截止阀的三维造型与虚拟装配
基于SolidWorks的电磁截止阀虚拟设计及动态仿真
大 大 提 高 设 计 速度 , 短研 发 周 期 , 缩 降低 设 计 错 误 , 减 少 设 计 成本 。零 部 件设 计 是借 助 于三 维 软件 实现 零件
的实 体建 模 , 直 观反 映零 件 的 内部 结构 和外 观 形状 ; 能 零 部 件 的虚 拟装 配 是借 助 于 三维 软件 在 虚拟 环境 下 对
中 图分 类 号 : H1 75 T 3. 文献 标 识 码 : A 文 章 编 号 :0 8 0 1 ( 0 2 0 — 0 8 0 10 — 8 32 1 )4 0 0 — 3
Vit a Dei n n Dy a i Sm u ai n f ru l sg a d n m c i lto o
零 部 件 的组 合 ,可 以在设 计 阶段 验证 零 部件 之 间 的配
球 面座 阀芯 5是 实 现油路 通 断 的关 键部 件 。它 的作 用 是用 于切 断油 口侧 , 电 磁铁 的推杆 直接 作用 于 阀芯 。当电磁铁 1断电时 , 弹簧
9将 阀芯 5压 在左 阀座 6上 , 断 A 口与 T口的通 路 , 切 而使 A 口与 P口相 通 ; 当电磁铁 1 电时 , 通 电磁铁 的推
Ke wo d : d r c in l c n rl h t of v l e d r ci n l c n r l al av ; d n mi smu ain; v r a a s mb y S l W o k y rs i t a- o t s u - f av ; i t a— o to b l e o o e o v le y a c i lt o it l se l ; oi u d rs
机械CADCAM-参数化设计-截止阀
机械CAD/CAMParametric Drawing Report参数化绘图姓名:班级序号:学号:专业:机械设计制造及其自动化指导老师:文国军Introduction of object to be drawn:本次参数化绘图所要绘制的是截止阀的阀体,二维图和三维图分别如图1、图2所示。
图1 阀体的二维图图2 阀体的三维模型图Program codes:bolt:dialog{label="截止阀";:row{:column{:edit_box{label="阀孔直径d(60-80):";key="d";edit_limit=5;edit_width=5;fixed_width=true;}}:image_button{key="fa_image";color=3;width=20;fixed_width=true;height=8;}}ok_cancel;}(defun C:FA ()(setq filename "FA")(if (> (setq index_value (load_dialog filename)) 0) (progn(setq do_what 8)(while (> do_what 1)(if (new_dialog filename index_value)(progn(start_image "fa_image")(setq max_x (dimx_tile "fa_image"))(setq max_y (dimy_tile "fa_image"))(slide_image 0 0 max_x max_y "bolt")(end_image) ;关闭图像按钮(action_tile "d" "(setq d (atof $value))")(setq do_what (start_dialog)))(alert "不能显示对话框!")))(unload_dialog index_value))(alert "不能加载对话框!"))(if (= do_what 1)(draw_a d)))(defun a (d);找点(setq p0 (getpoint "\n 输入基点:"))(setq p1 (polar p0 pi 57))(setq p2 (polar p0 pi 73))(setq p3 (polar p2 (* pi 1.5) 17))(setq p4 (polar p3 (* pi 1.75) (* 1.414 3))) (setq p5 (polar p4 0 10))(setq p6 (polar P5 (* pi 1.5) 4.5))(setq p7 (polar p6 pi 30))(setq p8 (polar p7 2.356 (* 1.414 5)))(setq p9 (polar p8 1.571 21))(setq p10 (polar p9 2.356 (* 1.414 5)))(setq p11 (polar p10 pi 15))(setq p12 (polar p11 (* pi 1.5) 25.5))(setq p13 (polar p12 pi 4))(setq p14 (polar p13 (* pi 1.5) (+ 114 (- d 76)))) (setq p15 (polar p14 0 4))(setq p16 (polar p15 (* pi 1.5) 25.5))(setq p17 (polar p16 0 15))(setq p18 (polar p17 0.7854 (* 1.414 5))) (setq p19 (polar p18 1.57 21))(setq p20 (polar p19 (* pi 0.25) (* 1.414 5))) (setq p21 (polar p20 0 30))(setq p22 (polar p21 (* pi 1.5) 7.5))(setq p23 (polar p22 (* pi 1.75) (* 1.414 5))) (setq p24 (polar p23 0 25))(setq p25 (polar p24 (* pi 1.5) 4))(setq p26 (polar p25 (* pi 1.75) (* 1.414 3)))(setq p27 (polar P26 0 27))(setq p28 (polar p25 0 30))(setq p29 (polar P28 0 12))(setq p30 (polar p29 (* pi 1.5) 3)) (setq p31 (polar P3 0 73))(setq p32 (polar P5 0 60))(setq p33 (polar P22 0 60))(setq p34 (polar P4 0 5))(setq p35 (polar P6 pi 10))(setq p36 (polar p24 0 30))(setq p37 (polar P0 pi 65))(setq p38 (polar P37 (* pi 0.5) 3)) (setq p39 (polar p37 (* pi 1.5) 15)) (setq p40 (polar p1 0 114))(setq p41 (polar p40 (* pi 1.5) 12)) (setq p42 (polar p41 3.1416 7)) (setq p43 (polar p42 (* pi 1.5) 26)) (setq p44 (polar p43 0 69))(setq p45 (polar p44 (* pi 1.5) d)) (setq p46 (polar p45 3.1416 69)) (setq p47 (polar p46 (* pi 1.5) 12)) (setq p48 (polar p47 3.1416 9)) (setq p49 (polar p48 (* pi 1.5) 4)) (setq p50 (polar P49 3.1416 6)) (setq p51 (polar P48 3.1416 6)) (setq p52 (polar P51 3.1416 10)) (setq p53 (polar P52 (* pi 1.5) 6)) (setq p54 (polar P53 3.1416 25)) (setq p55 (polar P52 3.1416 25)) (setq p56 (polar P42 3.1416 50)) (setq p68 (polar P41 0 10))(setq p69 (polar P47 0 5))(setq p70 (polar p0 (* pi 1.5) d)) (setq p71 (polar p70 0 125)) (setq p72 (polar p70 3.1416 125)) (setq p73 (polar p70 1.57 80)) (setq p74 (polar p70 (* pi 1.5) 75 )) (setq p75 (polar p70 0 34))(setq p76 (polar p70 3.1416 34));圆心(setq CP1 (polar p70 0 300)) (setq CP2 (polar p70 (* pi 1.5) 200)) (setq CP3 (polar CP1 0.7854 70)) (setq CP4 (polar CP2 1.57 65))(setq P77 (polar CP1 0 88))(setq P78 (polar CP1 3.1416 88))(setq P79 (polar CP1 1.57 88))(setq P80 (polar CP1 (* pi 1.5) 88 ))(setq P81 (polar CP2 0 80))(setq P82 (polar CP2 3.1416 80))(setq P83 (polar CP2 1.57 80))(setq P84 (polar CP2 (* pi 1.5) 80))(setq p85 (polar CP3 3.927 6))(setq p86 (polar CP4 2.356 2))(setq P87 (polar CP3 0.7854 8))(setq P88 (polar CP3 3.9270 8))(setq p89 (polar CP4 1.57 4))(setq p90 (polar CP4 (* pi 1.5) 4))(setvar "osmode" 0) ;去除对象捕捉;图层1(command "layer" "m" 1 "c" 7 1 "L" "continuous" 1 "lw" 0.3 1 "")(command "pline" p0 p1 p2 p3 "A" p4 "L" p5 p6 p7 "A" p8 "L" p9 "A" p10 "L" p11 p12 p13 p14 p15 p16 p17 "A" p18 "L" p19 "A" p20 "L" p21 P22 "A" P23 "L" P24 P25 "A" P26 "L" P27 "");外轮廓多段线(setq pc1 (entlast));将多段线(command "line" p34 p35 "")(setq pc2 (entlast))(command "pline" p40 p41 p42 p43 p44 p45 p46 p47 p48 p49 p50 p51 p48 p52 p53 p54 "") (command "arc" p43 p75 p46);三点圆弧代替相贯线(command "arc" p21 "E" p6 "r" (+ 60 (- d 76)));圆弧(command "line" p52 p55 "")(command "line" p42 p56 "")(command "line" p3 p31 "")(command "line" p5 p32 "")(command "line" p7 p20 "")(command "line" p9 p18 "")(command "line" p10 p17 "")(command "line" p12 p15 "")(command "line" p22 p33 "")(command "line" p24 p36 "")(command "line" p42 p56 "")(command "pline" p28 p29 p30 "");画圆(command "circle" CP1 (/ d 2) )(command "circle" CP1 57 )(command "circle" CP1 82.5 )(command "circle" CP2 25 )(command "circle" CP2 35 )(command "circle" CP2 41 )(command "circle" CP2 50 )(command "circle" CP2 57 )(command "circle" CP2 73 )(command "circle" cp3 5.25 )(setq pz1 (entlast))(command "circle" cp4 1.65 )(setq px1 (entlast));图层3(command "layer" "m" 3 "c" 1 3 "L" "ACAD_ISO04W100" 3 "lw" 0.05 3 "")(command "line" p71 p72 "")(command "line" p74 p73 "")(command "line" p77 p78 "")(command "line" p79 p80 "")(command "line" p81 p82 "")(command "line" p83 p84 "")(command "line" p87 p88 "")(setq pz3 (entlast))(command "pline" p89 p90 "")(setq px3 (entlast))(command "line" p38 p39 "")(setq pc3 (entlast))(command "mirror" pc1 pc2 pc3 "" p73 p74 "n");镜像(command "circle" cp1 70 )(command "circle" cp2 65 ); 图层2(command "layer" "m" 2 "c" 7 2 "L" "continuous" 2 "lw" 0.05 2 "")(command "bhatch" "p" "ansi31" 2 0 p68 p69 "");填充(command "arc" p85 "C" cp3 "A" 270)(setq pz2 (entlast))(command "arc" p86 "C" cp4 "A" 270)(setq px2 (entlast))(command "array" pz1 pz2 pz3 "" "p" CP1 4 360 "Y");阵列(command "array" px1 px2 px3 "" "p" CP2 6 360 "Y"))Running results:在CAD绘图面中,点击【管理】,选择【加载应用程序】,加载所编写的程序,如图3所示,需要加载文件【fa】【a】。
截止阀的有限元分析和流场模拟开题报告
4.2019.4.11-----2019.4.17与阀瓣的装配体在稳定流动时的有限元建模与仿真。此过程应用到UG中的装配功能模块,注意装配的约束,几何约束等细节问题。
6.同样利用NX Nastran求解器,将阀瓣装配到阀体上,模拟闭合状态下时,阀体各个部分的应力应变情况。
7.选择NX Thermal/Flow求解器,分析类型改为流曲线,模拟截止阀在稳定流动时阀体内部的速度和压力分布情况。
8.认真记录模拟过程,分析DS/J型截止阀的流道结构,完成论文。
毕业设计(论文)工作计划安排:
截止阀的有限元分析和流场模拟开题报告
毕业设计(论文)题目
DS/J型截止阀的有限元分析和流场模拟
院(系、部)
指导老师
专业
班级
学生学号
学生姓名
目前国内外研究进展概述(或立题依据):
截止阀,也叫截门,是使用最广泛的一种阀门,它之所以广受欢迎,是由于开闭过程中密封面之间摩擦力小,比较耐用,开启高度不大,制造容易,维修方便,不仅适用于中低压,而且适用于高压。近年来,随着我国综合国力的增强,截止阀的发展也得到加快,很多企业相继开发出了自己的特色阀门产品,如上海大田阀门管道工程有限公司自己研制的夹套保温截止阀;上海,广州等地已成为我国截止阀研究生产基地。截止阀的生产过程中,需要根据用途先进行设计,对于设计出来的新产品,不能确定其是否达到要求。因此,可以利用一些仿真软件模拟阀门的应力应变和阀门内部的流场形态,直观的展现出来,降低了废品率,积极有效的提高了创新和生产效率。
基于CATIA的机械零件三维造型与虚拟装配
线 、面设 计 ,具有传 统二 维软件设 计 的功能 。
参 数化 设 计 的 基 本 方 法 是 从 草 图设 计 开 始 , 通过施 加 尺 寸 和几 何 约 束 生 成 草 图特 征 ,再 应 用
பைடு நூலகம்
业首选的设计软件。它以其 强大的曲面设计功能
在机 械 、飞机 、汽 车 、造 船 等 设 计 领 域 得 到 广 泛 应用 ,C TA 的 曲面 造 型 功 能 的特 点 和 优 势 体 现 AI 在它 提供 了极 丰 富 的造 型 工 具 来 支持 用 户 的造 型
C TA具 有 很 强 的三 维 实 体 建 模 的 功 能 , 当 AI
用户在 草 图平 面绘 制 二 维 图形 后 ,进 入 零 件 设 计
( at ein PrD s )模 块 ,可 以通 过 旋转 、拉 伸 、放样 、 g 加肋 、拔 模 等 方 法 生 成 所 需 的 三 维 零 件 毛 坯 。 同
UG环境下闸阀结构的虚拟设计
有利于提高闸阀产品的设计质量 , 有利 根据特征实体建模流程 ,对 闸阀的相关零部件 的开发工具 , 于提高企业对市场的快速反应 。 进行实体建模 , 零件的三维造型如图 3 所示 。
一 一
闸阀是流体管路 的控制装置 ,用来切断和接通 () 3 相关性。同一模型文件 , 各几何对象之间保 管路中介质 、 阻止管路 中介质倒流、 调节管路中介质 持完全相关 。 通过装配建模技术 , 可以实现不同模型
的压力 和流量 , 以及改变管路中介质的流动方 向等。 文件之间的关联性。通过主模型方法 , 可以实现集成 闸 阀 的应 用 非 常 普 遍 , 构 和 种 类 众 多 , 于材 料 、 系统 中模块之间的相关性。 结 由 工艺和设计水平的限制 ,我 国大多数闸阀设 计和制 ( ) 同性 和开 放性 。U 4协 G可 以通 过 网络 进行 异
略 , 于U 基 G集成环境 实现 了闸阀的虚拟设计和装 配。 高了闸阀结构设计的品质和效 率。 提
关键 词 : 虚拟设计 ; UG; 闸阀
中图分类号 : H1 2 丁 2
文献标识码 : B
文章编 号:6 2 5 5 ( o 2)4 0 5 - 2 17 — 4X 2 1 0— 10 o
机化 ,02 ( :6 4 . 2 0 , )4 - 8 2 图 4 闸阀的装 配图
[ 曾向阳 , 国明.G基 础及应用教程 【】 4 ] 谢 U M. : 北京 电子工业 出 [ 肖田元 , 5 ] 韩向利 , 王新龙. 虚拟制造 的定 义与关键 技术 叨. 清
10 5
《 装备制造技术) 02 2 1 年第 4 期
CADCAM应用 项目5 截止阀阀体工程图
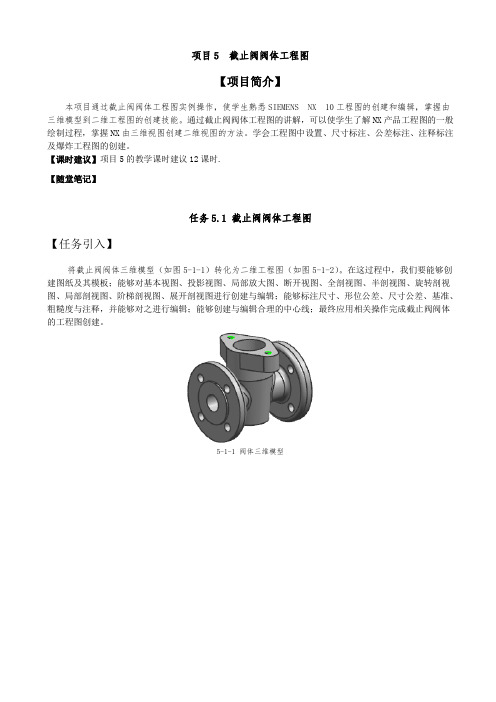
项目5 截止阀阀体工程图【项目简介】本项目通过截止阀阀体工程图实例操作,使学生熟悉SIEMENS NX 10工程图的创建和编辑,掌握由三维模型到二维工程图的创建技能。
通过截止阀阀体工程图的讲解,可以使学生了解NX产品工程图的一般绘制过程,掌握NX由三维视图创建二维视图的方法。
学会工程图中设置、尺寸标注、公差标注、注释标注及爆炸工程图的创建。
【课时建议】项目5的教学课时建议12课时.【随堂笔记】任务5.1 截止阀阀体工程图【任务引入】将截止阀阀体三维模型(如图5-1-1)转化为二维工程图(如图5-1-2)。
在这过程中,我们要能够创建图纸及其模板;能够对基本视图、投影视图、局部放大图、断开视图、全剖视图、半剖视图、旋转剖视图、局部剖视图、阶梯剖视图、展开剖视图进行创建与编辑;能够标注尺寸、形位公差、尺寸公差、基准、粗糙度与注释,并能够对之进行编辑;能够创建与编辑合理的中心线;最终应用相关操作完成截止阀阀体的工程图创建。
5-1-1 阀体三维模型5-1-2 阀体工程图【任务分析】由三维软件转化二维工程图是各种三维设计软件的基本功能。
因为图纸国标化的要求,在具体应用中,使用者往往会把三维设计模型仅仅转化成三视图,然后再转至熟悉的二维软件来完成尺寸、公差、粗糙度、技术要求的标注。
这样就会使实体模型尺寸的变更不能及时反应到工程图。
其根本的原因就是使用者对NX 软件的工程图相关设置不熟悉。
其实NX 10.0的工程图已有国标模板,如果个别方面不符合国标,也可进行相应设置,这样就能够产生符合中国标准的图纸。
【任务实施】Step1、NX 10.0工程图预设置1、启动NX 10.0,点击“新建”按钮,弹出“新建”对话框,设置单位为“毫米”,选择“模型”,点击“确定”按钮,进入建模模块。
2、点击主菜单→“文件”→“实用工具”→“用户默认设置”,弹出“用户默认设置”对话框。
3、点击“用户默认设置”→“制图”→“常规/设置”→“制图标准”,选择“GB”,如图5-1-3所示。
Z90型电动阀门装置及设计设计说明书【有CAD图】
毕业设计(论文)设计(论文)题目:Z90型电动阀门装置及数控加工工艺的设计摘要本毕业设计主要是设计Z90型电动阀门装置的主要零部件以及关键零部件的数控加工工艺。
Z90型电动阀门装置具有功能全、性能可靠、控制系统先进、体积小、重量轻、使用维护方便等特点。
广泛用于电力、冶金、石油、化工造纸、污水处理等部门。
用以控制阀门的开启、关闭和调节,可远距离控制,也可现场操作。
Z90型电动阀门装置广泛应用于电力、冶金、石油、化工、造纸、造船、消防、供水、环保等众多行业。
是阀门实行远程控制、集中控制和自动控制必不可少的驱动装置。
目录第一章课题简介 (1)1.1 Z90型电动阀门概述 (1)1.2 本文的设计思路 (1)第二章 Z90型电动阀门的结构及工作原理概述 (2)2.1 Z90型电动阀门的结构 (2)2.2 Z90型电动阀门的工作原理 (2)2.3 Z90型电动阀门装置的原始性能参数 (2)第三章 Z90型电动阀门装置主要零部件的设计 (3)3.1齿轮的设计 (3)3.1.1 选择齿轮材料及热处理方法 (3)3.1.2 计算齿轮的许用应力 (3)3.1.3 齿轮的几何尺寸计算 (3)3.1.4 齿轮弯曲疲劳强度的计算 (4)3.1.5 校核齿轮齿面接触疲劳强度 (5)3.1.6 齿轮的实际圆周速度 (6)3.1.7 计算啮合力 (6)3.1.8 电动机的选择 (6)3.2 轴的设计 (7)3.2.1 选用轴的材料和初步估算轴径 (7)3.2.2轴上受力分析 (7)3.2.3确定危险截面并计算安全系数 (7)3.3 轴承的寿命计算 (10)3.3.1计算内部轴向力S (11)3.3.2计算实际轴向力 (11)3.3.3取系数X、Y值 (11)3.3.4计算当量载荷P (11) (12)3.3.5计算轴承额定寿命Lh3.4 选用键并校核强度 (12)3.4.1输出轴上安装齿轮处选用键的内型 (12)3.4.2电机齿轮固定键的内型 (13)3.5 箱体的设计 (13)3.6 齿轮和轴的润滑油的选择 (13)3.7 工件压机构紧及夹具 (14)3.8 电器元件及控制机构 (15)第四章关键零部件的数控加工工艺设计 (18)4.1 概述 (18)4.1.1 数控加工工艺的概念 (19)4.1.2 数控加工工艺特点 (20)4.1.3 数控加工的工艺适应性 (20)4.1.4 数控加工零件的工艺性分析 (21)4.2 数控加工工艺 (22)4.2.1 零件图样工艺分析 (22)4.2.2 制定工艺过程 (23)4.2.3 选择刀具 (23)4.2.4 确定切削用量 (23)4.3 三维造型及CAM模拟加工 (23)第五章本文小结 (25)参考文献 (26)致谢 (27)第一章课题简介阀门电动装置是阀门的驱动装置,用以驱动和控制阀门的开启和关闭。
cad截止阀阀体三维设计

UG CAD
UG CAD
五、课堂小结
本次课学习阀体的建模,涉及的命令较多,图形相对来说也较复杂,学习的过 程中要注意以下几点:
1 正确的理解图形,这是建模的前提。通常是按形体分析法,把一复杂图 形分解成简单柱体,再进行叠加和切割。
2 要有正确的建模思路,运用已学的建模知识,把零件的几何特征进行 合理的排序。
• 单击格式 WCS 原点 • 选择凸台的边缘,圆弧中心 • 把坐标系移动到凸台中心
坐标系
3. 在Φ90圆柱表面创建一圆柱Φ10X12,并正确定位,其余三个孔利用圆周阵列 命令 完成
UG CAD
3.圆形阵列
执行特征操作工具条中“对特征形成图样” 命令,“阵列定义”布局为“圆形”按钮,选择 Ø10圆柱孔作为阵列特征,“阵列定义”对话框中输 入阵列参数:数字4,“节距角”为90°,通过矢量 构造器和点构造器定义“指定矢量”和“指定点” ,定义当前WCS的Z轴为旋转轴,Ø50圆心为“指定
UG CAD
图4-1-2特征分解 镜像特征
抽壳体 回转体
实体圆角
UG CAD
右视基准面
上视基准面 前视基准面 图4-1-3 阀体图纸
UG CAD
(一) 创建截面线
• 1.创建Ø52×33圆柱 完成图4-1-3所示的基本体素圆柱体,矢量方向“-ZC”,
底面圆心坐标为(0,0,0)。
图4-1-4 Ø52×33圆柱
3 学习三维建模,要仔细揣摩,勤于思考,多做练习。
六、教学评价
UG CAD
任务名称
造型类
姓名
考核点和配分
考核标准
造型思路正确、全面,具有一定的技巧(10-15分);造型思路基本 造型思路(15分) 正确、全面(6-9分);造型思路有错误(1-5分)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2双头螺栓
3.螺钉M3
4.密封垫片
5.阀体
6.圆柱销M4
7.总装配图
团队合作
充分调动了学生的积极性,锻炼了自主学习能力。
充分发挥学生的想象力,提高创新意识。进一步激发学 生的动手操作的能力。
根据所做的学期项目,在以前已有的基础上进行进一步 的改进。这样也便于我们自己充分理解,对项目的进一 步的研究,从而使学校组织的项目计划发挥到其作用的 最大化。使自我能力得到充分的施展与发挥。
BESTERS
团队口号
WE ARE ONE TEAM NEVER TO GO DOWN NEVER TO CRY TRY BEST TO FLY TO BE BESTERS
1.截止阀的简介
截止阀属于强制密封式阀门,所以在阀门 关闭时,必须向阀瓣施加压力,以强制密 封面不泄漏。当介质由阀瓣下方进入阀门 时,操作力所需要克服的阻力,是阀杆和 填料的摩擦力与由介质的压力所产生的推 力,关阀门的力比开阀门的力大,所以阀 杆的直径要大,否则会发生阀杆顶弯的故 障。近年来,从自密封的阀门出现后,截 止阀的介质流向就改由阀瓣上方进入阀腔, 这时在介质压力作用下,关阀门的力小, 而开阀门的力大,阀杆的直径可以相应地 减少。同时,在介质作用下,这种形式的 阀门也较严密。我国阀门“三化给”曾规 定,截止阀的流向,一律采用自上而下。 本阀要水平安装。
经过本次截止阀的选型与设计,本组各位成员收 获了许多心得。
首先,我们在测量尺寸方面遇到了许多不顺,但 我们利用所讲的测量技术相关知识(例如:最小区域 法,两点法)克服了测量上所遇的重重问题。
再次,我们一起探讨了有关UG方面的相关操作 方法,硬拔掉了上机绘图的荆棘。
最后,我们是一个永不言弃的团队,感谢每一个 为小组付出的成员,记住,我们是BESTERS.
截止阀的图片
2.截止阀的分类
a,根据截止阀的通道方向分为: 直通式截止阀,直流式截止阀,角式截止阀和柱塞
式截止阀 b,根据截止阀阀杆上的螺纹的位置分为:
上螺纹阀杆截止阀和下螺纹阀杆截止阀 c,根据用途分为:
确定测绘的人员,准备好测 绘工具,进行分工。
周天一:准备好要用的书籍,将自己 的想法运用到项目中。
葛瀚洋,汤超:整理测绘的图纸,使 用UG6.0进行绘图。
黄赛杰:制作WORD,PPT。
1.小组讨论,确定项目方案 2.市场调查,寻找零件 3.查阅相关资料 4.拆卸零部件 5.在图纸上简化的绘图 6.测量 7.UG绘图 8.成果展示
1.阀杆