汽车转弯制动过程中的制动力动态分配控制
什么是ABC、ABD、ABS
什么是DSC 什么是DSC
• DSC车身动态控制系统。 DSC车身动态控制系统。
BMW自主开发的DSC控制系统中集成了ASC自动稳定控 BMW自主开发的DSC控制系统中集成了ASC自动稳定控 制系统和牵引力控制系统,能够通过对出现滑转趋势的驱 动轮进行选择制动来控制驱动轮的滑转状态,从而相应地 对车辆起到稳定作用。而在冰雪路面、沙漠或砂砾路面上, 驾驶者只需按下一个按钮就可以使车辆进入DTC模式,从 驾驶者只需按下一个按钮就可以使车辆进入DTC模式,从 而增强车辆在上述路面上的牵引力。同时,由于DSC动态 而增强车辆在上述路面上的牵引力。同时,由于DSC动态 稳定控制系统的干预响应极限稍微延长,车辆的牵引力和 驱动力也随之增大,驾驶者能够享受到非同寻常的运动驾 驶体验。DSC动态稳定控制系统的另一个功能是CBC弯道 驶体验。DSC动态稳定控制系统的另一个功能是CBC弯道 制动控制系统,能够在转弯轻微制动时通过非对称的制动 力控制消除车辆转向过度趋势。
什么是DAC? 什么是DAC?
• DAC下坡行车辅助控制系统(Down-hill DAC下坡行车辅助控制系统(Down-
assist control)。 control)。 与发动机制动的道理相同,为了避免制动 系统负荷过大,减轻驾驶员负担,下山辅 助控制在分动器位于L位置;车速5 助控制在分动器位于L位置;车速5-25km /h并打开DAC开关的条件下,不踩加速踏 并打开DAC开关的条件下,不踩加速踏 板和制动踏板,下山辅助控制系统可以自 动把车速控制在适当水平。下山辅助控制 系统工作时停车灯会自动点亮。
什么是HDC? 什么是HDC?
• HDC坡道控制系统(Hill Descent Control)。 HDC坡道控制系统(Hill Control)。
ABS EBD CBC EBA BAS BA ASR TCS TRC ESP DSC VSC MSR EDS OBD分别是什么意思
ABS EBD CBC EBA BAS BA ASR TCS TRC ESP DSC VSC MSR EDS OBD分别是什么意思?1、ABS 防抱死制动系统2、EBD电子制动力分配3、EBA紧急制动辅助装置4、CBC转弯制动控制5、BAS制动力辅助系统6、BA 机械制动辅助系统7、ASR驱动(轮)防滑系统8、TCS循迹控制系统9、TRC牵引力控制系统Traction Control10、ESP 电控行驶平稳系统11、DSC动态稳定控制系统12、VSC电子稳定装置13、MSR发动机阻力矩控制14、EDS电子差速锁15、OBD车载自动诊断系统1、ABS Anti-lock Braking System是刹车防抱死系统.ABS工作时就相当于以很高的频率进行点刹,于是在紧急情况下踩制动踏板,肯定会感到制动踏板在颤动,同时也会听到制动总泵发出的“哒哒”声,这便是ABS在正常工作。
由于制动总泵在不断调整制动压力,从而对制动踏板有连续的反馈力。
因此,在这种情况下,一定要“坚定不移”地踩住制动踏板,同时采取积极措施避险。
2、EBD electric brakeforce dis-tribution是电子制动力分配系统.EBD用高速计算机在汽车制动的瞬间,分别对四只轮胎附着的不同地面进行感应、计算,得出不同的摩擦力数值,使四只轮胎的制动装置根据不同的情况用不同的方式和力量制动,并在运动中不断高速调整,从而保证车辆的平稳、安全。
当紧急刹车车轮抱死的情况下,EBD在ABS动作之前就已经平衡了每一个轮的有效地面抓地力,可以防止出现甩尾和侧移,并缩短汽车制动距离。
EBD实际上是ABS的辅助功能,它可以改善提高ABS的功效。
所以在安全指标上,汽车的性能又多了“ABS+EBD”。
3、EBA Electronic Brake Assist是电子控制煞车辅助,这个系统可以感应驾驶人对煞车踏板的作动需求程度, 当电脑从煞车踏板所侦测到的煞车动作, 来判断驾驶人此次煞车的意图, 如果是属於非常紧急、急迫的煞车, EBA此时将会指示煞车系统产生更高的油压使ABS发挥作用, 而使煞车力更快速的产生减少煞车距离, 电子控制煞车辅助系统尤其是对於脚力较差的妇女及高龄驾驶者, 在规避紧急危险的煞车时甚有帮助ESP是一种牵引力控制系统,与其他牵引力控制系统比较,ESP不但控制驱动轮,而且可控制从动轮。
机动车制动器的制动力分布与控制策略
机动车制动器的制动力分布与控制策略在现代道路交通中,安全是最重要的关键词之一。
机动车制动系统的有效性直接影响着车辆的制动距离和刹车性能,因此对于制动器的制动力分布和控制策略的研究至关重要。
本文将重点探讨机动车制动器的制动力分布和控制策略,并介绍一些当前的研究和发展趋势。
1. 机动车制动器的制动力分布机动车制动器的制动力分布是指将制动力分配给车辆的各个轮胎,以确保均衡和稳定的制动效果。
通常情况下,前轮负责50%至70%的制动力,后轮则负责剩余的30%至50%。
这样的分配能够确保在制动过程中车辆的稳定性,并防止车辆发生侧滑或失控。
然而,制动力分布不仅取决于车辆本身的设计和性能,还受到路况、驾驶方式和外部因素等多种因素的影响。
因此,制动力分布需要根据实际情况进行动态调整和控制。
一种常见的方法是通过使用传感器获取车辆的速度、转向角度和横向加速度等数据,然后根据这些数据来调整制动力的分配。
2. 机动车制动器的控制策略机动车制动器的控制策略是指通过控制制动器的工作方式和力度,来实现均衡的制动效果。
常见的控制策略包括防抱死制动系统(ABS)、电子稳定程序(ESP)和制动力分配系统(EBD)等。
ABS系统是一种通过调整制动压力来防止车轮抱死的控制策略。
当车辆进行紧急制动或遭遇低摩擦路面时,ABS系统会自动调整制动压力,使车轮在滚动和抱死之间保持动态平衡,从而提高制动效果和操控性能。
ESP系统是一种通过调整车辆的制动力和转向动力,来提供更高的稳定性和操控性能。
ESP系统通常与ABS系统结合使用,能够监测车辆的姿态和横向加速度,并根据这些数据对制动力和转向力进行实时调整,以避免车辆失控或侧滑。
EBD系统是一种通过调整前后轮制动力分配的控制策略。
根据车辆的负载和动态特性,EBD系统可以实时调整前后轮制动力的分配比例,以确保制动过程中的稳定和平衡。
这种系统能够提高车辆的制动性能和操控性能,减少制动距离和侧滑。
3. 研究和发展趋势随着科技的不断发展,机动车制动器的制动力分布和控制策略也在不断改进和创新。
ABS 、TCS、 EBD、 ESP 是什么
ABS 、TCS、EBD、ESP 是什么!80年代是ABS,90年代是牵引力控制装置,现在则是ESP车辆稳定电控系统。
由于它是ABS和TCS两种系统功能的延伸,因此,ESP称得上是当前汽车防滑装置的最高级形式。
面对诸多字母缩写的安全配置,什么ABS、TCS、EBD、ESP您能搞明白吗?谁又是个中高手呢?它们的作用是什么?您在买车时该看重哪一条呢?下面我们给你逐一道来。
据德国保险业协会、汽车安全学会分析导致严重伤亡交通事故的原因后的研究显示,60%的死亡交通事故是由于侧面撞车引起的,30%~40%是由于超速行驶、突然转向或操作不当引发的。
而装备ABS、TCS、EBD、ESP等电子装备的汽车,对驾驶操作的危险感应灵敏度可以超过世界上最优秀的赛车手。
一辆汽车行驶在路滑的左弯道上,当过度转向开始使得车子向右甩尾时,ESP电子稳定系统的传感器感觉到了滑动,就迅速让右前轮制动,使汽车产生顺时针方向的转矩,而将汽车保持在原来的车道内;当不足转向使前轮驶离路面而丧失对地面的附着力时,四通道的ESP 就让左后轮制动,由此产生逆时针方向的转矩使汽车回到正确路线上(如果车上装的是双通道的ESP,则会使左前轮制动)。
如果后轮驱动的汽车控制不住其后轮,ESP可同时降低发动机的功率和通过精确计算得出压力来控制车轮,使汽车保持它的正常运行轨迹。
当然,ESP无法对抗物理学定律,如果汽车跑得太快,在某些情况下仍可能出事故。
ABS刹车防抱死系统ABS是Anti-LockBrakeSystem的英文缩写,即“刹车防抱死系统”。
目前除个别微型车、面包车外,大部分国产车几乎都装备有ABS,只是装置本身的档次、差异问题。
1978年博世公司研制并生产出世界上第一套ABS防抱死系统,为汽车的安全行驶又解决了一道难题。
在没有ABS时,如果紧急刹车一般会使轮胎抱死,由于抱死之后轮胎与地面是处于滑动摩擦状态。
ABS装置始终使车轮与地面之间保持接近滑动又未滑动状态,它们之间的摩擦是静摩擦,所以ABS会使刹车的距离变短。
汽车制动力分配调节装置结构与原理

终止相应气缸的燃油供给会对催化 转换器造成严重损害,因此目前在
(*0 系 统 中 通常利 用控 制节气 门开 度和点火提前角的方式来调节发动 机的输出扭矩,从而实现对驱动车 轮 的 驱 动 力 矩 的调 节 。
在 (*0 中 ,为确 定 驱 动 车 轮 是 否滑转,可利用 ()*中 的车轮转速 传 感 器获 得车 轮的 转 速信 号。 (*0 电 子 控 制 装 置 既 可 以 是 独 立 的 ,也
在 汽车 驱动 过程中,()* - (*0 电 控系统 根据 各
车轮转 速传感器产生的转速信号, 确定驱动车轮的滑移率和汽车的参 考速度,当判定驱动车轮的滑移率 超过设定限值时,即驱动副节气门 的步进电机转动,减小节气门的开 度 。 此时 ,即 使主 节气 门开 度 不变 , 发动机的进气量也会因副节气门开 度 减小而 减少, 使输出 扭矩减 小,驱 动车轮的驱动力矩随之降低。若滑 移率仍 未降低到设定的控 制范围 内,()*-(*0 系 统将控制 (*0制动 压力调节装置和 ()* 制动 压力调节 装置,对驱动车轮施加一定的制动
汽车防滑控制系统最初只是在 制 动过程 中防止 车轮 被制动 抱死, 避免车轮在路面上作 纯滑移,提高 汽车在制动过程中的 方向稳定性和 转 向 操 纵 能 力 ,缩短 制 动 距 离 ,因 此 被 称 为 制 动 防 抱 死 系 统( ’+,-./012 (342 5 )67,58),简 称 ’()。 但 由 于 对 汽 车 性 能 要 求 的 不 断 提高 , 防 滑 控 制 系 统 的 功 能 进 一 步 得到 完 善 和
亮。
( 下 转 第 !3 页 )
汽车 维修 #$$%&’
!"
汽车系统字母代号解释
汽车系统字母代号解释1、ABS 防抱死制动系统2、EBD电子制动力分配3、EBA紧急制动辅助装置4、CBC转弯制动控制5、BAS制动力辅助系统6、BA 机械制动辅助系统7、ASR驱动(轮)防滑系统8、TCS循迹控制系统9、TRC牵引力控制系统Traction Control10、ESP 电控行驶平稳系统11、DSC动态稳定控制系统12、VSC电子稳定装置13、MSR发动机阻力矩控制14、EDS电子差速锁15、OBD车载自动诊断系统16、HUD抬头数字显示Heads Up Display1、ABS是刹车防抱死系统.ABS工作时就相当于以很高的频率进行点刹,于是在紧急情况下踩制动踏板,肯定会感到制动踏板在颤动,同时也会听到制动总泵发出的“哒哒”声,这便是ABS在正常工作。
由于制动总泵在不断调整制动压力,从而对制动踏板有连续的反馈力。
因此,在这种情况下,一定要“坚定不移”地踩住制动踏板,同时采取积极措施避险。
2、EBD是电子制动力分配系统.EBD用高速计算机在汽车制动的瞬间,分别对四只轮胎附着的不同地面进行感应、计算,得出不同的摩擦力数值,使四只轮胎的制动装置根据不同的情况用不同的方式和力量制动,并在运动中不断高速调整,从而保证车辆的平稳、安全。
当紧急刹车车轮抱死的情况下,EBD在ABS动作之前就已经平衡了每一个轮的有效地面抓地力,可以防止出现甩尾和侧移,并缩短汽车制动距离。
EBD实际上是ABS的辅助功能,它可以改善提高ABS的功效。
所以在安全指标上,汽车的性能又多了“ABS+EBD”。
3、EBA是电子控制煞车辅助, 这个系统可以感应驾驶人对煞车踏板的作动需求程度, 当电脑从煞车踏板所侦测到的煞车动作, 来判断驾驶人此次煞车的意图, 如果是属於非常紧急、急迫的煞车, EBA此时将会指示煞车系统产生更高的油压使ABS发挥作用, 而使煞车力更快速的产生减少煞车距离, 电子控制煞车辅助系统尤其是对於脚力较差的妇女及高龄驾驶者, 在规避紧急危险的煞车时甚有帮助。
解读汽车配置含义EBD、EBA、DSC、CBC、HDC、EDS、EBV、ABS
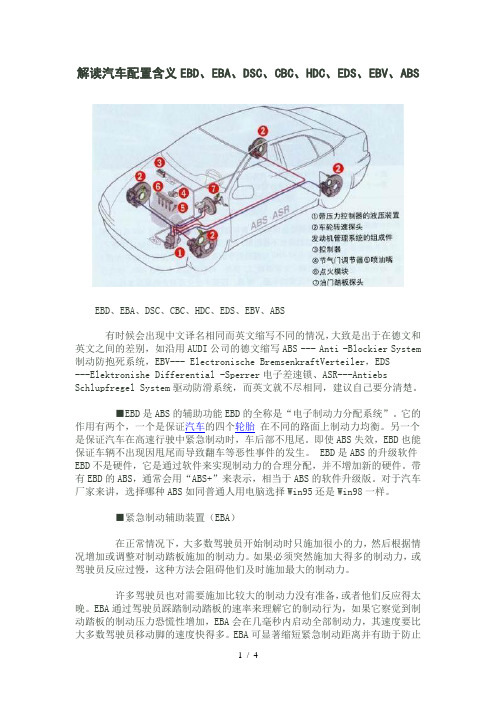
解读汽车配置含义EBD、EBA、DSC、CBC、HDC、EDS、EBV、ABSEBD、EBA、DSC、CBC、HDC、EDS、EBV、ABS有时候会出现中文译名相同而英文缩写不同的情况,大致是出于在德文和英文之间的差别,如沿用AUDI公司的德文缩写ABS --- Anti -Blockier System 制动防抱死系统,EBV--- Electronische BremsenkraftVerteiler,EDS---Elektronishe Differential -Sperrer电子差速锁、ASR---Antiebs Schlupfregel System驱动防滑系统,而英文就不尽相同,建议自己要分清楚。
■EBD是ABS的辅助功能EBD的全称是“电子制动力分配系统”。
它的作用有两个,一个是保证汽车的四个轮胎在不同的路面上制动力均衡。
另一个是保证汽车在高速行驶中紧急制动时,车后部不甩尾。
即使ABS失效,EBD也能保证车辆不出现因甩尾而导致翻车等恶性事件的发生。
EBD是ABS的升级软件EBD不是硬件,它是通过软件来实现制动力的合理分配,并不增加新的硬件。
带有EBD的ABS,通常会用“ABS+”来表示,相当于ABS的软件升级版。
对于汽车厂家来讲,选择哪种ABS如同普通人用电脑选择Win95还是Win98一样。
■紧急制动辅助装置(EBA)在正常情况下,大多数驾驶员开始制动时只施加很小的力,然后根据情况增加或调整对制动踏板施加的制动力。
如果必须突然施加大得多的制动力,或驾驶员反应过慢,这种方法会阻碍他们及时施加最大的制动力。
许多驾驶员也对需要施加比较大的制动力没有准备,或者他们反应得太晚。
EBA通过驾驶员踩踏制动踏板的速率来理解它的制动行为,如果它察觉到制动踏板的制动压力恐慌性增加,EBA会在几毫秒内启动全部制动力,其速度要比大多数驾驶员移动脚的速度快得多。
EBA可显著缩短紧急制动距离并有助于防止在停停走走的交通中发生追尾事故。
ABS EBD CBC EBA BAS BA ASR TCS TRC ESP DSC VSC MSR EDS OBD分别是什么意思?

1、ABS 防抱死制动系统2、EBD电子制动力分配3、EBA紧急制动辅助装置4、CBC转弯制动控制5、BAS制动力辅助系统6、BA 机械制动辅助系统7、ASR驱动(轮)防滑系统8、TCS循迹控制系统9、TRC牵引力控制系统Traction Control10、ESP 电控行驶平稳系统11、DSC动态稳定控制系统12、VSC电子稳定装置13、MSR发动机阻力矩控制14、EDS电子差速锁15、VSA车辆稳定性控制系统16、OBD车载自动诊断系统1、ABS是刹车防抱死系统.ABS工作时就相当于以很高的频率进行点刹,于是在紧急情况下踩制动踏板,肯定会感到制动踏板在颤动,同时也会听到制动总泵发出的“哒哒”声,这便是ABS在正常工作。
由于制动总泵在不断调整制动压力,从而对制动踏板有连续的反馈力。
因此,在这种情况下,一定要“坚定不移”地踩住制动踏板,同时采取积极措施避险。
2、EBD是电子制动力分配系统.EBD用高速计算机在汽车制动的瞬间,分别对四只轮胎附着的不同地面进行感应、计算,得出不同的摩擦力数值,使四只轮胎的制动装置根据不同的情况用不同的方式和力量制动,并在运动中不断高速调整,从而保证车辆的平稳、安全。
当紧急刹车车轮抱死的情况下,EBD在ABS动作之前就已经平衡了每一个轮的有效地面抓地力,可以防止出现甩尾和侧移,并缩短汽车制动距离。
EBD实际上是ABS的辅助功能,它可以改善提高ABS的功效。
所以在安全指标上,汽车的性能又多了“ABS+EBD”。
3、EBA是电子控制煞车辅助,这个系统可以感应驾驶人对煞车踏板的作动需求程度, 当电脑从煞车踏板所侦测到的煞车动作, 来判断驾驶人此次煞车的意图, 如果是属於非常紧急、急迫的煞车, EBA此时将会指示煞车系统产生更高的油压使ABS发挥作用, 而使煞车力更快速的产生减少煞车距离, 电子控制煞车辅助系统尤其是对於脚力较差的妇女及高龄驾驶者, 在规避紧急危险的煞车时甚有帮助4、CBC转弯制动控制又称弯道自动控制(CBC)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
,!B
=
B fl
~
Bfr ·
"' r
=
1
~ +
0#S !
=
G(r S
)!,
(9 )
其中,# 为时间常数,S ;
~0
=
G(f 0 )=
a 12b f2 a 11a 22
~ ~
a 21b f1 a 12 a 21
·
(10 )
在理想状态下,由转向输入和左、右制动力分
配不同所引起的横摆率 "' ,同式(9 )计算得到的 "' r 值应该是一致的,所以得到
模拟条件是在一个开环的测试中进行·
5 模拟曲线及其分析
图3 ,图4 分别显示了常规制动系和带有制 动力动态分配控制的制动系的制动模拟结果·
图3 常规制动系 Fi 9 .3 Nor mal br aki n9 syst em
通过对图3 和图4 的对比,可以看出:采用转 向角前馈控制的制动力分配控制方法,提高了与
~
MO O"' ·
(14 )
1004
东北大学学报(自然科学版)
第25 卷
对式(13 ),式(14 )进行降阶处理,令!= 1 , y = 2,
[ 1
2 I
f f"
(f f
r
r )2
(f
2 f
] r
2 r
)
1
是有效的·
Tf 2I
!
,
[ 2
2 M
f" ( f
· 1·
r )2 ( f f
(15 )
] r r )1
( ) Cr = a r
~
Oy
~ L r!' OI
·
(4 )
式中,I Z 为车辆绕Z 轴的转动惯量,kg·m2 ;L f ,L r
为质心至前、后轴距离,m;Cf ,Cr 为前、后车轮的
收稿日期:2004- 02- 16 基金项目:国家自然科学基金资助项目(50275025 )·
作者简介:于 彦(1972 - ),女,辽宁大连人,东北大学博士研究生,大连海事大学讲师;谢里阳(1962 - ),男,黑龙江林口人,东北 大学教授,博士生导师·
1 所示·根据考虑问题的需要,将汽车简化为两自 由度系统 横摆运动和横向运动·并建立如下运 动坐标系:汽车静止时,悬挂质量质心为坐标原点
0 ,将过 0 点的水平面与汽车纵向对称面交线为 I 轴,前进方向为正;同一水平面内,与I 轴垂直的 轴线为y 轴;过 0 点垂直向上的轴线为Z 轴·
图1 两自由度三轮车辆系统模型 Fi g .1 A 3 wheel vehi cl e model of 2 degr ees of fr eedom
转向角前馈控制原则,对左、右车轮的制动力进行动态分配控制,使之在各种路况下均能满足制动
稳定性的要求·并且通过建立的两自由度三轮车辆模型,进行了计算机模拟·模拟结果显示采用转 向角前馈控制的制动力动态分配的方法,大大降低了在制动起作用时间内实际横摆率与理想横摆
率之间的差值,从而验证了该方法对提高车辆转弯制动过程中的操纵性和稳定性是有效的· 关 键 词:转向角;前馈控制;横摆率;制动力;动态分配
(16 )
4 模拟条件
(1 )制动初速:120 k m/h ; (2 )制动路面:干燥平坦柏油路; (3 )制动减速度:4 m/s2 ; (4 )制动输入方式:迅速脱离离合器,踩制动 踏板;制 动 作 用 执 行 0. 5 s 后,转 向 角 输 入 0. 7 rad ; (5 )制动液压:3. 5 MPa·
(7 )
G p(S
)=
S
2
~(a 11
b p1S ~ a 12b p1 + a 22 )S +(a 11a 22
~
a 12a 21 )·
(8 )
在计算标准横摆率"' r 的过程中,为了消除因 司机个体间的差异而造成的对汽车制动过程中操
纵性和稳定性的影响,假定与稳态横摆率有关的
转向输入 ~0 在制动和非制动过程中都是定值, 并且将过渡过程特征作为一阶延迟系统考虑,以
GP(S )!B
(6 )
式中,G(f S )表示与转向角有关的横摆率的传递
函数;Gp(S )表示与左、右车轮制动力分配有关的 横摆率的传递函数,且
G(f S
)=
S
2
b f1S +(a 12b f2 ~ a 22b f1 )
,
~(a 11 + a 22 )S +(a 11a 22 ~ a 12a 21 )
2(a
f
L
2 f
+
I ZO O
a
r
L
2 r
) ,
a 12
=
~
2(a f L f ~ I ZO O
a
r
L
r
) ,
a 21
=
~
2(a f L f ~ MO O
a
r
L
r
) ~
OO ,
a 22
=
~
2(a f + MO O
a
r
) ,b f1
=
2a f Lf IZ
,
b f2
=
2a f M
,b p1
=
Tf 2I Z
定,从等式(12 )可看出,作用在左、右车轮上的制
动力差值能用一个与转向输入有关的二阶/二阶
系统的传递函数表示· 综上所述转向角前馈控制原则,转向角前馈
控制系统框图如图2 所示·
2 转向角前馈控制原则
对式(5 )进行拉氏变换,会看到 "' 在每个输 入中都出现,且得到
"' =[1 0 ][SI ~ A ~1 ]BU = G(f S )!+
抵消与输入有关的横向振动的干扰,"' r 与转向角 有关,其传递函数用 G(r S )表示·
图2 转向角前馈控制系统图 Fi 9 .2 For war d-f eed contr ol syst em of st eeri n9 an9l e
3 控制系统的计算机模拟
由于式(12 )是由拉氏变换得来的传递函数, 属于频域的表示,不适用于计算机编程,因此要将
[4 ] 郭孔辉· 汽车 操 纵 动力 学[M]· 吉 林:吉 林 科 学 出 版 社,
1991 .102 -140· (Guo K ~. The control dyna mics of auto mobile[M]. Jili n : Jili n Scientific Press ,1991 .102 -140 . ) [5 ] Yasuno Y ,~i gashi mata A,Ito K . Vehicle dyna mics of and i ntegrated control syste m over f our Wheel steeri ng and braki ng perf or mance[J ]. JaPan Societ y of Auto moti e Engineers , 1992 ,46(3 ):13 -19 . [6 ] 于彦,谢里阳,何辉,等· 汽车转动惯量的测定[J ]· 东北大 学学报(自然科学版),2004 ,25(3 ):280 -282· (Yu Y,Xie L Y,~e ~,et al . Deter mi nati on of cars mo ment of i nertia[J ]. Journal of Nort heastern Uni ersit y(Nat ural Science ),2004 ,25(3 ):280 -282 . ) [7 ] Smit h D E ,Star key J M. Eff ects of model co mplexi ng on t he perf or mance of auto mated vehicle steeri ng controller : controller develop ment and eval uati on[J ]. Journal of Vehicls Syste m Dyna mics ,1994 ,23 :627 -645 . [8 ] Maalej A Y,Guent her D A,Ellis R . Experi mental develop ment of tyre f orce and moment models[J ]. I nt J of Vehicle Design ,1989 , 10(1 ):34 -51 . [9 ] 孙增析· 系统 分 析 与控 制[M]· 北 京:清 华 大 学 出 版 社,
依据上述建立的车辆模型和坐标系的选取,
建立车辆横摆运动和横向运动方程为
I Z! = 2(L f Cf ~ L r Cr )+ T2 (f Bfl ~ Bfr ),(1 )
பைடு நூலகம்
m(O' y + O I!' )= 2(Cf + Cr ), (2 )
( ) 且
Cf
=a f
"~
Oy
+ L f!' OI
,
(3 )
第10 期
于 彦等:汽车转弯制动过程中的制动力动态分配控制
1003
转弯力,N ;Tf 为前轮轮距,m;Bfl ,Bfr 为前轮左、 右车轮制动力,N ;m 为汽车质量,kg ;O O 为车辆
纵向速度,m/S ;O' y 为车辆侧向加速度,m/S2 ;! 为 车辆转向角,rad ;" 车辆横摆角,rad·
图4 带有转向角前馈控制的制动系 Fi 9 .4 Br aki n9 Syst em wi t h f or war d-f eed contr ol