自动控制原理 吴怀宇 课后习题 第四章
自动控制原理 课后习题答案(2020年7月整理).pdf

第1章控制系统概述【课后自测】1-1 试列举几个日常生活中的开环控制和闭环控制系统,说明它们的工作原理并比较开环控制和闭环控制的优缺点。
解:开环控制——半自动、全自动洗衣机的洗衣过程。
工作原理:被控制量为衣服的干净度。
洗衣人先观察衣服的脏污程度,根据自己的经验,设定洗涤、漂洗时间,洗衣机按照设定程序完成洗涤漂洗任务。
系统输出量(即衣服的干净度)的信息没有通过任何装置反馈到输入端,对系统的控制不起作用,因此为开环控制。
闭环控制——卫生间蓄水箱的蓄水量控制系统和空调、冰箱的温度控制系统。
工作原理:以卫生间蓄水箱蓄水量控制为例,系统的被控制量(输出量)为蓄水箱水位(反应蓄水量)。
水位由浮子测量,并通过杠杆作用于供水阀门(即反馈至输入端),控制供水量,形成闭环控制。
当水位达到蓄水量上限高度时,阀门全关(按要求事先设计好杠杆比例),系统处于平衡状态。
一旦用水,水位降低,浮子随之下沉,通过杠杆打开供水阀门,下沉越深,阀门开度越大,供水量越大,直到水位升至蓄水量上限高度,阀门全关,系统再次处于平衡状态。
开环控制和闭环控制的优缺点如下表1-2 自动控制系统通常有哪些环节组成?各个环节分别的作用是什么?解:自动控制系统包括被控对象、给定元件、检测反馈元件、比较元件、放大元件和执行元件。
各个基本单元的功能如下:(1)被控对象—又称受控对象或对象,指在控制过程中受到操纵控制的机器设备或过程。
(2)给定元件—可以设置系统控制指令的装置,可用于给出与期望输出量相对应的系统输入量。
(3)检测反馈元件—测量被控量的实际值并将其转换为与输入信号同类的物理量,再反馈到系统输入端作比较,一般为各类传感器。
(4)比较元件—把测量元件检测的被控量实际值与给定元件给出的给定值进行比较,分析计算并产生反应两者差值的偏差信号。
常用的比较元件有差动放大器、机械差动装置和电桥等。
(5)放大元件—当比较元件产生的偏差信号比较微弱不足以驱动执行元件动作时,可通过放大元件将微弱信号作线性放大。
自动控制原理第4章 习题及解析
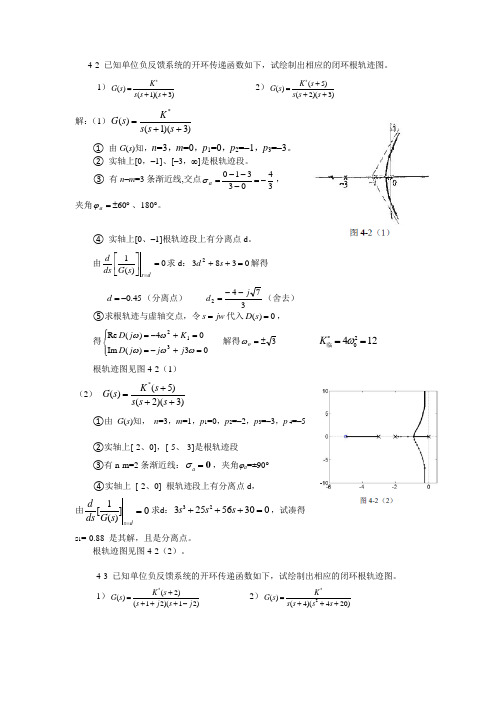
4-2 已知单位负反馈系统的开环传递函数如下,试绘制出相应的闭环根轨迹图。
1)*()(1)(3)K G s s s s =++ 2)*(5)()(2)(3)K s G s s s s +=++解:(1)()(1)(3)*K G s s s s =++① 由G (s )知,n =3,m =0,p 1=0,p 2=–1,p 3=–3。
② 实轴上[0,–1]、[–3,∞]是根轨迹段。
③ 有n –m =3条渐近线,交点3403310-=---=a σ, 夹角︒±=60a ϕ、180°。
④ 实轴上[0、–1]根轨迹段上有分离点d 。
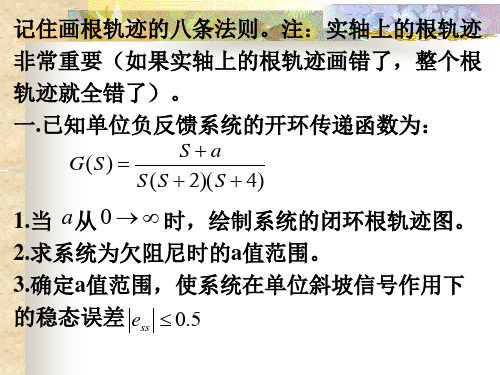
由0)(1=⎥⎦⎤⎢⎣⎡=ds s G ds d 求d :03832=++s d 解得 45.0-=d (分离点) 3742j d --=(舍去) ⑤求根轨迹与虚轴交点,令jw s =代入0)(=s D ,得⎪⎩⎪⎨⎧=+-==+-=03)(Im 04)(Re 312ωωωωωj j j D K j D 解得3±=o ω 20412*K ω==临根轨迹图见图4-2(1)(2) *(5)()(2)(3)K s G s s s s +=++①由 G (s )知, n =3,m =1,p 1=0,p 2=–2,p 3=–3,p 4=–5②实轴上[-2、0],[-5、-3]是根轨迹段 ③有n-m=2条渐近线:0a σ=,夹角ϕa =±90°④实轴上 [-2、0] 根轨迹段上有分离点d , 由1[]0()s dd ds G s ==求d :3232556300s s s +++=,试凑得 s 1=-0.88 是其解,且是分离点。
根轨迹图见图4-2(2)。
4-3 已知单位负反馈系统的开环传递函数如下,试绘制出相应的闭环根轨迹图。
1)*(2)()(12)(12)K s G s s j s j +=+++- 2)*2()(4)(420)K G s s s s s =+++解:(1)*(2)()(12)(12)K s G s s j s j +=+++-根轨迹图见图4-3(1)(2)*2()(4)(420)K G s s s s s =+++① n =4,m =0,p 1=0,p 2=–4,p 3、4=–2±j 4② p 1、p 2连线中点正好是p 3、p 4实部,开环极点分布对称于垂线s=–2,根轨迹也将对称于该垂线。
自动控制原理简明教程 第四章 根轨迹法 习题答案
(S S3 )(S 1)2 S (S 3)2 4
则解得:
(S S3 )(S 1)2 S (S 1)2 4(S 1)2 (S 4)(S 1)2
则 (S S3) S 4 S3 4 (另外一个闭环极点) 临界阻尼时的闭环传递函数为
(S)
(S
4(S 1) 4)(S 1)2
d d 2 d 1 j d 1 j
n
(
1
m
1 ) 求分离点的坐标公式
i1 d Pi i1 d Zi
解得:d 1
分离角: l
180 l
180 2
900
此时对应为T值:
(应使用模值方程求得)
T S S2 1T 1
S 1 j S 1 j
P1(-1,j)
T=0
Z2
Z1
-2
-1
0
T=∞
传递函数(写成零极点乘积形式) 解:系统结构图如下:
R(S) -
G(S)
C(S)
如果没有特别强调是正反馈,则单位反馈系统都 是单位负反馈系统。该题为参量根轨迹。 根轨迹方程:1 G(S) 1 4(S k) 0
S(S 1)(S 5)
特征方程:
D(S) S 3 6S 2 9S 4k 0
等效开环传递函数为:
G开 (S)
4k S(S
3)2
1
4k S (S 3)2
0
开环零点: m 0
开环极点: n 3, P1 0, P2 3, P3 3 则根轨迹有3条分支,有3条渐近线。
根轨迹与实轴的交点:
n
m
a
Pi Zi
i 1
i 1
nm
3 3 2 3
渐近线与实轴正方向夹角
自动控制原理课后习题第四章答案

G(s)H(s)=
Kr s(s+1)(s+3)
σ根 s=3-K+ω轨r4-3-迹+p4s132ω1-3的+~3ω32分p===s2-离+001K点.p-3r=3:KK~0θrr===012+ωω6021,o=3,=0+±1810.7o
8
jω
1.7
s1
A(s)B'系(s)统=根A'轨(s迹)B(s)
s3 p3
s=sK2±r没=j24有.8.6位×于2K.r根6=×4轨80.迹6=上7,. 舍去。
2
第四章习题课 (4-9)
4-9 已知系统的开环传递函数,(1) 试绘制出
根轨迹图。
G(s)H与(s虚)=轴s交(0点.01s+1K)(系0.统02根s+轨1迹)
jω
70.7
解: GKK(rr=s=)10H5(0s)=ωω2s1,(3=s=0+±17000K.7)r(s+50)
s1
A(s)B'(系s)统=A根'(轨s)迹B(s)
s3 p3
p2
p1
-4
-2
0
((24))ζ阻=尼03.振5s2荡+1响2应s+s的81==K-r0值0.7范+围j1.2
s=s-s10=3=.-80-56.8+50K.7r×=20=s.82-=54×-.631..1155×3.15=3.1
-2.8
450
1080
360
0σ
0σ
第四章习题课 (4-2)
4-2 已知开环传递函数,试用解析法绘制出系
统的根轨迹,并判断点(-2+j0),(0+j1),
自动控制原理_吴怀宇_课后习题2
11习题二2-1 试求题2-1图所示电路的微分方程和传递函数。
题2-1图2-2 试证明题2-2图所示的电路(a )与机械系统(b )具有相同的数学模型。
题2-2图2-3 试求题2-3图所示运算放大器构成的电路的传递函数。
题2-3图2-4 如题2-4图所示电路,二极管是一个非线性元件,其电流d i 与d u 间的关系为)1(10026.06-=-du d e i 。
假设电路中的Ω=310R ,静态工作点V u 39.20=,A i 301019.2-⨯=,试求在工作点),(00i u 附近)(d d u f i =的线性化方程。
题2-4图2-5 试简化题2-5图中各系统结构图,并求传递函数C (s )/R (s )。
题2-5图2-6试求题2-6图所示系统的传递函数C1(s)/R1(s),C2(s)/R1(s),C1(s)/R2(s)及C2(s)/R2(s)。
题2-6图2-7试绘制题2-7图所示系统的信号流图,并用Mason公式求系统的传递函数C(s)/R(s)。
题2-7图2-8试绘制题2-8图所示系统的信号流图,并用Mason公式求系统的传递函数C(s)/R(s)。
题2-8图2-9已知系统结构图如题2-9图所示,试写出系统在给定R(s)及扰动N(s)同时作用下输出C(s)的表达式。
题2-9图2-10系统的信号流图如题2-10图所示,试求系统的传递函数C(s)/R(s)。
题2-10图2-11已知单位负反馈系统的开环传递函数(1)试用MATLAB求系统的闭环传递函数;(2)将闭环传递函数表示为零极点形式和部分分式形式。
2-12如题2-12图所示系统结构图(1)试用MATLAB简化结构图,并计算系统的闭环传递函数;(2)绘制闭环传递函数的零极点图。
题2-12图。
自动控制原理第二版第四章课后答案

自动控制原理第二版第四章课后答案【篇一:《自动控制原理》第四章习题答案】4-1 系统的开环传递函数为g(s)h(s)?k*(s?1)(s?2)(s?4) 试证明点s1??1?j3在根轨迹上,并求出相应的根轨迹增益k*和开环增益k。
解若点s1在根轨迹上,则点s1应满足相角条件?g(s)h(s)??(2k?1)?,如图解4-1所示。
对于s1= -1+j3,由相角条件?g(s1)h(s1)?0??(?1?j3?1)??(?1?j3?2)??(?1?j3?4)? 0??2??3??6???满足相角条件,因此s1= -1+j3在根轨迹上。
将s1代入幅值条件: g(s1)h(s1?k*?1?1?j3?1??1?j3?2??1?j3?4k8*解出: k=12 ,k=*?324-2 已知开环零、极点如图4-2 所示,试绘制相应的根轨迹。
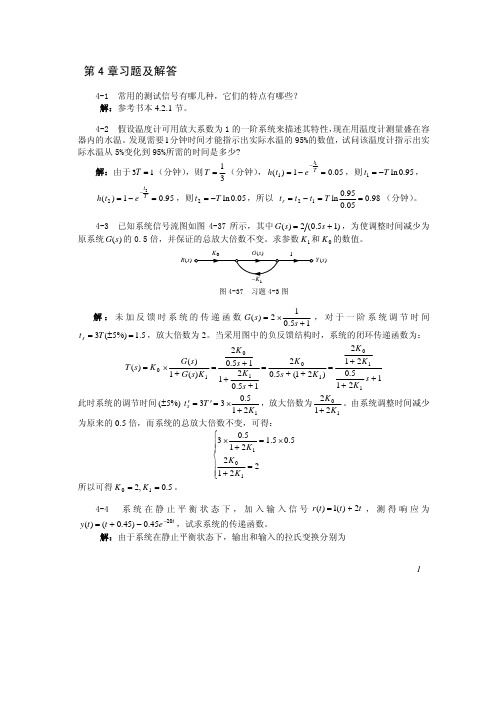
解根轨如图解4-2所示:4-3 单位反馈系统的开环传递函数如下,试概略绘出系统根轨迹。
⑴ g(s)?ks(0.2s?1)(0.5s?1)k(s?5)s(s?2)(s?3)* ⑵ g(s)?⑶ g(s)?k(s?1)s(2s?1)解⑴ g(s)?ks(0.2s?1)(0.5s?1)=10ks(s?5)(s?2)系统有三个开环极点:p1?0,p2= -2,p3 = -5①实轴上的根轨迹:???,?5?, ??2,0?0?2?57?????a??33②渐近线: ????(2k?1)????,?a?33?③分离点:1d?1d?5?1d?2?0解之得:d1??0.88,d2?3.7863(舍去)。
④与虚轴的交点:特征方程为 d(s)=s3?7s2?10s?10k?0?re[d(j?)]??7?2?10k?0令 ? 3im[d(j?)]????10??0?解得?????k?7。
根轨迹如图解4-3(a)所j)与虚轴的交点(0,?示。
⑵根轨迹绘制如下:①实轴上的根轨迹:??5,?3?, ??2,0?0?2?3?(?5)????0a??2②渐近线: ????(2k?1)????a?22?③分离点: 1d?1d?2?1d?3?1d?5用试探法可得 d??0.886。
自动控制原理课后习题第四章答案

然后,根据闭环传递函数的定义,闭环传递函数F(s)=G(s)/(1+G(s)H(s))。
解析3
将G(s)H(s)代入闭环传递函数的定义中,得到F(s)=100/((s+1)^2+3)/(1+100/((s+1)^2+4)((s+1)^2+3))。
解析4
化简得到F(s)=100/((s+1)^2+3)(4((s+1)^2+3))=400/(4(s^2+2s+3))。
1)(s + 2)/(s^2 + 3s + 2)。
04
题目四答案
题目内容
• 题目四:已知系统的开环传递函数为 G(s)H(s)=K/(s^2+2s+2),其中K>0,试 求系统的闭环极点和稳定性。
答案解析
闭环极点
根据开环传递函数,我们可以求出闭环传递函数为 G(s)H(s)/(1+G(s)H(s)),然后求出闭环极点。由于开环传递函 数为K/(s^2+2s+2),所以闭环极点为-1±√2i。
标准形式,即 G(s)H(s) = (s + 1)(s + 2)/(s^2 + 3s + 2)。
02
解析二
根据开环传递函数的分子和分母,可以得出系统的开环传递函数为
G(s)H(s) = (s + 1)(s + 2)/(s^2 + 3s + 2)。
03
解析三
根据开环传递函数,可以求出系统的闭环传递函数为 G(s)H(s) = (s +
自动控制原理课后习题第四章 答案
自动控制原理 4-5章习题与解答习题课后校对稿
可知: K 增大时, % , t p 。
4
4-9 设电子心率起搏器系统如图 4-41 所示,其中模仿心脏的传递函数相当于一个纯积 分器。要求:
(1)若 0.5 对应于最佳响应情况,问该情况下起搏器的增益 K 应为多大?
(2)若期望心速为 60 次/min,并突然接通起搏器,问 1 s 后实际心速为多少?瞬时最大 心率为多大?
10(s 2) , s2 (s 20)
以及 R(s) 1 s
2 s2
则 T (s) Y (s) 10 。 R(s) s 20
4-5 某控制系统结构图如图 4-38 所示,其中 K1 5 , T1 0.5 。 (1)求系统的单位阶跃响应; (2)计算系统的性能指标 tr , t p , ts ( 5% ), % ;
T1 5T1
(1)该系统的单位阶跃响应为
y(t) 2.51
e nt 1 2
sin(d t
)
2.51
23 3
e nt
sin(
3t
)
3
2.51
1.1547e t
sin(1.7321t
3
)
(2)系统的性能指标为:
解之得: K 25 , n 25
(2)闭环传递函数写为: T (s)
s2
625 25s 625
,闭环极点 s1,2
12.5
j12.5
3。
方法一:系统的阶跃响应为
y(t) 1
1 1
2
e nt
sin( n
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第四章4-1已知单位反馈系统的开环传递函数为()(1)(2)KG s s s s =++ 试绘制该系统在正、负反馈情况下的根轨迹图。
解:(1)负反馈情况令(1)(2)=0s s s ++,解得 3个开环极点1230,1,2p p p ==-=-根轨迹分支数为3,起点分别为(0,0),(1,0),(2,0)j j j -- 终点均为无穷远处。
在实轴上的根轨迹为(][],2,1,0-∞--两段。
由n=3,m=0得轨迹有3条渐近线,它们在实轴上的交点坐标111n mi ji j a p zn mσ==-==--∑∑渐近线与实轴正方向的夹角为2121=3a k k n m ππϕ++=-()(),(k=0,1,2)当k=0,1,2时,计算得a ϕ分别为60°,180°,-60° 确定分离点,由111++=012d d d ++解得120.42, 1.58d d =-=-由于2d 不是根轨迹上的点,故不是分离点,分离点坐标为1d确定根轨迹与虚轴的交点:控制系统特征方程3232=0s s s K +++令=s j ω 代入上式得3232=0j j K ωωω--++ 写出实部和虚部方程233=020K ωωω⎧-⎪⎨-=⎪⎩可求得=006K K ωω⎧⎧=⎪⎨⎨==⎪⎩⎩因此,根轨迹在ω=6K =;另外实轴上的根轨迹分支在0ω=处与虚轴相交。
负反馈系统根轨迹如下图所示(2)正反馈情况令(1)(2)=0s s s ++,解得 3个开环极点1230,1,2p p p ==-=-根轨迹分支数为3,起点分别为(0,0),(1,0),(2,0)j j j -- 终点均为无穷远处。
在实轴上的根轨迹为[](]2,1,0,--+∞两段。
由n=3,m=0得轨迹有3条渐近线,它们在实轴上的交点坐标111n mi ji j a p zn mσ==-==--∑∑渐近线与实轴正方向的夹角为2=3a k πϕ,(k=0,1,2)当k=0,1,2时,计算得a ϕ分别为0°,120°,-120° 确定分离点,由111++=012d d d ++解得120.42, 1.58d d =-=-由于1d 不是根轨迹上的点,故不是分离点,分离点坐标为2d确定根轨迹与虚轴的交点:控制系统特征方程3232-=0s s s K ++将=s j ω 代入上式得3232-=0j j K ωωω--+ 写出实部和虚部方程23-3=020K ωωω⎧-⎪⎨-=⎪⎩可求得=00-6K K ωω⎧⎧=⎪⎨⎨==⎪⎩⎩ 因此,根轨迹在0ω=处与虚轴相交。
正反馈系统根轨迹如下图所示 4-2设系统的开环传递函数为(+)()(s)()()K s z G s H z p s s p =>+绘制根轨迹图,证明根轨迹的复数部分是圆,并求出圆的圆心和半径。
解:系统实轴上的根轨迹为[](],,,0z p -∞- 根轨迹分离点坐标满足111+=d d p d z++解得12d z d z =-=- 系统闭环特征方程2()+=0s p K s Kz ++解得1,2=-2p Ks +±令=-,2p Kx y +=2222222()()=(z-)()244()()44p K p K x z z z p K Kz p K p K y Kz +++=-++-++==-两式相加得222()=x z y z zp ++- 又分离点d到开环零点距离r=d z -=即2222()r =()x z y d z ++=-故根轨迹的复数部分是圆,圆心为零点,半径为零点到分离点之间的距离。
根轨迹图如下:4-3已知单位负反馈系统的开环传递函数,试绘制根轨迹图。
(1)(2)()(1)(3)K s G s s s s +=++ (2)2(1)()(0.11)K s G s s s +=+(3)(5)()(1)(3)K s G s s s +=++ (4)2(1)()K s G s s += (5)2(4)()(1)K s G s s +=+ (6)2(0.2)()( 3.6)K s G s s s +=+解:(1)由开环传递函数可知,系统有1个开环零点12z =- 3个开环极点1230,1,3p p p ==-=-根轨迹分支数为3,起点分别为(0,0),(1,0),(3,0)j j j -- 一个终点为(2,0)j - 另两个终点为无穷远处。
在实轴上的根轨迹为(][]3,2,1,0---两段。
由n=3,m=1得轨迹有2条渐近线,它们在实轴上的交点坐标111n mi ji j a p zn mσ==-==--∑∑渐近线与实轴正方向的夹角为2121=2a k k n m ππϕ++=-()(),(k=0,1)当k=0,1时,计算得a ϕ分别为-90°,90° 则系统根轨迹如下图所示(2)由开环传递函数可知,系统有1个开环零点11z =- 3个开环极点1230,0,10p p p ===-根轨迹分支数为3,起点分别为(0,0),(0,0),(10,0)j j j - 一个终点为(1,0)j - 另两个终点为无穷远处。
在实轴上的根轨迹为[]10,1--段。
由n=3,m=1得轨迹有2条渐近线,它们在实轴上的交点坐标114.5n mi ji j a p zn mσ==-==--∑∑渐近线与实轴正方向的夹角为2121=2a k k n m ππϕ++=-()(),(k=0,1)当k=0,1时,计算得a ϕ分别为-90°,90° 确定分离点,由1111++=101d d d d ++解得124, 2.5d d =-=- 确定根轨迹与虚轴的交点:控制系统特征方程320.1=0s s Ks K +++将=s j ω 代入上式可求得=0K ω⎧⎨=⎩则系统根轨迹如下图所示(3)由开环传递函数可知,系统有1个开环零点15z =- 2个开环极点121,3p p =-=-根轨迹分支数为2,起点分别为(1,0),(3,0)j j --,终点分别为(5,0)j -和无穷远处。
在实轴上的根轨迹为(][],5,3,1-∞---两段。
轨迹有1条渐近线,它与实轴上的交点坐标111n mi ji j a p zn mσ==-==-∑∑渐近线与实轴正方向的夹角为21=21a a k k n mπϕπϕπ+=+=-()(),(k=0)则确定分离点,由111+=135d d d +++解得1255d d =-+=-- 确定根轨迹与虚轴的交点:控制系统特征方程2(4)35=0s K s K ++++将=s j ω代入上式可求得=0,3-45K K ωω⎧⎧⎪⎪⎨⎨==-⎪⎩⎪⎩均舍去 则系统根轨迹如下图所示(4)由开环传递函数可知,系统有1个开环零点11z =- 2个开环极点120,0p p ==根轨迹分支数为2,起点分别为(0,0),(0,0)j j ,终点分别为(1,0)j -和无穷远处。
在实轴上的根轨迹为(],1-∞-段。
轨迹有1条渐近线,它与实轴上的交点坐标111n mi ji j a p zn mσ==-==-∑∑渐近线与实轴正方向的夹角为21=21a a k k n mπϕπϕπ+=+=-()(),(k=0)则确定分离点,由111+=1d d d +解得2d =-,则分离点为()2,0j - 则系统根轨迹如下图所示(5)由开环传递函数可知,系统有1个开环零点14z =- 2个开环极点121,1p p =-=-根轨迹分支数为2,起点分别为(1,0),(1,0)j j --,终点分别为(4,0)j -和无穷远处。
在实轴上的根轨迹为(],4-∞-段。
轨迹有1条渐近线,它与实轴上的交点坐标112n mi ji j a p zn mσ==-==-∑∑渐近线与实轴正方向的夹角为21=21a a k k n mπϕπϕπ+=+=-()(),(k=0)则确定分离点,由111+=114d d d +++解得7d =- 则系统根轨迹如下图所示(6)由开环传递函数可知,系统有1个开环零点10.2z =- 3个开环极点1230,0, 3.6p p p ===-根轨迹分支数为3,起点分别为(0,0),(0,0),( 3.6,0)j j j -,终点分别为(0.2,0)j -和无穷远处。
在实轴上的根轨迹为(]3.6,0.2--段。
轨迹有2条渐近线,它与实轴上的交点坐标111.7n mi ji j a p zn mσ==-==--∑∑渐近线与实轴正方向的夹角为2121=22a a k k n m πππϕϕ++==±-()(),(k=0,1)则确定分离点,由1111+=3.60.2d d d d +++解得121.67,0.43d d =-=-则系统根轨迹如下图所示4-5已知系统如下图所示,试绘制根轨迹图。
解:由图可知系统的开环传递函数为32()()22KG s H s s s s=++令3222=0s s s ++,解得 3个开环极点1230,1,1p p j p j ==-+=--根轨迹分支数为3,起点分别为(0,0),(1,)(1,)j j j ---和,终点分别为(5,0)j -和无穷远处。
在实轴上的根轨迹为(],0-∞段。
轨迹有3条渐近线,它与实轴上的交点坐标1123n mi ji j a p zn mσ==-==--∑∑ 渐近线与实轴正方向的夹角为2121=3a k k n m ππϕ++=-()(),(k=0,1,2)当k=0,1,2时,计算得a ϕ分别为60°,180°,-60° 确定分离点,由111++=0(1)(1)d d j d j --+---无解得 无分离点 确定根轨迹与虚轴的交点:控制系统特征方程3222=0s s s K +++将=s j ω代入上式可求得=0=,04K K ωω⎧⎧⎪⎨⎨==⎪⎩⎩由11(21)()m npi zjpi pjpi j j j ik θπϕθ==≠=++-∑∑得出射角为321,,44p p p ππθθθπ==-=则系统根轨迹如下图所示。