斗轮堆取料机斗轮驱动电气控制系统的优化与改进
斗轮堆取料机控制系统优化的应用研究
工作研究—22—斗轮堆取料机控制系统优化的应用研究安曾华引言:斗轮堆取料机属于一种应用范围较广的机械设备,这种机械设备目前在电厂钢厂等领域都发挥着重要的作用。
其属于一种大型的连续性作业设备,在功能方面来讲,主要是物料的堆取,在斗轮堆取料机中斗轮机构属于核心部位,此部位的运行也会对设备的稳定性造成直接影响,在使用斗轮堆取料设备过程中还需要对电气控制系统进行重视,对电气控制系统进行逐渐的优化与完善,从而才能发挥出设备的全部作用。
1斗轮堆取料机的分类与构成1.1斗轮堆取料机的分类 斗轮堆取料机分类过程中,主要按照平衡类型进行划分,在现实的角度来讲,主要可以分成固定平衡类型以及活动平衡类型。
若是按照车尾不同的形式进行划分,则可以分成升降类型的尾车和固定式的尾车。
若是按照机型不同进行划分,则可以分成桥式以及门式。
1.2斗轮堆取料机的部件构成 在斗轮堆取料机部件构成的角度来讲,主要包含了中心料斗、门座、俯仰机构、上部结构、斗轮机构以及臂架输送设备等,系统通过以上设备组合而成,设备的主要功能为取料和堆料。
2斗轮堆取料设备自动化系统的原理在斗轮堆取物料设备工作原理的角度来讲,工作的初始阶段需要得到操作人员的工作命令,工作系统会对工作人员发出的命令进行接收与扫描,对接收到的堆料或者取料数据进行合理转化,通过激光扫描技术识别堆料范围,最终确定堆料或者取料的形状以及规模,中控系统中的PLC 也会根据实际情况采用不同的堆取料策略[1]。
在实际运营的角度来讲,主要可以分为两种不同的作业方式,分别为取料自动化作业和堆料自动化作业。
在作业的初始阶段需要确定堆取料机的具体位置,只有保证堆取料机位置的准确性,才能提升三维识别的精准度,系统还会对三维识别数据进行分析,最终为设备提供准确的位置数据。
斗轮堆取料设备还会根据实际情况选择取料或者堆料技术,实现自动化作业,作业过程中具有流量恒定特点,同时也提升了日常的工作效率。
在设备应用的过程中,大部分的工作指令都是由中控系统发出的,通过PLC 程序也能对工作现场进行监控,保证了工作安全性与工作质量。
斗轮堆取料机的电气改造
斗轮堆取料机的电气改造摘要:斗轮机是在散货堆场中,既能堆料又能取料的大型高效率连续装载机械。
它适用于轻比重松散物料,如煤,盐,砂等堆场中。
在斗轮机的主要金属结构完好的情况下,对其电气设备进行技术改造,可有效延长整机的工作寿命。
关键词:斗轮堆取料机电气设备技术改造斗轮机是在散货堆场中,既能堆料又能取料的大型高效率连续装载机械。
它适用于轻比重松散物料,如煤,盐,砂等堆场中。
目前有大量煤炭装卸任务的海港和内河港口中,在专用的系列化码头上,广泛使用这类机械。
某公司有四台斗轮机,由日本日立公司于上世纪八十年代中期设计制造。
经过二十多年的使用,在斗轮机的主要金属结构完好的情况下,为延长整机的工作寿命,有必要对其电气设备进行技术改造。
1 电气设备的现状斗轮机原PLC系统的型号为日立公司的P1000。
该系列的PLC在日本已经停产多年,备件费用高昂甚至买不到。
另外,原来监测PLC用的是20多年前的日立专用CRT显示器和编程器,这套工具在现场使用,很不方便而且随时有失效的可能。
斗轮机的主要运动机构及其功能如下:1)行走机构由3台22KW交流电动机拖动,通过电机的正反转实现斗轮机在铁轨上的前后走动,采取定子回路串入晶闸管交流调压器和转子回路串接电阻相结合的调速方法。
2)变幅机构由1台11KW交流电动机拖动臂架上升,下降,目的是实现堆,取料高度,采取转子回路串接电阻调速。
3)旋转机构由1台11KW交流电动机拖动臂架左旋,右旋,目的是实现堆,取料宽度,采取型号为HFC-VWC22HC的反相变换器来控制。
虽然原控制系统中引入了PLC,但PLC采集的点很少。
各个机构的联锁保护基本上用非常复杂的继电器逻辑来实现。
原控制系统经过20多年的运行,电气设备严重老化,导致故障率高,而且故障排除非常困难,严重影响斗轮机的输送能力。
斗轮机的效率低于原设计指标,斗轮机运行的可靠性和安全性难以保证。
而目前的生产任务持续紧张,不解决这个问题,就会影响到生产任务顺利完成。
华能南通斗轮堆取料机电气控制系统的优化与改进
机械化工华能南通斗轮堆取料机电气控制系统的优化与改进叶高军(杭州华新机电工程有限公司,浙江 杭州 310030)摘要:斗轮堆取料机作为一种大型的散料连续运输机器,它是以堆取物料为主要功能,在实际中具有较为广泛的应用。
本文将通过对斗轮堆取料机及其斗轮驱动电气控制系统的硬件配置分析基础上,结合斗轮堆取料机地斗轮驱动电气控制系统传统设计方案与局限性,对斗轮堆取料机地斗轮驱动电气控制系统优化与改进进行研究,以供参考。
关键词:斗轮堆取料机;斗轮驱动;电气控制系统;优化;改进华能南通斗轮堆取料机是1989年从意大利进口,运转30年之后,电气老化,故障率高,严重影响电力生产。
需要对原有电气进行自动化改造。
斗轮堆取料机是以斗轮机构为核心的大型散料连续运输机器,其中,斗轮机构的运行稳定性对斗轮堆取料机的安全与稳定运行有着直接的影响。
此外,斗轮堆取料机的斗轮驱动会受到电气控制系统的影响,因此,对斗轮堆取料机地斗轮驱动电气控制系统进行优化与改进,是促进斗轮堆取料机斗轮驱动良好运行,并确保斗轮堆取料机安全与稳定运行的有效措施。
1 斗轮堆取料机电气控制系统介绍 斗轮堆取料机电气系统组成,分为高压部分与低压部分。
高压部分由高压柜,变压器组成。
低压部分由电源部分,斗轮机构,悬臂皮带传输机构,回转机构,悬臂俯仰机构,拖车皮带机构,尾车机构,辅助机构。
电源部分:分为动力电源,控制电源,辅助电源。
动力电源为提供一个机构的电机电源。
如斗轮电机,皮带电机,回转电机等;控制电源提供二次回路的电源。
如接触器线圈电源,继电器线圈电源,PLC 电源,DC24V 电源。
斗轮机构带有液压耦合机械结构,采用直接启动电机控制方式。
悬臂皮带传输机构、回转机构、悬臂回转机构、拖车皮带机构采用变频驱动,变频驱动有启停平稳,对电网,机械冲击小,节能等优点。
悬臂俯仰机构、尾车机构采用液压驱动,液压驱动控制简单,同步效果好。
2 网络部分介绍 斗轮堆取料机的网络组成1个CMS 柜、PLC 中央处理器、5个PLC 分站、4个变频驱动子站、一个人机界面子站、3个编码器子站。
斗轮堆取料机的电气自动化设计改造
斗轮堆取料机的电气自动化设计改造摘要:本文主要研究了斗轮堆取料机自动控制系统的结构和原理,研究设计出斗轮堆取料机系统的原理组成及自动或半自动控制方法的实现,研究设计了关键控制系统的设计原理和模型,本实用新型适用于斗轮式、滑动式等装载机的生产。
适用于设备,可编程控制器,智能传输装置,总线,传感器,激光扫描仪,等等。
实现了斗轮装载机的实时监控与综合控制;在软件方面,利用可编程控制器来实现对软件的控制。
包括斗轮堆取料机的手动、联动和半自动控制程序,可以提高斗轮堆取料机的工作效率,降低人工成本,实现自检,通过系统控制实现数据查询等功能。
关键词:斗轮堆取料机;PLC;远程控制斗式装载机是水泥厂、冶炼厂、火力发电厂、焦化厂、港口等工业企业输送各类碳素原料、矿石和碎石的重要机械装备。
它是一种现代化、高效、连续的大型散装采矿工业设备。
本文提出对斗轮堆取料机的电气自动化进行进一步设计和改造,以开发其生产潜力,降低故障率,这对企业实现新的高产量和成功的第二家企业来说是非常实用的。
1.斗轮堆取料机的研究与应用19世纪30年代,德国开始研究斗轮挖掘机,当时德国是世界上设计和研究斗轮挖土机最古老的国家。
斗轮装载机的前身是斗轮挖掘机,其参数设计和结构设计以斗轮挖掘机为基础。
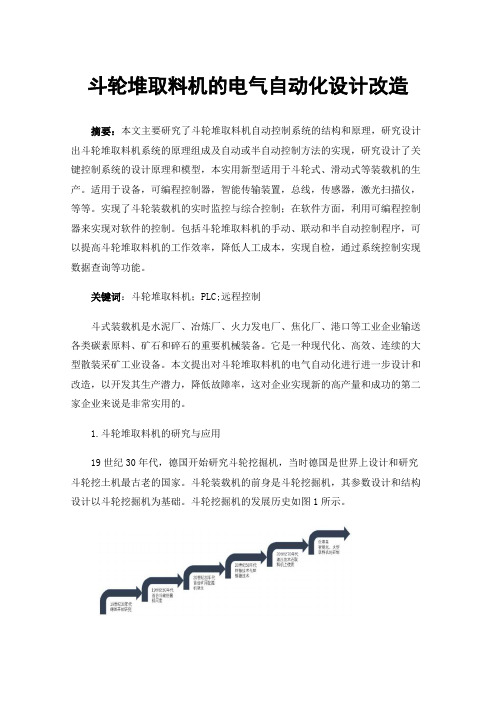
斗轮挖掘机的发展历史如图1所示。
图 1 斗轮堆取料机发展历程1916年,第一台斗轮挖掘机在德国煤矿投入实际开采。
1919年,斗轮挖掘机首次安装了履带式机器,通过履带式机器运输,这提高了采矿效率,也代表着斗轮挖掘机可以在工业中正式大规模使用的时代。
经过20世纪30年代的研究,柴油发动机被电动机取代,可以使用几种独立的驱动器。
1925年推出了第一台用于煤层条带开采的斗轮堆取料机,斗容量为0.075 m³,其工作形式为煤矿或砂矿。
1931年,英国ATG公司开发并引进了三种不同容量的铲斗旋转转轮设备。
1937年,柏林电气公司在Golepa矿成功引进了一种大型斗轮堆垛机,也是第一个使用六轨道斗轮回收装置的公司。
斗轮堆取料机斗轮机构驱动改造方案
斗轮堆取料机斗轮机构驱动改造方案批准:复审:初审:编制:2013年05月28日斗轮堆取料机斗轮机构驱动改造方案一、设备现状D285堆取料机(DQL600/600〃30),由湖南长重机器股份有限公司于2009年7月开始设计制造,2011年年初正式投入实用。
1.机器的基本参数为(参照技术协议规范书):(1)斗轮堆取料机形式机械式全爬尾车型号 DQL600/600.30额定生产率堆料 600(t/h)取料 600(t/h)斗轮机构:斗轮直径φ5000mm斗轮个数 8驱动方式液压马达驱动(赫格隆)驱动功率 55kw2. 环境条件多年平均气温:8.3℃多年极端最高气温:41.3℃多年极端最低气温:-32.3℃多年最大积雪深度:41cm历年最大冻结深度150cm二、设备使用出现的问题和不足1、由于冬天温度极低,有时气温最低将达-35℃,液压马达的油路系统虽有加热和保温装臵,但冬季工作依然故障频繁发生,甚至不能正常工作,严重影响斗轮机构的正常取料。
2、液压马达维护困难,维护成本高。
由于液压马达是将液压能转换为机械能,液压力很大,对其密封性能要求很高,而斗轮堆取料机使用的环境很恶劣,马达的密封圈等部件经常需要更换,每年更换这些零件的成本就大约几万元;3、液压马达驱动电气控制系统复杂故障判断排除困难,控制部分包括冲洗电机、冷却电机、油加热电机、液压马达主控电机的控制及这些信号的反馈控制等,若这些控制中任何一个控制系统出现问题,与斗轮机主机信号连锁报警,都可以能导致液压马达无法正常使用。
三、设备改进建议针对以上分析可以看出采用液压马达驱动在使用过程中因客观存在原因,暴露居多问题和不足,建议采用机械传动的方式,即电机→液力耦合器→减速器→驱动轴,减速机与驱动轴之间采用花键联接。
采用机械驱动控制简单,安装调试维修方便、成本低。
采用机械方式驱动,安全可靠,当斗轮机构出现过载的时候,液力耦合器可以对电机和减速器起到保护作用。
斗轮堆取料机无线控制系统改造
摘 要 : 河 津 发 电分 公 司斗轮 堆取 料 机 控 制 电 缆 , 取 料 机 行 走 回 转 频 率较 高造 成 控 制 电 缆 容 易 被 压 断 或 拉 断 , 制 电 在 控
缆 维护 量 大 。 换 电缆 成 本 高的 问题 。将 控 制 电缆 系统 改 为 无 线控 制 系统 , 造后 , 免 维 护 、 约 费 用 , 保 证 了设 备 运 更 改 可 节 且
不 仅 成 本 高 且 增 加 了维 护 的 时 间 和 人 力 。
行 安 全 可 靠 。 高 了工作 效 率 。 提 关 键 词 : 斗轮 堆 取 料 机 ; 制 电缆 ; 线控 制 控 无 中图 分类 号 : T 2 6 H 4 文献 标 识 码 : A 文章 编 号 : 1 7 9 7 (0 0 0 —0 60 6 43 9 一2 1 ) 30 1 2
并 没有立 即停止 行 性 .
矿 山 、 化 、 金及 大 型水 利 工 地 的 储料 场 , 堆 取 散 焦 冶 是
装 物 料 高 效 、 续 作 业 的 设 备 , 火 力 发 电企 业 生 产 经 连 在
营 中占有举 足轻重 的地位 。山西漳 泽 电力河 津 发 电分 公 司( 以下简称 河津 电厂 ) 装 了 2台长 春发 电设 备 总 安 厂生产的 MD 0 0 1 0 ・0型 门式 斗轮堆取 料机 , Q10 / 5 0 5 其 取 料 出力 为 10 0th 堆料 出力 为 15 0th 供 电方式 0 / , 0 / , 采用 卷筒式 。
W i e e s Co r lS s e a s o m a i n o c e h e t c e c a m e r l s nt o y t m Tr n f r to f Bu k t W e lS a k r Re l i r
DQL1500/1000·35型斗轮机斗轮驱动系统的优化分析
斗轮 堆取 料机 的拥有 量约 为 2 0 0台。它主 要 由 0 行走 机构 、臂架胶 带机 构 、旋转 机构 、变幅机 构 、
1 0t 、对象为煤炭。 0h O /
1 斗轮 驱动 系统概 况
斗轮机构及尾车机构这六大机构组成 。 斗轮 堆取 料机 的斗 轮驱 动机 构 为悬 浮式机 械
Abtat h u k t wh e s c e fG a g h uP r Gru j P r B a c a e sr c: eb c e - el t k r u n z o ot o p Xi ot rn h hv T a -o i
b e s d f r b u 0 y a s t eb c e —wh e r i g s se a p a a yto b e , e nu e o t e r , h u k t o a 2 e l i n t m p e r n u ls d v y m r
s se Thi e or a t o e u t y t m. sr f m h sgo d r s ls. go
K1 o v r i on r
b c e- wh e d i i g s s e ukt e l rv n y tm
状 、粒状 物料 堆取 料 作业 设备 ,广 泛应 用于 火 电 厂 、矿 山 、港 口、钢铁 、水 泥 等行 业 。全 国 目前
斗轮驱 动系统 基本 参数 为 : 5 w 日立 三相 异步 电 5k
机 、IZ 70 1 P 10 10日本住友二级行星齿轮变速箱 、
广 东 中兴 YO 5 0液 力耦 合 器 。取 料流 量 XA 0
港 口科技 ・ 科研与技革
D L1 0 / 0 0・ 5型斗轮机斗轮驱动系统 5 0 1 0 3 Q 的优化分析
斗轮堆取料机电气控制系统
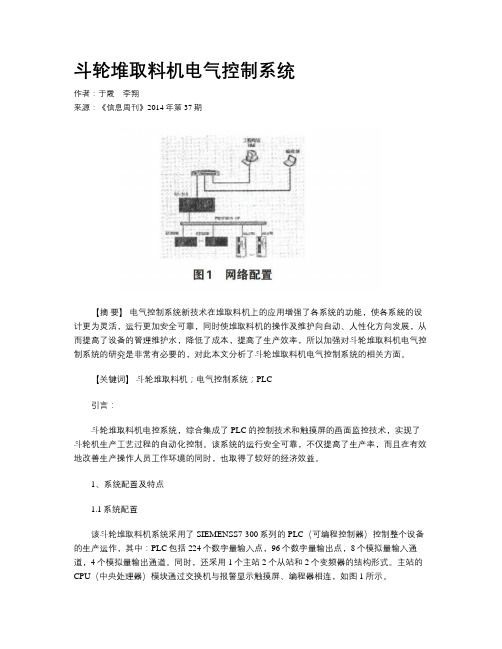
斗轮堆取料机电气控制系统作者:于霞李翔来源:《信息周刊》2014年第37期【摘要】电气控制系统新技术在堆取料机上的应用增强了各系统的功能,使各系統的设计更为灵活,运行更加安全可靠,同时使堆取料机的操作及维护向自动、人性化方向发展,从而提高了设备的管理维护水,降低了成本,提高了生产效率,所以加强对斗轮堆取料机电气控制系统的研究是非常有必要的,对此本文分析了斗轮堆取料机电气控制系统的相关方面。
【关键词】斗轮堆取料机;电气控制系统;PLC引言:斗轮堆取料机电控系统,综合集成了PLC的控制技术和触摸屏的画面监控技术,实现了斗轮机生产工艺过程的自动化控制。
该系统的运行安全可靠,不仅提高了生产率,而且在有效地改善生产操作人员工作环境的同时,也取得了较好的经济效益。
1、系统配置及特点1.1系统配置该斗轮堆取料机系统采用了SIEMENSS7-300系列的PLC(可编程控制器)控制整个设备的生产运作,其中:PLC包括224个数字量输入点,96个数字量输出点,8个模拟量输入通道,4个模拟量输出通道。
同时,还采用1个主站2个从站和2个变频器的结构形式。
主站的CPU(中央处理器)模块通过交换机与报警显示触摸屏、编程器相连,如图1所示。
1.2特点该电控系统具有以下特点:(1)加强了系统的工艺性,该系统加强了接受和管理原始数据及生产工艺数据设定计算功能,扩大了向基础自动化级发送有关生产指令和设定值的功能权限,并具有生产管理和设备管理等功能。
(2)控制功能庞大且综合性强,整套系统集中了多种机电设备的速度检测,位置检测及连锁控制功能。
(3)高性能的PLC控制器快速控制系统采用了SIEMENSS7-300系列的PLC,最快控制周期可小于1ms,适用于分布式生产过程的快速系统。
硬件系统元件为CPU指示,硬件集成化程度高,适用于工业现场环境。
该控制系统能满足“高速控制,高速通讯”的要求,系统控制周期速度可达2ms的数据更新速率。
(4)编程环境良好用于对PLC编程和组态的编程软件,具有强大的编程能力且操作界面简单。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
斗轮堆取料机斗轮驱动电气控制系统的优化与改进现今随着科技的进步,斗轮堆取料机斗轮驱动电气控制系统也需要进行相应的优化与改进,以此来避免斗轮堆取料机斗轮驱动电气控制系统在取料的过程中受到不规则料堆的影响,导致料斗嵌入前臂架太深,致使前臂架水平移动进而导致前臂架产生不规则振动对抖轮堆取料机造成破坏,鉴于此点一定要对斗轮堆取料机斗轮驱动电气控制系统的优化与改进。
标签:斗轮堆取料机;斗轮驱动;电气控制系统;优化与改进Abstract:Nowadays,with the development of science and technology,the electric control system of bucket wheel drive of bucket wheel stacker and reclaimer also needs to be optimized and improved accordingly. In this way,the electrical control system of the bucket wheel drive of the bucket wheel stacker and reclaimer is not affected by the irregular material pile in the process of reclaiming,which causes the hopper to be embedded too deep in the front boom. In view of the horizontal movement of the front boom and the irregular vibration of the front boom,it is necessary to optimize and improve the electrical control system of bucket wheel drive of the bucket wheel stacker and reclaimer.Keywords:bucket wheel stacker/reclaimer;bucket wheel driven;electrical control system;optimization and improvement斗輪堆取料机是一种应用非常广泛的机械,这种机械主要应用在钢厂、电厂等区域,属于一种大型散料连续运输的机器,其主要的功能就是堆取物料[1]。
斗轮堆取料机的核心机构就是斗轮机构,斗轮机构运行的稳定性直接影响着整个机器的安全稳定运行。
斗轮堆取料机斗轮驱动又取决于电气控制系统,因而对斗轮堆取料机斗轮驱动电气控制系统的优化与设计是至关重要的。
1 斗轮堆取料机的概述斗轮堆取料机是一种对散装物料进行连续堆取作业的高自动化和高工作效率机械设备,这种机械设备应用了现今的技术设备,同时拥有着较高的自动化水平。
正是因为具有很多现今的功能和技术,其被广泛的应用在冶金、化工、采矿等诸多行业中,用于对物料的转运和输送[2]。
斗轮堆取料机在运行的过程中是对散装物料进行连续堆取料操作的有轨装卸式机械,这种机械具有很强的规律性,同时在堆取料操作的过程中拥有着很高的自动化水平以及较高的生产效率。
其中的堆料操作具体指的是:将运来的物料通过地面系统皮带机堆送至指定料场,在实施堆料操作的过程中,将料场带式输送机输送过来的物料通过尾车卸至悬臂架带式输送机上,然后再输送至斗轮头部处,最后卸至料场的指定位置。
另外的取料操作具体指的是:在取料场中将需要转运的物料挖取至地面系统的皮带输送机上。
在进行取料操作时,将斗子切取的取料卸至悬臂架带式输送机的胶带上,然后再通过转卸操作卸到地面带式输送胶带上,然后地面带式输送机再将需要转运的物料运送至下一转运站中。
2 斗轮堆取料机斗轮驱动电气控制系统的硬件配置为了能够实现斗轮堆取料机控制系统的先进性,同时提高斗轮堆取料机斗轮驱动电气控制系统的自动化水平以及丰富其相应功能,满足系统控制下实施操作的具体要求,斗轮堆取料机斗轮驱动电气控制系统应该具有以下几项特点:整个斗轮堆取料机斗轮驱动电气控制系统应该采用分布式I/O远程控制的方式,与此同时要基于ControlNet现场总线控制技术实现对斗轮驱动的电气控制,在电气系统控制网络方面是利用乐PLC中央处理器的结构体系构建,其整个电气控制系统的全部通讯模块以及相应的处理模块均可以实现带电拔插操作,在设计PLC 梯形图的时候要使用RSLogix5000软件,同时还要使用RSView32对人机界面进行相应的编程,应用PanelView实现人机界面的自动化功能操作。
3 斗轮堆取料机斗轮驱动电气控制系统的传统方式斗轮机构驱动的方式重点涵盖着两种,其一是液压马达,其二是斗轮轴。
前者具有较高的驱动成本,因此应用并不广泛,很多的斗轮机构多是使用了电机驱动方式,主要是由电机、液力耦合器、减速器、斗轮驱动轴等共同组成,在进行驱动的时候,能够完成对驱动电机的直接控制,从而更好的完成相关的工作,其只能向着一个方向转动,无法实现反转。
斗轮堆取料机工作重点是依靠着斗轮机构的旋转,挖取相应的物料,借助于前臂架皮带机运输至料斗系统之中,从而便能到达相应的输送系统中,借助于底面皮带的传送作用,保证更好的进入到物料处理系统之中[3]。
受到多种因素的影响,料场内部的料堆形状各式各样,呈现出不规则的状态。
此时的操作就是先让大车停止,前臂架水平运动能够保证斗轮机构及时的从料堆中带出来。
斗轮机构的斗子一般是嵌入至料堆之中,其嵌入不规则形状物料较深,若是将斗子从料堆中取出来的时候,前臂架会呈现出较为明显的变形,振动频繁,严重影响到机器的使用,料堆甚至出现塌陷的情况。
4 斗轮堆取料机斗轮驱动电气控制系统新方法依照上述的分析,斗轮堆取料机的斗轮机构往往因为不能实现反转而面临较为严重的问题,特别是对斗轮机构的使用产生影响。
在进行电器控制系统设计的时候,需要重视原有电路的实际情况,分析其基本的运行状态,适当的增加交流接触器KM2,保证更好的完成斗轮电机的正反转[4]。
在斗子嵌入到形状并不规则的料堆时,需要及时的将大车停止,同时保证斗轮机构实现科学的反转,前臂架水平运动把斗轮机构及时的在料堆中带出来,从而更好的降低前臂架变形情况,合理的规避料堆的塌陷风险。
5 斗轮堆取料机故障处理方案及改进方案5.1 CPU控制器损坏问题若是位于核心位置的控制器被损坏,在后续的堆取任务中,将难以保证更加顺利的开展,PLC控制往往就是依靠着程序镶嵌基础加以实现,若是发现控制器部分被损坏,将需要采取科学的方案,针对于嵌入程序控制模块实现科学的更换,由此能够适当的节省维修时间,保证进行了重新设计的系统在实际发挥出控制功能的时候,趋向于完善,积极的迎合系统的使用需要。
若是控制功能出现了失效的情况,应该及时的借助于重新启动恢复相应的数据信息,由此达到较为理想的维修效果,若是出现此类问题,应该及时的启动控制器,如果存在着失效装填,则需对编写程序加以更新,适当的更换单片机模块,保证最终的效果有所改善,进入至更为稳定的行驶阶段。
控制器若是被损坏,还是会因为电压的不稳定性引发各种各样的问题,在实際开展的工作计划中,应该及时的对电压稳定性展开相应的调整,保证减少负面的影响,同时适当的节约可能出现的更多维修成本。
5.2 行走变频器损坏问题出现这种情况的原因就是漏水,若是控制器本身的防雨能力达不到一定的标准,在相应的环境之下,很容易出现变频器进水的情况,当短路之后,内部的组件也很容易被烧毁[5]。
借助于较为科学的手段,能够让防雨功能逐步的完善起来,通过对损坏的零部件加以检测,能够及时的对其完成更换,保证变频器本身的内部更加紧密,由此实现对现场的科学控制。
如果控制行走功能的变频器发生损坏,将会使得大车在实际行驶的时候,无法受到科学的控制,面对这样的问题,应该提前检验是否因漏水所致,之后对内部的零件安全性加以排查,由此可以适当的节省部分时间,保证功能更加健全[6]。
防水性能也应该展开定时的检测,若是发现存在的隐患问题,需要采取科学的维修措施,降低因为进水所致的零部件损坏程度。
在使用过程中,若是发现功能上出现异常问题,应该判断出是不是因为这类因素所导致,通过逐步的排查,确定关键问题之后,采取科学的检修方案。
5.3 PLC控制回路故障问题这种故障问题发生之后,回路系统不会再处于闭合的状态,电能也难以实现较为可靠的流通,很容易出现各种各样的隐患问题,这就使得斗轮堆取料机功能受阻,无法正常的发挥出功能。
回路故障的排查及改进往往应该较为系统的展开,依照开关部分的实际连接,分析是不是存在着短路的问题,针对于检测的结果加以概括,明确应该采取的更换处理方案[7]。
针对于控制信号的传输问题展开较为详细的分析,重点是依照传感器加以检验,其在接收信号的时候,能否将干扰信息合理的接入其中,对嵌入式控制程序进行适当的优化处理。
当故障检修工作完成之后,技术人员应该及时的落实检测工作,针对于发现的问题,采取适当的控制方案,避免其对于系统的正常运行产生负面的影响。
6 结束语现阶段,斗轮堆取料机斗轮机构只可向着一个方向进行转动,在进行取料的过程中,会因为料堆的基本形状存在着不规则的问题,使得机器本身的结构构件受到损坏,通过提出科学的控制方案,让斗轮取料机斗轮机构能够实现正常的正反转,妥善的处理一系列的问题。
参考文献:[1]马佰公.浅析斗轮堆取料机斗轮驱动电气控制系统的优化与改进[J].中外企业家,2018(02):136.[2]王建德.变频技术在斗轮堆取料机尾车俯仰控制中的应用[J].起重运输机械,2013(12):124-126.[3]石亚茹,孙英培,李永聪,等.基于CC-Link总线的悬臂式堆取料机控制系统设计[J].制造业自动化,2013,35(15):125-128.[4]李品,张庭亮.浅析菲律宾门式斗轮堆取料机控制系统技术应用[J].中国新技术新产品,2013(12):15.[5]李保春.基于ControlLogix5000 PLC的斗轮堆取料机电气控制系统[J].自动化应用,2013(06):55-57.[6]张其辉.基于PROFIBUS-DP总线的PLC在斗轮堆取料机中的应用[J].电工电气,2010(11):52-55.[7]刘振兴,何恩江.变频调速在斗轮堆取料机行走控制系统中的应用[J].变频器世界,2006(06):90-91.。