【CN110070492A】一种基于OpenCV的高拍仪拍摄文档物体纠偏方法【专利】
【CN110120009A】基于显著物体检测和深度估计算法的背景虚化实现方法【专利】
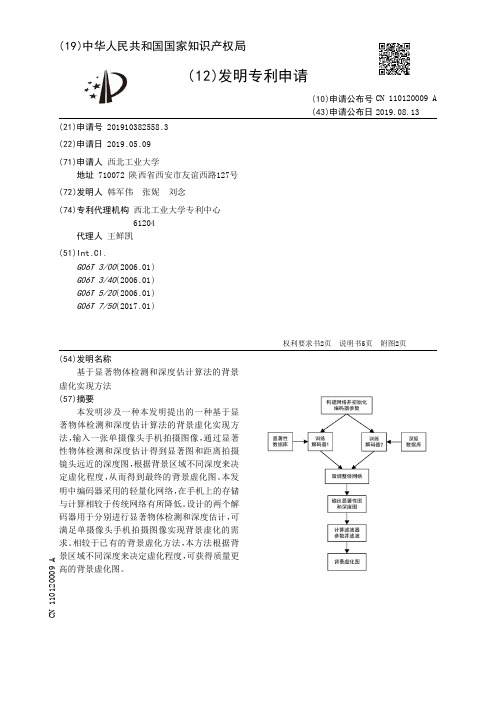
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 201910382558.3(22)申请日 2019.05.09(71)申请人 西北工业大学地址 710072 陕西省西安市友谊西路127号(72)发明人 韩军伟 张妮 刘念 (74)专利代理机构 西北工业大学专利中心61204代理人 王鲜凯(51)Int.Cl.G06T 3/00(2006.01)G06T 3/40(2006.01)G06T 5/20(2006.01)G06T 7/50(2017.01)(54)发明名称基于显著物体检测和深度估计算法的背景虚化实现方法(57)摘要本发明涉及一种本发明提出的一种基于显著物体检测和深度估计算法的背景虚化实现方法,输入一张单摄像头手机拍摄图像,通过显著性物体检测和深度估计得到显著图和距离拍摄镜头远近的深度图,根据背景区域不同深度来决定虚化程度,从而得到最终的背景虚化图。
本发明中编码器采用的轻量化网络,在手机上的存储与计算相较于传统网络有所降低。
设计的两个解码器用于分别进行显著物体检测和深度估计,可满足单摄像头手机拍摄图像实现背景虚化的需求。
相较于已有的背景虚化方法,本方法根据背景区域不同深度来决定虚化程度,可获得质量更高的背景虚化图。
权利要求书2页 说明书5页 附图2页CN 110120009 A 2019.08.13C N 110120009A1.一种基于显著物体检测和深度估计算法的背景虚化实现方法,其特征在于步骤如下:步骤1、构建深度神经网络结构并初始化参数:采用带跨越连接的编码器解码器的网络结构来同时进行显著物体检测和深度估计,得到神经网络参数;所述网络结构包含一个编码器和两个解码器,编码器采用MobileNetV2轻量化网络结构提供预训练模型来初始化编码器参数;两个解码器U-Net网络结构步骤2、构建训练数据集:利用DUTS-TR数据集来构建显著物体检测训练数据,利用NYU-Depth、ReDWeb和DIW数据集来构建深度估计训练数据;步骤3:利用步骤2所构建的训练数据集在Tensorflow平台上对步骤1所构建的神经网络参数进行训练,微调参数后得到训练完备的网络模型:步骤3a、固定编码器参数,单独训练其中一个解码器:利用步骤2中构建的显著物体检测训练数据训练其中一个解码器,训练的条件是设置网络的损失函数为交叉熵损失函数,设置优化算法为随机梯度下降算法,得到训练好的第一解码器;步骤3b、固定编码器参数,单独训练另一个解码器:利用步骤2中构建的深度估计训练数据中的NYU-Depth来单独训练另一个解码器,训练的条件是设置网络的损失函数为欧氏距离损失函数,设置优化算法为随机梯度下降算法;再利用步骤2中构建的深度估计训练数据中的ReDWeb来微调这个解码器,训练的条件是设置网络的损失函数为优化排序损失函数,设置优化算法为随机梯度下降算法;最后利用步骤2中构建的深度估计训练数据中的DIW继续微调这个解码器,训练的条件是设置网络的损失函数为排序损失函数,设置优化算法为随机梯度下降算法,得到训练好的第二解码器;步骤3c、使用步骤2中构建的显著物体检测训练数据DUTS-TR和步骤2中构建的深度估计训练数据中的DIW数据集交替微调编码器、步骤a训练好的第一解码器和步骤b训练好的第二解码器;过程中:每一步先使用一个批次的DUTS-TR数据在交叉熵损失函数下更新一次编码器和第一解码器,然后使用一个批次的DIW数据在排序损失函数下更新一次编码器和第二解码器,最终得到训练完备的网络模型;步骤4、使用步骤3训练完备的网络模型结果进行背景虚化:步骤4a:将图像I缩放至网络输入大小后,然后将其输入步骤3训练完备的网络模型:缩放至网络输入大小的图像I经过编码器和第一解码器得到一副显著图m,缩放至网络输入大小的图像I经过编码器和第二解码器得到一副深度图d;使用阈值t对显著图m进行二值化操作,即对于显著图m上的每个像素点,大于阈值的置为255,小于阈值的置为0,从而得到二值图s;步骤4b:利用二值图和深度图得到显著物体所有像素点的深度值,然后将所有属于显著物体的像素点的深度值除以所有显著物体的像素点总个数得到显著物体的平均深度z s,即使用公式计算,其中,s和z分别为步骤a得到的二值图和深度图;i表示像素点的索引;步骤4c:对每一个属于背景区域的像素点,减去步骤4b中得到的显著物体的平均深度值,再对其求绝对值得到该像素点的绝对深度差。
【CN110009079A】一种基于二维码的标签识别方法及设备【专利】
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 201910306956.7(22)申请日 2019.04.17(71)申请人 尤尼泰克(嘉兴)信息技术有限公司地址 314515 浙江省嘉兴市桐乡市高桥街道高桥大道1156号桐乡科技创业园3号楼1604号(72)发明人 李送送 刘少磊 沈怡 罗年庆 祝哲海 (74)专利代理机构 北京中知法苑知识产权代理事务所(普通合伙) 11226代理人 李明(51)Int.Cl.G06K 17/00(2006.01)G06K 19/06(2006.01)(54)发明名称一种基于二维码的标签识别方法及设备(57)摘要本发明涉及数据识别领域,特别是二维码技术。
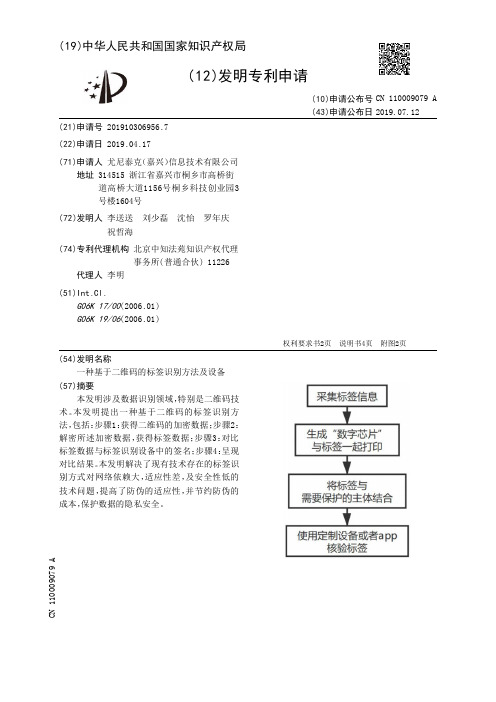
本发明提出一种基于二维码的标签识别方法,包括:步骤1:获得二维码的加密数据;步骤2:解密所述加密数据,获得标签数据;步骤3:对比标签数据与标签识别设备中的签名;步骤4:呈现对比结果。
本发明解决了现有技术存在的标签识别方式对网络依赖大,适应性差,及安全性低的技术问题,提高了防伪的适应性,并节约防伪的成本,保护数据的隐私安全。
权利要求书2页 说明书4页 附图2页CN 110009079 A 2019.07.12C N 110009079A权 利 要 求 书1/2页CN 110009079 A1.一种基于二维码的标签识别方法,其特征在于,包括:步骤1:获得二维码的加密数据;步骤2:解密所述加密数据,获得标签数据;步骤3:对比标签数据与标签识别设备中的签名;步骤4:呈现标签数据及异常数据。
2.一种如权利要求1所述基于二维码的标签识别方法,其特征在于,还包括二维码准备过程,所述准备过程包括:准备步骤1:采集标签信息;准备步骤2:将所述采集的标签信息编码为二进制数据,存储至二维码;准备步骤3:将所述二维码与标签整合。
3.一种如权利要求1所述基于二维码的标签识别方法,其特征在于,所述步骤2为:离线使用对称秘钥,和/或,非对称秘钥解密数据。
【CN109982072A】一种摄像头模组校准用光源对正方法【专利】
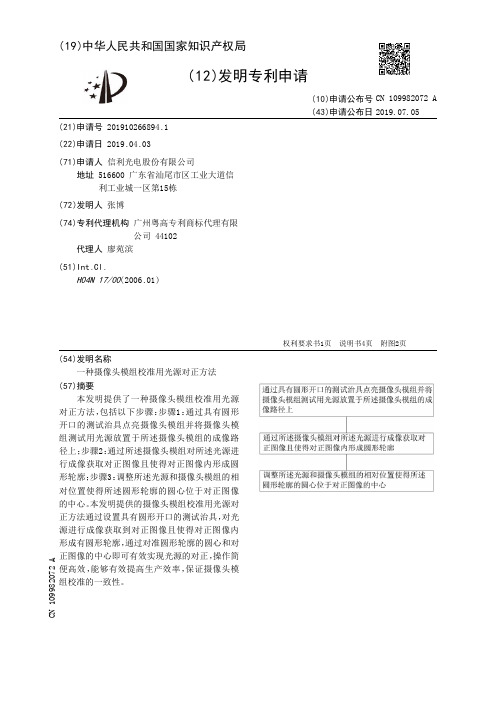
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 201910266894.1(22)申请日 2019.04.03(71)申请人 信利光电股份有限公司地址 516600 广东省汕尾市区工业大道信利工业城一区第15栋(72)发明人 张博 (74)专利代理机构 广州粤高专利商标代理有限公司 44102代理人 廖苑滨(51)Int.Cl.H04N 17/00(2006.01)(54)发明名称一种摄像头模组校准用光源对正方法(57)摘要本发明提供了一种摄像头模组校准用光源对正方法,包括以下步骤:步骤1:通过具有圆形开口的测试治具点亮摄像头模组并将摄像头模组测试用光源放置于所述摄像头模组的成像路径上;步骤2:通过所述摄像头模组对所述光源进行成像获取对正图像且使得对正图像内形成圆形轮廓;步骤3:调整所述光源和摄像头模组的相对位置使得所述圆形轮廓的圆心位于对正图像的中心。
本发明提供的摄像头模组校准用光源对正方法通过设置具有圆形开口的测试治具,对光源进行成像获取到对正图像且使得对正图像内形成有圆形轮廓,通过对准圆形轮廓的圆心和对正图像的中心即可有效实现光源的对正,操作简便高效,能够有效提高生产效率,保证摄像头模组校准的一致性。
权利要求书1页 说明书4页 附图2页CN 109982072 A 2019.07.05C N 109982072A权 利 要 求 书1/1页CN 109982072 A1.一种摄像头模组校准用光源对正方法,其特征在于,包括以下步骤:步骤1:通过具有圆形开口的测试治具点亮摄像头模组并将摄像头模组测试用光源放置于所述摄像头模组的成像路径上;步骤2:通过所述摄像头模组对所述光源进行成像获取对正图像且使得对正图像内形成圆形轮廓;步骤3:调整所述光源和摄像头模组的相对位置使得所述圆形轮廓的圆心位于对正图像的中心。
2.根据权利要求1所述的摄像头模组校准用光源对正方法,其特征在于,所述步骤2包括:通过所述摄像头模组对所述光源进行成像获取对正图像;调节所述光源至所述摄像头模组的距离至所述对正图像内形成圆形轮廓。
【CN110110760A】一种基于机器视觉的工件定位与识别方法【专利】
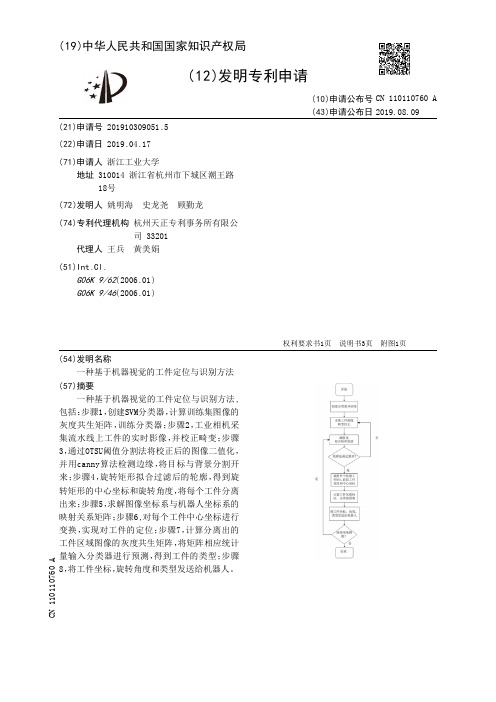
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 201910309051.5(22)申请日 2019.04.17(71)申请人 浙江工业大学地址 310014 浙江省杭州市下城区潮王路18号(72)发明人 姚明海 史龙尧 顾勤龙 (74)专利代理机构 杭州天正专利事务所有限公司 33201代理人 王兵 黄美娟(51)Int.Cl.G06K 9/62(2006.01)G06K 9/46(2006.01)(54)发明名称一种基于机器视觉的工件定位与识别方法(57)摘要一种基于机器视觉的工件定位与识别方法,包括:步骤1,创建SVM分类器,计算训练集图像的灰度共生矩阵,训练分类器;步骤2,工业相机采集流水线上工件的实时影像,并校正畸变;步骤3,通过OTSU阈值分割法将校正后的图像二值化,并用canny算法检测边缘,将目标与背景分割开来;步骤4,旋转矩形拟合过滤后的轮廓,得到旋转矩形的中心坐标和旋转角度,将每个工件分离出来;步骤5,求解图像坐标系与机器人坐标系的映射关系矩阵;步骤6,对每个工件中心坐标进行变换,实现对工件的定位;步骤7,计算分离出的工件区域图像的灰度共生矩阵,将矩阵相应统计量输入分类器进行预测,得到工件的类型;步骤8,将工件坐标,旋转角度和类型发送给机器人。
权利要求书1页 说明书3页 附图1页CN 110110760 A 2019.08.09C N 110110760A1.一种基于机器视觉的工件的定位与识别方法,步骤如下:步骤一,创建SVM分类器,计算训练集图像的灰度共生矩阵,将灰度共生矩阵的熵,相关性,均匀性,对比度作为分类器的输入,训练分类器;步骤二,采集流水线工件图片,采用张正友标定法对工业相机进行标定,校正拍摄图片畸变;步骤三,通过OTSU阈值分割法将校正后的图像二值化,并用canny算法检测边缘,将目标与背景分割开来;OTSU计算公式为:为第一类像素方差,w 1(t)为第一类像素权重,由该类像素的数量决定,为第二类像素方差,w 2(t)为第二类像素权重,OTSU算法思想是找到一个阈值T,使两类方差的加权和最小;步骤四,查找边缘图像的轮廓,将不是工件的轮廓去除,并将每个工件的分离出来,具体做法如下:4.1用旋转矩形去拟合每个轮廓,设置过滤条件,判断旋转矩形的长和高是否在工件指定范围内,如果标志位为假,则丢弃该轮廓,标志位的判断公式为:4.2用旋转矩形去拟合步骤4.1中已经过滤后的轮廓,得到矩形中心坐标和旋转角度,用外接矩形作为原图的ROI提取每个工件所在的区域;步骤五,求解图像坐标系与机器人坐标系的映射关系矩阵,具体过程如下:5.1图像坐标系与机器人坐标系映射矩阵为:(X r ,Y r )为机器人坐标,(X i ,Y i )为图像坐标系,(t x ,t y )为坐两标系相对平移向量,θ为两坐标系相对旋转角度,a为X轴缩放系数,b为Y轴缩放系数;5.2在图像坐标中随机设置多处采样点,求得采样点在图像坐标系中的坐标集合U1,机器人末端执行器示教图像中的采样点,得到机器人坐标集合U2;5.3将图像坐标集U1和对应的机器人坐标集U2代入步骤5.1关系式中,求得映射矩阵未知参数,为消除测量误差,对多次求取结果取平均值,可解得映射矩阵;步骤六,对旋转矩形中心坐标(X c ,Y c ),即每个工件中心坐标进行变换,变换矩阵为步骤5.1中求出的映射矩阵,求得工件中心在机器人坐标系的坐标(X r ,Y r ),实现对工件的定位;步骤七,计算分离出的工件区域图像的灰度共生矩阵,将矩阵相应统计量输入分类器进行预测,得到工件的类型;步骤八,将工件坐标,旋转角度和类型发送给机器人。
【CN110070500A】一种深度图像的后处理方法【专利】
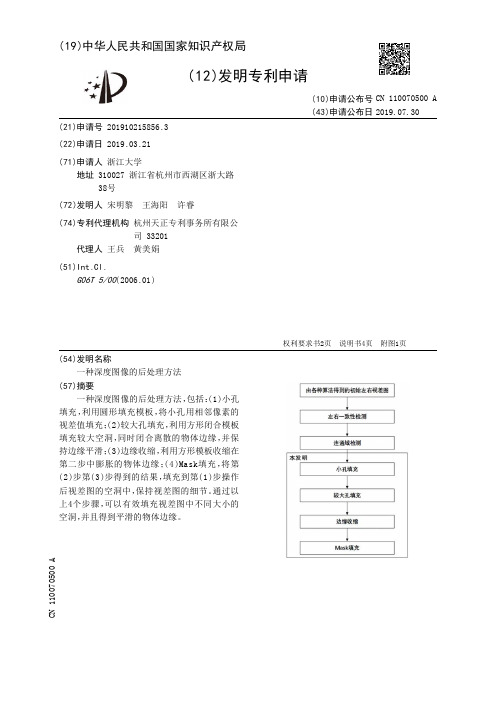
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 201910215856.3(22)申请日 2019.03.21(71)申请人 浙江大学地址 310027 浙江省杭州市西湖区浙大路38号(72)发明人 宋明黎 王海阳 许睿 (74)专利代理机构 杭州天正专利事务所有限公司 33201代理人 王兵 黄美娟(51)Int.Cl.G06T 5/00(2006.01)(54)发明名称一种深度图像的后处理方法(57)摘要一种深度图像的后处理方法,包括:(1)小孔填充,利用圆形填充模板,将小孔用相邻像素的视差值填充;(2)较大孔填充,利用方形闭合模板填充较大空洞,同时闭合离散的物体边缘,并保持边缘平滑;(3)边缘收缩,利用方形模板收缩在第二步中膨胀的物体边缘;(4)Mask填充,将第(2)步第(3)步得到的结果,填充到第(1)步操作后视差图的空洞中,保持视差图的细节。
通过以上4个步骤,可以有效填充视差图中不同大小的空洞,并且得到平滑的物体边缘。
权利要求书2页 说明书4页 附图1页CN 110070500 A 2019.07.30C N 110070500A1.一种深度图像的后处理方法,包括下列步骤:1)小孔填充;针对视差图Disp中稀疏的小孔,设计一个5*5的圆形填充模板C,用该模板遍历Disp中的每一个像素,得到圆形填充模板C所覆盖像素的视差最大值,将其作为当前像素的视差值Disp(x ,y);该圆形填充模板C可以将视差图中的小孔用相邻像素的视差值很好地填充,解决了视差图中的小孔问题;圆形填充模板C的填充公式如下,其中Disp表示视差图,(x ,y)表示视差图中各个像素的坐标,x和y分别代表水平坐标和垂直坐标,Disp(x ,y)表示视差图中像素的视差值,(i ,j)属于填充模板C,Disp(x+i ,y+j)表示圆形填充模板C覆盖的各个像素的视差值,max操作表示求圆形填充模板C所覆盖Disp中像素的视差最大值;2)较大孔填充;经过小孔填充后,视差图中仍然存在一些较大的空洞,同时物体边缘粗糙不平滑;设计一个15*15的方形闭合模板S,该模板既可以填充较大尺寸的空洞,又可以将物体边缘闭合,并且得到比较平滑的边缘;需要先将视差图Disp复制得到副本DispCopy,接下来的操作将在DispCopy上进行;将方形闭合模板S依次遍历DispCopy中的每一个像素,得到闭合模板S 所覆盖像素的视差最大值,将其作为当前像素的视差值DispCopy(x ,y);较大孔填充的公式如下,其中DispCopy表示视差图副本,(x ,y)表示DispCopy中的各个像素坐标,x和y分别代表水平坐标和垂直坐标,DispCopy(x ,y)表示视差图副本中像素的视差值,(i ,j)属于方形闭合模板S,DispCopy(x+i ,y+j)表示方形闭合模板S覆盖的各个像素的视差值,max操作表示求方形闭合模板S所覆盖DispCopy中像素的视差最大值;3)边缘收缩;经过以上操作,DispCopy中空洞基本消失,物体边缘也比较平滑,但存在物体边缘膨胀的现象,需要将边缘收缩;利用上一步骤中使用的15*15的方形模板S,做边缘收缩操作;将方形模板S遍历DispCopy中的每一个像素,得到模板S所覆盖像素的视差最小值,将其作为当前像素的视差值DispCopy(x ,y);该操作可以收缩物体膨胀的边缘,同时保持边缘的平滑;边缘收缩的表示公式如下,其中DispCopy(x ,y)、DispCopy(x+i ,y+j)表示的意义和第二步中一样,(i ,j)属于方形模板S,min操作表示求方形模板S所覆盖DispCopy中像素的视差最小值;4)Mask填充;最后,针对视差图Disp中无视差值的像素,使用副本DispCopy对应位置的视差值填充;不将DispCopy作为最终视差图,是因为过程中使用较大尺寸的方形模板S对副本DispCopy 求最值并赋值,该操作使副本视差图DispCopy呈现块状化,损失较多细节;Mask填充的公式如下,Disp(x ,y)表示视差图中的像素视差值,DispCopy(x ,y)表示视差图副本中的像素视差值,当Disp(x ,y)不等于0,即视差图中像素视差有效时,取值不变,当Disp(x ,y)等于0,即视差图中像素无有效视差时,则将视差图副本中对应的像素视差值DispCopy(x ,y)赋值给权 利 要 求 书1/2页2CN 110070500 A。
【CN110046530A】一种基于多任务目标检测的条形码倾斜矫正方法【专利】
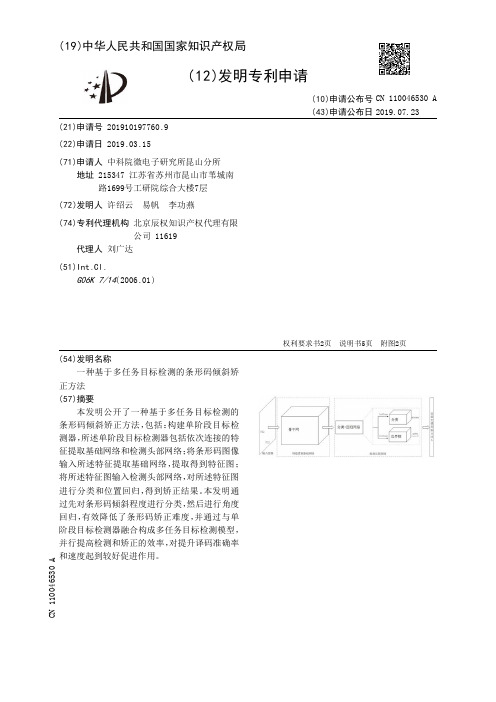
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 201910197760.9(22)申请日 2019.03.15(71)申请人 中科院微电子研究所昆山分所地址 215347 江苏省苏州市昆山市苇城南路1699号工研院综合大楼7层(72)发明人 许绍云 易帆 李功燕 (74)专利代理机构 北京辰权知识产权代理有限公司 11619代理人 刘广达(51)Int.Cl.G06K 7/14(2006.01)(54)发明名称一种基于多任务目标检测的条形码倾斜矫正方法(57)摘要本发明公开了一种基于多任务目标检测的条形码倾斜矫正方法,包括:构建单阶段目标检测器,所述单阶段目标检测器包括依次连接的特征提取基础网络和检测头部网络;将条形码图像输入所述特征提取基础网络,提取得到特征图;将所述特征图输入检测头部网络,对所述特征图进行分类和位置回归,得到矫正结果。
本发明通过先对条形码倾斜程度进行分类,然后进行角度回归,有效降低了条形码矫正难度,并通过与单阶段目标检测器融合构成多任务目标检测模型,并行提高检测和矫正的效率,对提升译码准确率和速度起到较好促进作用。
权利要求书2页 说明书5页 附图2页CN 110046530 A 2019.07.23C N 110046530A1.一种基于多任务目标检测的条形码倾斜矫正方法,其特征在于,包括:构建单阶段目标检测器,所述单阶段目标检测器包括依次连接的特征提取基础网络和检测头部网络;将条形码图像输入所述特征提取基础网络,提取得到特征图;将所述特征图输入检测头部网络,对所述特征图进行分类和位置回归,得到矫正结果。
2.根据权利要求1所述的一种基于多任务目标检测的条形码倾斜矫正方法,其特征在于,所述特征提取基础网络用于特征提取,输出所述条形码图像不同大小、不同抽象层次的语义特征信息表示;所述检测头部网络根据所述语义特征信息表示和监督信息完成待检测目标的分类和定位。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(19)中华人民共和国国家知识产权局
(12)发明专利申请
(10)申请公布号 (43)申请公布日 (21)申请号 201910239468.9
(22)申请日 2019.03.27
(71)申请人 广东建设职业技术学院
地址 510440 广东省广州市白云区广花二
路638号
(72)发明人 王咸锋
(74)专利代理机构 广州科粤专利商标代理有限
公司 44001
代理人 周友元 黄培智
(51)Int.Cl.
G06T 3/60(2006.01)
G06T 5/00(2006.01)
G06T 7/11(2017.01)
G06T 7/13(2017.01)
G06T 7/136(2017.01)
(54)发明名称
一种基于OpenCV的高拍仪拍摄文档物体纠
偏方法
(57)摘要
本发明公开了一种基于OpenCV的高拍仪拍
摄文档物体纠偏方法,包括以下步骤:先从高拍
仪摄像头中实时获取图像;然后利用cvSmooth函
数对图像去噪点;之后将去噪点的图像利用
cvThreshold函数对图像进行二值化;最后利用
Hough变换找到直线。
本发明的纠偏方法,基于
OpenCV,大大提升了开发效率,且图像算法稳定
可靠,能有效将图像内需要纠偏的部分截出,最
终通过计算出其偏移角度,并对其进行旋转偏
移,将图像中需要截出的部分正视展示出来,不
仅可实时显示拍摄的内容,纠偏结果可视化,而
且令使用者知道将要扫描的文档是否可以正常
完成纠偏操作,告知使用者要纠偏哪些内容,将
高拍仪可视化的优点提到一个新的高度,同时给
使用者一种新的使用体验。
权利要求书1页 说明书4页 附图3页CN 110070492 A 2019.07.30
C N 110070492
A
权 利 要 求 书1/1页CN 110070492 A
1.一种基于OpenCV的高拍仪拍摄文档物体纠偏方法,其特征在于,所述方法包括以下步骤:
S1:从高拍仪摄像头中实时获取图像;
S2:利用cvSmooth函数对图像去噪点;
S3:将去噪点的图像利用cvThreshold函数对图像进行二值化;
S4:利用Hough变换找到直线。
2.根据权利要求1所述的基于OpenCV的高拍仪拍摄文档物体纠偏方法,其特征在于:所述cvThreshold函数的算法具体如下:利用迭代法设定一个阈值T,将大于T的像素群的像素点的灰度值设置为255;小于T的像素群的像素点的灰度值设置为0。
3.根据权利要求2所述的基于OpenCV的高拍仪拍摄文档物体纠偏方法,其特征在于:所述迭代法具体如下:预置一个阈值T,对图像中灰度值>T的像素点求出灰度平均值T1,图像中灰度值<T的像素点求出灰度平均值T2,若丨T1-T2丨<△则当前T即为最佳阈值,否则T=(T1 +T2)/2,并循环上述比较操作,其中△取值为0.1。
4.根据权利要求1所述的基于OpenCV的高拍仪拍摄文档物体纠偏方法,其特征在于:所述Hough变换步骤如下:先将二值化后的图像利用cvCanny函数寻找输入图像的边缘,并利用cvHoughLines2函数判断出其边缘是否为直线,然后算出所有直线与水平直线所形成的角度,保存在数组当中,数组大小为180个元素,最后对数组循环180次,找出数组中出现值相等最多的值即为旋转的角度。
5.根据权利要求4所述的基于OpenCV的高拍仪拍摄文档物体纠偏方法,其特征在于:所述cvCanny函数的算法具体如下:首先用高斯滤波器平滑图像,然后用一阶偏导的有限差分计算梯度的幅值和方向,再对梯度幅值进行非极大值抑制,最后用双阀值算法检测和连接边缘。
2。