 2x 2+1L 2x 3 x 3•=−1C x 1+1C x 2y =R 2x 2写成矢量矩阵形式为:[ x 1。
x 2。
x 3。
] =[−R 1L 10−1L 10−R 2L 21L 21C−1C 0][x 1x 2x 3]+[1L 100]u y =[0R 20][x 1x 2x 3] 1-3有机械系统如图1.29所示,M1和M2分别受外力f1和f2的作用.求以M1和M2的运动速度为输出的状态空间表达式.解:以弹簧的伸长度y 1,y 2 质量块M 1, M 2的速率c 1,c 2作为状态变量 即 x 1=y 1,x 2=y 2,x 3=c 1,x 4=c 2根据牛顿定律,对M 1有:M 1dc1dt =f 1-k 1(y 1-y 2)-B 1(c 1-c 2) 对M 2有:M 2dc2dt =f 2+k 1(y 1-y 2)+B 1(c 1-c 2)-k 2y 2-B 2c 2将x 1,x 2,x 3,x 4代入上面两个式子,得 M 1ẋ3=f 1-k 1(x 1-x 2)-B 1(x 3-x 4) M 2ẋ4=f 2+k 1(x 1-x 2)+B 1(x 3-x 4)-k 2x 2-B 2x 4B 1\y 2 c 2 y 1 c 1f 2(t)M 2M 1f 1(t) B 2 K 2K 1整理得 ẋ1=x 3ẋ2=x 4ẋ3=1M 1f 1-k 1M 1x 1+k 1M 1x 2-B 1M 1x 3+B1M 1x 4ẋ4=1M 2f 2+k1M 2x 1-k 1+k 2M 2x 2+B1M 2x 3-B 1+B 2M 2x 4输出状态空间表达式为 y 1=c 1=x 3 y 2=c 2=x 4 1-4两输入u 1,u 2,两输出y 1,y 2的系统,其模拟结构图如图1-30所示,试求其状态空间表达式和传递函数阵。
现代控制理论 刘豹 第1章 绪论
对式(62)进行拉氏变换,并假定初始条件为零,则有:
(63)
故U—X间的传递函数为: (64) 它是一个 的列阵函数。
间的传递函数为:
它是一个标量。
1.7 离散时间系统的状态空间表达式
连续时间系统的状态空间方法,完全适用于离散时间系统。类似在连续
系统中,从微分方程或传递函数建立状态空间表达式,叫系统的实现。在离
1.5.3 状态空间表达式变换为约旦标准型 这里的问题是将 (45)
变换为: (46)
根据系统矩阵 无重根时
求其特征值,可以直接写出系统的约旦标准型矩阵
有重根时
【例1-10 P37】
【例1-11 P39】
1.6 从状态空间表达式求传递函数阵
1.6.1 传递函数(阵) 1.单输入---单输出系统 已知系统的状态空间表达式: (62) 式中, 为 为 方阵; 维状态矢量; 为 和 为输出和输入,它们都是标量;A 行阵;d为标量,一般为零。 列阵;c为
输出方程为:
表示成矩阵形式,则为:
顺便指出,当 为零。
矩阵具有以上矩阵的形式时,称为友矩阵,友矩阵的特
点是主对角线上方的元素均为1;最后一行的元素可取任意值;而其余元素均
1.4.2 传递函数中有零点时的实现
此时,系统的微分方程为:
相应地,系统传递函数为:
(26) 设待实现的系统传递函数为:
因为
上式可变换为
(37) 我们总可以找到任意一个非奇异矩阵 将原状态矢量 作线性变换,
得到另一状态矢量
设变换关系为:
即
代入式(37),得到新的状态空间表达式:
(38) 1.5.2 系统特征值的不变性及系统的不变量 1.系统特征值 系统
系统特征值就是系统矩阵
现代控制理论 刘豹
0 2 2 A 1 3,..B 0
matlab的m文件文本如下: A=[0 -2 ;1 -3]; B=[2; 0]; fait02=expm(A*0.2) fait04=expm(A*0.4)
2-6 应用Matlab的系统运动分析
求下列系统在u=1(t)时的状态响应和输出响应
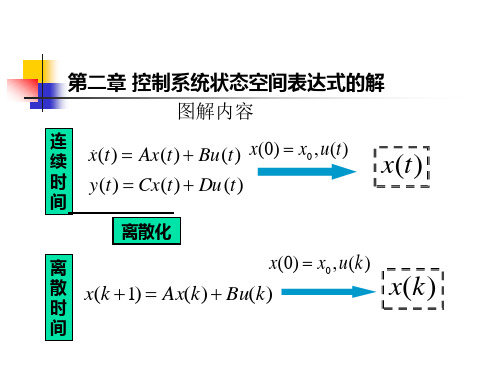
第二章 控制系统状态空间表达式的解 图解内容
连 续
x(t) Ax(t) Bu(t) x(0) x0,u(t)
时 y(t) Cx(t) Du (t)
间
x(t)
离散化
离
x(0) x0,u(k)
散 x(k 1) Ax(k) Bu(k)
x(k)
时
间
第二章 控制系统状态空间表达式的解
主要内容
(1 e2T e2T
)
H
(T
)
1 2
(T 1
e 2T 2
e 2T
1
2
分析选择不同的采样周期T.的影响
2-4 连续时间状态方程的离散化
0.5
0.45 0.4
0.35
continous discrete 1 discrete 0.5
0.3
0.25
0.2
0.15
0.1
0.05
0
0
0.5
2(t t0 )
e(t t0 )
2e2(t t0
)
0 t0 0, x(0) 1
t1
0.2, e At
0.97 0.3
0.15 0.52
x1 x(0.2) eAt1 x(0)
t2
0.4, eAt2
0.89 0.44
现代控制理论(刘豹)第一章
状态变量
状态向量
状态空间
状态方程
状态:表征 系统运动的信 息和行为 状态变量: 能完全表示系 统运动状态的 最小个数的一 组变量
由状态变量 构成的向量 x1(t) x2(t) : xn(t)
以各状态变量 x1(t),x2(t),…… xn(t)为坐标轴 组成的几维空 间。
S nY ( s ) + an −1S n −1Y ( s ) + ... + a0Y ( s ) = bm S mu ( s ) + ... + b0Y ( s )
(bm S m + bm −1S m −1 + ... + b0 ) Y ( s ) Z ( s ) G ( s) = Y ( s) / U ( s) = = ⋅ n n −1 ( S + an −1S + ... + a0 ) Z ( s) U ( s)
& x3 x3
x2 x1
机电工程系
∫
∫
∫
习题2 习题
已知离散系统的差分方程为
y (k + 2) + 3 y (k + 1) + 2 y (k ) = 2u (k + 1) + 3u (k )
试求系统的状态空间表达式,并画出其模拟结构图。
解:假设初始条件为零,系统微分方程的 Z 变换为:
z 2Y ( z ) + 3 zY ( z ) + 2Y ( z ) = 2sU ( z ) + 3U ( z )
S n Z ( s ) + an −1S n −1Z ( s ) + ... + a0 Z ( s ) = U ( s ) Y ( s ) = bn −1S
课件-现代控制理论-刘豹第三版-第5章

能控性与能观性的判别方法
能观性判别方法
能控性判别方法
表示系统是否可以通过输入控制实现任意状态转移。若系统完全能控,则可以通过设计合适的控制器实现任意状态轨迹的跟踪或镇定;若部分能控或不能控,则存在状态无法被有效控制的风险。
能控性的物理意义
表示系统状态是否可以通过输出完全反映出来。若系统完全能观,则可以通过观测输出信号来准确估计系统状态;若部分能观或不能观,则存在状态无法被准确观测的风险,进而影响控制性能的实现。
控制系统稳定性分析是控制理论的核心内容之一,对于确保控制系统的正常运行具有重要意义。
章节内容结构
稳定性概念及定义
介绍稳定性的基本概念和定义,包括Lyapunov稳定性和BIBO稳定性等。
线性系统稳定性判据
详细阐述线性系统稳定性的判据,如Routh-Hurwitz判据、Nyquist判据和Bode图等。
图解法
状态转移矩阵的计算方法
1
2
3
状态转移矩阵反映了系统在时间间隔内从初始状态到最终状态的动态变化过程。
描述系统状态的动态变化过程
若系统稳定,则状态转移矩阵将逐渐趋于零,表示系统状态将逐渐趋于稳定。
反映系统稳定性
状态转移矩阵是进行系统分析和设计的重要工具,可用于研究系统的稳定性、能控性、能观性等性质。
非线性系统稳定性分析
介绍非线性系统稳定性分析方法,如相平面法、Lyapunov直接法等。
熟练掌握线性系统稳定性的判据和分析方法,能够应用所学知识分析和设计线性控制系统。
了解非线性系统稳定性分析方法的基本原理和应用范围,能够运用所学知识分析和设计简单的非线性控制系统。
掌握稳定性的基本概念和定义,理解不同稳定性定义之间的联系与区别。
《现代控制理论(第三版)》答案刘豹-唐万生编
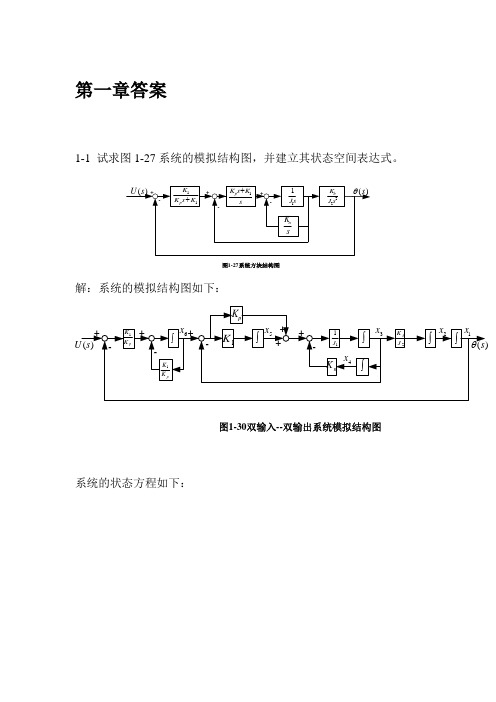
第一章答案1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式。
11K s K K p +sK s K p 1+s J 11sK n 22s J K b -++-+-)(s θ)(s U 图1-27系统方块结构图解:系统的模拟结构图如下:)(s U )(s θ---+++图1-30双输入--双输出系统模拟结构图1K pK K 1pK K 1+++pK n K ⎰⎰⎰11J ⎰2J K b ⎰⎰-1x 2x 3x 4x 5x 6x系统的状态方程如下:u K K x K K x K K x X K x K x x x x J K x J x J K x J K x x J K x x x pp p p n pb1611166131534615141313322211+--=+-==++--===∙∙∙∙∙∙阿 令y s =)(θ,则1x y =所以,系统的状态空间表达式及输出方程表达式为[]⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-----=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡∙∙∙∙∙∙6543211654321111111126543210000010000000000000010010000000000010x x x x x x y uK K x x x x x x K K K K K K J K J J K J K J K x x x x x x p p pp n p b1-2有电路如图1-28所示。
以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。
R1L1R2L2CU---------Uc ---------i1i2图1-28 电路图解:由图,令32211,,x u x i x i c ===,输出量22x R y =有电路原理可知:∙∙∙+==+=++3213222231111x C x x x x R x L ux x L x R 既得22213322222131111111111x R y x C x C x x L x L R x u L x L x L R x =+-=+-=+--=∙∙∙写成矢量矩阵形式为:[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡----=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡32121321222111321000*********x x x R y u L x x x CCL L R L L R x x x 。
现代控制理论第3版(刘豹_唐万生)课后答案资料
第一章答案1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式。
图1-27系统方块结构图解:系统的模拟结构图如下:图1-30双输入--双输出系统模拟结构图系统的状态方程如下:u K K x K K x K K x X K x K x x x x J K x J x J K x J K x x J K x x x pp p p n p b1611166131534615141313322211+--=+-==++--===••••••令y s =)(θ,则1x y =所以,系统的状态空间表达式及输出方程表达式为[]⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-----=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡••••••654321165432111111112654321000001000000000000010010000000000010x x x x x x y uK K x x x x x x K K K K K K J K J J K J K J K x x x x x x p p pp npb1-2有电路如图1-28所示。
以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。
U图1-28 电路图解:由图,令32211,,x u x i x i c ===,输出量22x R y =有电路原理可知:•••+==+=++3213222231111x C x x x x R x L ux x L x R 既得22213322222131111111111x R y x C x C x x L x L R x u L x L x L R x =+-=+-=+--=•••写成矢量矩阵形式为:[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡----=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡32121321222111321000*********x x x R y u L x x x CCL L R L L R x x x 。
现代控制理论--刘豹优秀PPT

1.3.1 从系统框图出发建立状态空间表达式 该法是首先将系统的各个环节,变换成相应的模拟结构图,并把每个积
1.4.2 传递函数中有零点时的实现
22
此时,系统的微分方程为: 相应地,系统传递函数为:
设待实现的系统传递函数为:
因为
上式可变换为
(26)
23
令 则 对上式求拉氏反变换,可得: 每个积分器的输出为一个状态变量,可得系统的状态空问表达式:
24
或表示为:
推广到 阶系统,式(26)的实现可以为:
25
(4)
6
在经典控制理论中,用指定某个输出量的高阶微分方程来描述系统的 动态过程。如上图一所示的系统,在以 作输出时,从式(1)消去中间变量 i,得到二阶微分方程为:
(5)
其相应的传递函数为:
(6)
回到式(5)或式(6)的二阶系统,若改选 和 作为两个状态变量,
即令
则得一阶微分方程组为:
7
设单输入一单输出定常系统,其状态变量为 状态方程的一般形式为:
2
1.1.3 状态方程 以状态变量
为坐标轴所构成的 维空间,称为
状态空间。
1.1.4 状态方程
由系统的状态变量构成的一阶微分方程组称为系统的状态方程。 用图下所示的 网络,说明如何用状态变量描述这一系统。
图一
3
根据电学原理,容易写出两个含有状态变量的一阶微分方程组:
亦即
(1)
式(1)就是图1.1系统的状态方程,式中若将状态变量用一般符号 ,
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
0 2 2 A 1 3,..B 0
matlab的m文件文本如下: A=[0 -2 ;1 -3]; B=[2; 0]; fait02=expm(A*0.2) fait04=expm(A*0.4)
2-6 应用Matlab的系统运动分析
求下列系统在u=1(t)时的状态响应和输出响应
K---KT u(K)=constant
x(k 1) G(T )x(k) H (T )U (k) y(k) C(T )x(k) Du(k)
t
x(t) (t t0 )x0 (t )Bu( )d ...t t0
t0
t0 kT, t (k 1)T
( k 1)T
x(k 1) (T )x(kT) ((k 1)T )Bdu(k )
2-6 应用Matlab的系统运动分析
(1 e2T e2T
)
H
(T
)
1 2
(T 1
e 2T 2
e 2T
1
2
分析选择不同的采样周期T.的影响
2-4 连续时间状态方程的离散化
0.5
0.45 0.4
0.35
continous discrete 1 discrete 0.5
0.3
0.25
0.2
0.15
0.1
0.05
0
0
0.5
2-2 矩阵指数函数---状态转移矩阵
状态转移阵的计算
方法1
(t) eAt I At 1 At2 ... 1 Akt k ...
2
k!
方法2
eAt (t) L1[(sI A)1]
sX (s) x(0) AX (s) (sI A) X (s) x0 X (s) (sI A)1 x0 x(t) L1(sI A)1 x0
2-3 线性定常非齐次方程的解
x(t) Ax Bu
x(t0 ) x0
t
x(t) (t)x0 (t )Bu( )d ...t t0
证明
t0
2-3 线性定常非齐次方程的解
例题2-8
2-3 线性定常非齐次方程的解
例题2-8
2-4 连续时间状态方程的离散化
•连续时间系统
x(t) Gx(t) Hu (t) y(t) Cx(t) Du (t)
1
1.5
2
2.5
3
3.5
4
4.5
2-4 离散时间系统状态方程求解
应用matlab函数[G,H]=c2d(A,B,T) 实现从连续时间到离散时间的模型转换
A
0 2
13,..B
0 1
2-5离散时间系统状态方程求解
x(k 1) G(T )x(k) H (T )u(k)
线性定常系统
x(k 1) Gx(k) Hu (k) x(0) x0
跃步走
t0 t2 x(t2 ) (t2 t0 )x0
(t2 t0 ) (t2 t1)(t1 t0 )
性质1
(t)( ) (t )
e At e A e A(t )
(t 0)[0 ( )] (t ( ))
2-2 矩阵指数函数---状态转移矩阵
状态转移阵的性质
性质2
(t t) (0) I 从定义得证
2-4 连续时间状态方程的离散化
近似离散化
x((k 1)T ) x(kT) Ax(kT) Bu(kT) T
x(k 1) (TA I )x(k) TBu(k)
2-4 连续时间状态方程的离散化
例题: 2-13 离散化状态方程
x
0 0
1 2
x
10u(t)
G(T ) e AT 1 0
1 2
figure(2);plot(t,y),grid
2-6 应用Matlab的系统运动分析
方法2:应用matlab的simulink中的模型库
建立mdl文件 求下列系统的状态响应
21 19 20 0
A
19
21
20 ,..B 1,
40 40 40 2
C 1 0 2
u(t) 1 et cos5t
系统的唯一解
证明: 假设x(t)为矢量幂级数形式
x(t) b0 b1t ... bkt k ...
2-1 线性定常齐次状态方程的解
证明: 假设x(t)为矢量幂级数形式 x(t) b0 b1t b2t 2 ... bkt k ...
x(t) b1 2b2t 3b3t 2 ... kbkt k1 ... A(b0 b1t b2t 2 ... bkt k ...)
状态转移矩阵
x(t) (t)x0 x(t) (t t0 )x0
状态转移阵是nxn的
状态转移阵的概念、性质、求法
2-2 矩阵指数函数---状态转移矩阵
状态转移阵的性质
e A(t t0 )
2e e (t t0 )
2(t t0 )
2e(t t0 ) 2e2(t t0 )
e e (t t0 )
性质3
[(t)]1 (t) I (t t) (t 0)(0 t) (t)(t)
性质4
(t) A(t) (t) A 从定义得证
2-2 矩阵指数函数---状态转移矩阵
状态转移阵的性质 问题1:已知某状态转移阵如下,求其逆阵
2et e2t
et e2t
(t) 2et 2e2t
b1k
bk
...
bnk
同幂次项系数相等
b1 Ab0
b2
1 2
Ab1
1 2!
A2b0
...
bk
1 k
Abk 1
1 k!
Ak
b0
2-1 线性定常齐次状态方程的解
t=0, b0=x0
x(t )
(I
At
1 2!
A2t 2
...
1 k!
Akt k
...)x0
e At
I
At
1 2
A2t 2
...
2-2 矩阵指数函数---状态转移矩阵
状态转移阵的计算 例题:方法1
解
2-2 矩阵指数函数---状态转移矩阵
例题:
2-2 矩阵指数函数---状态转移矩阵
例题:方法2
A
0 2
1 3
特征值:
I
A
2
1
3
(
1)(
2)
T
1 1
1 2
e At
et
T
0
e
0
2t
T
1
2-2 矩阵指数函数---状态转移矩阵
特殊矩阵的状态转移阵
2 可化为对角型
0 1 A 2 3
T
1 1
1
2
,
T
1
AT
1 0
0
2
et
et
0
0
e
2t
eAt ?
e1t
e At (t) T
e2t ...
T 1
e
nt
2-2 矩阵指数函数---状态转移矩阵
证明以上结论
z T 1ATz,...x Tz... x Ax z z,..z et z0..............x eAt x0 ..z T 1x.....x Tz ......x TetT 1x0
函数调用格式: [y, t, x]=step(sys) (3)lsim(sys) 求取任意输入时系统状态响应
函数调用格式: [y, t, x]=lsim(sys,u,t) (4)initial(sys) 求取零输入时系统状态响应
函数调用格式: [y, t, x]=initial(sys,x0)
2-6 应用Matlab的系统运动分析
它会产生什 么结论?
An n1An1 ... 1A 0I
e At I At 1 A2t 2 ... 1 An1t n1 1 Ant n 1 An1t n1 ...
2!
(n 1)!
n!
(n 1)!
n1(t) An1 n2 (t) An2 ... 1(t) A 0 (t)I
第二章 控制系统状态空间表达式的解 图解内容
连 续
x(t) Ax(t) Bu(t) x(0) x0,u(t)
时 y(t) Cx(t) Du (t)
间
x(t)
离散化
离
x(0) x0,u(k)
散 x(k 1) Ax(k) Bu(k)
x(k)
时
间
第二章 控制系统状态空间表达式的解
主要内容
2-2 矩阵指数函数---状态转移矩阵
1.2
0
状
1
态
0.8
转
移
0.6
阵
0.4
的
性
0.2
质 0
0.2s 0.4s
-0.2 0
0.05
0.1
0.15
0.2
0.25
2-2 矩阵指数函数---状态转移矩阵
状态转移阵的性质
分步走
t 0, t1, t2 x(t1) (t1 t0 )x0 x(t2 ) (t2 t1)x(t1) x(t2 ) (t2 t1)(t1 t0 )x0
B=[0 1 2]’; C=[1 0 2]; D=0; sys=ss(A,B,C,D);
t=0:0.02:4;
u=1+exp(-t).*cos(5*t); [y,t,x]=lsim(sys,u,t); plot(t,x),grid
x0=[1 0 0]’; [y,t,x]=initial(sys,x0); plot(t,x)
kT
2-4 连续时间状态方程的离散化
•连续时间系统