NP型内齿棘轮扳手的设计计算
棘轮的基本参数和计算公式
棘轮的基本参数和计算公式棘轮是一种常见的机械传动元件,常用于将旋转运动转化为直线运动或逆转。
它由一组齿轮组成,其中一个被称为“主轮”或“棘齿轮”,另一个被称为“从轮”或“棘齿”。
棘轮的参数主要涉及到齿数、模数、压力角等,下面将详细介绍。
一、基本参数:1.齿数(Z):棘轮的齿数是指主轮和从轮的齿数之和。
2.模数(m):棘轮的模数是指齿轮齿数与其分度圆直径之比。
模数常用于设计棘轮的齿数、齿宽和模数系列的选择。
3.压力角(α):棘轮的压力角是指主轮和从轮齿轮齿面与法线之间的夹角。
压力角的选择主要取决于传动的承载能力和传动效率。
4.螺旋角(θ):螺旋角是指棘轮的齿面螺旋线与其轴线之间的夹角。
螺旋角的选择主要取决于传动的平稳性和噪声要求。
二、计算公式:1.主轮齿数(Z1)和从轮齿数(Z2)之间的关系:Z1=Z-Z22.主轮分度圆直径(D1)和从轮分度圆直径(D2)之间的关系:D1=m*Z1D2=m*Z23.主轮螺旋角(θ1)和从轮螺旋角(θ2)之间的关系:θ1 = tan^-1[(tanα) / (cosα - (Z1 / Z2))]θ2 = tan^-1[(tanα) / (cosα - (Z2 / Z1))]4.主轮齿宽(b1)和从轮齿宽(b2)之间的关系:b1 = b / cosθ1b2 = b / cosθ25.主轮螺旋线的半径(r1)和从轮螺旋线的半径(r2)之间的关系:r1 = (D1 / 2) / cosθ1r2 = (D2 / 2) / cosθ2其中,b为齿轮的齿宽。
这些公式可以帮助我们计算和设计棘轮的各项参数。
需要注意的是,棘轮的选择和设计应根据具体应用需求,包括承载能力、传动效率、平稳性和噪声要求等综合考虑。
棘爪装置强度计算
棘爪装置强度计算1.按齿受弯曲校核棘轮模数m ≥3][75.1n m n Z M σψ m=t/π=1300×12÷360=43.3mm (式中:t —周节,π—圆周率)M n =F 支×(D+d )÷2=600×(690+43)÷2=219900Nm (式中:F 支—支持负载,D —卷筒底径,d —钢丝直径)m=43.3≥3][75.1n m n Z M σψ=5.58033021990075.13=⨯⨯mm 式中:Z —棘轮齿数,Z=30;Ψm =齿宽系数,Ψm =3(查《机械设计手册》表8-6-23);[σn ]—棘轮齿材料的许用弯曲应力,[σn ]=80MPa 。
2.按齿受挤压校核棘轮模数m ≥8.12303302199002][2=⨯⨯⨯=P Z M m n ψmm (式中:[P]—许用单位线压力,[P]=30MPa ) 从计算可见,棘轮强度符合设计要求。
3.棘爪的强度计算σn =M n ÷W+P ÷F ≤[σn ]P=2×M n ÷D=2×219900×103÷1300=3.38×105(N )(式中D 为棘轮直径)M n =P ×e=3.38×105×0.8×10-3=270(Nmm )(式中e 为偏心距,e=0.8mm )F=b ×δ=90×40=3600mm 2(式中b 为棘爪宽度和棘爪危险断面的厚度)W=b ×δ2÷6=90×402÷6=24000mm 3代入上式:σn =M n ÷W+P ÷F=270×103÷24000+3.38×105÷3600=105MPa ≤[σn ]=120MPa式中:[σn ]—棘爪材料许用弯曲应力,[σn ]=120MPa 。
NP型内齿棘轮扳手的设计计算
太大 ,但当 z 值过小时 , 会导致棘爪不能换向 , 为便于拉刀的分
度 ,以提高棘轮的分度精度 ,一般常选择能够除尽 360°的整数 ,
如 20 ,24 ,25 ,30 ,32 ,36 ,40 ,45 ,48 ,50 ,60 ,72 等 。
(2) 棘爪齿数的选择 。
棘爪的齿数 z G越多 ,扳手的承载能力越大 。或者说 ,扳手的
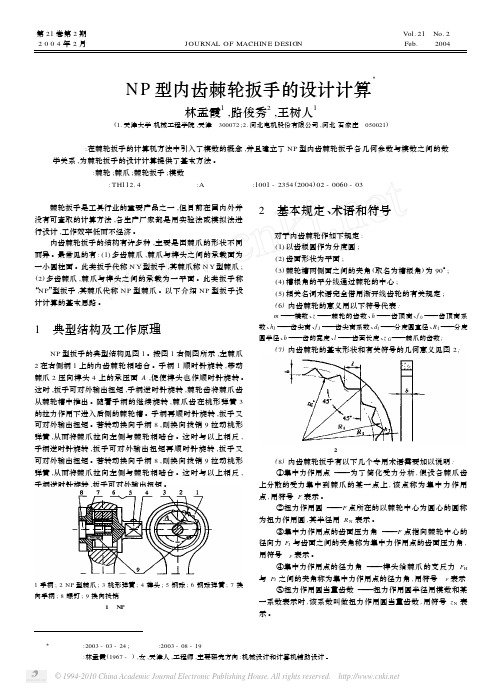
棘轮扳手是工具行业的重要产品之一 ,但目前在国内外并 没有可查取的计算方法 ,各生产厂家都是用实验法或模拟法进 行设计 ,工作效率低而不经济 。
内齿棘轮扳手的结构有许多种 ,主要是因棘爪的形状不同 而异 。最常见的有 : (1) 多齿棘爪 ,棘爪与榫头之间的承载面为 一小圆柱面 。此类扳手代称 N Y 型扳手 ,其棘爪称 N Y 型棘爪 ; (2) 多齿棘爪 ,棘爪与榫头之间的承载为一平面 。此类扳手称 “N P”型扳手 ,其棘爪代称 N P 型棘爪 。以下介绍 N P 型扳手设 计计算的基本思路 。
l。
5 强度计算
5. 1 齿面抗压强度计算 扳手的切向力 FQ 与扭力作用圆半径 RN 的乘积应等于扳
手的输出扭矩 Mo ,即 :
FQ = Mo / R N
图 2 内齿棘轮基本形状 (8) 内齿棘轮扳手有以下几个专用术语需要加以说明 : ①集中力作用点 ———为了简化受力分析 , 假设各棘爪齿 上分散的受力集中到棘爪的某一点上 , 该点称为集中力作用 点 ,用符号 F 表示 。 ②扭力作用圆 ———F 点所在的以棘轮中心为圆心的圆称 为扭力作用圆 ,其半径用 RN 表示 。 ③集中力作用点的齿面压力角 ———F 点指向棘轮中心的 径向力 FJ 与齿面之间的夹角称为集中力作用点的齿面压力角 , 用符号 αF 表示 。 ④集中力作用点的径力角 ———榫头给棘爪的支反力 FH 与 FJ 之间的夹角称为集中力作用点的径力角 ,用符号 γF 表示 ⑤扭力作用圆当量齿数 ———扭力作用圆半径用模数和某 一系数表示时 , 该系数叫做扭力作用圆当量齿数 , 用符号 zN 表 示。
棘轮型手动压机设计
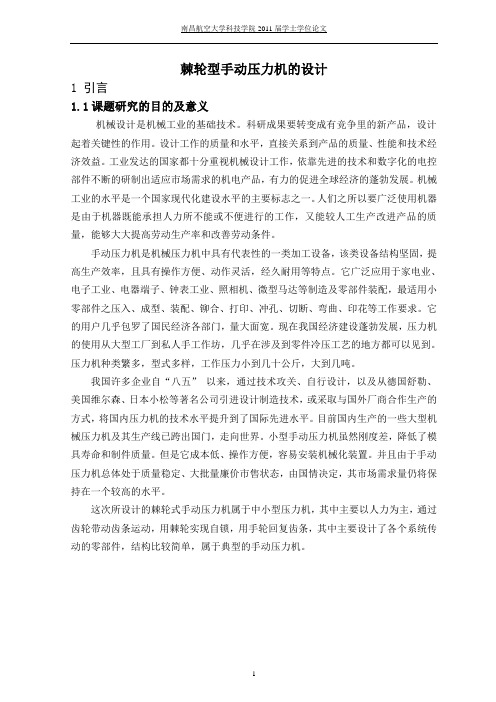
棘轮型手动压力机的设计1 引言1.1课题研究的目的及意义机械设计是机械工业的基础技术。
科研成果要转变成有竞争里的新产品,设计起着关键性的作用。
设计工作的质量和水平,直接关系到产品的质量、性能和技术经济效益。
工业发达的国家都十分重视机械设计工作,依靠先进的技术和数字化的电控部件不断的研制出适应市场需求的机电产品,有力的促进全球经济的蓬勃发展。
机械工业的水平是一个国家现代化建设水平的主要标志之一。
人们之所以要广泛使用机器是由于机器既能承担人力所不能或不便进行的工作,又能较人工生产改进产品的质量,能够大大提高劳动生产率和改善劳动条件。
手动压力机是机械压力机中具有代表性的一类加工设备,该类设备结构坚固,提高生产效率,且具有操作方便、动作灵活,经久耐用等特点。
它广泛应用于家电业、电子工业、电器端子、钟表工业、照相机、微型马达等制造及零部件装配,最适用小零部件之压入、成型、装配、铆合、打印、冲孔、切断、弯曲、印花等工作要求。
它的用户几乎包罗了国民经济各部门,量大面宽。
现在我国经济建设蓬勃发展,压力机的使用从大型工厂到私人手工作坊,几乎在涉及到零件冷压工艺的地方都可以见到。
压力机种类繁多,型式多样,工作压力小到几十公斤,大到几吨。
我国许多企业自“八五” 以来,通过技术攻关、自行设计,以及从德国舒勒、美国维尔森、日本小松等著名公司引进设计制造技术,或采取与国外厂商合作生产的方式,将国内压力机的技术水平提升到了国际先进水平。
目前国内生产的一些大型机械压力机及其生产线已跨出国门,走向世界。
小型手动压力机虽然刚度差,降低了模具寿命和制件质量。
但是它成本低、操作方便,容易安装机械化装置。
并且由于手动压力机总体处于质量稳定、大批量廉价市售状态,由国情决定,其市场需求量仍将保持在一个较高的水平。
这次所设计的棘轮式手动压力机属于中小型压力机,其中主要以人力为主,通过齿轮带动齿条运动,用棘轮实现自锁,用手轮回复齿条,其中主要设计了各个系统传动的零部件,结构比较简单,属于典型的手动压力机。
机械手手部的设计计算
机械手手部的设计计算1.1 手部设计基本要求(1)应具有适当的夹紧力和驱动力。
应当考虑到在一定的夹紧力下,不同的传动机构所需的驱动力大小是不同的。
(2)手指应具有一定的张开范围,手指应该具有足够的开闭角度(手指从张开到闭合绕支点所转过的角度)γ∆,以便于抓取工件。
(3)要求结构紧凑、重量轻、效率高,在保证本身刚度、强度的前提下,尽可能使结构紧凑、重量轻,以利于减轻手臂的负载。
(4)应保证手抓的夹持精度。
1.2 典型的手部结构(1)回转型包括滑槽杠杆式和连杆杠杆式两种。
(2)移动型移动型即两手指相对支座作往复运动。
(3)平面平移型。
1.3 机械手手抓的设计计算1.1.1 选择手抓的类型及夹紧装置本设计是设计平动搬运机械手的设计,考虑到所要达到的原始参数:手抓张合角γ∆=060,夹取重量为60Kg。
常用的工业机械手手部,按握持工件的原理,分为夹持和吸附两大类。
吸附式常用于抓取工件表面平整、面积较大的板状物体,不适合用于本方案。
本设计机械手采用夹持式手指,夹持式机械手按运动形式可分为回转型和平移型。
平移型手指的张开闭合靠手指的平行移动,这种手指结构简单, 适于夹持平板方料, 且工件径向尺寸的变化不影响其轴心的位置, 其理论夹持误差零。
若采用典型的平移型手指, 驱动力需加在手指移动方向上,这样会使结构变得复杂且体积庞大。
显然是不合适的,因此不选择这种类型。
通过综合考虑,本设计选择二指回转型手抓,采用滑槽杠杆这种结构方式。
夹紧装置选择常开式夹紧装置,它在弹簧的作用下机械手手抓闭和,在压力油作用下,弹簧被压缩,从而机械手手指张开。
1.1.2 手抓的力学分析下面对其基本结构进行力学分析:滑槽杠杆 图1.1(a )为常见的滑槽杠杆式手部结构。
(a)(b)图1.1 滑槽杠杆式手部结构、受力分析1——手指 2——销轴 3——杠杆在杠杆3的作用下,销轴2向上的拉力为F ,并通过销轴中心O 点,两手指1的滑槽对销轴的反作用力为F 1和F 2,其力的方向垂直于滑槽的中心线1oo 和2oo 并指向o 点,交1F 和2F 的延长线于A 及B 。
齿轮各参数计算公式
齿轮各参数计算公式模数齿轮计算公式名称代号计算公式模数m m=p/n =d/z=da/(z+2)(d为分度圆直径,z为齿数)齿距P p= n m=t d/z齿数Z z=d/m=n d/p分度圆直径d d=mz=da-2m齿顶圆直径da da=m(z+2)=d+2m=p(z+2)/ n齿根圆直径df df=d-2.5m=m(z-2.5)=da-2h=da-4.5m齿顶咼ha ha=m=p/n齿根高hf hf=1.25m齿高h h=2.25m齿厚s s=p/2= n m/2中心距a a=(z1+z2)m/2=(d1+d2)/2跨测齿数k k=z/9+0.5公法线长度w w=m[2.9521(k-0.5)+0.014z]13-1什么是分度圆?标准齿轮的分度圆在什么位置上?13-2 一渐开线,其基圆半径r b= 40 mm ,试求此渐开线压力角:■ = 20°处的半径r和曲率半径p的大小。
13-3有一个标准渐开线直齿圆柱齿轮,测量其齿顶圆直径da = 106.40 mm ,齿数z=25,问是哪一种齿制的齿轮,基本参数是多少?13-4两个标准直齿圆柱齿轮,已测得齿数z i= 22、Z2= 98,小齿轮齿顶圆直径d ai= 240 mm ,大齿轮全齿高h=22.5 mm,试判断这两个齿轮能否正确啮合传动?13-5有一对正常齿制渐开线标准直齿圆柱齿轮,它们的齿数为Z1= 19、Z2= 81,模数m= 5 mm,压力角= 20°若将其安装成a'= 250 mm的齿轮传动,问能否实现无侧隙啮合?为什么?此时的顶隙(径向间隙)C是多少?13-6已知C6150车床主轴箱内一对外啮合标准直齿圆柱齿轮,其齿数Z1 = 21、Z2= 66,模数m = 3.5 mm ,压力角□= 20°正常齿。
试确定这对齿轮的传动比、分度圆直径、齿顶圆直径、全齿高、中心距、分度圆齿厚和分度圆齿槽宽。
13-7已知一标准渐开线直齿圆柱齿轮,其齿顶圆直径d ai= 77.5 mm,齿数z1=29。
棘轮机构的参数化设计
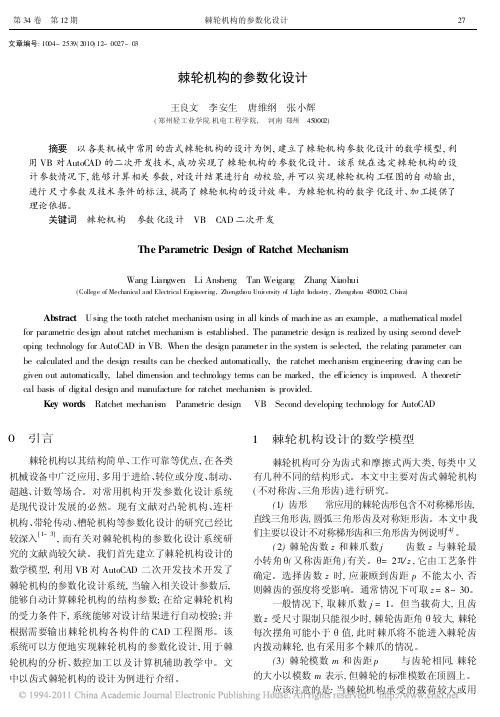
文章编号:1004-2539(2010)12-0027-03棘轮机构的参数化设计王良文 李安生 唐维纲 张小辉(郑州轻工业学院机电工程学院, 河南郑州 450002)摘要 以各类机械中常用的齿式棘轮机构的设计为例,建立了棘轮机构参数化设计的数学模型,利用VB对AutoC AD的二次开发技术,成功实现了棘轮机构的参数化设计。
该系统在选定棘轮机构的设计参数情况下,能够计算相关参数,对设计结果进行自动校验,并可以实现棘轮机构工程图的自动输出,进行尺寸参数及技术条件的标注,提高了棘轮机构的设计效率。
为棘轮机构的数字化设计、加工提供了理论依据。
关键词 棘轮机构 参数化设计 VB C AD二次开发The Parametric Design of Ratchet MechanismWang Liangwen Li Ansheng Tan Weigang Zhang Xiaohui(College of Mechanical and Electrical Engi neering,Zhengzhou Uni versity of Light Industry,Zhengz hou450002,Chi na)Abstract Using the tooth ratchet mechanism using in all kinds of machine as an example,a mathematical model for parametric design about ratchet mechanism is established.The parametric design is realized by using sec ond devel oping technology for AutoCAD in VB.W hen the design parameter in the syste m is selected,the relating parameter can be calculated and the design results can be checked automatically,the ratchet mechanism engineering dra wing can be given out automatically,label dimension and technology terms can be marked,the efficiency is improved.A theoreti cal basis of digital design and manufacture for ratchet mechanism is provided.Key words Ratchet mechanism Parametric design VB Second developing technology for AutoCAD0 引言棘轮机构以其结构简单、工作可靠等优点,在各类机械设备中广泛应用,多用于进给、转位或分度、制动、超越、计数等场合。
工程机械发动机构造与维修(第2版)习题及答案

第一章发动机总体构造1、发动机的基本术语有哪些?各有什么含义?(I)工作循环活塞在气缸内往比运动时,完成了进气、乐缩、作功和排气4个工作过程,周而兔始地进行这些过程,内燃机才能持续地运转对外输出功率,每完成一次上述4个过程称为一个工作循环。
(2)上止点(TDC)上止点是指活寒离曲轴回转中心最远处,通常指活寒的最高位置。
(3)卜止点(BDe)下止点是指活塞离曲轴回转中心最近处,通常指活塞的最低位置.(4)活塞行程(三)活塞行程是指上、下两止点间的距离,单位:亳米(mm)。
活塞由•个止点移到另一个止点,运动一次的过程称为行程。
(5)曲柄半径(R)曲柄半径是指与连杆大端相连接的曲柄销的中心线到曲轴回转中心线的距离(11rι),显然,曲轴每转一周,活塞移动两个行程,呻S=2R.(6)气缸工作容积(V h)气缸工作容积是指活塞从上止点到下止点所让出的空间的容积.其计算公式为V h=11I)2S∕4×IO6式中:K一—气缸工作容积,升(1.):D——气缸直径,花米(物):S——活塞面枳,平方亳米(mm?)。
(7)发动机工作容积(V t)发动机工作容积是指发动机所有气缸工作容枳的总和,也称发动机的扣量。
若发动机的气缸数为i,则V1=V11-i。
(8)燃烧室容积(VJ热烧室容积是指活寒在上止点时,活寤顶上面空间的容积,单位:升(1.),(9)气缸总容积(VJ气缸总容积是指活塞在下止点时,活塞顶上面空间的容积(1.).它等丁•气缸工作容积与燃烧窕容积之和,即V.=V h+工(10)压缩比(ε)压缩比是指气缸总容积与燃烧室容枳的比值,即e=V u∕V c=V h+V./V c=1.+V h/V t(11)工况内燃机在某一时刻的运行状况简称工况,以该时刻内燃机对外输出有效功率和转速来表示。
(12)负荷率内燃机在某一转速卜.发出的有效功率与相同转速卜所能发出的最大有效功率的比值称为负荷率,简称负荷。
2、发动机总体结构包括哪几部分?各起什么作用?(1)曲柄连杆机构。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
图$ " #型棘爪受力分析
( ) + ( ) . ( ) / ( ) ,
+- % $ ’ #,%
/ % !- % +-
棘爪共受"个力: 一是作用线通过棘轮中心 3$ 的径向力, 表示; 二是与扭力作用圆相切的切向力, 用符号-8 表 用符号! 示; 三是与 、 用 -8 两力的合力大小相等方向相反的支反力, ! 这三个力的矢量和等于零, 它们的数值关系是: 符号 -6 表示。
% & & ’年 %月
林孟霞, 等: 1 =型内齿棘轮扳手的设计计算
. $
"
基本公式
$ " #% &
/ % !#% $ #
( ) $ ( ) % ( ) " ( ) ’
/
’ %( & & ( ! !( & !&
$% % " " * ( !% / ( ’ ( ) * $ " + )*$ ) ") % , &
棘轮扳手是工具行业的重要产品之一, 但目前在国内外并 没有可查取的计算方法, 各生产厂家都是用实验法或模拟法进 行设计, 工作效率低而不经济。 内齿棘轮扳手的结构有许多种, 主要是因棘爪的形状不同 而异。最常见的有: ( ) 多齿棘爪, 棘爪与榫头之间的承载面为 # 一小圆柱面。此类扳手代称 ! 其棘爪称 ! 0 型扳手, 0 型棘爪; ( ) 多齿棘爪, 棘爪与榫头之间的承载为一平面。此类扳手称 $ “! ” 型扳手, 其棘爪代称 ! " " 型棘爪。以下介绍 ! " 型扳手设 计计算的基本思路。
! " 型内齿棘轮扳手的设计计算
林孟霞#, 路俊秀$, 王树人#
!
( 天津大学 机械工程学院, 天津 & ; 河北电机股份有限公司, 河北 石家庄 ’ ) # % ’ ’ ’ ( $ $ % ) ’ ’ $ #
摘要: 在棘轮扳手的计算机方法中引入了模数的概念, 并且建立了 ! "型内齿棘轮扳手各几何参数与模数之间的数 学关系, 为棘轮扳手的设计计算提供了基本方法。 关键词: 棘轮; 棘爪; 棘轮扳手; 模数 中图分类号: * + # # $ % , 文献标识码: 文章编号: ( ) # ’ ’ # . $ & ) , $ ’ ’ , ’ $ . ’ ’ / ’ . ’ &
第$ #卷第$期 $ ’’, 年 $ 月
机
械
设
计
4 7 8 9 ! :7 ;< = + > ! ?@ ? A > 6 !
B C D % $ # ! C % $ ; E F % $ ’ ’ ,
" " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " "
( ) 内齿棘轮的基本形状和有关符号的几何意义见图$ ; (
图$
内齿棘轮基本形状
( ) 内齿棘轮扳手有以下几个专用术语需要加以说明: 1 — — 为了简化受力分析, 假设各棘爪齿 ! 集中力作用点 — 上分散的受力集中到棘爪的某一点上, 该点称为集中力作用 点, 用符号 * 表示。 — —* 点所在的以棘轮中心为圆心的圆称 " 扭力作用圆 — 为扭力作用圆, 其半径用 ’! 表示。 — —* 点指向棘轮中心的 # 集中力作用点的齿面压力角 — 径向力* 与齿面之间的夹角称为集中力作用点的齿面压力角, 4 用符号! * 表示。
/
-
( ) $ /
’ ( !% ! !*! #% & !
(!!,!# ) / ( / ) / %% & % %% & !1 % " "1 !," / / ) / ( % % "1 % !1 &% " !," / + & ! ),0 ) " - %’
% $% / ] ( [!# #% !! !2 3 4 ( $ , & ) ") " ,!% %& # !*% / % % $ % / / ( [ ’," " " " 3 4 ( $ , & ) ")] #% ! !*"
# 典型结构及工作原理
。按图#右侧图所示, 左棘爪 ! "型扳手的典型结构见图# 在右侧柄 上的内齿棘轮相啮合。手柄 顺时针旋转, 带动 $ # # 促使榫头也作顺时针旋转。 棘爪 $ 压向榫头 , 上的承压面 !, 这时, 扳手可对外输出扭矩, 手柄逆时针旋转, 棘轮齿将棘爪齿 从棘轮槽中推出。随着手柄的继续旋转, 棘爪齿在桃形弹簧 & 的拉力作用下进入后侧的棘轮槽。手柄再顺时针旋转, 扳手又 可对外输出扭矩。若转动换向手柄 1 , 则换向拨销 2 拉动桃形 弹簧, 从而将棘爪拉向左侧与棘轮相啮合。这时与以上相反, 手柄逆时针旋转, 扳手可对外输出扭矩再顺时针旋转, 扳手又 可对外输出扭矩。若转动换向手柄 1 , 则换向拨销 2 拉动桃形 弹簧, 从而将棘爪拉向左侧与棘轮相啮合。这时与以上相反, 手柄逆时针旋转, 扳手可对外输出扭矩。
’ . %
棘爪的受力分析 为便于分析, 将各棘爪齿的受力等效地集中到棘爪各受力
万方数据 齿面的对称中心 (图’ ) 。 图’中 3 *- 与棘爪齿面的交点- 上
$
% % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % %
; 修订日期: ! 收稿日期: $ ’ ’ & . ’ & . $ , $ ’ ’ & . ’ 1 . # 2
万方数据 作者简介: 林孟霞 ( , 女, 天津人, 工程师, 主要研究方向: 机械设计和计算机辅助设计。 # 2 / ( .)
" " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " "
( ) 计算: 式 ( ) ( 、 ) 中的角 # $ , $ . $ / - 按式
) $ $ , & # )*! & "7, - %0 &* " %
(
)
( ) $ ,
( ) $ ’ ( ) $ +
式 ( ) 中的! 角# ) $0 ) 之间。 $ , & - 在& & 是图’中承压面 1 与 0 * 3$ 联线间的夹角。 按式 ( ) 计算: $ 0 ( ) $ 0 齿面所承受的正压力用符号 “-<”表示, -< 的大小等于切 向力 -8 和径向力 分别在齿面法向的投影之和, 其计算公式 !
图! " #型爪与棘轮的啮合关系
。 对于棘轮尺寸和输出扭矩确定的扳手来说 -8 是定数, 降低! 降低 由式 ( ) 可知, 增大# $ , !就可以降低棘齿齿面的正压力。 有"个途径: 一是减小 " 这与 " " 7, 7 越多越好的原则相违背, 7 不能随意减小; 二是增加棘轮齿数 ", 在扳手外形尺寸不超过标 由式 ( ) 可知, 减小 4 准规定时这是可行的; 三是减小角度! $ 0 &。
值可以减小! 于是在强度允许的前提下, 应尽可能的使 ! 值 !。 为最小。 这就是选择榫头承压面中心高的原则。 开始计算时可 取" , 反之取大数。 待模数计算之后, 如不 # " 少时取小数, ! #" 合适再行调整, 重新计算模数。 $ $ $ 校核换向条件 棘爪能够顺利换向的充分必要条件是: 当棘爪对称中心线 与榫头承压面垂直时, 棘爪两承压面的交线 % (平面图上为点) 到榫头承压面的距离& 应等于或大于图$中的线段 ’ ( 的长度 即: ),
棘轮的齿数"、 棘爪的齿数" 7 和榫头承压面中心高是在计 算前给定的。 它们分别按以下原则选择: ( ) 棘轮齿数的选择。 $ 扳手能够实现的最小摆角就越小, 但在模 棘轮齿数"越多, 数一定的情况下, 扳手的外形尺寸就越大, 所以一般不希望"值 会导致棘爪不能换向, 为便于拉刀的分 太大, 但当 " 值过小时, 度, 以提高棘轮的分度精度, 一般常选择能够除尽 " . & ) 的整数, 如% , , , , , , , , , , , & % ’ % + " & " % " . ’ & ’ + ’ , + & . & / %等。 ( ) 棘爪齿数的选择。 % 棘爪的齿数" 扳手的承载能力越大。 或者说, 扳手的 7 越多, 输出扭矩一定, 每个爪齿所承受的负荷就越小。 所以 " 7 越多, 但由于棘爪换向空间的限制, 也不能选得太大, 一 " 7 越多越好。 般可选 " / / " $$ "。 . + 7 %$ ( ) 榫头承压面中心高的选择。 " 榫头承压面中心高是指棘轮中心到榫头承压面 1 (图 ’ ) 的垂直距离, 用符号 4 表示。 根据式 ( ) 可知, 增大 # $ . - 值可以