四杆机构构件的受力分析和强度
哈工大(威海)机械原理知识点整理

哈工大(威海)《机械原理》知识点整理整理人:131310405郭勇辰第一章1.机械是机器与机构的总称。
2.机器是一种人为实物组合的具有确定机械运动的装置,用来完成有用功、转换能量或处理信息,以代替或减轻人类的劳动。
3.现代化机器具有四个组成部分:原动机、传动机、执行机构和控制系统。
4.一部机器通常包含一个或若干个机构。
机构是一个具有相对机械运动的构件系统,或称它是用来传递与变换运动和动力的可动装置。
第二章1.构件与零件的区别在于:构件是运动的单元,而零件是制造的单元。
一个构件既可以是一个零件,也可以是由若干零件装配而成的刚性体。
2.运动副:两构件间的直接接触又能产生一定相对运动的活动连接成为运动副。
3.一个运动副引入的约束数目最多只能是5个,最少是1个。
4.运动链:若干构件通过运动副连接而成的构件系统称为运动链。
运动链中各构件首位封闭,则称为闭式链,否则为开式链。
5.机构:如果将运动链中的一个构件固定作为参考坐标系,则这种运动链称为机构。
6.运动副的分类:把引入1个约束的运动副称为Ⅰ级副,以此类推;以面接触的运动副称为低副,以点或线接触的运动副称为高副;如果两运动副元素间只能相互做平面平行运动,则称之为平面运动副,否则为空间运动副;7.不按比例绘制的运动简图成为机构示意图。
8.机构运动简图的单位为m/mm(图纸上1mm所代表的真实长度)。
9.自由度:确定一个构件或机构的运动(或位置)所需的独立参数的数目。
10.机构具有确定运动的条件是:机构的自由度大于零,且机构的原动件数目等于机构的自由度数。
11.计算自由度时注意三种情况:复合铰链、局部自由度、虚约束。
12.复合铰链:由两个以上构件在同一处构成的重合转动副。
13.局部自由度:不影响整个机构运动的自由度。
14. 虚约束:起重复限制作用的约束。
(虚约束的几种情况在P17)15. 三维空间中,一个活动构件具有6个自由度。
16. 任何机构都包含机架、原动件和从动件系统三个部分。
液压支架四连杆机构设计及运动学分析
01 引言
03 参考内容
目录
02 机构设计
引言
液压支架是煤矿井下综采工作面的重要设备之一,用于支撑顶板和护帮,以 保证作业安全。四连杆机构是液压支架的重要组成部分,对支架的支撑力和稳定 性有着重要影响。本次演示将介绍液压支架四连杆机构的设计及运动学分析,旨 在为优化支架性能提供理论支持。
在仿生机器人的研究领域中,四足仿生马机器人是一种非常经典的案例。四 足动物,尤其是马,具有非常优异的运动性能和适应能力,因此模仿其运动特征 的机器人具有广泛的应用前景。本次演示将介绍一种凸轮连杆组合机构驱动的四 足仿生马机器人的构型设计与运动学建模分析。
该仿生马机器人主要由凸轮连杆组合机构、驱动装置和四肢关节等组成。其 中,凸轮连杆组合机构是机器人的核心组成部分,其作用是模拟马腿部的运动特 征,包括马腿的伸展和收缩。驱动装置则是控制凸轮连杆组合机构运动的关键部 件,其作用是提供动力,使机器人可以自主运动。四肢关节则是连接凸轮连杆组 合机构和驱动装置的枢纽,其作用是传递运动和动力。
1、降低摩擦损失:减少活塞、连杆和曲轴之间的摩擦是提高内燃机效率的 重要途径。我们可以采用低摩擦材料和润滑技术来降低摩擦损失。
2、优化结构布局:通过改变活塞、连杆和曲轴的结构布局,可以改善力的 传递路径,提高机构的稳定性和效率。例如,可以改变活塞形状、连杆长度和曲 轴半径等参数来优化结构布局。
3、精确控制燃烧过程:燃烧过程是内燃机工作的核心过程之一。通过精确 控制燃烧过程,可以优化燃烧效率,减少废气排放。例如,可以通过精确控制燃 油喷射、点火时间和进气流量等参数来优化燃烧过程。
4、优化冷却系统:内燃机的冷却系统对于保证其正常运行和延长使用寿命 具有重要意义。通过优化冷却系统的设计,可以降低内燃机的温度,减少热损失, 提高效率。例如,可以通过优化散热器、冷却风扇和循环管道等部件的设计来优 化冷却系统。
机械原理之四杆机构受力分析PPT课件
第21页/共30页
FR32= - FR12= FR21
3).取构件3为分离体——其上作用有:FR23、 FR43、 M3
由力平衡条件得: FR43= - FR23= FR21
M3 = FR23L´
C
FR23
3
L
M3
ω1 1 D
FR43
第22页/共30页
例 如图所示为一曲柄滑块机构,设各构件的尺寸(包括转动副的半径)已知,各
式中
xI, yI——力作用点I的坐标, xK, yK——取矩点K的坐标。
第16页/共30页
4) 各构件的力平衡方程式
•对于构件1分别根据
•对于构件2有
•对于构件3有
可得
第17页/共30页
以上共列出九个方程式,故可解出上述各运动副反力和平衡力的九个力 的未知要素。又因为以上九式为一线性方程组,因此可按构件1、2、3上待 定的未知力Mb, R41x, R41y, R12x, R12y, R23x, R23y, R34x, R34y的次序整理成以下的 矩阵形式:
3求rc取构件3为分离体并取该构件上的诸力对d点取矩规定力矩的方向逆时针者为正顺时针者为负则于是得同理取构件2为分离体并取诸力对b点取矩则因此可得3求rd根据构件3上的诸力平衡条件4求rb根据构件2上的诸力平衡条件5求ra同理根据构件1的平衡条件得至此机构的受力分析进行完毕
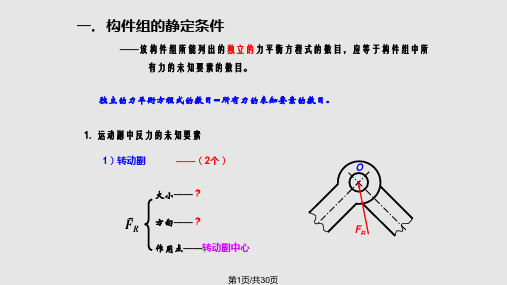
一. 构件组的静定条件
——该构件组所能列出的独立的力平衡方程式的数目,应等于构件组中所 有力的未知要素的数目。
A
ω23
C
FR32
3
M3
4D
解:1).求构件2所受的两力FR12、FR32的方位。
2).取曲柄1为分离体——其上作用有:
四连杆受力分析

四连杆受力分析不计摩擦时机构的受力分析根据机构所受已知外力(包括惯性力)来确定个运动副中的反力和需加于该机构上的平衡力。
由于运动副反力对机构来说是内力,必须将机构分解为若干个杆组,然后依次分析。
平衡力(矩)一一与作用于机构构件上的已知外力和惯性力相平衡的未知外力(矩)相平衡的未知外力(矩)已知生产阻力平衡力(矩)一一求解保证原动件按预定运动规律运动时所需要的驱动力(矩)已知驱动力(矩)平衡力(矩)一一求解机构所能克服的生产阻力一.构件组的静定条件——该构件组所能列出的独立的力平衡方程式的数目.§3-4不计摩擦时机构的受力分析根据机构所受已知外力(包括惯性力〉来确定个运动副中的反力和需加于该机构上的平衡力匕由于运动副反力对机构来说是内力*必须将机构分解为若干个杆组,然后依次分析中> + «力*1——占作用于机鋼构件上的已相平飯的未甘外力(E)己知生产阻力平衡力(矩)——求解保证原动件按预定运动规律运动时所需要的驱动力(矩)已知驱动力(矩)| A平衡力(矩)——求解机构所能克服的牛产阻力-构件组的静定条件——轨构件谢所能列岀的m氏的力平術方fiSftftS.10等于构件组中两有力的未知要責的81目"豪亘的力罕对扌程丸的救耳=所韦帶的来知要索的itq。
t运动樹中反力曲未知里秦n转动副——(2个)-丸小---- ?{方為—?作用点卡动副中心2 •构件fin*定条件设某构件组共有沖个构件*几个低副、几个高副>f构件可以列出§个独立的力平鎮方程,科个构件共有為个力平衡方程>一个平面低副引入2个力的未知数,円个低副共引入2円个力的未知数>—个平面高副引入1个力的未知数,几个低副共引入几个力的未知数而当构件组仅有低副时,则为『3归耳绘冷;羞專杆粗那满足鼻直条件二.用图解法作机构的动态静力分析步骤:1)对机构进行运动分析*求出个构件的住及其质心的吗$2)求出各构件的惯性力,并把它们视为外力加于构件上*3)根据静定条件将机构分解为若干个构件组和平衡力作用的构件:4)对机构进行力分析,从有已知力的构件开始,对各构件组进行力分析;5)对平衡力作用的构件作力分析。
机械原理课件之四杆机构受力分析
通过解方程,求解出各个连杆的受力大小和方向。
四杆机构受力分析的案例研究
案例1
案例2
分析一台工业机械中的四杆机构, 确定各个连杆的受力情况。
在一个机器人手臂中应用四杆机 构,研究其受力和应力分析。
案例3
通过受力分析,优化四杆机构的 设计,提高其工作效率。
结论和总结
四杆机构受力分析是机械工程领域的重要研究方向之一。它不仅可以帮助我 们了解四杆机构的工作原理,还可以指导我们设计更优秀的机械系统。
四杆机构的组成和基本结构
连杆
四杆机构由四根连杆组成,包括两个边连杆和两个角连杆。
铰链
连杆通过铰链连接,使得四杆机构能够实现运动。
驱动装置
驱动装置为四杆机构提供动力,使其能够完成特定任务。
四杆机构的运动分析
1
自由度
四杆机构的自由度取决于连杆的个数和铰链的类型。
2
运动类型
四杆机构可以实现旋转、平动和复杂的运动。
3
工作轨迹
通过对四杆机构的运动分析,可以得到工作轨迹的方程。
四杆机构受力分析的基本原理
四杆机构受力分析的基本原理是根据静力学的原理,通过分析力的平衡条件 来确定各个连杆的受力情况。
四杆机构受力分析的方法和步骤1 建立坐标系确定来自适的坐标系,便于受力分析的计算。
2 列写平衡方程
根据力的平衡条件,列写各个连杆的受力方程。
机械原理课件之四杆机构 受力分析
这篇课件将详细介绍四杆机构的受力分析。从概述四杆机构的基本原理开始, 到运动分析和受力分析的具体方法,最后通过案例研究加深理解。让我们一 起来探索吧!
四杆机构的概述
四杆机构是一种常见的机械连杆机构,由四根连杆组成。它具有简单的结构 和广泛的应用领域,是研究机械原理的重要组成部分。
四连杆机构

W d W r W f
通常用 来表示机械对能量的利用程度
Wr
W d W
f
W
1
f
1
Wd Wd
Wd
用功率表示的机械效率
Pr 1 P f Pd Pd
机械效率也可以用力或力矩的表达式表示 一机械传动如图。设Fd为驱动力,Fr为生产阻力,
d 和 r分别为在Fd和Fr的作用
B
EB
C
EC
大小
l ?
1 AB
?
PC
?
方向 ? AB BE
CD EC
后一个方程只有两个未知 数,可用图解法求解
过b点作EB 的方向线
be BE 过c点作
EC 的方向线 ce CE
两线交于e点
矢量 pe 代表 E
其大小为
E
pe
将矢量pc移到c点处则可见bccbec大小方向ab矢量pe代表其大小为后一个方程只有两个未知数可用图解法求解eb的方向线ec的方向线cecebc式中有两个未知数可用矢量图解法求解选定加速度比例尺ab可以代表从b作矢量ab指向与1一致则矢量作为的方向线与代表acb大小分别为将它们平移到机构图中的c点处可得bc逆时针方向cd大小方向ec如图c所示过b点作eb矢量代表aec大小分别为矢量422组成移动副的两构件瞬时重合点的速度加速度分析已知条件
角加速度 3
1.速度分析
(1)求vB2 构件1和2在B点组成转动副,vB2 vB1 1 lAB
方向垂直于AB,指向与1 的方向相同。
(2)求 vB3 构件2和构件3组成移动副,B2与B3为瞬时重合
点,B3点的绝对速度等于点B2的绝对速度和B3
连杆受力分析完整版

连杆受力分析
HEN system office room 【HEN16H-HENS2AHENS8Q8-HENH1688】
四连杆受力分析
不计摩擦时机构的受力分析根据机构所受已知外力(包括惯性力)来
确定个运动副中的反力和需加于该机构上的平衡力。
由于运动副反力
对机构来说是内力,必须将机构分解为若干个杆组,然后依次分析。
?平衡力(矩)——与作用于机构构件上的已知外力和
惯性力相平衡的未知外力(矩)相平衡的未知外力(矩)已
知生产阻力平衡力(矩)——求解保证原动件按预定运动规律运动时所需要的驱动力(矩)已知驱动力(矩)平衡力(矩)——求解机构所能克服的生产阻力一. 构件组的静定条件——该构件组所能列出的
独立的力平衡方程式的数目.。
四连杆机构原理 受力
四连杆机构原理受力四连杆机构是一种常用的机械传动装置,由四个连杆组成,可以实现复杂的运动轨迹。
在四连杆机构中,各个连杆之间的受力关系是非常重要的,它直接影响到机构的运动特性和稳定性。
我们来看一下四连杆机构中各个连杆的受力情况。
四连杆机构由一个固定连杆、两个活动连杆和一个驱动连杆组成。
固定连杆连接固定点和驱动点,活动连杆连接驱动点和工作点,驱动连杆连接工作点和固定点。
在四连杆机构中,驱动连杆是通过驱动点的力来产生运动的,而活动连杆则转化这个运动,并将其传递给工作点。
在四连杆机构中,各个连杆之间的受力关系是相互影响的。
首先,固定连杆在连接点处受到驱动点的力,这个力可以分解为水平方向和垂直方向的分力。
水平方向的分力使固定连杆产生水平方向的拉力,垂直方向的分力使固定连杆产生垂直向上的压力。
这些受力使得固定连杆保持稳定,并且不会发生位移。
接下来,活动连杆在连接点处同样受到驱动点的力。
这个力可以分解为水平方向和垂直方向的分力。
水平方向的分力使活动连杆产生水平方向的拉力,垂直方向的分力使活动连杆产生垂直向上的压力。
这些受力使得活动连杆具有一定的刚度,并且可以传递驱动点的力给工作点。
驱动连杆在连接点处同样受到驱动点的力。
这个力可以分解为水平方向和垂直方向的分力。
水平方向的分力使驱动连杆产生水平方向的拉力,垂直方向的分力使驱动连杆产生垂直向上的压力。
这些受力使得驱动连杆能够将驱动点的力传递给工作点,并且实现机构的运动。
四连杆机构中各个连杆之间的受力关系是非常重要的。
固定连杆、活动连杆和驱动连杆都承受着来自驱动点的力,这些力使得连杆产生拉力和压力,并且保持机构的稳定性和运动特性。
在实际应用中,我们需要根据具体情况来选择合适的连杆长度和连接方式,以确保机构的可靠性和性能。
四连杆机构中各个连杆之间的受力关系是非常重要的。
了解这些受力关系可以帮助我们更好地设计和应用四连杆机构,实现所需的运动轨迹和功能。
同时,我们还需要注意机构的稳定性和可靠性,确保机构在工作过程中不会出现失效和故障。