臂式斗轮堆取料机新型控制系统的设计
斗轮堆取料机的电气自动化设计改造
斗轮堆取料机的电气自动化设计改造摘要:本文主要研究了斗轮堆取料机自动控制系统的结构和原理,研究设计出斗轮堆取料机系统的原理组成及自动或半自动控制方法的实现,研究设计了关键控制系统的设计原理和模型,本实用新型适用于斗轮式、滑动式等装载机的生产。
适用于设备,可编程控制器,智能传输装置,总线,传感器,激光扫描仪,等等。
实现了斗轮装载机的实时监控与综合控制;在软件方面,利用可编程控制器来实现对软件的控制。
包括斗轮堆取料机的手动、联动和半自动控制程序,可以提高斗轮堆取料机的工作效率,降低人工成本,实现自检,通过系统控制实现数据查询等功能。
关键词:斗轮堆取料机;PLC;远程控制斗式装载机是水泥厂、冶炼厂、火力发电厂、焦化厂、港口等工业企业输送各类碳素原料、矿石和碎石的重要机械装备。
它是一种现代化、高效、连续的大型散装采矿工业设备。
本文提出对斗轮堆取料机的电气自动化进行进一步设计和改造,以开发其生产潜力,降低故障率,这对企业实现新的高产量和成功的第二家企业来说是非常实用的。
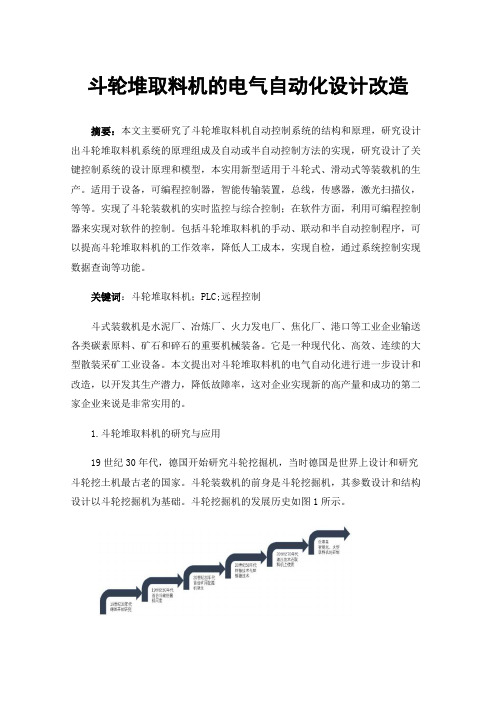
1.斗轮堆取料机的研究与应用19世纪30年代,德国开始研究斗轮挖掘机,当时德国是世界上设计和研究斗轮挖土机最古老的国家。
斗轮装载机的前身是斗轮挖掘机,其参数设计和结构设计以斗轮挖掘机为基础。
斗轮挖掘机的发展历史如图1所示。
图 1 斗轮堆取料机发展历程1916年,第一台斗轮挖掘机在德国煤矿投入实际开采。
1919年,斗轮挖掘机首次安装了履带式机器,通过履带式机器运输,这提高了采矿效率,也代表着斗轮挖掘机可以在工业中正式大规模使用的时代。
经过20世纪30年代的研究,柴油发动机被电动机取代,可以使用几种独立的驱动器。
1925年推出了第一台用于煤层条带开采的斗轮堆取料机,斗容量为0.075 m³,其工作形式为煤矿或砂矿。
1931年,英国ATG公司开发并引进了三种不同容量的铲斗旋转转轮设备。
1937年,柏林电气公司在Golepa矿成功引进了一种大型斗轮堆垛机,也是第一个使用六轨道斗轮回收装置的公司。
plc课程设计--斗轮堆取料机的PLC控制系统设计{修}

《机电系统及PLC》综合设计题目:斗轮堆取料机的PLC控制系统设计院系:机械工程学院专业班级:机械1111学生姓名:2014年11月目录目录 (2)第一章课程设计任务 (1)第二章总体方案分析 (2)2.1 分析控制要求 (2)2.2 选择PLC型号 (2)2.3 分配I/O点........................................................................... 错误!未定义书签。
第三章PLC控制系统设计 .. (5)3.1 输入/输出电路设计 (5)3.2 控制程序设计 (6)3.2.1 梯形图设计 (6)3.2.2 指令表 (14)3.3 控制程序分析 ................................................................... 1错误!未定义书签。
第四章课程设计小结 (17)参考文献 (18)第一章课程设计任务在经济发展的过程中,很多地方需要对一些散料进行装卸,随着科技的发展,自动化程度越来越高。
以往的人工操作已经无法满足社会的需求。
斗轮堆取料机是连续输送机的一种,应用它可以将物料在一定的输送路线上,从装载地点以恒定的或变化的速度进行输送。
应用堆取料机还可以形成连续的物流或脉动的物流。
在现代化的港口散货装卸作业中,斗轮堆取料机是生产过程中组成有节奏的流水作业运输线所不可缺少的组成部分。
使用堆取料机,可以与其他连续输送设备组成不同的工艺流程,以满足不同泊位、不同堆场、不同作业点的生产要求。
堆取料机不仅对港口内部散货装卸起重要作用,又对港口外部运输起重要作用。
收集斗轮堆取料机控制系统有关资料的基础上,根据斗轮堆取料机工作原理制定一套斗轮堆取料机控制系统,使其能实现堆取料的工作,大大提高了其运行效率、具有安全可靠、一次性投入低、动力消耗小、操作简单、便于维护、工作人员少和运送效率高等特点。
浅谈侧式悬臂堆料机桥式斗轮取料机控制系统的设计
P R O F I B U S — D P 、 光 纤通 讯等 的应 用 。
关键 词 : 控 制理 论 ; P L C: 工业 以 太 网
1堆取 料机 控 制系 统现状 1 . 1堆 取料 机 的特点 侧式悬臂堆料机桥式斗轮取料机具有 占地面积小 ,物料贮量大 等优点是现今应用最广泛的均化设备 , 在港口、 码头、 大型 电厂、 水 泥 厂、 矿山都可以见到它的影子。随着科学技术的不断发展 , P L C功能 日渐 强 大 , 网络 通 讯 功能 的应 用 , 使 功 能控 制 更 加 集 中 , 监 测 能力 更 加完备 , 侧式悬臂堆料机和桥式斗轮取料机控制技术也 日臻完善。 1 . 2堆取 料 机 的工艺 流程 侧式悬臂堆料机和桥式斗轮取料机配套使用 ,侧式悬臂堆料机 由堆料臂 、 配重块 、 驱动装置 、 液压系统、 主控制室 、 动力电缆卷盘 、 控 制电缆卷盘和来料小车等部分组成 ; 桥式斗轮取料机 由收料皮带 、 耙 车、 斗轮 、 行走小车、 动力电缆卷盘及控制电缆卷盘等部分组成。 侧式 悬臂堆料机采用往复鳞状堆料的方法 ,桥式斗轮取料机采用横断面 取 料方 法 。 1 . 3堆取 料 机 的控制 方式 侧式悬臂堆料机和桥式斗轮取料机分三种控制方式 , 自动方式、 手动方式 、 维修方式 , 其中 自动方式又分为机上 自动和中控室 自动 , 中控 室 自动 控制 实 现 了设 备 的远 程遥 控操 作 。 1 . 4堆取料机动作联锁流程 侧 式悬 臂 堆料 机 和 桥式 斗轮 取 料机 在 同一 个料 场 工作 ,正常 工 作 时它 们是 相对 独立 的个 体 。
侧式悬臂堆料机 自动工作时的起机顺序是首先将悬臂降低至下 极限, 由中控室或机上发出 自动工作命令 , 堆料机发出起机响铃预警 1 5 秒, 之后皮带启动, 5秒后 , 行走驱动运行并伴有移动警告 , 堆料机 在堆料 区域往返行走 , 卸料皮带机同时卸下物料 , 堆料机在远离料场 中心 一侧 的停 留点是 固定 的 , 称 为 固定 点 。 在 靠近 料场 中心一侧 的停 留点 是可 变 的 , 即每次 回缩 一段 距 离 , 称 为 可变 点 。为保证 堆形 , 堆 料 机 在 固定 点 、 可 变点 的停 留时 间是 可 调 的 。每次 堆料 时 , 堆料 机 总 是 向 固定 点方 向行走 , 在 固定点 与 可变 点之 间 往返 行走 进 行堆 料 , 直 到 堆料臂上的料位检测开关触料后液压俯仰系统工作 ,这时俯仰系统 自动 上 升一 段 距离 ,待 堆 料机 达 到堆 满 开关 时会 向中控 室 发 出堆 满 停车申请 ,中控室或机上发 出正常停机命令停止堆料皮带和堆料机 的运 行 。侧式 悬臂 堆料 机 会按 起动 时 的相 反顺 序依 次停 车 。 3 - 2工 业 以太 网 桥式斗轮取料机自动工作的起删 顿序是 ,启动命令发出响铃 1 5 本项 目中工业以太网的应用是为了实现堆料机与取料机之间的 秒, 响铃完毕启动输送皮带, 5秒后斗轮启动 ( 由于料场位置不同, 斗 信息 传递 。 轮旋转的方向不同) , 7秒后斗轮小车后行( 靠近控制室一侧 ) , 待物料 工业 以太 网的特 点 : 取完一个横断面 , 斗轮小车后行碰到后行程 , 这 时斗轮小车停止 , 取 ( 1 ) E t h e r n e t 是全开放 、 全数字化的网络 , 遵照网络协议不同厂商 料 机大 车会 向前运行 ( 靠近物料 ) 0 . 5米 , 之后斗轮小车前行 , 待碰到 的设备可以很容易实现互联 。 前行程 , 斗轮又完成一个 横断面取料 , 小车停止 , 大车向前 运行 0 . 5 ( 2 ) 以太网能实现工业控制网络与企业信息网络的无缝连接 , 形 米 。取料机如此反复工作 , 直到碰到料取完限位。取料机的停机顺序 成企业 级 管控 一体 化 的全开 放 网络 。 是 起 机 的逆 续 , 先 停 大 车行 走 和 小 车 行走 , 之后 是 斗 轮 , 最 后 停输 料 ( 3 ) 软硬件成本低廉 , 由于 以太网技术 已经非常成熟 , 支持以太 皮带。 网的软硬件受到厂商 的高度重视和广泛支持 ,有多种软件开发环境 侧式 悬 臂 堆料 机 和桥 式斗 轮 取料 机 正常 停机 后 ,堆 料机 大臂 抬 和硬件设备供用户选择。 到上极 限 , 取料 机 的斗 轮开 到后 行 程 , 以便 两 台设 备交 叉换 堆 。 ( 4 ) 通信速率高, 随着企业信息系统规模的扩大和复杂程度 的提 2堆 取料 机设 计 的原 则 、 硬 件及 辅助 系统 设计 高, 对信息量 的需求也越来越大 , 有时甚至需要音频 、 视频数据的传 2 . 1 P L C硬 件 的组态 选择 输 ,目前以太 网的通信速率为 1 0 M、 1 0 0 M 的快速 以太 网开始广泛应 本文 介 绍 的侧 式悬 臂堆 料 机 和桥 式斗 轮 取料 机 其控 制 系统有 如 用 , 千兆 以太 网技术也逐渐成熟, 1 0 G以太网也正在研究 , 其速率 比目 下特点 : 前 的现 场 总线快 很 多 。 选用 西 门 子 S 7 3 0 0系列 P L C ; 由E T 2 0 0和有 源底 板 构成 的可热 ( 5 ) 可持续发展潜力大 , 在这信息瞬息万变的时代 , 企业的生存 插拔的输入输 出模块系统 ; 堆料机 、 取料机与中控室采用 D P通讯 , 中 与发展将很大程度上依赖 于一个快速而有效 的通信管理 网络,信息 控室为 D P通讯的主站 , 堆料机和取料机 为 D P通讯的从站 ; 堆料机 技术与通信技术的发展将更加迅速 , 也更加成熟 , 由此保证了以太网 与 取 料机 之 间 的通 讯采 用 工业 以太 网 ,堆 料 机为 主 站 ,取料 机 为从 技 术不 断地 持续 向前 发展 3 - 3 PROFI BUS — DP 站, 两种通讯都通过光纤介质传输 , 在硬件选型时需要选用将 D P信 号转变为光纤信号的 O L M 以及将工业 以太 网的电信号转换为光信 P R O F I B U S— D P用于现场层的高速数据传送 。主站周期地读取 号 的光电转换器 , 并将运行时的数据显示在西门子触摸屏上 。 从站的输入信息并周期地 向从站发送输出信息。总线循环时间必须 2 . 2堆 取料 机驱 动 系统 的设 计 要 比主站 ( P L C )程 序循环 时间短 。除周期性 用户数据 传输外 , 2 . 2 . 1侧式悬臂堆料机主回路 P R O F I B U S ~ D P还提供智能化设备所需的非周期性通信以进行组态 ,
斗轮取料机的控制系统探究

命长 、功耗低 、响应速度 快、有防止相互干 扰机能。所选用 的型号为
E3 - S- M 1 。 CD1- J 1
定 点 斜 坡取 料 工 艺 图 当物料堆成规则形状后 ,则取料作业可以开环方式进行控制。传统 的继电器控制系统有着十分明显的缺点 :体积大、耗 电多 、可靠性差 、 寿命 短 、运行 速度 慢 、适应性差 ,尤其 当生产工艺发生变化 时 ,就必 须重新设计、重新安装 ,造成时间和资金的浪费。斗轮堆取料机P C L 控 制系统具有以下优越性 。1 程序运行可靠 、无误动作 ,使设备的安全 ) 性 、可靠性和稳定性大大提高 。2)故障率低 ,抗干扰性好 ,可靠性 高 飞 ,运行稳定 ,维护方便 ,节省了安装调试和 日常的维修 费用。3 )延 长了设备 的使用 寿命 ,提高了设备的生产率 ,降低了工人 的劳动强度。 4 提高了斗轮堆取料机的现代 自控制水平 和整机的经济价值 。5 修改 ) )
魏霸
应 用科 学
1 1 1
斗轮 取Байду номын сангаас机 的控制 系统探究
许 洋 , 叶 平
(中国矿业大学 ,江 苏徐州 2 10 2 0 8)
摘 耍 悬臂式斗轮取 料机是取料机 械中的一种 ,它广泛应用 于港 口、内陆的散料场所 ,主要用 于取煤和矿石 。工作时 ,取 料机沿着轨 道行
进 ,并能 改变臂 架的角度 。因为悬 臂式斗 轮取料 机 比较容 易实现 自动控制 ,采用 P C L 进行 对取料 过程 的控制 ,它具有可 靠性 高,抗 干扰 能 力强 ,编程直 观、简单 的优 点。
关键 词 悬臂 式斗轮取料 机 ;控制工艺 ;P C L 中图 分类 号 T 23 文献 标识 码 A P7 文章 编号 17 —6 1( l】 10 1- 1 6397 一2 0 — 110 Oo 6
新型臂式斗轮堆取料机研制
新型臂式斗轮堆取料机研制摘要:新型臂式斗轮堆取料机是利用斗轮连续取料,是一种大型、连续、高效的散料装卸机械,适用于长方形料场,是目前应用最广最多的一种散料堆取设备。
在保证料场存储能力的同时,料场面积日趋缩小,这将带来整机高度增加、钢结构重量增多、轨道两侧轨下距离增加、斗轮悬臂俯仰角度增大、整机重心偏移较大等一系列技术难题,任何一个参数的改善都会建立在牺牲其它参数的基础上,必须在众多方案中找到一个平衡点,做到结构最优化。
本文就新型臂式斗轮堆取料机研制展开详细的讨论。
关键词:新型臂式斗轮堆取料机;整机重心偏移;钢结构一、研究的必要性1、国内外技术动态1960年,从国外引进的第一批斗轮机是我国对斗轮机应用、研究和开发工作的开始,第一台型号DQ5030的斗轮堆取料机由哈尔滨重型机械厂于1970年研制成功,进入20世纪80年代随着电力工业和钢铁工业的发展,在电力部门的使用数量有很大提高,并且在港口上的使用量剧增。
20世纪90年代国内斗轮堆取料机的事业向着更多、应用更广的方向发展。
截至到目前,应用比较多的机型生产能力已经达到1500TPH~4000TPH。
国内已有为巴西淡水河谷设计10000TPH大型斗轮堆取料机的业绩。
在国外,不少公司和制造单位已经推出大能力的悬臂式斗轮堆取料机。
比如:TAKRAF GmbH官方网站公布的可生产的取料机为:能力500~20000TPH,轨距6~20m,臂长25~60m;UNIVERSAL WORLDWIDE LLC公司公布的最大取料机能力已经达到12000TPH,50m臂长;Ishikawajima Transport Machinery Co.,Ltd.(IUK)给澳大利亚Newcastle,N.S.W.提供了8000TPH,59m悬臂的取料机,给加拿大Westshore Terminals Ltd提供了6,500/4,500 lt/h的堆取料机设备。
公司研制新型臂式斗轮堆取料机是根据华润锦州电厂实际需求而研制的产品。
斗轮式堆取料机无线控制系统设计

2016 NO.06SCIENCE & TECHNOLOGY INFORMATION信 息 技 术斗轮式堆取料机是一种大型高效的装卸机械,能够实现物料的挖取、堆放、混匀等,在大型散料港口、发电厂、焦化厂、钢铁企业、水泥企业、矿山的散料料场等领域被大量使用。
随着港口、电厂、钢厂等领域对经济发展的重要性日益增加,对提高斗轮式堆取料机的工作效率提出了新的要求。
先进的控制方案在斗轮堆取料机上的应用,将会有效增加其自动化技术含量,提高工作效率[1]。
斗轮堆取料机早期的控制方法是采用接触器和继电器来组成有线控制系统,从而实现系统的开关量控制,这种控制方式能够在一定程度上实现斗轮堆取料机的自动控制,但由于其触点和电缆的使用量过多而导致其控制线路较为复杂、不利于日常维护及检修。
为了解决控制线路复杂、维护维修难的问题,该文设计了一种基于无线网络的斗轮式堆取料机控制系统[2]。
1 控制系统结构从专业化角度出发,斗轮式的堆取料机主要是由尾车伸缩机构、悬臂胶带机、回转机构、电缆卷筒机构、斗轮机构以及变幅机构等组合而成的,相应的附属电气部分又包括照明电气、应急灯与司机室取暖器等。
堆取料机中的悬臂胶带机构运作机制是通过电机驱动以及辊子带动胶带进行转动。
其中的斗轮机构主要包括8个斗齿以及总承,在电机驱动之下开展取料作业。
相应的变幅机构将会借助电机来带动钢丝绳滚筒进行不断转动,然后促进悬臂抬起或者是放下,这种情况下制动器将会采用液压推杆的形式。
堆取料机的回转机构会借助变频器的控制电机在整机前半部分进行左右的旋转,推动堆取料工作的顺利开展。
堆料机中的大车行走机构主要包括六台相同形式的电机驱动滚轮,有助于达到整机行走的目的。
堆取料机中的各个设备在体积上都相对较大,且每个驱动元件、检测元件以及执行元件之间的距离都相对较远,其原控制系统将继电器控制作为运行主体,具体故障发生率相对较高以及维修时间相对较长的特点。
为了在一定程度上确保堆取料作业有序进行,然后对故障进行及时排除,必须要比较频繁地在每个组成机构之间实施数据通信与协调控制。
斗轮堆取料机智能控制系统研究

斗轮堆取料机智能控制系统研究摘要:本文主要介绍了国内斗轮机控制系统的发展以及一种新型的斗轮堆取料机智能远程控制管理系统。
该处理系统通过对执行的任务和反应堆取料机上各种传感器返回的数据进行数据处理。
设备相关自动控制指令经控制系统处理形成后发出,完成斗轮堆取料机自动运行。
关键词:斗轮堆取料机;智能控制系统;研究策略引言:斗轮堆取料机是用于码头、电厂、露天矿场散料转运的一种高效的装卸设备。
目前大部分斗轮堆取料机采用“驾驶室手动”操作模式,堆取料机精度低,运行管理效率低。
斗轮堆取料机是一种露天储存设备,现场的灰尘会极大地遮挡司机的视线,尤其是在夏季多雨、多雾、夜间等恶劣环境下,容易发生事故。
随着科学技术的发展,数据处理技术和检测技术都有了很大的进步。
基于此,本文提出了一种提高效率和安全性的斗轮堆取料机自动运行控制系统。
一、斗轮堆取料机控制的发展1.1单机手动控制阶段从20世纪60年代到70年代,斗轮堆取料机主要由两组分立的自动继电器、接触器和多芯电缆等组成。
控制管理系统软件中的自动位置检测和自动控制保护开关仍处于初步设计阶段,主要使用简单的机械控制开关,检测操作精度和保护性能水平较低。
斗轮堆取料机的所有监控和操作只能是驾驶室内单个司机的现场监控和操作,不能满足多个系统之间同时联锁操作的要求。
堆取料机和现场监控管理中心通过多芯电缆连接继电器电路实现。
监控管理中心对设备的内部监控操作只能通过传统的监控模拟器和仪表板来实现,信息和数据的传输需要手动实现。
这种控制系统由于电路复杂、体积庞大、自动化程度低,很难完全满足大型自动化设备生产线的要求。
1.2半自动控制阶段该阶段堆取料机的设计中引入了各种可编程控制器和变频器。
由于PLC及变频器的广泛使用,大量减少了接触器、继电器与控制电缆,降低了堆取料机的实际功耗,但其稳定性和工作效率也有了很大提高。
堆取料机的正常运行主要由机车司机手动控制,但同时程控上位机也有一定的自动控制权限。
基于PLC的悬臂式斗轮堆取料机控制系统设计

基于PLC的悬臂式斗轮堆取料机控制系统设计悬臂式斗轮堆取料机属于大型散料装卸设备,广泛应用于港口、火力发电厂、大型焦化厂等行业。
随着经济不断发展,现代工业对斗轮堆取料机的控制系统要求也越来越高。
本文根据现场对设备的要求,设计开发了一种具有高可靠性的悬臂式斗轮堆取料机电气控制系统。
本文分析了悬臂式斗轮堆取料机的发展情况,阐述了课题所设计的悬臂式斗轮堆取料机控制系统的堆取料工艺流程和主要机构,给出了基于PLC的控制系统设计方案。
结合堆取料机的技术参数及工艺流程,本文对各个机构的驱动原理及控制方式进行了设计研究,针对不同机构的不同控制方式,完成了关键电气设备及元件的选型工作。
同时,系统设计了较为完善的检测保护系统,在各机构的关键位置设有多级限位保护开关,并应用了编码器及RFID技术,保证系统安全运行。
控制系统的网络通讯方案,则是通过PROFIBUS-DP现场总线和Ethernet以太网技术来实现的,并采用双CPU冗余技术,设计编写PLC程序,通过程序控制,实现了设备的可靠、稳定运行,提高设备的生产效率。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
等 特 [ 3 1 。
Pob s r u 符合 国际 标 准 IC 15 ,是 世 i f E 6 18 界 上通 用 的现 场 总线 标准 之一 ,并 以其 独特 的技 术 特 点 , 格 的认 证 规 范 、 放 的 标 准 、 严 开 众 多 厂 商 的 支 持和 不 断 发展 的应 用 行 规 , 成 为 现场 的最 优 解决 方案 [ 4 1 。 3 应用 了总线 控 制 的的臂 式 斗轮 堆 取料 机 控制 和通 讯 系统 设 计 以 P C为核 心 , 用 先 进 的 现场 总 L 采 线 方式 , P C 变 频器 、 摸屏 、 将 L、 触 检测 系统 连 接在 一 起 ,控制 臂 式斗 轮堆 取 料机 各 机构 的 运行 。 系统 采用 SE N 本 IME S公 司的 Pob s r u— i f D P总线 控 制 系统 ,所 有 的 网络 元 件 都 要 和 C U通过 总线 进 行数 据交 换 。 P 31臂式 斗轮 堆取 料 机 的硬件 系统 设计 . 臂 式斗 轮堆 取 料机 的 电气 控 制系 统 由 电 源部 分 、 电动 机控 制 中心 ( C 、 MC )变频 调速 系 统、 操作 台 、L P C及 触摸 屏等 组 成 。 P C是 系统 的控制 核 心 ,采 用 SE N L I ME S 公 司 的 s 0 7 30系列 可编 程序 控 制器 , 主机 采 用 C U 1— D , 供 一 个 P O IU P接 P 352P提 R FB SD
摘 要 : 东轻 厚横 切机 组 主要 用 于对 厚 为 2 ~ 0 m 哈 . 1 . m铝及 铝 合金 卷材 经开卷 、 直 、 边后 , 设 定 长度 切成 板 块 , 由皮 带机 0 O 矫 切 按 再 送 至成 品垛 板 台垛 成 整 齐的板 垛 。本 文介 绍 了哈 东轻厚 横切 机 组控 制 系统 的组 成 。
卷 材 经 开 卷 、 直 、 边 后 , 没定 长度 切 成 矫 切 按
关 键 词 :7 4 0; T 0 M; I 0 P S — 0 E 2 0 S 2 ; ROFB — [US DP; 业 以 太 网 工
中图分 类 号 :E 6 T 9
文献 标 识码 : A
引
超 大 规 格 特 种 铝 合 金 板 带 材 项 目生 产 线 , 要用 于 对 厚 为 2 ~ 0 m 铝 及铝 合 金 主 . 1. m 0 O
一
・Hale Waihona Puke | ? |
D
_ 吼 毋
瞻
^ 由 皿四 号 露孵
i
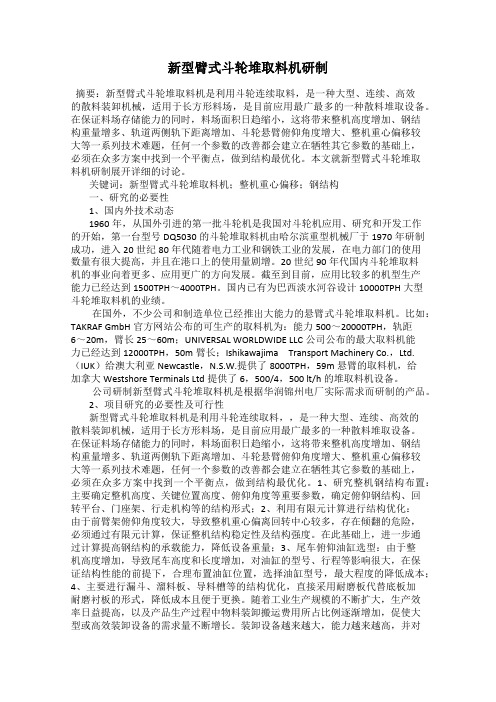
图 2 S E 7 自动 堆 料 编 程 段 T P
: 等 , 等
结论
网I内 {l j
l
变 频 器 采 用 施 耐 德 公 司 的 A v 1变 频 T7
器。
t 0
豳 ∞
软起 动 器采 用西 门子 公 司的 3 W4 。 R 4 变频 器 、 界 面 等现 场装 置 , 过独 立 人机 通 的 Pob sD 接 口直接 连 接 到现 场总 线 上 。 r u— P i f P C通 过 逻 辑 运 算 处 理 发 出 相 应 的 数 字 信 L 息 , 而控制 现 场装 置 的工作 运行 。 从
i
2j c I— H , 慢 M 35 2 " l I l 口 l h i 届 l , t I , I 3 I
} } 0
■踟 f l l l 帷 q I I I I I I I j
l
I
{
l 】 I l l
一
中插 入 相应 的可 编 程 序 控制 器 的硬 件 结 构 。 如图 1 所示 : ( ) 目程序 开发 3项 旦 完成 了硬件 组态 ,就 可 以 为可 编程 模 板 生成 软 件 ,选择 编 程语 言 ,完成 程 序逻 辑 。S E 软 件 为客 户提 供 多种 编程 语 言 , T P7 包括 语 句表 S L T 、梯 形逻 辑 L D、功 能 块 图 A F D S L 构控 制语 言 等等 。本设 计采 用语 B 、C 结 句表 S L和梯形 图 L D进 行设 计 。 T A 3 - 式 斗 轮堆 取 料 机软 件 控 制 系统 的 3臂 编程 实例 如 图 2 示 为一段 斗 轮堆 取 料机 自动堆 所 料 程 序 , 用 L D梯 形 图编制 。 采 A 程 序 块 中包 含 了堆 料 联 锁 工 艺 流 程 , 只 有 满足 各 种工 作条 件 , 能激 活输 出 点 , 才 斗轮 堆 取 料 机 各 个机 构 才 能 互 相 配合 顺 序 运 行 。 为 了方便 阅读 和 编程 ,通 常 要将 I / 进 行 O点 定 义 ,通 过 Se 软件 提供 的 符号 编辑 表就 t 7 p 可 以轻 而 易举 地完 成 。 I 代表 数 字输 入 ;Q代 表 数 字 输 出 ;M ・ ・ 代 表 中 间变 量 ;PW 代 表 输 入 字 ;P W 代 ・I ・Q 表 输 出字 。
中国新技 术新产品
一1 9 2—
J
:
Chn w T c n lge n rd (s ia Ne e h oo isa d P o u : t
工 业 技 术
哈 东轻 厚横切 机 组控 制 系 统组 成 的探 究
胡 泽 万 丽
( 方 重 工 电控 液 压 设 备 分 公 司 , 宁 沈 阳 10 4 ) 北 辽 10 1
工业技术
C awcoin oc●— ■■ ■ h hl d ds啊 ■■■阻 ■ iN T ngaPu 瞄回囫图疆阉 n ee e t os r
臂 式斗轮堆取料机新型控制系统 的设 计
孙 喜 胜 遇广 字 国 占一
( 北方重工集 团有限公 司, 辽宁 沈阳 10 2 ) 10 7
摘 要: 介绍 以工业控 制 计算机 为核 心部件 , 可 编程控 制 器技 术 、 场 总线技 术 及计 算机 通信 和 管理 技 术相 结 合 , 用于 大型散 料 将 现 应 输 送装 备一 斗轮 堆取 料 机 , 立 了具 有 实时监 控 和 管理 能 力 、 障诊 断能 力 , 可 实现 遥 操作 和 远程 技 术跟 踪服 务 的斗 轮堆 取 料机 建 故 并
口。
3 . 式斗 轮堆 取 料机 软件 控制 系 统 2臂 根据 控制 系统 的硬 件 ,选择 相 应 的编 程 软件 对系 统 的控制 流 程进 行 开发 。西 门子 专 门 为客 户 提 供 了 程 序 开 发软 件 SE 。 T P 7 S E 是 用 于 SM TC可编 程 序 控 制 器 的 T P7 IA I 组态 和 编 程 的标 准 软件 包 , 是 SM TC工 它 IA I 业软 件 的组成 部 分[ 5 1 。 ( ) 料 程序 控制 任务 1堆 在 斗 轮堆 取料 机 堆 料 P C控 制程 序 中 , L 断续 回转 + 断续 行 走 定 点 堆料 是 经 常 采 用 的 种 工作 方式 。首 先 将 大 车行 走到 预定 料 场 位 置 , 堆 料程 序 , 系统 发 出堆 料作 业 信 启动 给 号 并 实现 与 系统胶 带 工况 联 锁 。通 过编 码 器 和物 位 计 的 采 样 、 送 、 辑 运 算 , 出 判 断 传 逻 做 进 行 悬臂 回转 和 大 车行走 动 作 ,实 现斗 轮 堆 取 料 机 的堆料 作业 。 ( ) 料程 序控 制任 务 2取 在斗 轮 堆 取料 机 取 料 P C控 制程 序 中 , L 采 用 旋转 分层 不分 段 取料 。首先 将 大车 开 至 预 定 取料 位置 。 当接到 系统 取 料指 令后 , 动 启 取 料 程序 , 轮在 程序 控 制下 顺 序启 动 , 过 斗 通 编 码器 分 别进 行取 料 初始 角 和取 料终 止 角 的 角 度 采集 、 和 存贮 , 定悬 臂 回转 的取 料 传送 确 范 围 。实 现斗 轮堆 取料 机 的取料 作业 。 3 . 式 斗 轮堆 取 料 机软 件 控 制 系 统 的 2臂 解 决 方案 ( ) 建并 编辑项 目 1创 项 目可用来 存 储 为 自动化 任 务解 决 方案 而 生成 的数 据 和程 序 。这 些数 据 被 收集 在一 个 项 目下 , 包括 : 件 结构 的组 态 数据 及 模 板 硬 参数; 网络 通讯 的组 态 数据 , 以及 为 可编 程序 模 板 编制 的程 序 。生成 一 个项 目的 主要 任 务 就是 为 编程 准 备这 些 数据 。数 据 在一 个 项 目 中以对 象 的形 式存储 。 ( ) 目硬件 组态 2项 通过 SE T P 7编程 软 件 对 臂 式 斗 轮堆 取 料 机控 制 系统 的硬 件 配置 进行 组 态 。在 项 目
脚 硎 l l
‘ {I Ⅲ1 l ,∞ I e ∞2
… , ¨ “ tm1 l P
哪5
I p q
【
一
图 l 系 统 的 硬 件 组 态
通过 分 析斗 轮堆 取 料机 的 堆料 工艺 和 取 料工 艺 , 定 系统 的控制 方 案 , 计 一套 控 制 确 设 系统 。本 文 的创 新 点在 于采 用 了先 进 的现 场 总 线控 制 系统 , 过现 场 总线将 P C 变 频 器 通 L、 等 现场 装 置 连接 在 一起 , 现 了 P C控 制技 实 L 术、 变频 器调 速技 术 与检测 技术 的集 成 。 场 现 总线 构成 了该 控 制 系统 的基 本 框架 ,是 斗 轮 堆 取料 机控 制 系统 的核 心 部分 。通 过现 场 的 应 用结 果表 明该 现 场总 线 系统 提高 了作 业 效
控制 及 通信 系统 。 关 键词 : 式斗轮 堆 取料 机 ; L ; 场 总线 臂 P C现 中图分 类 号 :F2 . T 3 53 文 献标 识码 : A
前 言 臂式 斗轮 堆取 料 机是 在小 型斗 轮挖 掘 机
的基 础上 发展 起 来 的堆 、取合 一 的 轨道 式 散 料 专 用装 卸设 备 。 它具 有堆 取 能力 大 、 料场 占 地面 积小 、操 作 方便 等优 点 而 被工 业部 门广 泛使 用Ⅲ 。它 广泛 应 用于 火 力发 电 厂 、 工 化 轻 工 、 货 港 口等 的储料 厂 。 以研究 斗 轮堆 取 散 所 料 机 的控 制系 统 有着 重要 意义 。 1初 期 的臂式 斗 轮堆 取料 机控 制 系统 8 年 代初 期 ,L 、 器 和 软启 停 器 等 0 P C 变频 应用 于斗 轮机 控 制 系统 中 ,减少 了 继 电器 和 控制 电缆 , 斗轮 机取 料 的过 程 中 , 变 频 在 通过 调 速技 术 实现 了斗 轮 取料 机构 取 煤量 在 一 定 范 围内 的可调 ;实现 了大 车 的平 稳启 动 与 制 动 ,减 小 了启 动 与制 动过 程 中对 设备 的冲击 [1 2 斗 轮机 的 性能 得到 了提 高 。 2现场 总线 技术 根据 国际 电工 委 员 会 (E ) 美 国 仪 表 1C 和 协 会 ( A 的 定 义 : 场 总线 是 连 接 智 能现 场 I ) S 现 设 备 和 自动化 系统 的 数字 、 向传 输 、 分 支 双 多 结 构 的通 信 网络 ,它 的关 键标 志 是 能支 持 双 向多节 点 、 总线 式 的全 数 字通 讯 , 具有 可靠 性 高 、 干扰 能 力 强 、 信 速 率 快 、 护 成本 低 抗 通 维