永磁同步电机系统参数辨识与转矩波动抑制
永磁无刷直流电机转矩波动及其抑制的探讨

16
西 安 ห้องสมุดไป่ตู้ 通 大 学 学 报
第31卷
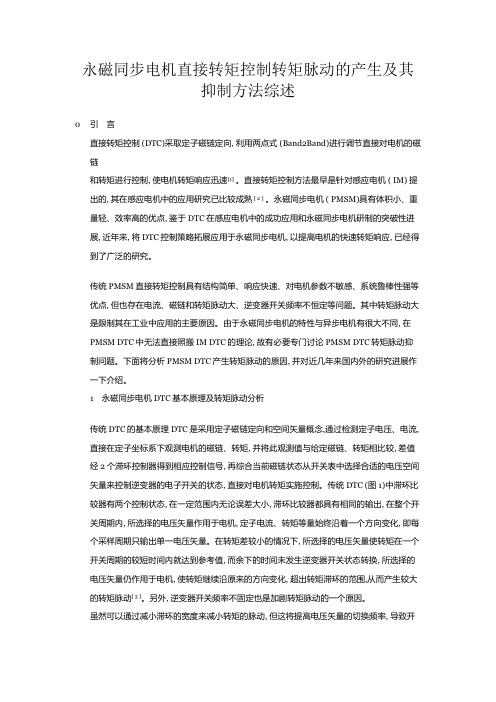
T em ( t) = 0. 412 5 + 0. 004co s30Ξt + …
( 10) ( ) 由式 10 可以计算出 n = 1 500 r m in、T = 3. 4 . kg cm 时优化电流后的转矩波动情况, 如图 6 所示
E1 E7 E 13 E5 E 11 E 17 E 23 E 29 E5 E 11 E 17 E 23 E 29 E 35 E1 E7 E 13 E 19 E 25 E7 E 13 + E 1 E 19 + E 5 E 25 E 31 E 37 E 11 E 17 E 23 E 11 E 17 + E 5 E 23 E 29 E 35 E 41 E1 E7 E 13 E 19 E 13 E 19 + E 7 E 25 + E 1 E 31 E 37 E 43 E5 E 11 E 17 E 17 E 23 + E 11 E 29 + E 7 E 35 E 41 E 47 E1 E7 E 13
第10期
刘 文等: 永磁无刷直流电机转矩波动及其抑制的探讨
13
顺序导通, 从而使定子电流尽可能与参考电流接近.
(a ) 电机的原理框图
(b ) 同步采样电流控制的原理框图
图1 永磁无刷直流电机驱动
1 转矩计算的公式推导及转矩波动的抑制
1. 1 转矩计算的公式推导
这里研究的是无中性线 Y 形连接的三相永磁同步电动机, 它代表了许多应用场合中的绝 大多数无刷直流电机. 为了简化计算, 作如下假设: ( 1) 电枢反应相对于励磁来说可以忽略; ( 2) 定子电流对称且无偶次谐波; ( 3) 定子绕组对称; ( 4) 转子磁场分布关于极轴对称; ( 5) 反馈电流和相应反电势的基波分量保持同相; ( 6) 不考虑凸极效应 . 无刷直流电机的电磁转矩可以看作是定子绕组中的电流与转子磁场相互作用而产生的, 根据假设条件, 采用永磁同步电动机的无刷直流电机的电磁转矩可以由定子相电流和转子反 电势表示为 ( 1) T em ( t) = [ ea ( t) ia ( t) + eb ( t) ib ( t) + ec ( t) ic ( t) ] W 式中 . W 为转子角速度 根据假设条件, A 相反电势可以表示为 ea ( t) = E 1 sin Ξt + E 3 sin3Ξt + E 5
永磁同步电机的参数辨识

=E/n〔4.4〕
其中,E为空载反电势,单位V;n为对应的转速,单位Krpnu
反电势系数其实就是转子永磁磁链,只是单位不同。永磁磁链的单位是Wb,其计算公式为屮广EJ3,E空载反电势,服位V;3为转子旋转机械角連度,单位是rad/so永磁磁链与反电势系数间的换算关系如下:
这里给出一个工程上计算PMSM的反电势系数的经验公式,此公式是根拥安川A1000的变频器经过多台永磁同步电机的实验结果并总结规律所得。
(4.6)
其中,P\•为电机额定功率(单位:W),川尸为极对数,人 为额定频率(单位:Hz),。为额定电流(单位:A), K为修正系数,収・对多家厂商生产的永磁同步电机 的参数进行了验证,利用式(4.6)计算出来的反电势系数与厂商给定的反电势系数的 误基基木维持在±15%以内,所以可以用式(4.6)的计算法代替上文提及的反电势系数 的辨识方法|44^h
永磁同步电机的参数辨识
本文主要是在通用变频器上虫现永毬同步氓机的矢星控制.对于通川变频器而言. 变频常所带的电机是未知的.不同的电机有不同的电机参数。由團23可知,蹩想便得 永磁同步电机欠量控制系统有较好的稳态运行暮性及动态响应特性,就需要电札参数糾 确可知"巾机带負载时的转动惯盘与转谏调节屣的円参数桔定密切相关.而电流调节 器卩】参教确实定需要电机的电枢电阻、交直牠电感、永磁件磁链等参数。国外学者復 卑就开始硏究永磁同步电机参数辨U啲方法,幷且直系统丿F始运行之前,系统可以白动 通过特定的算池对永醯阿步电机势数进厅辨识*然后对斃动豳的各控制参數进行自整 定,从而军需產丁程人员护对不同的电机而对飙动器相黃参数岗仃手动週蓟大大増锁 广驱动器的通用性…本章节主零介绍氷磁同步毘机电枇电Rs, dq轴电豚、永題体磁 链〔即反电势1系数〕的离线辨识tOff-line AutoTuning〕方法*
《2024年永磁同步电机的参数辨识及控制策略研究》范文

《永磁同步电机的参数辨识及控制策略研究》篇一一、引言随着现代工业的快速发展,电机作为重要的动力装置,其性能和效率直接影响到整个系统的运行。
永磁同步电机(PMSM)以其高效率、高功率密度和高转矩控制精度等优点,在许多领域得到了广泛的应用。
然而,要充分发挥其性能,需要对电机的参数进行准确的辨识,并制定合适的控制策略。
本文旨在研究永磁同步电机的参数辨识方法以及有效的控制策略,以实现对电机的高效控制和优化。
二、永磁同步电机参数辨识1. 参数辨识的重要性永磁同步电机的性能取决于其参数的准确性。
包括电阻、电感、反电动势等在内的电机参数,对电机的运行状态和效率具有重要影响。
因此,对电机参数进行准确的辨识,是实现电机高效控制的基础。
2. 参数辨识方法(1)基于离线测量的方法:通过在电机不工作或低速运行时进行测量,获取电机的参数。
这种方法简单易行,但需要额外的测量设备和操作步骤。
(2)基于在线辨识的方法:通过实时监测电机的运行状态,利用电机的数学模型进行参数辨识。
这种方法无需额外设备,可以实时更新参数,但计算量较大。
本文采用基于在线辨识的方法,通过分析电机的运行数据,实时更新电机参数。
三、永磁同步电机控制策略研究1. 传统控制策略传统的永磁同步电机控制策略主要包括矢量控制和直接转矩控制等。
这些控制策略可以实现对电机的精确控制,但在某些情况下,如电机参数变化或负载波动时,控制效果可能受到影响。
2. 现代控制策略(1)滑模控制:滑模控制可以有效地处理系统的不确定性和外界干扰,对电机的速度和位置进行精确控制。
本文将滑模控制应用于永磁同步电机的控制中,取得了良好的效果。
(2)自适应控制:自适应控制可以根据系统的运行状态和参数变化,自动调整控制策略,以保持系统的最优性能。
本文研究了自适应控制在永磁同步电机中的应用,提高了电机的运行效率和稳定性。
四、实验与结果分析为了验证所提控制策略的有效性,本文进行了大量的实验。
实验结果表明,采用滑模控制和自适应控制的永磁同步电机,在速度和位置控制方面具有较高的精度和稳定性。
永磁同步电机直接转矩控制转矩脉动的抑制方法以及产生综述
永磁同步电机直接转矩控制转矩脉动的产生及其抑制方法综述0引言直接转矩控制 (DTC)采取定子磁链定向, 利用两点式 (Band2Band)进行调节直接对电机的磁链和转矩进行控制, 使电机转矩响应迅速[1]。
直接转矩控制方法最早是针对感应电机 ( IM) 提出的, 其在感应电机中的应用研究已比较成熟 [ 2 ]。
永磁同步电机 ( PMSM)具有体积小、重量轻、效率高的优点, 鉴于 DTC在感应电机中的成功应用和永磁同步电机研制的突破性进展, 近年来, 将 DTC控制策略拓展应用于永磁同步电机, 以提高电机的快速转矩响应, 已经得到了广泛的研究。
传统PMSM直接转矩控制具有结构简单、响应快速、对电机参数不敏感、系统鲁棒性强等优点, 但也存在电流、磁链和转矩脉动大、逆变器开关频率不恒定等问题。
其中转矩脉动大是限制其在工业中应用的主要原因。
由于永磁同步电机的特性与异步电机有很大不同, 在PMSM DTC中无法直接照搬 IM DTC的理论, 故有必要专门讨论 PMSM DTC转矩脉动抑制问题。
下面将分析 PMSM DTC产生转矩脉动的原因, 并对近几年来国内外的研究进展作一下介绍。
1永磁同步电机 DTC基本原理及转矩脉动分析传统 DTC的基本原理DTC是采用定子磁链定向和空间矢量概念,通过检测定子电压、电流, 直接在定子坐标系下观测电机的磁链、转矩, 并将此观测值与给定磁链、转矩相比较, 差值经 2个滞环控制器得到相应控制信号, 再综合当前磁链状态从开关表中选择合适的电压空间矢量来控制逆变器的电子开关的状态, 直接对电机转矩实施控制。
传统 DTC (图 1)中滞环比较器有两个控制状态, 在一定范围内无论误差大小, 滞环比较器都具有相同的输出, 在整个开关周期内, 所选择的电压矢量作用于电机, 定子电流、转矩等量始终沿着一个方向变化, 即每个采样周期只输出单一电压矢量。
在转矩差较小的情况下, 所选择的电压矢量使转矩在一个开关周期的较短时间内就达到参考值, 而余下的时间未发生逆变器开关状态转换, 所选择的电压矢量仍作用于电机, 使转矩继续沿原来的方向变化, 超出转矩滞环的范围,从而产生较大的转矩脉动[ 3 ]。
永磁同步电机的参数辨识及控制策略研究

永磁同步电机的参数辨识及控制策略研究永磁同步电机的参数辨识及控制策略研究摘要:本文主要研究了永磁同步电机(Permanent Magnet Synchronous Motor,PMSM)的参数辨识和控制策略。
首先,介绍了PMSM的基本原理和特点,包括结构、工作原理以及在工业应用中的优势。
然后,详细讨论了PMSM的参数辨识方法,包括利用电流响应模型和转矩-电流模型进行参数辨识的理论和实践,并对辨识结果进行分析和评价。
接下来,针对辨识得到的参数,提出了一种基于磁链反馈的控制策略,包括速度闭环控制和电流控制,通过实验验证了该控制策略的有效性和可行性。
最后,总结了本文的研究内容,指出了进一步研究的方向和重要性。
关键词:永磁同步电机,参数辨识,控制策略,磁链反馈 1. 引言永磁同步电机是一种采用永磁体作为励磁源的同步电动机,由于其高效率、高功率密度、高转矩性能以及无需外界励磁等优点,在工业应用中得到越来越广泛的应用。
然而,PMSM的性能和效果很大程度上依赖于其控制策略和参数辨识的准确性。
因此,如何准确辨识PMSM的参数,并设计出有效的控制策略成为了研究的重点。
2. PMSM的参数辨识方法2.1 电流响应模型辨识方法电流响应模型辨识方法是一种常用的PMSM参数辨识方法,其基本思想是利用系统的电流响应特性来辨识其参数。
具体而言,通过施加阶跃电压,测量电路中的电流响应曲线,并利用曲线拟合算法得到PMSM的相关参数。
该方法具有辨识过程简单、实验装置简便的优点,但在实际应用中受到噪音、谐波干扰等因素的影响,辨识结果不够精确。
2.2 转矩-电流模型辨识方法转矩-电流模型辨识方法是另一种常用的PMSM参数辨识方法,其基本思想是通过测量PMSM在不同电磁转矩下的电流来辨识其参数。
具体而言,通过施加不同转矩和电压,测量电流曲线,并利用曲线拟合算法来计算得到PMSM的相关参数。
该方法相对于电流响应模型辨识方法具有更高的精确性和准确性,但其实验过程较为复杂,需要较高的实验设备和技术要求。
《2024年永磁同步电机的参数辨识及控制策略研究》范文

《永磁同步电机的参数辨识及控制策略研究》篇一一、引言随着电力电子技术的飞速发展,永磁同步电机(PMSM)作为高效、节能的电机驱动系统,在工业、交通、航空航天等领域得到了广泛应用。
然而,永磁同步电机的性能和效率受到其参数辨识和控制策略的深刻影响。
因此,对永磁同步电机的参数辨识及控制策略进行研究,对于提高电机性能、优化系统运行具有重要意义。
二、永磁同步电机参数辨识1. 参数辨识的重要性永磁同步电机的性能和运行状态受到其参数的影响,如电感、电阻、永磁体磁链等。
准确的参数辨识对于电机的控制、优化设计以及故障诊断具有重要意义。
2. 参数辨识方法(1)传统方法:通过电机设计参数和实验测试获得,但受环境、温度等因素影响较大。
(2)现代方法:利用现代信号处理技术和智能算法,如最小二乘法、卡尔曼滤波器、神经网络等,对电机运行过程中的数据进行实时辨识和更新。
3. 参数辨识的挑战与解决方案在参数辨识过程中,如何提高辨识精度、降低辨识误差、适应不同工况是主要挑战。
针对这些问题,可以通过优化算法、提高采样精度、引入多源信息融合等方法进行解决。
三、永磁同步电机的控制策略研究1. 控制策略的种类与特点永磁同步电机的控制策略主要包括矢量控制、直接转矩控制、模型预测控制等。
矢量控制具有高精度、高动态响应的特点;直接转矩控制具有转矩响应快、控制简单的优点;模型预测控制则具有较好的鲁棒性和适应性。
2. 控制策略的优化与改进针对不同应用场景和需求,可以对控制策略进行优化和改进。
例如,通过引入智能算法,如模糊控制、神经网络控制等,提高电机的自适应性和鲁棒性;通过优化算法参数,提高电机的能效和运行效率。
3. 控制策略的挑战与未来方向在控制策略研究中,如何提高系统的稳定性和可靠性、降低能耗是主要挑战。
未来研究方向包括:深度学习在永磁同步电机控制中的应用、多源信息融合在电机控制中的研究等。
四、实验与分析通过搭建永磁同步电机实验平台,对上述参数辨识及控制策略进行研究与验证。
基于改进预测控制的永磁同步电机转矩波动抑制策略

摘要永磁同步电机传统单矢量预测转矩控制在一个控制周期内仅作用一组开关状态,且两电平逆变器可提供的离散电压矢量的数量有限,这使得系统稳态运行时转矩的控制精度不高。
传统加入占空比调制的双矢量预测转矩控制策略虽然相比于单矢量预测转矩控制策略可以在一定程度上降低转矩波动,但是由于可选择的作用矢量的方向固定,转矩波动仍较大,且需要对占空比进行在线计算。
针对永磁同步电机传统单矢量和双矢量预测转矩控制中转矩波动较大的问题,本文分别从改变开关时刻和利用广义双矢量扩展有限控制集的角度展开研究。
本文首先针对传统单矢量预测转矩控制策略中由于逆变器开关时刻固定在控制周期开始或结束时刻,从而导致较大转矩波动的问题,提出将开关时刻平移至控制周期内部,并设计基于变开关点的合成矢量集合,根据期望电压矢量空间位置,从集合中直接确定出备选电压矢量及占空比,再通过价值函数筛选出作用矢量,实现永磁同步电机变开关点预测转矩控制。
同时在变开关点预测转矩控制中对开关时刻进行平移,不会增加每个控制周期内开关状态的切换次数,所以不会引起较高的开关频率。
针对传统加入占空比调制的双矢量预测转矩控制策略中,因可选择的作用矢量的方向固定导致转矩波动仍较大,且需要对占空比进行在线计算等问题。
本文利用广义双矢量对有限控制集进行扩展,提出一种无需在线计算占空比的永磁同步电机双矢量预测转矩控制策略,该策略从扩展有限控制集的角度出发,使一个控制周期作用一个由两个基本矢量组合作用生成的合成矢量,来达到提高电机稳态控制精度、降低转矩波动的目的。
同时通过离线构造包含占空比信息的备选电压矢量表,避免了占空比的在线计算。
最后在两电平电压源逆变器馈电的永磁同步电机控制系统实验平台上对以上本文提出的两种控制策略进行实验研究。
分别在不同工况下对本文提出的两种控制策略进行实验验证。
关键词:永磁同步电机,转矩波动,预测转矩控制,电压矢量,变开关点,占空比调制ABSTRACTPermanent magnet synchronous motor traditional single-vector predictive torque control only acts one set of switching states in each control period. Because of the limited number of discrete voltage vectors that the two-level inverter can provide, the system torque control accuracy is relatively low. The traditional dual-vector predictive torque control with duty ratio modulation can reduce the torque ripple to a certain extent compared with tsingle-vector predictive torque control. However, due to the fixed direction of the selected action vectors, there is still a large torque ripple, and the duty ratio needs to be calculated online. In order to solve the problem of large torque ripple in traditional single-vector and dual-vector predictive torque control of PMSM, this paper focuses on changing the switch time and expanding the finite control set with generalized dual- vector.In the traditional single-vector predictive torque control strategy, the inverter switching time is fixed at the beginning or end of the control period, which leads to large torque ripple. This paper proposes to shift the switching time to the inside of the control period. By designing a set of synthetic vectors based on variable switching points, the candidate voltage vector and duty ratio are directly determined according to the distribution characteristics of all synthetic vectors in the set and the spatial positional relationship of the desired voltage vector. Then the action vector can be selected by value function to realize the variable switching point predictive torque control(VSP-PTC) of PMSM. Besides, the VSP-PTC just shifts the switching time, and will not increase the switching times of the switching state in each control period, so it will not cause a higher switching frequency.In the traditional dual-vector predictive torque control with duty ratio modulation, the direction of the selected action vector is fixed, resulting in large torque ripple. Besides, the duty ratio needs to be calculated online. In this paper, the generalized dual-vector is used to extend the finite control set, and a dual-vector predictive torque control strategy without online duty ratio calculation for PMSM is proposed. From the perspective of the extended finite control set, a synthetic vector is generated by the combination of two basic vectors is acted on one control period. The aim is toimprove the accuracy of motor steady state control and reduce the torque ripple. At the same time, an alternative voltage vector table containing duty ratio information is constructed off-line to avoid on-line calculation.Finally, the two control strategies proposed in this paper are experimentally studied on the experimental platform of PMSM control system fed by two-level voltage source inverter. The validity and feasibility of the two control strategies proposed in this paper are verified under different conditions.KEY WORDS: Permanent magnet synchronous motor, Torque ripple, Predicitive torque control, V oltage vectors, Variable switch point, Duty ratio modulationIV目录第1章绪论 (1)1.1课题研究背景及意义 (1)1.2永磁同步电机转矩控制策略研究现状 (3)1.2.1永磁同步电机直接转矩控制策略 (4)1.2.2永磁同步电机预测转矩控制策略 (5)1.3本文主要研究内容 (7)第2章永磁同步电机传统预测转矩控制 (9)2.1两电平电压源逆变器馈电的永磁同步电机系统数学模型 (9)2.1.1 永磁同步电机数学模型 (9)2.1.2两电平电压源逆变器模型 (11)2.2单矢量预测转矩控制策略 (13)2.2.1永磁同步电机预测模型 (13)2.2.2单矢量预测转矩控制的结构组成 (14)2.3加入占空比调制的双矢量预测转矩控制策略 (15)2.3.1占空比调节机制分析 (15)2.3.2加入占空比调制的双矢量预测转矩控制流程 (18)2.4永磁同步电机传统预测转矩控制仿真分析 (20)2.5本章小结 (23)第3章永磁同步电机变开关点预测转矩控制 (25)3.1开关点对转矩波动的影响 (25)3.2永磁同步电机变开关点预测转矩控制策略 (27)3.2.1基于变开关点控制的合成矢量集 (27)3.2.2期望电压矢量位置角计算 (29)3.2.3基于变开关点控制的备选电压矢量的确定 (32)3.2.4永磁同步电机变开关点预测转矩控制策略的实现 (35)3.3实验结果及分析 (36)3.3.1实验系统介绍 (36)3.3.2 低速轻载工况下实验 (38)V3.3.3 中速半载工况下实验 (40)3.3.4 满载工况下实验 (41)3.3.5 动态特性实验 (43)3.4本章小结 (45)第4章无需占空比在线计算的永磁同步电机双矢量预测转矩控制 (47)4.1永磁同步电机双矢量预测模型 (47)4.2备选电压矢量表的建立 (48)4.2.1基于广义双矢量的合成矢量集 (48)4.2.2期望电压矢量计算 (49)4.2.3包含占空比信息的备选电压矢量表的建立 (50)4.3控制策略的实现 (53)4.4实验结果及分析 (54)4.4.1低速轻载工况下实验 (54)4.4.2中速半载工况下实验 (56)4.4.3满载工况下实验 (58)4.4.4 动态特性实验 (60)4.5本章小结 (62)第5章总结与展望 (63)参考文献 (65)发表论文和参加科研情况说明 (71)致谢 (73)VI第1章绪论第1章绪论1.1 课题研究背景及意义随着我国工业水平的不断进步和国民经济的持续增长,我国的年发电量不断提高,早已突破4.2万亿千瓦时,成为世界第一。
《2024年永磁同步电机的参数辨识及控制策略研究》范文
《永磁同步电机的参数辨识及控制策略研究》篇一一、引言随着电力电子技术和控制理论的不断发展,永磁同步电机(PMSM)在工业、交通、医疗等领域的应用越来越广泛。
为了更好地实现PMSM的高效、精确控制,对其参数辨识及控制策略的研究显得尤为重要。
本文将重点研究永磁同步电机的参数辨识方法以及控制策略,为实际应用提供理论依据。
二、永磁同步电机的基本原理永磁同步电机是一种基于磁场原理进行工作的电机。
其工作原理是通过电机内部的定子和转子之间的磁场相互作用,使转子跟随定子的磁场变化而转动。
为了更好地理解和分析其工作原理,需要了解电机的相关参数,如电感、电阻、磁通量等。
三、永磁同步电机的参数辨识参数辨识是研究PMSM的基础。
电机的参数决定了其运行性能和控制策略的有效性。
本文将详细研究永磁同步电机的参数辨识方法。
(一)电阻和电感的辨识电阻和电感是电机的基本参数,可以通过实验测量得到。
在实际应用中,常采用矢量控制法对电机进行建模,通过测量电机的电压和电流来计算电阻和电感。
(二)磁通量的辨识磁通量是电机运行的重要参数,可以通过磁通测量仪或通过电压、电流间接计算得到。
磁通量的准确性直接影响电机的运行性能和控制效果。
为了提高磁通量的测量精度,可以采用先进的算法对测量数据进行处理。
四、永磁同步电机的控制策略控制策略是决定PMSM运行性能的关键因素。
本文将研究几种常见的控制策略,并探讨其优缺点。
(一)矢量控制策略矢量控制是PMSM常用的控制策略之一。
它通过将电机的电流分解为直轴和交轴分量,实现对电机转矩的精确控制。
然而,矢量控制策略对参数的准确性要求较高,否则可能导致控制效果不佳。
(二)直接转矩控制策略直接转矩控制策略是一种基于空间矢量的控制方法,具有较高的转矩响应速度和鲁棒性。
该策略通过对电机定子电压和电流的直接控制,实现对电机转矩的快速调整。
然而,直接转矩控制策略对电机参数的依赖性较小,因此在实际应用中具有一定的优势。
(三)模糊控制策略模糊控制是一种基于模糊逻辑的控制方法,具有较好的适应性和鲁棒性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
永磁同步电机系统参数辨识与转矩波动抑制永磁同步电机具有功率密度大、运行效率高、动态响应快等诸多优点,被广泛用于航空航天、船舶推进、轨道交通、精密仪器等高端装备制造业。
电机系统中的电机模型参数误差以及包括电机转子磁链谐波、齿槽转矩、变流器死区效应和电流采样误差在内的各种周期性扰动会降低系统的动态和稳态性能,限制永磁同步电机在高性能场合的应用。
本文旨在提升永磁同步电机的控制性能,针对电机模型参数误差和各种周期性扰动的影响,分别进行了参数辨识和转矩波动抑制的研究。
针对逆变器死区效应等非线性特性造成的电机参数在线辨识误差问题,通过建立死区效应引起的逆变器扰动电压数学模型,提出了考虑扰动电压的永磁同步电机参数在线辨识策略。
针对在线辨识过程中因忽略电流谐波而引起扰动电压辨识误差的问题,提出了两种扰动电压在线辨识的改进措施。
一种针对引起辨识误差的来源,在电流环采用迭代学习控制器来抑制电流谐波;另一种则利用电压模型的平均值方程来辨识扰动电压,使辨识结果免受电流谐波的影响。
在不依赖任何电机或逆变器参数的前提下,提高了扰动电压的辨识精度,并最终提高了电机参数的辨识精度。
将在线辨识策略与预测电流控制相结合,利用参数辨识结果调节控制器参数,消除了预测电流控制的稳态误差,改善了系统的稳态性能。
针对逆变器非线性特性造成的电机参数静态辨识误差问题,通过建立电机静止状态下的逆变器扰动电压数学模型,提出了考虑扰动电压的永磁同步电机参数静态辨识策略。
通过选择合适的电压激励,在既不需要任何模型参数,也不需要增加堵转装置等设备的前提下,有效排除了扰动电压的影响,提高了参数辨识精度。
将静态辨识策略引入传统矢量控制,用于整定控制器参数,有效提升了传统矢量控制的起动性能。
针对周期性扰动造成的永磁同步电机转矩波动问题,提出了基于参数自适应迭代学习控制的转矩波动抑制策略。
依据奈奎斯特稳定判据推导出迭代学习控制器参数的可行域,解决系统的稳定性问题;同时构建控制器参数的自适应机制,依据自适应率在可行域内对控制器参数进行在线调节,解决迭代学习控制下系统动态性能下降的问题。
研究结果表明,本文提出的参数自适应迭代学习控制策略在电机稳态运行时有效抑制了转矩波动,并且相比于固定参数的迭代学习控制策略,缩短了系统动态响应调节时
间,改善了系统的动态性能。