自动控制原理课后习题答案
(完整版)自动控制原理课后习题答案
第一章引论1-1 试描述自动控制系统基本组成,并比较开环控制系统和闭环控制系统的特点。
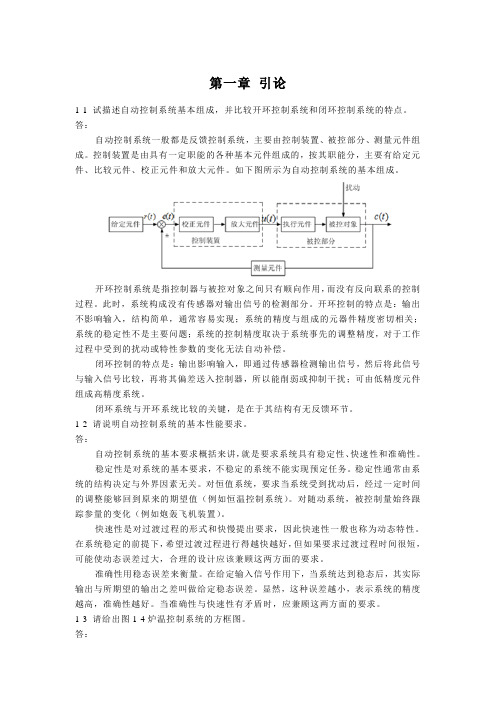
答:自动控制系统一般都是反馈控制系统,主要由控制装置、被控部分、测量元件组成。
控制装置是由具有一定职能的各种基本元件组成的,按其职能分,主要有给定元件、比较元件、校正元件和放大元件。
如下图所示为自动控制系统的基本组成。
开环控制系统是指控制器与被控对象之间只有顺向作用,而没有反向联系的控制过程。
此时,系统构成没有传感器对输出信号的检测部分。
开环控制的特点是:输出不影响输入,结构简单,通常容易实现;系统的精度与组成的元器件精度密切相关;系统的稳定性不是主要问题;系统的控制精度取决于系统事先的调整精度,对于工作过程中受到的扰动或特性参数的变化无法自动补偿。
闭环控制的特点是:输出影响输入,即通过传感器检测输出信号,然后将此信号与输入信号比较,再将其偏差送入控制器,所以能削弱或抑制干扰;可由低精度元件组成高精度系统。
闭环系统与开环系统比较的关键,是在于其结构有无反馈环节。
1-2 请说明自动控制系统的基本性能要求。
答:自动控制系统的基本要求概括来讲,就是要求系统具有稳定性、快速性和准确性。
稳定性是对系统的基本要求,不稳定的系统不能实现预定任务。
稳定性通常由系统的结构决定与外界因素无关。
对恒值系统,要求当系统受到扰动后,经过一定时间的调整能够回到原来的期望值(例如恒温控制系统)。
对随动系统,被控制量始终跟踪参量的变化(例如炮轰飞机装置)。
快速性是对过渡过程的形式和快慢提出要求,因此快速性一般也称为动态特性。
在系统稳定的前提下,希望过渡过程进行得越快越好,但如果要求过渡过程时间很短,可能使动态误差过大,合理的设计应该兼顾这两方面的要求。
准确性用稳态误差来衡量。
在给定输入信号作用下,当系统达到稳态后,其实际输出与所期望的输出之差叫做给定稳态误差。
显然,这种误差越小,表示系统的精度越高,准确性越好。
当准确性与快速性有矛盾时,应兼顾这两方面的要求。
自动控制原理_孟华_习题答案
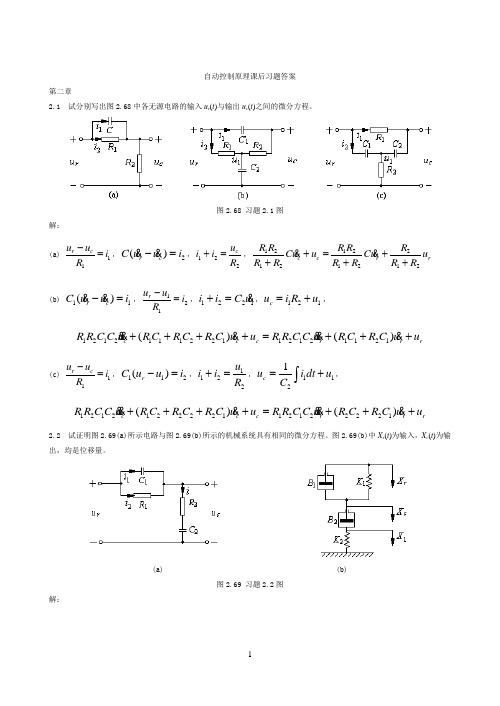
自动控制原理课后习题答案第二章2.1 试分别写出图2.68中各无源电路的输入u r (t )与输出u c (t )之间的微分方程。
图2.68 习题2.1图解:(a)11r c u u i R -=,2()r c C uu i -= ,122c ui i R +=,12122121212c c r r R R R R R Cu u Cu u R R R R R R +=++++(b)11()r c C uu i -= ,121r u u i R -=,1221i i C u+= ,121c u i R u =+, 121211122112121121()()c c c r r r R R C C uR C R C R C u u R R C C u R C R C u u ++++=+++ (c)11r cu u i R -=,112()r C u u i -=,1122u i i R +=,1121cu i dt u C =+⎰, 121212222112122221()()c c c r r r R R C C u RC R C R C u u R R C C u R C R C u u ++++=+++2.2 试证明图2.69(a)所示电路与图2.69(b)所示的机械系统具有相同的微分方程。
图2.69(b)中X r (t )为输入,X c (t )为输出,均是位移量。
(a) (b)图2.69 习题2.2图解:(a)11r cu u i R -=,12()r c C u u i -= ,12i i i +=,221c u idt iR C =+⎰,121211122212121122()()c c c r r r R R C C uR C R C R C u u R R C C u R C R C u u ++++=+++ (b)2121()c B xx K x -= ,1121()()()r c r c c B x x K x x B x x -+-=- , 121221212121211212()()c c c r r r B B B B B B B B Bx x x x x x K K K K K K K K K ++++=+++ 2.3 试分别求出图2.70中各有源电路的输入u r (t )与输出u c (t )之间的微分方程。
自动控制原理课后答案
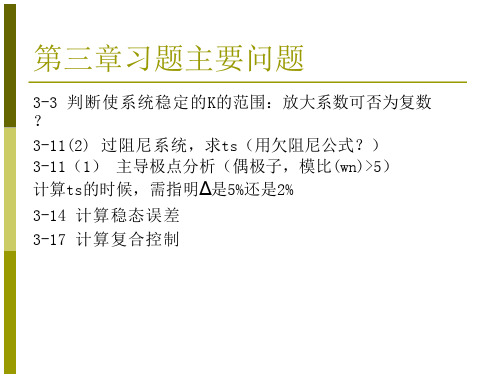
3-3 判断使系统稳定的K的范围:放大系数可否为复数 ? 3-11(2) 过阻尼系统,求ts(用欠阻尼公式?) 3-11(1) 主导极点分析(偶极子,模比(wn)>5)
计算ts的时候,需指明Δ是5%还是2%
3-14 计算稳态误差 3-17 计算复合控制
自动控制原理习题分析第三章3-1(1)
自动控制原理习题分析第三章3-17
自动控制原理习题分析第三章3-17
自动控制原理习题分析第三章3-17
自动控制原理习题分析第三章3-17
自动控制原理习题分析第三章3-1(1)
自动控制原理习题分析第三章3-1(4)
自动控制原理习题分析第三章3-2(3)
自动控制原理习题分析第三章3-2(3)
自动控制原理习题分析第三章3-2(4)
自动控制原理习题分析第三章3-2(4)
自动控制原理习题分析第三章3-3(2)
自动控制原理习题分析第三章3-3(2)
自动控制原理习题分析第三章3-6
自动控制原理习题分析第三章3-6
自动控制原理习题分析第三章3-8
自动控制原理习题分析第三章3-8
自动控制原理习题分析第三章3-9
自动控制原理习题分析第三章3-9
自动控制原理习题分析第三章3-11(1)
自动控制原理习题分析第三章3-11(1)
自动控制原理习题分析第三章3-11(1)
自动控制原理习题分析第三章3-11(1)
自动控制原理习题分析第三章3-11(2)
自动控制原理习题分析第三章3-14
自动控制原理习题分析第三章3-14
自动控制原理习题分析第三章3-14
自动控制原理习题分析第三章3-14
自动控制原理习题分析第三章3-17
自动控制原理课后习题
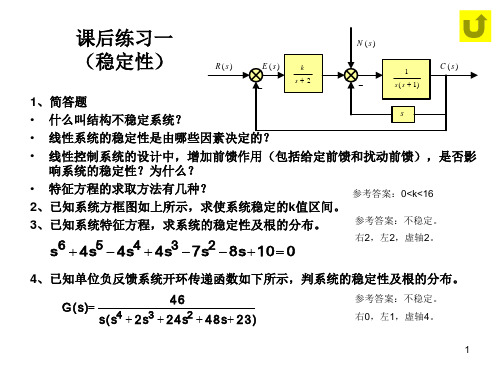
分析稳定性,若稳定计
算性能指标。
G
(
s
)
(
s
1
)
1 (0
0 .
0
1
s
1
)2
1、环节特性分析
2、Bode曲线的绘制 3、性能指标计算 结论:系统稳定。
ωc≈10;
令 得
::(t gωγ111ω)88014128.02013ltt8ggωg01101c100.0c021tωg11 0.ω10c8101100
0
(-1,j0)
已知:Gk
(s)
k s(Ts 1)
得:P
1, q
1
绘制Nyquist曲线
N p 2(a b) 1 2(0 0.5) 2
结论:不稳定,右半平面有两个特征根。
0
(1)T1>T2 (-1,j0)
0 (2) T1<T2
已知:Gk
(s)
k(T2 s 1) , s 2 (T1s 1)
其中:( Ta ) 或( Ta )
2)分析两种情况下系统的稳定性.
3、某最小相位系统的如图所示。
1)求传递函数 2)求剪切频率和相角裕量
G k( s )
k(10s 1)2
s2 s 1(Ts 1)
(10s 1)2
s2 s 1(0.003 s
1)
c 100 , 73.76
4、已知单位反馈系统的
(-1,j0)
0
(2)
(1)
0
(-1,j0)
已知:P 2, q 0
已知:G(s) k , p 1,q 0,绘制Nyquist曲线,系统1: k 1;系统2 : k 1。 (Ts 1)
(完整版)自动控制原理课后习题及答案
第一章绪论1-1 试比较开环控制系统和闭环控制系统的优弊端.解答: 1 开环系统(1)长处 :构造简单,成本低,工作稳固。
用于系统输入信号及扰动作用能早先知道时,可获得满意的成效。
(2)弊端:不可以自动调理被控量的偏差。
所以系统元器件参数变化,外来未知扰动存在时,控制精度差。
2闭环系统⑴长处:不论因为扰乱或因为系统自己构造参数变化所惹起的被控量偏离给定值,都会产生控制作用去消除此偏差,所以控制精度较高。
它是一种按偏差调理的控制系统。
在实质中应用宽泛。
⑵弊端:主要弊端是被控量可能出现颠簸,严重时系统没法工作。
1-2什么叫反应?为何闭环控制系统常采纳负反应?试举例说明之。
解答:将系统输出信号引回输入端并对系统产生控制作用的控制方式叫反应。
闭环控制系统常采纳负反应。
由1-1 中的描绘的闭环系统的长处所证明。
比如,一个温度控制系统经过热电阻(或热电偶)检测出目前炉子的温度,再与温度值对比较,去控制加热系统,以达到设定值。
1-3试判断以下微分方程所描绘的系统属于何种种类(线性,非线性,定常,时变)?2 d 2 y(t)3 dy(t ) 4y(t ) 5 du (t ) 6u(t )(1)dt 2 dt dt(2) y(t ) 2 u(t)(3)t dy(t) 2 y(t) 4 du(t) u(t ) dt dtdy (t )u(t )sin t2 y(t )(4)dtd 2 y(t)y(t )dy (t ) (5)dt 2 2 y(t ) 3u(t )dt(6)dy (t ) y 2 (t) 2u(t ) dty(t ) 2u(t ) 3du (t )5 u(t) dt(7)dt解答: (1)线性定常(2)非线性定常 (3)线性时变(4)线性时变(5)非线性定常(6)非线性定常(7)线性定常1-4 如图 1-4 是水位自动控制系统的表示图, 图中 Q1,Q2 分别为进水流量和出水流量。
控制的目的是保持水位为必定的高度。
自动控制原理课后参考答案

第一章1-1图1-2是液位自动控制系统原理示意图。
在任意情况下,希望液面高度c维持不变, 试说明系统工作原理并画岀系统方块图。
图1-2 液位自动控制系统解:被控对象:水箱;被控量:水箱的实际水位;给定量电位器设定水位U r(表征液位的希望值C r);比较元件:电位器;执行元件:电动机;控制任务:保持水箱液位高度不变。
工作原理:当电位电刷位于中点(对应U r)时,电动机静止不动,控制阀门有一定的开度,流入水量与流出水量相等,从而使液面保持给定高度C r,一旦流入水量或流出水量发生变化时,液面高度就会偏离给定高度C r。
当液面升高时,浮子也相应升高,通过杠杆作用,使电位器电刷由中点位置下移,从而给电动机提供一定的控制电压,驱动电动机,通过减速器带动进水阀门向减小开度的方向转动,从而减少流入的水量,使液面逐渐降低,浮子位置也相应下降,直到电位器电刷回到中点位置,电动机的控制电压为零,系统重新处于平衡状态,液面恢复给定高度r。
反之,若液面降低,则通过自动控制作用,增大进水阀门开度,加大流入水量,使液面升高到给定高度C r。
系统方块图如图所示:1-10 下列各式是描述系统的微分方程,其中c(t)为输岀量,r (t)为输入量,试判断哪些是线性定常或时变系统,哪些是非线性系统?2c(t) =5 r2(t) t d2(^(1) dt ;3 2d c(t) 3d c(t) 6dc(t) --- 3 3 ---- 2 6 — dt dt dt xdc(t) dr(t)t c(t) =r(t) 3 dt dtc(t) = r(t)cos t 5 ;dr (t) tc(t) =3r(t)6 5 r(.)d. (5) dt =;(6)c(t)訂 2 ⑴;0, t ::: 6c(t)= “r(t), t 畠 6.(7) -解:(1)因为c(t)的表达式中包含变量的二次项 『(t),所以该系统为非线性系统。
(2) 因为该微分方程不含变量及其导数的高次幕或乘积项,且各项系数均为常数,所以该 系统为线性定常系统。
自动控制原理课后习题答案
第一章引论1-1 试描述自动控制系统基本组成,并比较开环控制系统和闭环控制系统的特点。
答:自动控制系统一般都是反馈控制系统,主要由控制装置、被控部分、测量元件组成。
控制装置是由具有一定职能的各种基本元件组成的,按其职能分,主要有给定元件、比较元件、校正元件和放大元件。
如下图所示为自动控制系统的基本组成。
开环控制系统是指控制器与被控对象之间只有顺向作用,而没有反向联系的控制过程。
此时,系统构成没有传感器对输出信号的检测部分。
开环控制的特点是:输出不影响输入,结构简单,通常容易实现;系统的精度与组成的元器件精度密切相关;系统的稳定性不是主要问题;系统的控制精度取决于系统事先的调整精度,对于工作过程中受到的扰动或特性参数的变化无法自动补偿。
闭环控制的特点是:输出影响输入,即通过传感器检测输出信号,然后将此信号与输入信号比较,再将其偏差送入控制器,所以能削弱或抑制干扰;可由低精度元件组成高精度系统。
闭环系统与开环系统比较的关键,是在于其结构有无反馈环节。
1-2 请说明自动控制系统的基本性能要求。
答:自动控制系统的基本要求概括来讲,就是要求系统具有稳定性、快速性和准确性。
稳定性是对系统的基本要求,不稳定的系统不能实现预定任务。
稳定性通常由系统的结构决定与外界因素无关。
对恒值系统,要求当系统受到扰动后,经过一定时间的调整能够回到原来的期望值(例如恒温控制系统)。
对随动系统,被控制量始终跟踪参量的变化(例如炮轰飞机装置)。
快速性是对过渡过程的形式和快慢提出要求,因此快速性一般也称为动态特性。
在系统稳定的前提下,希望过渡过程进行得越快越好,但如果要求过渡过程时间很短,可能使动态误差过大,合理的设计应该兼顾这两方面的要求。
准确性用稳态误差来衡量。
在给定输入信号作用下,当系统达到稳态后,其实际输出与所期望的输出之差叫做给定稳态误差。
显然,这种误差越小,表示系统的精度越高,准确性越好。
当准确性与快速性有矛盾时,应兼顾这两方面的要求。
自动控制原理课后习题答案
R1R2C1C2d2du22(tt)(R1C1R2C2R1C2)dd2u(tt)u2(t) v(t)
R1C1ddV (tt)V(t)
输入
(b) 以电压u3(t)为输出量,列写微分方程为:
u1(t)
C1
R1 R2
C2
R1R2C 1C2d2d u32(tt)(R1C 1R2C2)dd3u (t)t(R1C21)u3(t)
y=x3+x4=G2x2+G4x2=(G2+G4)G1x1
y=(G2+G4)G1x1
G(s)=Y(s)/U(s)=(G2+G4)G1/(1+G3G2G1)
作业:2.59题 把图2.75改画为信号流图,并用Mason公式求u到y传递函数
方框图
u(S)
__
G1(s)
G5(s)
—
y(S)
G2(s)
—
G3(s)
essfls i0m se(s)1K K21K2
(b)当r(t)=1(t),f(t)=1(t)时的ess。 解:求输入误差传递函数,直接代数计算法:
根据电路定律写出单体微分方程式(2.2.2)和 (2.2.3)。把特征受控量uc(t)选作输出量,依 据式(2.2.2)和(2.2.3),消除中间量i(t) , 则可得到输入输出微分方程(2.2.4)。
3、利用Laplace变换求出传递函数
R
L
+
+
u(t) i(t)
输入
_
+ uc(t) _
y
输出
_
U(t)Ld dtiR i uC
自动控制原理课后习题答案
第二章作业 概念题:传递函数定义:
单输入输出线性定常系统的传递函数,定义为零初始条件下,系统输出 量的拉氏变换像函数与输入量的拉氏变换像函数之比。
自动控制原理_课后答案(孙亮_杨鹏_着)_北京工业大学出版社
4
2-4 求出题图所示时间信号 f (t ) 的拉氏变换 F ( s) 。
f(t) t0 0 t0
(a) 题解:
f(t)
半波正弦
t
A 0
f(t) M t 0 -M T
占空比=ηT
t 0<η<1
π/ω
( b)
习题 2-4
(c)
f(t) f1(t) t
0
(a) 由于信号 f (t ) 可以分解为信号的组合如图所示,
F = K x ⋅ x + Ki ⋅ i = −
解毕。
μ 0 S ( Ni0 ) 2
3 2 x0
x+
μ 0 SN 2i0
2 2 x0
i
2-3 求下列时间函数 f (t ) 的拉氏变换 F ( s) 。 (a) f (t ) = 0.5(1 − cos 5t )
(b) f (t ) = e
cos 314t π (c) f (t ) = sin(5t + ) 3 2 −3 t (d) f (t ) = t ⋅ e
f(t)
M 0 -M
占空比 =ηT
T
已知 F1 ( s) ,则周期信号的拉氏变换为
所以占空比为η的方波脉冲信号的拉氏变换为
F (s) =
解毕。
1 M 1 − 2e −ηTs + e −Ts ⋅ F ( s ) = ⋅ 1 s 1 − e −Ts 1 − e −Ts
2-5 已知下列拉氏变换 F ( s) ,求出时间表达式 f (t ) ,并画出曲线草图。
1 = 1 + e −Ts + e − 2Ts + Λ 1 − e −Ts
作拉氏反变换,有
自动控制原理课后答案
自动控制原理课后答案1. 根据反馈控制原理,系统的控制目标是通过比较输出信号与参考信号之间的差异,对系统的输入进行调整,使系统达到期望的状态或行为。
2. 控制系统一般包括传感器、执行器和控制器三个基本组成部分。
传感器用于收集系统的实时数据,执行器用于执行调整系统输入的指令,控制器则根据传感器采集的数据来计算和调整控制信号。
3. 反馈控制系统中,控制器根据系统的输出信号和参考信号之间的差异进行调整。
比例控制器(P控制器)只根据差异的大小,线性比例地调整控制信号;积分控制器(I控制器)不仅考虑差异的大小,还考虑差异的累积量;微分控制器(D控制器)则考虑差异的变化率。
4. P控制器适用于稳态差异较大的系统,可以快速调整系统输出至参考信号附近,但容易产生超调现象;I控制器适用于存在稳态差异的系统,可以逐渐消除稳态差异,但容易产生震荡现象;D控制器适用于存在瞬态差异的系统,可以抑制系统的瞬态响应,但无法消除稳态差异。
5. 比例积分微分控制器(PID控制器)是一种综合了P、I和D控制器的控制器。
通过合理地调整比例、积分和微分系数,可以实现系统的快速响应和稳定。
6. 开环控制系统和闭环控制系统都可以实现对系统的控制,但闭环控制系统更加稳定和鲁棒。
开环控制系统中,控制器不根据系统的反馈信号来调整控制信号,容易受到外部干扰和参数变化的影响。
7. 可以使用根据控制对象的动态特性设计的控制器来提高系统的控制性能。
常见的控制器设计方法包括根据稳态误差的允许范围来选取比例、积分和微分系数,以及根据系统传递函数进行校正和补偿。
8. 多变量控制系统可以同时控制多个输入和多个输出。
常见的多变量控制系统包括串级控制、并联控制和内模控制等。
9. 控制系统的稳定性是指当系统接受一定的输入时,输出是否趋于稳定。
稳定性的判断可以通过判断系统的传递函数的极点位置来确定。
10. 控制系统的仿真和实验可以通过使用计算机软件进行模拟仿真,或搭建实际的物理实验平台进行。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
• 20世纪40年代,Evans提出并完善了根轨迹法。
• 20世纪50年代末,最优控制系统设计。
• 20世纪50年代末,基于时域分析的现代控制理 论。
• 60年代~80年代:最优控制、随机系统的最优控 制、复杂系统的自适应控制和学习控制得到了研 究。
5. 干扰量(Disturbance):引起被控量偏离预定运 行规律的量。除给定值之外,凡能引起被控量变 化的因素,都是干扰。干扰又称扰动
6.反馈(Feedback):将系统输出量引回输入端,并 与参考输入进行比较的过程。
7.前向通路 (Forward Channel):从给定量到被控 量的通道。
缺点: 闭环控制系统的参数如果匹配得不好,会造成被控量的 较大摆动,甚至系统无法正常工作。
例: 飞机自动驾驶控制
被控对象: 飞机
被控量: 飞机的俯仰角 θ
控制任务:系统在任何扰动作用下,保持飞机俯仰角不变。
仰俯角控制系统方块图
IV 复合控制
开环控制和闭环控制相结合的一种控制。实质上,它是在 闭环控制回路的基础上,附加了一个输入信号或扰动作用 的顺馈通路,来提高系统的控制精度。
an
d
n n
c(t
)
dt n
+
an-1
d n-1n-1c(t ) dt n-1
+"+
a1
dc(t) dt
+
a0c(t )
=
bm
d m m r (t ) dt m
+ bm-1
d m-1m-1r (t ) dt m-1
+" + b1
dr(t) dt
+
b0 r (t )
式中:r(t)——系统输入量; c(t)——系统输出量 主要特点是具有齐次性和叠加性。
电机调速系统
2 随动系统( Tracking Control) 特点:输入信号是一个未知函数。要求控制系统的 输出量跟随输入信号变化。
地面弹炮防空系统
硬盘控制器
3 过程控制系统(程序控制系统 Process Control)
特点:输入信号是一个已知的函数。系统的控制过程 按预 定的程序进行,要求被控量能迅速准确地复现输入,如化
测量实际液面的高度h1 -------用眼
实际液面高度h1与希望液面高度h0相 比较-------用脑
按比较的结果,即液面高度偏差的正 负去决定控制动作-------用手
• 自动控制
人工控制中有三种职能作用:测量、比较和执 行,而在自动控制系统中也必须有这三种,如图 1-3所示。液位控制系统由以下五部分组成。
4. 自动控制理论
研究自动控制共同规律的技术科学。
• 经典控制理论:以传递函数(Transfer Function)为 基础,研究单输入单输出(Single Input Single Output System)、线性定常系统(Linear Time Invariant System)的分析和设计问题。
8.反馈通路 (Feedback Channel):从被控量到比较 点的通道。
9.误差(Error):期望输出值与实际输出值之间的偏 差。
6. 自动控制系统的基本控制方式 开环控制
¾ 按给定值的开环控制 ¾ 按扰动补偿的开环控制
按偏差调节的反馈控制 复合控制
I 按给定值的开环控制
图1-6 按给定值的开环控制框图
自动控制理论A
天津大学电气与自动化工程学院 2013 秋季学期
课程信息
• 评分标准: 平时成绩20%+期末考试80% • 任课教师:鲜斌 • 电子邮件:xbin@ • 办公室:第26教学楼E525 • 答疑时间:周一下午3:55-5:00
• 教材
1.《自动控制原理》,胡寿松,第5版,2007
1-1 自动控制的基本原理与方式
1. 自动控制 (Automatic Control)
在没有人直接参与的情况下,利用外加的设备或 装置(称控制装置或控制器),使机器、设备或 生产过程(被控对象)的某个工作状态或参数 (即被控量)自动地按照预定的规律运行
2. 自动控制系统 (Automatic Control System)
例: 炉温控制系统 问题: 如果周围温度发生变化,能否回到设定的温度?
特点: 控制装置只按给定值来控制受控对象
优点: 控制系统结构简单,相对来说成本低。
缺点: 对可能出现的被控量偏离给定值的偏差 没有任何修正能力,抗干扰能力差,控 制精度不高。
II 按扰动补偿的开环控制
利用扰动信号产生控制作用,以及时补偿干扰对被控量的 直接影响。
2. 控制装置(Control Device):指对被控对象起控 制作用的设备总体。包含测量变换部件、放大部 件和执行装置。
3. 被控量(Controlled Variable):指被控对象中 要求保持给定值、要按给定规律变化的物理量。 被控量又称输出量、输出信号 。
4. 给定值 (Reference Value):是作用于自动控制 系统的输入端并作为控制依据的物理量。给定值 又称输入信号、输入指令、参考输入。
2. 《自动控制原理》 科学出版社,2010, 夏超英
参考书籍 1. 《自动控制原理》 清华大学出版社,
1990,吴麒等。 2. 《现代控制工程》 绪方胜彦
Modern Control Engineering K. Ogata 3. 《自动控制原理》,国防工业出版社,李
友
课程安排
• 第一章 自动控制的一般概念 • 第二章 控制系统的数学模型 • 第三章 线性系统的时域分析法 • 第四章 线性系统的根轨迹法 • 第五章 线性系统的频域分析法 • 第六章 线性系统的校正方法 • 第七章 线性离散系统分析与校正 • 第八章 非线性控制系统分析
恒值控制系统可看成输入等于常值的过程控制系统。
(III)
按传输信号 性质来分
连续系统 离散系统
1、连续系统 (Continuous System) 特点:系统各部分信号都是模拟的连续函数。目前工
业中普遍采用的常规仪表PID调节器控制的系统。
2、离散系统(Discrete System) 特点:系统的某一处或几处信号以脉冲序列或数码形
1-4 对自动控制系统的要求
1. 基本要求 稳定性
保证控制系统正常工作的先决条件,被控量偏离期望值 的初始偏差应随时间的增长逐渐减小,并趋于零。 快速性 对受控系统的过渡过程形式和快慢的要求,也称为动态 性能。 准确性 理想情况下,在过渡过程结束后,被控量的稳态值应与 期望值一致,但一般都存在稳态误差。
¾ 被控对象-----水池 ¾ 测量元件-----浮子 ¾ 比较机构-----电位器/电桥 ¾ 放大机构-----功率放大器 ¾ 执行元件-----拖动电机
• 控制工程中一般用方框图表示系统的各个组件, 组件的基本组成单元如图1-4所示,其中图a)为 引出点,图 b)为比较点,图 c)部件的框图。
是指能够对被控对象的工作状态进行自动控制的 系统,它由被控对象和控制装置组成。
3. 自动控制的发展历程
• 18世纪,James Watt 为控制蒸汽机速度设计的离 心调节器,是自动控制领域的第一项重大成果。
• 1922年,Minorsky研制出船舶操纵自动控制器, 并证明了从系统的微分方程确定系统的稳定性的 方法。
课程基本要求
总体安排: 16周授课时间,64学时,4学分
课程定位:自动化专业核心专业基础理论课
课程要求:掌握经典控制理论的基本理论方 法,并能够对工程控制系统进行 分析、设计和校正
课程特点
• 工程应用类课程 • 理论与实际相结合 • 原理与经验相结合
与其他课程的联系
第一章 自动控制系统的一般概念
r(t
)
=
⎧0, ⎨⎩∞,
t≠0 t=0
+∞
∫ r(t)dt =A −∞
④ 加速度函数 (acceleration function)
r
(t
)
=
⎧⎪ ⎨
1 2
Rt
2
,
t≥0
⎪⎩0, t < 0
④ 正弦函数 (sinusoidal function)
r(t
)
=
⎧ Asin(ωt
⎨⎩0, t <
− 0
故液位自动控制系统也可用图1-5来表示:
图1-5 自动控制系统方框图
主要组成部分: ¾ 测量元件:用以测量被控量或干扰量。 ¾ 比较元件:将被控量与给定值进行比较。 ¾ 执行元件:根据比较后的偏差,产生执行作用,去操
纵被控对象
参与控制的信号来自三条通道,即给定值、干扰量、被控 量。
一些基本概念
1. 被控对象(Plants) :要求实现自动控制的机 器、设备或生产过程。被控对象是控制系统的主 体,例如火箭、锅炉、机器人等。
blocket) 4. 神经网络工具箱 (neural network toolbox) 5. 模糊逻辑工具箱 (fuzzy logic toolbox) 6. 系统辨识工具箱 (system identification toolbox)
“稳、快、准”
动态性能、稳态性能
稳定性示意图
快速性示意图
准确性示意图
性能指标综合评价
2. 典型外作用(典型输入信号)
① 阶越函数 (step function)
r
(t)
=
⎧0, ⎨⎩R,
t<0 t≥0
② 斜坡函数 (ramp function)
r(t
)
=
⎧0,
⎨ ⎩
Rt,