欧姆龙PLC通信协议
OMRON PLC通讯协议速查表

对该命令的多帧应答,可用初始化和中止命令代替定界符。如果发送其他命令,他们 同样做定界符处理
PLC 设置
PLC 方式
UM 区域
运行
监控
编程
写保护
读保护
允许
允许
允许
允许
允许
执行条件
命令
单个
多重
允许
…..
答应
单个
多重
允许
允许
写 IR/SR 区,命令为 WR 将数据写入 IR/SR 区中,以指定字为起始,按字依次写入。
编程 有效 有效 有效 有效 有效 有效 有效 有效 有效 有效 有效 有效 有效 有效 有效 有效 有效 有效 有效 有效 有效 有效 有效 有效 有效 有效 有效 有效
名称
读 IR/SR 区 读 LR 区 读 HR 区 读 PV
读 TC 状态 读 DM 区 读 AR 区 读 RM 区 读 IR/SR 区 读 LR 区 读 HR 区
命令格式
应答格式
限制 地址 253~255 中的数据是只读数据。如试图对这些字执行写操作,虽然不会出现错 误,但这些字中的内容不会改变。
PLC 设置
PLC 方式
UM 区域
运行
监控
编程 写保护 读保护
…..
允许
允许
允许
允许
执行条件
命令
单个
多重
允许
允许
答应
单个
多重
允许
…….
04 地址超出区域
在 SV 读命令或 SV 修改命令中的程 修改程序的地址设置,再
序地址超出 65535 最大值
传送命令
13 FCS 错误
FCS 错误,或是 FCS 计算错误,或 检查 FCS 计算方法,如是
欧姆龙plc串口 Fins命令协议通讯演示
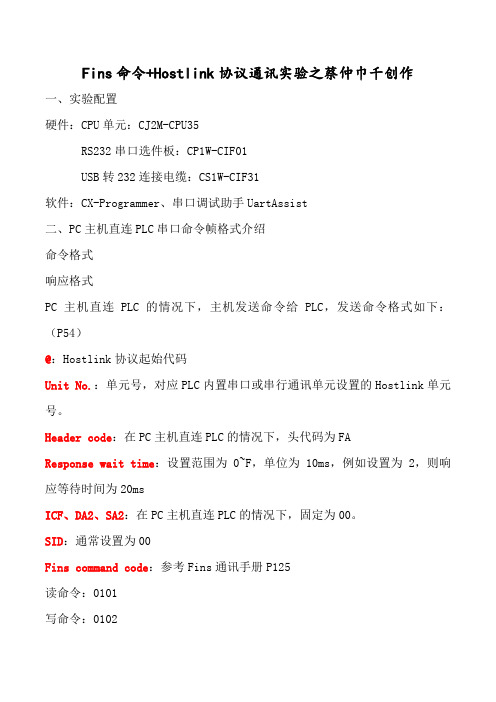
Fins命令+Hostlink协议通讯实验之蔡仲巾千创作一、实验配置硬件:CPU单元:CJ2M-CPU35RS232串口选件板:CP1W-CIF01USB转232连接电缆:CS1W-CIF31软件:CX-Programmer、串口调试助手UartAssist二、PC主机直连PLC串口命令帧格式介绍命令格式响应格式PC主机直连PLC的情况下,主机发送命令给PLC,发送命令格式如下:(P54)@:Hostlink协议起始代码Unit No.:单元号,对应PLC内置串口或串行通讯单元设置的Hostlink单元号。
Header code:在PC主机直连PLC的情况下,头代码为FAResponse wait time:设置范围为0~F,单位为10ms,例如设置为2,则响应等待时间为20msICF、DA2、SA2:在PC主机直连PLC的情况下,固定为00。
SID:通常设置为00Fins command code:参考Fins通讯手册P125读命令:0101写命令:0102Text:具体操纵内容,读写区域、读取起始地址、数据长度等内容存储区代码:(参考Fins通讯手册 P137)DM(word):82W(bit):31W(word):B1CIO区(bit):30Tips:使用Fins指令最大可读取538个字节。
一条命令不克不及超出1114个字符。
三、串口通讯调试实例实例1——DM数据寄存器区读写实例;1、读取D0开始1个通道的值发送命令:↙(回车键)返回命令码:↙(回车键)2、读取D100开始的50个通道发送命令:↙(回车键)3、写D200开始的2个通道发送命令:@00FA00000000001028200C8000002123456780F*↙(回车键) Header code:在PC主机直连PLC的情况下,头代码为FAResponse wait time:设置范围为0~FICF、DA2、SA2:在PC主机直连PLC的情况下,固定为00。
欧姆龙plcTCP通讯协议
前几天工作需要学习了一下欧姆龙TCP通讯协议。
专注了几天吧,现在总结一下,顺便和大家分享一下欧姆龙plc TCP通讯协议和注意要点,我用的那款PLC是NJ501-1300,我也不清楚欧姆龙别的系列PLC通讯协议有没有区别,我觉得大体应该差不多了吧!朋友们有条件可以试试哈。
我电脑是建立客户端的,plc做位服务器。
这样做有个弊端,每次通讯失败就要重新连接。
TCP通讯有个特点每次通讯前都要先握手,握手成功后才可以发数据。
因为以前没有接触过,不懂,在上面打了好多圈圈,不管是复制别人的通讯格式还是手抄,都通讯失败。
还有一点就是找的通讯手册全是英文的,实在是有点心有余而力不足的感觉。
所以作为新接触TCP通讯协议的朋友一定要注意这点。
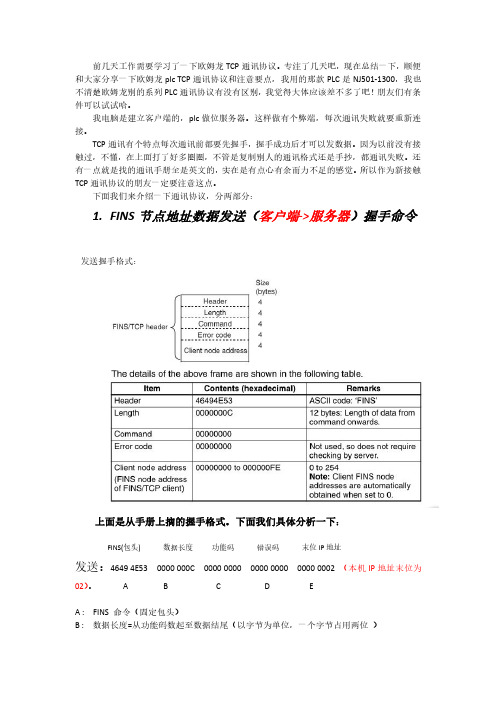
下面我们来介绍一下通讯协议,分两部分:1.FINS节点地址数据发送(客户端->服务器)握手命令发送握手格式:上面是从手册上摘的握手格式。
下面我们具体分析一下:FINS(包头)数据长度功能码错误码末位IP地址发送:46494E530000000C000000000000000000000002(本机IP地址末位为02)。
A B C D EA:FINS命令(固定包头)B:数据长度=从功能码数起至数据结尾(以字节为单位,一个字节占用两位)C:功能码分为00000000:客户端服务端00000001:服务端客户端00000002:FINS贞发送命令00000003:FINS贞发送错误通知命令00000006:确立通信连接D:错误码分为00000000:为正常00000001:数据头不是FINS或ASCII格式00000002:数据长度过长00000003:命令(C功能码)错误00000020:连接/通信被占用E:000000C7为本机IP地址末位(十六进制表示),如PLC为客户端:192.168.250.1本机IPC (服务器)IP:192.168.250.02。
再重申一遍,发数据前一定要先发握手数据。
欧姆龙PLC通信协议

欧姆龙 PLC 通信协议参考: W342 --SYSMAC CS/CJ Series Communications Commands欧姆龙通信命令可分为两类:1: C-mode commands 只可通过串口通讯 2: FINS commands 既可通过串口通讯也可通过各类网络通信(适应性较强) 面只讲 FINS 命令一、命令发送:FINS 直连发送命令如下:FINS command code见下表5-1-1 FINS COmmandSThefdlwirg table IlStS the FINS CCXnmands.命令后面紧跟着就是内存区域寻址,见下表Command Code 后面紧跟着需要访问的地址,地址可分为按字地址或按位地址,取决于你需要访的的是字还是某一位。
由紧跟着Command Code 后面的那个字节( I/O memory area designation )区分是读取字还是读取位,还是写入字或写入位,具体定义见下表:5-2-2 I/O MemOry AddreSS DeSignatiOnS按字地址:选取表中Data Type 列中为Word 的命令(命令在Memory area code 内)按字地址的三个地址位中,只使用前两个,最后一个字节为Ascii 码”00”,其后跟两个字节为需要传输的数据量,然后紧跟着就是传输的数据,数据高位在前低位在后。
例如从H12 开始读取7 个字的数据,命令为:0101 B2 001200 0007 例如将W3、W4、W5 分别置数据1234 、ABCD、7890,命令为:0102 B1 000300 0003 1234ABCD7890按位地址:选取表中Data Type 列中为Bit 的命令(命令在Memory area code 内)按位地址的三个地址位中,前两个指示位所在的字,最后一个字节指示位在字中的位置(0~15),其后跟两个字节为需要传输的数据量,然后紧跟着就是传输的数据,每一位的值用一个字节的数据代替,当寻址的位为0 时用ascii码“ 0”代替,当寻址的位为1 时用ascii 码“ 1”代替。
欧姆龙plc通讯协议
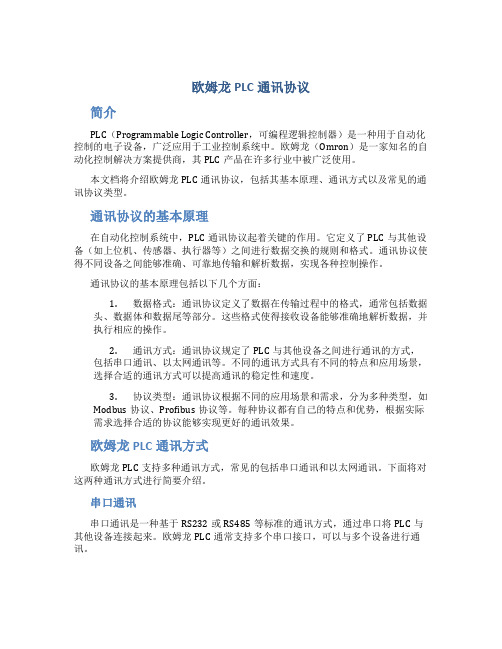
欧姆龙PLC通讯协议简介PLC(Programmable Logic Controller,可编程逻辑控制器)是一种用于自动化控制的电子设备,广泛应用于工业控制系统中。
欧姆龙(Omron)是一家知名的自动化控制解决方案提供商,其PLC产品在许多行业中被广泛使用。
本文档将介绍欧姆龙PLC通讯协议,包括其基本原理、通讯方式以及常见的通讯协议类型。
通讯协议的基本原理在自动化控制系统中,PLC通讯协议起着关键的作用。
它定义了PLC与其他设备(如上位机、传感器、执行器等)之间进行数据交换的规则和格式。
通讯协议使得不同设备之间能够准确、可靠地传输和解析数据,实现各种控制操作。
通讯协议的基本原理包括以下几个方面:1.数据格式:通讯协议定义了数据在传输过程中的格式,通常包括数据头、数据体和数据尾等部分。
这些格式使得接收设备能够准确地解析数据,并执行相应的操作。
2.通讯方式:通讯协议规定了PLC与其他设备之间进行通讯的方式,包括串口通讯、以太网通讯等。
不同的通讯方式具有不同的特点和应用场景,选择合适的通讯方式可以提高通讯的稳定性和速度。
3.协议类型:通讯协议根据不同的应用场景和需求,分为多种类型,如Modbus协议、Profibus协议等。
每种协议都有自己的特点和优势,根据实际需求选择合适的协议能够实现更好的通讯效果。
欧姆龙PLC通讯方式欧姆龙PLC支持多种通讯方式,常见的包括串口通讯和以太网通讯。
下面将对这两种通讯方式进行简要介绍。
串口通讯串口通讯是一种基于RS232或RS485等标准的通讯方式,通过串口将PLC与其他设备连接起来。
欧姆龙PLC通常支持多个串口接口,可以与多个设备进行通讯。
串口通讯的优点是成本较低,适用于小规模的控制系统。
然而,由于串口通讯的传输速率较低,其通讯距离有限,且易受干扰。
因此,在一些大规模、复杂的控制系统中,串口通讯的应用相对较少。
以太网通讯以太网通讯是一种基于以太网协议的通讯方式,通过以太网将PLC与其他设备连接起来。
欧姆龙的通讯协议书
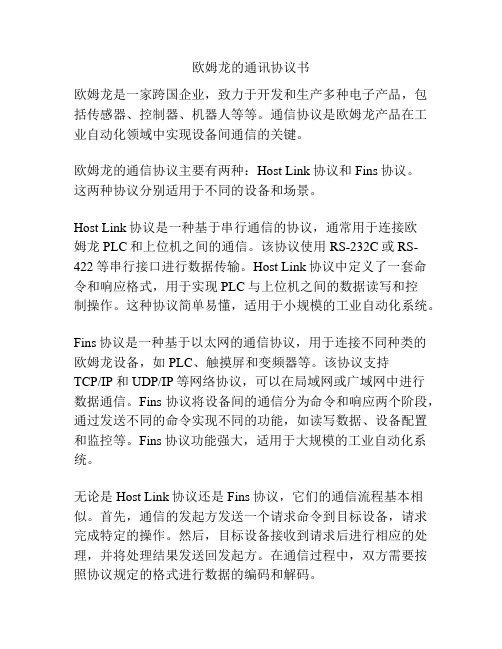
欧姆龙的通讯协议书欧姆龙是一家跨国企业,致力于开发和生产多种电子产品,包括传感器、控制器、机器人等等。
通信协议是欧姆龙产品在工业自动化领域中实现设备间通信的关键。
欧姆龙的通信协议主要有两种:Host Link协议和Fins协议。
这两种协议分别适用于不同的设备和场景。
Host Link协议是一种基于串行通信的协议,通常用于连接欧姆龙PLC和上位机之间的通信。
该协议使用RS-232C或RS-422等串行接口进行数据传输。
Host Link协议中定义了一套命令和响应格式,用于实现PLC与上位机之间的数据读写和控制操作。
这种协议简单易懂,适用于小规模的工业自动化系统。
Fins协议是一种基于以太网的通信协议,用于连接不同种类的欧姆龙设备,如PLC、触摸屏和变频器等。
该协议支持TCP/IP和UDP/IP等网络协议,可以在局域网或广域网中进行数据通信。
Fins协议将设备间的通信分为命令和响应两个阶段,通过发送不同的命令实现不同的功能,如读写数据、设备配置和监控等。
Fins协议功能强大,适用于大规模的工业自动化系统。
无论是Host Link协议还是Fins协议,它们的通信流程基本相似。
首先,通信的发起方发送一个请求命令到目标设备,请求完成特定的操作。
然后,目标设备接收到请求后进行相应的处理,并将处理结果发送回发起方。
在通信过程中,双方需要按照协议规定的格式进行数据的编码和解码。
除了以上两种主要的通信协议,欧姆龙还提供了其他特定于不同产品的协议。
例如,Vision协议用于连接欧姆龙视觉产品,实现图像数据的传输和处理。
CX-Server协议用于连接欧姆龙的运动控制器,实现运动控制指令的传输和执行。
值得注意的是,欧姆龙的通信协议不仅仅限于其自家产品的通信,还支持与其他厂家的设备进行通信。
这使得欧姆龙的产品在工业自动化领域中具有更高的灵活性和可扩展性。
总结起来,欧姆龙的通信协议在工业自动化领域中起着重要的作用。
Host Link协议适用于PLC与上位机之间的串行通信,而Fins协议适用于不同设备的以太网通信。
欧姆龙plc通讯协议格式
欧姆龙plc通讯协议格式
欧姆龙CPM1A型plc与上位计算机通信的顺序是上位机先发出命令信息给PLC,PLC返回响应信息给上位机。
每次通信发送/接受的一组数据称为一“帧”。
帧由少于131个字符的数据构成,若发送数据要进行分割帧发送,分割帧的结尾用CR码一个字符的分界符来代替终终止符。
发送帧的一方具有发送权,发送方发送完一帧后,将发送权交给接受方。
发送帧的基本格式为:
其中:
@ ——为帧开始标志;
机号——指定与上位机通信的PLC(在PLC的DM6653中设置);
识别码——该帧的通信命令码(两个字节);
正文——设置命令参数;
FCS——帧校验码(两个字符),它是从@开始到正文结束的所有字符的ASCⅡ码按位异或运算的结果;
终止符——命令结束符,设置“*”和“回车”两个字符表示命令结束。
响应的基本格式为:
其中:
@ ----为帧开始标志;
机号----应答的的PLC号,与上位机指定的PLC号相同;
识别码----该帧的通信命令码,和上位机所发的命令码相同;
结束码----返回命令结束有无错误等状态;
正文——设置命令参数,仅在上位机有读数据时生效;
FCS——帧校验码,由PLC计算给出,计算方法同上;终止符——命令结束符。
欧姆龙通讯协议种类

欧姆龙通讯协议种类欧姆龙通讯协议是指用于欧姆龙公司产品之间进行数据通信的一种协议。
欧姆龙作为一家全球领先的工业自动化解决方案提供商,其产品广泛应用于工业控制、电子设备、医疗设备等领域。
为了实现这些产品之间的数据交互,欧姆龙推出了多种通讯协议,以下将介绍其中一些常见的种类。
1. 欧姆龙Host Link协议欧姆龙Host Link协议是一种用于欧姆龙PLC(可编程逻辑控制器)和上位机之间的数据通信协议。
通过该协议,用户可以在上位机上监控和控制PLC的运行状态,实现数据的读取和写入。
该协议具有简单、高效的特点,广泛应用于工业自动化领域。
2. 欧姆龙FINS协议欧姆龙FINS协议是一种用于欧姆龙各种设备之间进行数据通信的协议。
它支持多种通信方式,包括串口、以太网等。
通过该协议,用户可以实现不同设备之间的数据传输和控制命令的交互。
FINS协议具有高速、可靠的特点,被广泛应用于工业自动化控制系统。
3. 欧姆龙Ethernet/IP协议欧姆龙Ethernet/IP协议是一种基于以太网的工业自动化通信协议。
它可以实现不同设备之间的数据交互和控制命令的传输。
Ethernet/IP协议具有高速、可靠的特点,广泛应用于工业自动化网络中。
4. 欧姆龙Modbus协议欧姆龙Modbus协议是一种用于欧姆龙设备和其他设备之间进行数据通信的协议。
它是一种开放的通信协议,可以与其他厂家的设备进行兼容。
通过Modbus协议,用户可以实现设备之间的数据交互和控制命令的传输。
以上是一些常见的欧姆龙通讯协议种类,它们在工业自动化领域起到了重要的作用。
通过这些协议,不同设备之间可以实现数据的传输和控制命令的交互,提高了生产效率和自动化水平。
欧姆龙作为工业自动化领域的领先企业,不断推出新的通讯协议,以满足不同应用场景的需求。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
欧姆龙PLC通信协议
参考:W342--SYSMAC CS/CJ Series Communications Commands
欧姆龙通信命令可分为两类:
1:C-mode commands
只可通过串口通讯
2:FINS commands
既可通过串口通讯也可通过各类网络通信(适应性较强)
=============================================================================== 下面只讲FINS命令
一、命令发送:
FINS直连发送命令如下:
FINS command code见下表
命令后面紧跟着就是内存区域寻址,见下表
Command Code 后面紧跟着需要访问的地址,地址可分为按字地址或按位地址,取决于你需要访的的是字还是某一位。
由紧跟着Command Code后面的那个字节(I/O memory area designation)区分是读取字还是读取位,还是写入字或写入位,具体定义见下表:
按字地址:选取表中Data Type列中为Word的命令(命令在Memory area code内)
按字地址的三个地址位中,只使用前两个,最后一个字节为Ascii码”00”,其后跟两个字节为需要传输的数据量,然后紧跟着就是传输的数据,数据高位在前低位在后。
例如从H12开始读取7个字的数据,
命令为:0101 B2 001200 0007
例如将W3、W4、W5分别置数据1234、ABCD、7890,
命令为:0102 B1 000300 0003 1234ABCD7890
按位地址:选取表中Data Type列中为Bit的命令(命令在Memory area code内)
按位地址的三个地址位中,前两个指示位所在的字,最后一个字节指示位在字中的位置(0~15),其后跟两个字节为需要传输的数据量,然后紧跟着就是传输的数据,每一位的值用一个字节的数据代替,当寻址的位为0时用ascii码“0”代替,当寻址的位为1时用ascii 码“1”代替。
例如读取CIO100.03~CIO100.07这5位的数据
命令为:0101 30 010003 0005
例如将CIO101.01~CIO101.07分别置位0、0、1、0、1、1、1 命令为:0102 30 010101 0007 00 00 0100 01 01 01
例如将H25.14置1
命令为:0102 32 002514 0001 01
二、命令响应
FINS response code见下表
正常情况下FINS response code返回0000,当出现问题时,请根据FINS response code查找上表检查原因
返回的数据如果是按字寻址,则按数据高位在前低位在后的原则依次返回。
返回的数据如果是按位寻址,则以每位一个字节的原则依次返回。
最后介绍FCS校验码的计算方法,计算时只计算FCS以前的所有数据,计算方法如下:。