《现代控制理论(第3版)》刘豹 唐万生课件 第4章
《现代控制理论(第三版)》答案刘豹-唐万生编
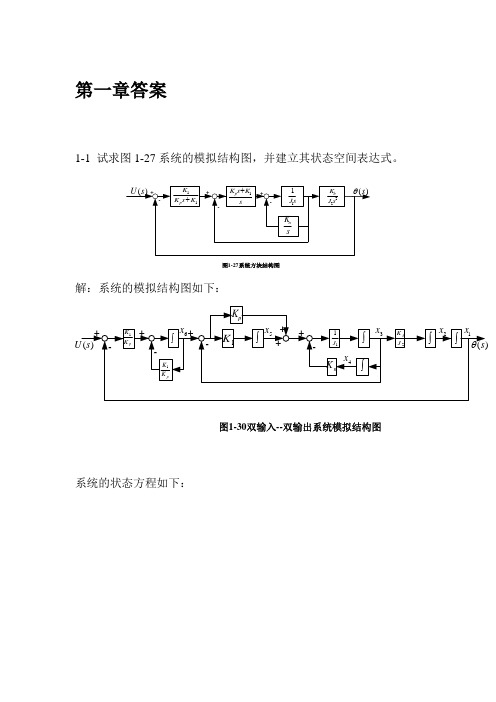
第一章答案1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式。
11K s K K p +sK s K p 1+s J 11sK n 22s J K b -++-+-)(s θ)(s U 图1-27系统方块结构图解:系统的模拟结构图如下:)(s U )(s θ---+++图1-30双输入--双输出系统模拟结构图1K pK K 1pK K 1+++pK n K ⎰⎰⎰11J ⎰2J K b ⎰⎰-1x 2x 3x 4x 5x 6x系统的状态方程如下:u K K x K K x K K x X K x K x x x x J K x J x J K x J K x x J K x x x pp p p n pb1611166131534615141313322211+--=+-==++--===∙∙∙∙∙∙阿 令y s =)(θ,则1x y =所以,系统的状态空间表达式及输出方程表达式为[]⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-----=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡∙∙∙∙∙∙6543211654321111111126543210000010000000000000010010000000000010x x x x x x y uK K x x x x x x K K K K K K J K J J K J K J K x x x x x x p p pp n p b1-2有电路如图1-28所示。
以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。
R1L1R2L2CU---------Uc ---------i1i2图1-28 电路图解:由图,令32211,,x u x i x i c ===,输出量22x R y =有电路原理可知:∙∙∙+==+=++3213222231111x C x x x x R x L ux x L x R 既得22213322222131111111111x R y x C x C x x L x L R x u L x L x L R x =+-=+-=+--=∙∙∙写成矢量矩阵形式为:[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡----=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡32121321222111321000*********x x x R y u L x x x CCL L R L L R x x x 。
现代控制理论.pptx

第0章 引论
1892年,前沙俄数学家李雅普诺夫(A.M. Lyapunov)在其 博士论文“运动稳定的一般问题”中提出Lyapunov稳定性判别 方法,包括第一法和第二法,系统地建立了动力学系统稳定性 的一般理论。
第0章 引论
3.2 经典控制理论阶段
第一次工业革命时期,瓦特(J.Watt)使用的自动调节进气 阀门以控制蒸汽机转速的离心式(飞球式)调速器,是闭环自动 控制系统应用的第一项重大成果。
物理学家麦克斯韦(J.C. Maxwell)与1868年在“论调节器” 论文首次提出反馈控制的概念,对瓦特调速器系统中的不稳定现 象进行研究,开辟了自动控制作为一门科学发展的开端。
参加本课程的同学必须人手1册教材、出勤听课、听 课并记笔记和完成作业。
(缺课达到1/3,缺作业达1/4者取消正常考试资格)
第0章 引论
教材选用: 【1】刘豹, 唐万生. 现代控制理论: 第3版. 北京:机械工业出版社, 2006 主要参考书: 【1】郑大钟. 线性系统理论: 第2版. 北京:清华大学出版社, 2002 【2】 (美)J.J.Dazzo, (美) R.H.Houpis. Linear Control System Analysis and Design: Fourth Edition. 英文影印版. 北京:清华大 学出版社,2000 【3】 (美) R. C. Dorf, (美)R. H. Bishop. Modern Control System: Eleventh Edition. 英文影印版. 北京:电子工业出版社,2009
现代控制理论基础课件第四章资料
x
2
1
u
1
x
3
0
0x4 1
x1
y 1
0
0
0
x
2
x
3
x4
计算系统的能控性判别矩阵
11
计算系统的能控性判别矩阵
0 1 0 1
U [B
AB
A2 B
A3
B]10源自100 1 0 11
1 0
11
0
rankU 4 n
根据能控性秩判据,系统完全能控。
12
定理4-3[能控性PBH秩判据]线性连续定常系统 x Ax Bu
对于多输入系统有类似的关系和性质。
(2)对于多输入系统, U阵非方, UU为T 方阵,则有
( A能, B控)
非奇U异U T
则能控度即为 detU的U值T 。
10
例4-2 倒立摆系统状态空间描述为
x1 0 1 0 0 x1 0
x
2
x x
3 4
0 0 0
0 0 0
1 0 11
0
x0和任意终端状态
x(t1 )
x
,
f
存在一个无约束容许输入 u(t) ,能在有限时间区间 [t0内,t1,]
使系统状态由 x0转移到 x,f 则称此系统或 (A,对B)是状态
完全能控的,或简称此系统或 (A,对B)是能控的。否则,
则称此系统或 (A,B)对是状态不完全能控的,或简称不
能控。
说明:
•对状态转移的轨迹没有规定,表征了能控性的定性特点
αT A iαT , αT B 0 的特征向量 α 0。
(4—39)
证明:见教材P120
能控性PBH特征向量判据主要用于理论分析
现代控制理论--刘豹优秀PPT

1.3.1 从系统框图出发建立状态空间表达式 该法是首先将系统的各个环节,变换成相应的模拟结构图,并把每个积
1.4.2 传递函数中有零点时的实现
22
此时,系统的微分方程为: 相应地,系统传递函数为:
设待实现的系统传递函数为:
因为
上式可变换为
(26)
23
令 则 对上式求拉氏反变换,可得: 每个积分器的输出为一个状态变量,可得系统的状态空问表达式:
24
或表示为:
推广到 阶系统,式(26)的实现可以为:
25
(4)
6
在经典控制理论中,用指定某个输出量的高阶微分方程来描述系统的 动态过程。如上图一所示的系统,在以 作输出时,从式(1)消去中间变量 i,得到二阶微分方程为:
(5)
其相应的传递函数为:
(6)
回到式(5)或式(6)的二阶系统,若改选 和 作为两个状态变量,
即令
则得一阶微分方程组为:
7
设单输入一单输出定常系统,其状态变量为 状态方程的一般形式为:
2
1.1.3 状态方程 以状态变量
为坐标轴所构成的 维空间,称为
状态空间。
1.1.4 状态方程
由系统的状态变量构成的一阶微分方程组称为系统的状态方程。 用图下所示的 网络,说明如何用状态变量描述这一系统。
图一
3
根据电学原理,容易写出两个含有状态变量的一阶微分方程组:
亦即
(1)
式(1)就是图1.1系统的状态方程,式中若将状态变量用一般符号 ,
《现代控制理论》刘豹著(第3版)课后习题参考答案(最完整版)
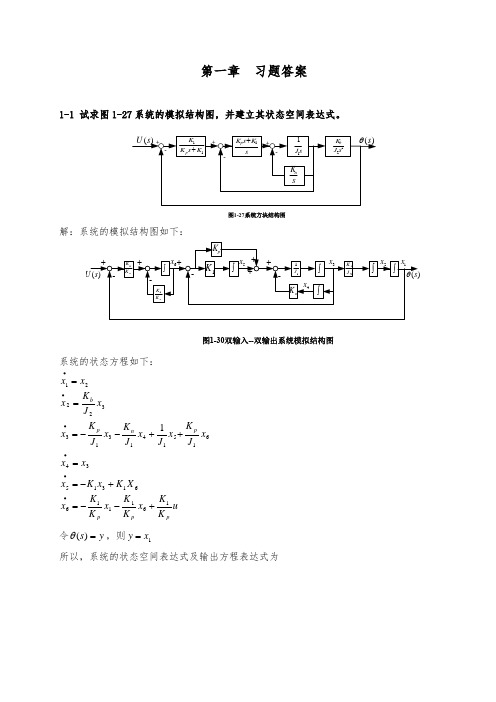
第一章 习题答案1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式。
图1-27系统方块结构图解:系统的模拟结构图如下:图1-30双输入--双输出系统模拟结构图系统的状态方程如下:u K K x K K x K K x X K x K x x x x J K x J x J K x J K x x J K x x x pp p p n p b1611166131534615141313322211+--=+-==++--===••••••令y s =)(θ,则1x y =所以,系统的状态空间表达式及输出方程表达式为[]⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-----=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡••••••654321165432111111112654321000001000000000000010010000000000010x x x x x x y uK K x x x x x x K K K K K K J K J J K J K J K x x x x x x p p pp npb1-2有电路如图1-28所示。
以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。
U图1-28 电路图解:由图,令32211,,x u x i x i c ===,输出量22x R y =有电路原理可知:•••+==+=++3213222231111x C x x x x R x L ux x L x R 既得22213322222131111111111x R y x C x C x x L x L R x u L x L x L R x =+-=+-=+--=•••写成矢量矩阵形式为:[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡----=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡32121321222111321000*********x x x R y u L x x x CCL L R L LR x x x 。
课件现代控制理论刘豹第三版共50页文档

•
29、在一切能够接受法律支配的人类 的状态 中,哪 里没有 法律, 那里就 没有自 由。— —洛克
•
30、风俗可以造就法律,也可以废除 法律。 ——塞·约翰逊
谢谢你的阅读
❖ 知识就是财富 ❖ 丰富你的人生
71、既然我已经踏上这条道路,那么,任何东西都不应妨碍我沿着这条路走下去。——康德 72、家庭成为快乐的种子在外也不致成为障碍物但在旅行之际却是夜间的伴侣。——西塞罗 73、坚持意志伟大的事业需要始终不渝的精神。——伏尔泰 74、路漫漫其修道远,吾将上下而求索。——屈原 75、内外相应,言行相称。——韩非
课件现代控制理论刘豹第三版
•
26、我们像鹰一样,生来就是自由的 ,但是 为了生 存,我 们不得 不为自 己编织 一个笼 子,然 后把自 己关在 里面。时 间再长 ,也还 是没有 制约力 的。— —爱·科 克
•
28、好法律是由坏风俗创造出来的。 ——马 克罗维 乌斯
现代控制理论第4章(续)
4.5 状态观测器在4.2 节中介绍控制系统设计的极点配置方法时,曾假设所有的状态变量均可有效地用于反馈。
然而在实际情况中,不是所有的状态度变量都可用于反馈。
这时需要要估计不可用的状态变量。
需特别强调,应避免将一个状态变量微分产生另一个状态变量,因为噪声通常比控制信号变化更迅速,所以信号的微分总是减小了信噪比。
有时一个单一的微分过程可使信噪比减小数倍。
有几种不用微分来来估计不能观测状态的方法。
不能观测状态变量的估计通常称为观测。
估计或者观测状态变量的装置(或计算机程序)称为状态观测器,或简称观测器。
如果状态观测器能观测到系统的所有状态变量,不管其是否能直接测量,这种状态观测器均称为全维状态观测器。
有时,只需观测不可测量的状态变量,而不是可直接测量的状太态变量。
例如,由于输出变量是能观测的,并且它们与状态变量线性相关,所以无需观测所有的状态变量,而只观测n-m 个状态变量,其中n 是状态向量的维数,m 是输出向量的维数。
估计小于n 个状态变量(n 为状态向量的维数)的观测器称为降维状态观测器,或简称为降价观测器。
如果降维状态观测器的阶数是最小的,则称该观测器为最小阶状态观测器或最小阶观测器。
本节将讨论全维状态观测器和最小阶状态观测器。
4.5.1 引言状态观测器基于输出的测量和控制变量来估计状态变量。
在3.7节讨论的能观测性概念有重要作用。
正如下面将看到的,当且仅当满足能观测性条件时,才能设计状态观测器。
在下面关于状态观测器的讨论中,我们用x ~表示被观测的状态向量。
在许多实际情况中,将被观测的状态向量用于状态反馈,以产生所期望的控制向量。
考虑如下线性定常系统Bu Ax x+= (4.27) Cx y =(4.28)假设状态向量x 由如下动态方程)~(~~x C y K Bu x A x e -++=(4.29)中的状态x ~来近似,该式表示状态观测器。
注意到状态观测器的输入为y 和u ,输出为x ~。
《现代控制理论》刘豹著(第3版)课后习题答案(最完整版)
第一章习题答案1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式。
11K s K K p +sK s K p 1+s J 11sK n 22s J K b -++-+-)(s θ)(s U 图1-27系统方块结构图解:系统的模拟结构图如下:)(s U )(s θ---+++图1-30双输入--双输出系统模拟结构图1K pK K 1pK K 1+++pK n K ⎰⎰⎰11J ⎰2J K b ⎰⎰-1x 2x 3x 4x 5x 6x系统的状态方程如下:u K K x K K x K K x X K x K x x x x J K x J x J K x J K x x J K x x x pp p p n p b1611166131534615141313322211+--=+-==++--===∙∙∙∙∙∙令y s =)(θ,则1x y =所以,系统的状态空间表达式及输出方程表达式为[]⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-----=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡∙∙∙∙∙∙654321165432111111112654321000001000000000000010010000000000010x x x x x x y uK K x x x x x x K K K K K K J K J J K J K J K x x x x x x p p pp n p b1-2有电路如图1-28所示。
以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。
R1L1R2L2CU---------Uc---------i1i2图1-28 电路图解:由图,令32211,,x u x i x i c ===,输出量22x R y =有电路原理可知:∙∙∙+==+=++3213222231111x C x x x x R x L ux x L x R 既得22213322222131111111111x R y x C x C x x L x L R x u L x L x L R x =+-=+-=+--=∙∙∙写成矢量矩阵形式为:[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡----=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡32121321222111321000*********x x x R y u L x x x CC L L R L L R x x x 。
现代控制理论课件(第三版)-刘豹主编-机械工业出版社
Modern Control Theory
L01
绪论
网络交流
为了配合教与学,更好地掌握《现代控制理论》 知识,交流学习经验,交换学习信息,已在网 络上建立了《现代控制理论》社区。社区建在 Yahoo groups 上,社区名称为Modern Control Theory。此社区是针对现代控制理论 课程学习建立的,内容与教与学密切相关。鼓 励所有同学加入该社区。
Modern Control Theory
L01
绪论
教学要求
参加本课程的同学必须
人手一册教材 出勤听课 记课堂笔记 完成作业
(缺课达到1/3,缺作业达1/4者取消正常考试资格。)
Modern Control Theory
现代控制理论
沈阳建筑大学 信息与控制工程学院
L01
绪论
绪论
建议:在Yahoo 上建立帐号 sjzu+校园卡编号,以此账号注册
Modern Control Theory
L01
绪论
网络交流
社区所能提供的:
Lecture notes/slides, Related learning materials, Outline of the general review, Information and news in this course.
Modern Control Theory
L01
绪论
绪论
关于自动化的介绍 Brief Introduction to Automation
自动化的理论基础
自动化技术是一门新兴的科学技术,它以控制论、信息 论和系统论为理论基础,以哲学的方法论为研究方法。 Cybernetics Information Theory Systemism
现代控制理论第3版课后答案
现代控制理论第3版刘豹唐万生机械工业出版社课后全部答案第一章答案1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式。
图1-27系统方块结构图解:系统的模拟结构图如下:图1-30双输入--双输出系统模拟结构图系统的状态方程如下:u K K x K K x K K x X K x K x x x x J K x J x J K x J K x x J K x x x pp p p n p b1611166131534615141313322211+--=+-==++--===••••••令y s =)(θ,则1x y =所以,系统的状态空间表达式及输出方程表达式为[]⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-----=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡••••••654321165432111111112654321000001000000000000010010000000000010x x x x x x y uK K x x x x x x K K K K K K J K J J K J K J K x x x x x x p p pp npb1-2有电路如图1-28所示。
以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。
U图1-28 电路图解:由图,令32211,,x u x i x i c ===,输出量22x R y =有电路原理可知:•••+==+=++3213222231111x C x x x x R x L ux x L x R 既得22213322222131111111111x R y x C x C x x L x L R x u L x L x L R x =+-=+-=+--=•••写成矢量矩阵形式为:[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡----=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡32121321222111321000*********x x x R y u L x x x CCL L R L L R x x x 。