棘轮机构设计举例(全)
棘轮机构槽轮机构课件

齿式棘轮机构
2—棘爪 4—棘轮 6—止回棘爪
2.齿式棘轮机构的常见类型及特点
外啮合式
外啮合式棘轮机构
内啮合式
内啮合式
4.摩擦式棘轮机构简介
靠偏心楔块(棘爪)和 棘轮间的楔紧所产生的摩擦 力来传递运动。 特点:转角大小的变化 不受轮齿的限制,在一定范 围内可任意调节转角,传动 噪声小,但在传递较大载荷 时易产生滑动。 1-偏心楔块(棘爪) 2-棘轮 3-止回棘爪
二、槽轮机构
1.槽轮机构的组成和工作原理
槽轮机构
1-拨和特点
单圆销外槽轮机构 双圆销外槽轮机构 内啮合槽轮机构
槽轮机构的类型和特点
特点: 特点:结构简单,转位方便,工作可靠,传动的平 稳性好,能准确控制槽轮的转角。但转角的大小受到槽 数z的限制,不能调节,且在槽轮转动的始末位置处存在 冲击,随着转速的增加或槽轮槽数的减少而加剧,故不 适用于高速。
第五章 常用机构
§5—3棘轮机构 槽轮机构 棘轮机构
间歇机构——能够将主动件的连续运动转换 间歇机构 成从动件有规律的周期性运动或停歇。 一、棘轮机构 二、槽轮机构
一、棘轮机构
棘轮机构分为齿式棘轮机构 摩擦式棘轮机构 齿式棘轮机构和摩擦式棘轮机构 齿式棘轮机构 摩擦式棘轮机构。
1.齿式棘轮机构工作原理
棘轮机构-(公开课)
机械设计基础
6.1 棘轮机构
6.1.3 棘轮机构的特点与应用
结构简单,制造容易运动可靠
棘轮的转角在很大范围内可调
工作时有较大的冲击和噪声、运动精度不高,常用于低速场合
棘轮机构还常用作防止机构逆转的停止器。
机械设计基础
6.2 槽轮机构
6.2.1 槽轮机构的工作原理
当拨盘上的圆柱销A没有 进入槽轮的径向槽时,槽轮 的内凹锁止弧面被拨盘上的 外凸锁止弧面卡住,槽轮静 止不动。当圆柱销A进入槽轮 的径向槽时,锁止弧面被松 开,则圆柱销A驱动槽轮转动。 当拨盘上的圆柱销离开径向 槽时,下一个锁止弧面又被 卡住,槽轮又静止不动。由 此将主动件的连续转动转换 为从动槽轮的间歇运动
2.单圆柱销槽轮机构的运动系数 总小于0.5,也就是说槽轮的运
动时间总小于其静止的时间
机械设计基础
6.2 槽轮机构
3.如果要求槽轮机构的 大于0.5,则可在拨盘上安装多个圆柱销。设 拨盘1上均匀分布k个圆柱销,则:
ktmk(z2)
t
2z
由于 应当小于1,故
k 2z z2
得到:
z=3 z=4或5 z≧6
机械设计基础
矩形齿双向式棘轮机构
机械设计基础
回转棘爪双向式棘轮机构
机械设计基础
槽轮机构
机械设计基础
内啮合棘轮机构
机械设计基础
空间棘轮机构
观看动画
机械设计基础
6.2 槽轮机构
6.2.2 槽轮机构的类型、特点及应用
内啮合棘轮机构 外啮合棘轮机构
空间棘轮机构
•优点:结构简单、工作可靠、机械效率高,能较平稳、间歇 地进行转位
•缺点:圆柱销突然进入与脱离径向槽,传动存在柔性冲击, 不适合高速场合,转角不可调节,只能用在定角场合
棘轮机构设计举例全
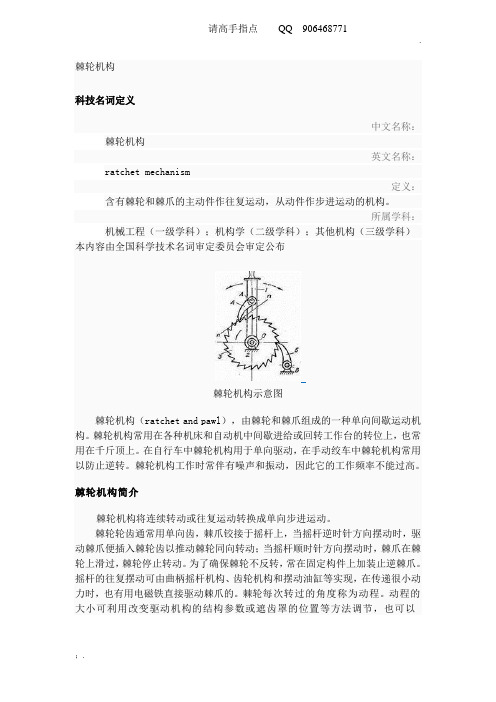
棘轮机构设计举例全 IMB standardization office【IMB 5AB- IMBK 08- IMB 2C】请高手指点棘轮机构科技名词定义中文名称:棘轮机构英文名称:ratchet mechanism定义:含有棘轮和棘爪的主动件作往复运动,从动件作步进运动的机构。
所属学科:(一级学科);(二级学科);其他机构(三级学科)本内容由审定公布棘轮机构示意图棘轮机构(ratchet and pawl),由棘轮和棘爪组成的一种单向。
棘轮机构常用在各种和自动机中间歇进给或回转工作台的转位上,也常用在千斤顶上。
在自行车中棘轮机构用于单向驱动,在手动绞车中棘轮机构常用以防止逆转。
棘轮机构工作时常伴有噪声和振动,因此它的工作频率不能过高。
棘轮机构简介棘轮机构将连续转动或往复运动转换成单向步进运动。
棘轮轮齿通常用单向齿,棘爪铰接于摇杆上,当摇杆逆时针方向摆动时,驱动棘爪便插入棘轮齿以推动棘轮同向转动;当摇杆顺时针方向摆动时,棘爪在棘轮上滑过,棘轮停止转动。
为了确保棘轮不反转,常在上加装止逆棘爪。
摇杆的往复摆动可由曲柄摇杆机构、齿轮机构和等实现,在传递很小动力时,也有用电磁铁直接驱动棘爪的。
棘轮每次转过的角度称为动程。
动程的大小可利用改变驱动机构的结构参数或遮齿罩的位置等方法调节,也可以在运转过程中加以调节。
如果希望调节的精度高于一个棘齿所对应的角度,可应用多棘爪棘轮机构。
一棘轮机构(ratchet mechanism)的基本型式和工作原理图示为机械中常用的外啮合式棘轮机构,它由主动摆杆,棘爪,棘轮、止回棘爪和机架组成。
主动件空套在与棘轮固连的从动轴上,并与驱动棘爪用转动副相联。
当主动件顺时针方向摆动时,驱动棘爪便插入棘轮的齿槽中,使棘轮跟着转过一定角度,此时,止回棘爪在棘轮的齿背上滑动。
当主动件逆时针方向转动时,止回棘爪阻止棘轮发生逆时针方向转动,而驱动棘爪却能够在棘轮齿背上滑过,所以,这时棘轮静止不动。
棘轮机构的组成及其工作原理
一、棘轮机构的组成及其工作原理 组成:摆杆、棘爪、棘轮、止动爪。 工作原理:摆杆往复摆动,棘爪推动棘轮间歇转动。
优点:结构简单、制造方便、运动可靠、转角可调。
缺点:工作时有较大的冲击和噪音,运动精度较差。 适用于速度较低和载荷不大的场合。
二、棘轮机构的类型与应用 按轮齿分布有: 外缘、 内缘、 端面棘轮机构。
h=0.75m a=m a1=(0.5~0.7)a α=20°
棘轮宽b
b=(1~4)m
棘爪斜高h1 、齿斜高h’ 棘轮齿根圆角半径rf 棘爪尖端圆角半径r1
棘爪长度L
h1=h’ ≈h/cosα
rf =1.5 mm r1 =2 mm 一般取 L=2p
齿槽角
L
p
o2
h1 a
h’ a1 α
da
60°~80°
h
o1
r1 rf
JM 返回
tgα> f =tgφ ∴ α>φ
da
o1
当 f=0.2 时,φ=11°30’
通常取α=20°
齿偏角
JM 返回
棘轮几何尺寸计算公式
棘轮参数
计算公式或取值
齿数z
12~25
模数m
1、1.5、2、2.5、3、 3.5、4、5、6、8、10
顶圆直径da 齿间距p
da =mz P=πm
齿高h 齿顶弦长a 棘爪工作面长度a1 齿偏角α
A
JM 返回
三、设计要点
正压力-Pn
摩擦力-F
要求在工作时,棘爪在Pn和F的作用下,能自动滑入棘轮齿槽。
条件是两者对O’的力矩要满足 如下条件:
Mpn>MF
L
o2 M pr
棘轮机构设计举例(全)
.棘轮机构科技名词定义中文名称:棘轮机构英文名称:ratchet mechanism定义:含有棘轮和棘爪的主动件作往复运动,从动件作步进运动的机构。
所属学科:机械工程(一级学科);机构学(二级学科);其他机构(三级学科)本内容由全国科学技术名词审定委员会审定公布棘轮机构示意图棘轮机构(ratchet and pawl),由棘轮和棘爪组成的一种单向间歇运动机构。
棘轮机构常用在各种机床和自动机中间歇进给或回转工作台的转位上,也常用在千斤顶上。
在自行车中棘轮机构用于单向驱动,在手动绞车中棘轮机构常用以防止逆转。
棘轮机构工作时常伴有噪声和振动,因此它的工作频率不能过高。
棘轮机构简介棘轮机构将连续转动或往复运动转换成单向步进运动。
棘轮轮齿通常用单向齿,棘爪铰接于摇杆上,当摇杆逆时针方向摆动时,驱动棘爪便插入棘轮齿以推动棘轮同向转动;当摇杆顺时针方向摆动时,棘爪在棘轮上滑过,棘轮停止转动。
为了确保棘轮不反转,常在固定构件上加装止逆棘爪。
摇杆的往复摆动可由曲柄摇杆机构、齿轮机构和摆动油缸等实现,在传递很小动力时,也有用电磁铁直接驱动棘爪的。
棘轮每次转过的角度称为动程。
动程的大小可利用改变驱动机构的结构参数或遮齿罩的位置等方法调节,也可以请高手指点QQ 906468771在运转过程中加以调节。
如果希望调节的精度高于一个棘齿所对应的角度,可应用多棘爪棘轮机构。
一棘轮机构(ratchet mechanism)的基本型式和工作原理图示为机械中常用的外啮合式棘轮机构,它由主动摆杆,棘爪,棘轮、止回棘爪和机架组成。
主动件空套在与棘轮固连的从动轴上,并与驱动棘爪用转动副相联。
当主动件顺时针方向摆动时,驱动棘爪便插入棘轮的齿槽中,使棘轮跟着转过一定角度,此时,止回棘爪在棘轮的齿背上滑动。
当主动件逆时针方向转动时,止回棘爪阻止棘轮发生逆时针方向转动,而驱动棘爪却能够在棘轮齿背上滑过,所以,这时棘轮静止不动。
因此,当主动件作连续的往复摆动时,棘轮作单向的间歇运动。
棘轮机构设计举例全

请高手指点棘轮机构科技名词定义中文名称:棘轮机构英文名称:ratchet mechanism定义:含有棘轮和棘爪的主动件作往复运动,从动件作步进运动的机构。
所属学科:(一级学科);(二级学科);其他机构(三级学科)本内容由审定公布棘轮机构示意图棘轮机构(ratchet and pawl),由棘轮和棘爪组成的一种单向。
棘轮机构常用在各种和自动机中间歇进给或回转工作台的转位上,也常用在千斤顶上。
在自行车中棘轮机构用于单向驱动,在手动绞车中棘轮机构常用以防止逆转。
棘轮机构工作时常伴有噪声和振动,因此它的工作频率不能过高。
棘轮机构简介棘轮机构将连续转动或往复运动转换成单向步进运动。
棘轮轮齿通常用单向齿,棘爪铰接于摇杆上,当摇杆逆时针方向摆动时,驱动棘爪便插入棘轮齿以推动棘轮同向转动;当摇杆顺时针方向摆动时,棘爪在棘轮上滑过,棘轮停止转动。
为了确保棘轮不反转,常在上加装止逆棘爪。
摇杆的往复摆动可由曲柄摇杆机构、齿轮机构和等实现,在传递很小动力时,也有用电磁铁直接驱动棘爪的。
棘轮每次转过的角度称为动程。
动程的大小可利用改变驱动机构的结构参数或遮齿罩的位置等方法调节,也可以在运转过程中加以调节。
如果希望调节的精度高于一个棘齿所对应的角度,可应用多棘爪棘轮机构。
一棘轮机构(ratchet mechanism)的基本型式和工作原理图示为机械中常用的外啮合式棘轮机构,它由主动摆杆,棘爪,棘轮、止回棘爪和机架组成。
主动件空套在与棘轮固连的从动轴上,并与驱动棘爪用转动副相联。
当主动件顺时针方向摆动时,驱动棘爪便插入棘轮的齿槽中,使棘轮跟着转过一定角度,此时,止回棘爪在棘轮的齿背上滑动。
当主动件逆时针方向转动时,止回棘爪阻止棘轮发生逆时针方向转动,而驱动棘爪却能够在棘轮齿背上滑过,所以,这时棘轮静止不动。
因此,当主动件作连续的往复摆动时,棘轮作单向的间歇运动。
2 棘轮机构的分类方式有以下几种:按结构形式分为齿式棘轮机构和摩擦式棘轮机构齿式棘轮机构结构简单,制造方便;动与停的时间比可通过选择合适的驱动机构实现。
棘轮设计举例说明
棘轮的设计大家可以按照下面的步骤来进行设计,实际问题再实际分析(1)棘轮的设计棘轮的齿数,如果系手摇绞车所用,大约为8~16齿的程度。
本设计取z=14。
作为中间轴的力矩,为制动器之项的回转力矩Mt = (作用於制动轮的回转力)x(制动轮的半径)= TxRBT=258kg RB=12.5cm 代入Mt=258x12.5=3225kgcmp=3.75*( Mt/(z*sb*K))0.333以上记之值代入z=14sb=300kg/cm2K=(0.5~1.0) 取0.8P=3.75(3225/14/300/0.8)0.333=36mm模数m = p/p = 36/3.14 ≒11.46 ≒12m = 12p = m*p= 12 x 3.14 ≒37.7mm齿的高度h = 0.35p = 0.35x37.7 = 13.195mm = 14mm齿尖的厚度c = 0.25p = 0.25x37.7 = 9.42 = 10mm棘轮的外接直径D = m*z = 12x14 = 168mm棘轮的宽度b = K*P = 0.8*37.7 = 30.16mm = 30mm掣子的角度a=15°对棘轮的压力的压溃强度由sc = T/(bh),T= 2Mt/D之值代入Mt= 3225kgcmD= 16.8cmb = 3cmh = 1.4cmsc= 3225x2/16.8/3/1.4=91.4kg/cm2=0.914kg/mm2容许压应力的范围0.5~1.0kg/mm2,所以上记之值在此范围内不会因受压缩而压溃(2)掣子轴的设计掣子轴的直径为d 在掣子轴发生弯曲力作用,故其弯曲力矩设为M,则M = (作用於掣子的力)x(掣子宽x棘轮宽) / 2= T*b/2T= 2Mt/D= 3225x2/16.8=383.9kgT= 384(kg)*3/2=576kgcmsb= 400kg/cm2d= (32M/p/sb)0.333=(32x576/3.14/400)0.333=2.45d= 25mm掣子轴受剪的情形:取ss=400kg/cm2d=(4T/psS)0.5=(4X384/3.14/400)0.5=1.12cm=12mm由上记两者比较,应取受弯曲作用时之直径d=25mm(3)板弹簧的设计使用板弹簧、板弹簧的设计,需考虑制动轮、掣子、棘轮、中间轴、机架的相互位置,於绘制构想图中决定之,即棘轮的大小,棘轮齿的宽度,均应考虑,然後在构想的阶段假定长l,厚t,宽b,求其弯曲应力。
45个棘轮机构动图,直观易懂,看到就是赚到
45个棘轮机构动图,直观易懂,看到就是赚到编者按今天分享来自越南的设计师Nguyen Duc Thang使用Inventor 绘制了大量经典的棘轮机械结构,直观易懂,看到就是赚到。
1.棘轮机构1将驱动轴的连续旋转直接转换成驱动轴的间断性旋转的设备。
2.棘轮机构2此机制直接将驱动轴的连续旋转转换成驱动轴的间断性旋转。
通过下移蓝色棘爪无需改变输入的运动方向即可改变被驱动轴的运动方向。
3.钣金棘轮传动11)适用于轻负载2)低成本3)适用于大规模生产4)棘爪与棘轮的永久性接触由棘爪的重量维持4.钣金棘轮传动21)适用于轻负载2)低成本3)适用于大规模生产4)棘爪与棘轮的永久性接触由棘爪的重量维持5.棘轮机构3通过调整粉色后盖的位置可以得到绿色轮的不同旋转角度。
拉动橙色棘爪并使其旋转180°可以改变绿色轮的旋转方向。
此机制用于成形器。
6.棘轮机构4棘轮有内齿。
7.棘轮机构5自行车自由轮。
蓝色链轮从脚踏自行车接收运动。
黄色轮毂仅在蓝色链轮顺时针旋转时旋转。
黄色轮毂顺时针旋转对蓝色链轮没有影响。
由于弹簧的作用,红色棘爪总是压向链轮的内齿。
现实中使用了两个棘爪。
8.棘轮机构8绿色输入圆盘通过蓝色棘爪使得输出棘轮间断性旋转。
粉色和黄色销控制棘轮的停止时间。
每一个销使得棘轮在输入圆盘旋转1/8周期间停止。
由于弹簧(未显示)的作用,蓝色棘爪总是压向棘轮齿。
9.棘轮机构9有两个棘爪。
粉色棘爪推动棘轮。
绿色棘爪在粉色棘爪反向运动时维持棘轮静止。
10.棘轮机构12有两个棘爪。
绿色棘爪推动粉色齿轮,且不是一直与其接触(不同于普通棘轮机构)。
蓝色棘爪在绿色棘爪不推动齿轮时维持棘轮静止。
11.销齿轮棘轮机构1输入:粉色曲柄持续性旋转。
输出:黄色销齿轮。
重力维持蓝色棘爪和销齿轮的接触。
12.棘轮机构13黄色输入圆盘通过橙色棘爪使得绿色输出棘轮间断性旋转。
蓝色凸轮的长度调节棘轮的运动时间。
13.棘轮机构15有两个棘爪。
粉色棘爪推动棘轮。
《棘轮机构》课件
超越式棘轮机构主要由主动件、从动件和棘轮组成,通过主动件和从动件的相互 配合,实现两个方向的运动或动力传递。这种机构具有结构简单、传动平稳、承 载能力较大等优点,但需要精确控制主动件和从动件的配合关系。
单向式棘轮机构
总结词
只能实现单向的运动或动力传递。
详细描述
单向式棘轮机构主要由棘轮和棘爪组成,只能实现单向的运动或动力传递。这种机构具有结构简单、制造方便等 优点,但只能用于单向的传动系统。
02 棘轮机构的基本类型
摩擦式棘轮机构
总结词
通过利用两个接触面之间的摩擦力来传递运动和动力。
详细描述
摩擦式棘轮机构主要由棘轮和棘爪组成,通过棘轮和棘爪之间的摩擦力来传递 运动和动力。这种机构具有结构简单、制造方便、传动平稳等优点,但易磨损, 承载能力较小。
超越式棘轮机构
总结词
能够实现超越功能,使两个方向的运动或动力传递成为可能。
只能实现单向转动,反向时需要依靠其 他机构实现。
特点 结构简单,工作可靠,传动平稳。
工作原理
Байду номын сангаас
01
当主动件顺时针转动时,通过连 杆带动棘爪也顺时针转动,棘爪 在摩擦力的作用下推动棘轮顺时 针转动。
02
当主动件逆时针转动时,棘爪在 摩擦力的作用下会卡住棘轮,使 棘轮静止不动,从而实现了单向 传动的目的。
THANKS FOR WATCHING
感谢您的观看
精度较低
由于棘轮机构的制造和装配误差等因 素,其传动精度相对较低。
不适合高速运动
由于棘轮机构的运动特性,其不适合 高速运动和重载条件下的应用。
调整困难
对于某些工作需求,可能需要频繁调 整棘轮机构的参数,这可能会增加维 护和调整的难度。
棘轮机构设计举例
请高手指点棘轮机构科技名词定义中文名称:棘轮机构英文名称:ratchet mechanism定义:含有棘轮和棘爪的主动件作往复运动,从动件作步进运动的机构。
所属学科:机械工程(一级学科);机构学(二级学科);其他机构(三级学科)本内容由全国科学技术名词审定委员会审定公布棘轮机构示意图棘轮机构(ratchet and pawl),由棘轮和棘爪组成的一种单向间歇运动机构。
棘轮机构常用在各种机床和自动机中间歇进给或回转工作台的转位上,也常用在千斤顶上。
在自行车中棘轮机构用于单向驱动,在手动绞车中棘轮机构常用以防止逆转。
棘轮机构工作时常伴有噪声和振动,因此它的工作频率不能过高。
棘轮机构简介棘轮机构将连续转动或往复运动转换成单向步进运动。
棘轮轮齿通常用单向齿,棘爪铰接于摇杆上,当摇杆逆时针方向摆动时,驱动棘爪便插入棘轮齿以推动棘轮同向转动;当摇杆顺时针方向摆动时,棘爪在棘轮上滑过,棘轮停止转动。
为了确保棘轮不反转,常在固定构件上加装止逆棘爪。
摇杆的往复摆动可由曲柄摇杆机构、齿轮机构和摆动油缸等实现,在传递很小动力时,也有用电磁铁直接驱动棘爪的。
棘轮每次转过的角度称为动程。
动程的大小可利用改变驱动机构的结构参数或遮齿罩的位置等方法调节,也可以在运转过程中加以调节。
如果希望调节的精度高于一个棘齿所对应的角度,可应用多棘爪棘轮机构。
一棘轮机构(ratchet mechanism)的基本型式和工作原理图示为机械中常用的外啮合式棘轮机构,它由主动摆杆,棘爪,棘轮、止回棘爪和机架组成。
主动件空套在与棘轮固连的从动轴上,并与驱动棘爪用转动副相联。
当主动件顺时针方向摆动时,驱动棘爪便插入棘轮的齿槽中,使棘轮跟着转过一定角度,此时,止回棘爪在棘轮的齿背上滑动。
当主动件逆时针方向转动时,止回棘爪阻止棘轮发生逆时针方向转动,而驱动棘爪却能够在棘轮齿背上滑过,所以,这时棘轮静止不动。
因此,当主动件作连续的往复摆动时,棘轮作单向的间歇运动。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
棘轮机构
科技名词定义
中文名称:棘轮机构
英文名称:ratchet mechanism
定义:含有棘轮和棘爪的主动件作往复运动,从动件作步进运动的机构。
所属学科:机械工程(一级学科);机构学(二级学科);其他机构(三级学科)本内容由全国科学技术名词审定委员会审定公布
棘轮机构示意图
棘轮机构(ratchet and pawl),由棘轮和棘爪组成的一种单向间歇运动机构。
棘轮机构常用在各种机床和自动机中间歇进给或回转工作台的转位上,也常用在千斤顶上。
在自行车中棘轮机构用于单向驱动,在手动绞车中棘轮机构常用以防止逆转。
棘轮机构工作时常伴有噪声和振动,因此它的工作频率不能过高。
棘轮机构简介
棘轮机构将连续转动或往复运动转换成单向步进运动。
棘轮轮齿通常用单向齿,棘爪铰接于摇杆上,当摇杆逆时针方向摆动时,驱动棘爪便插入棘轮齿以推动棘轮同向转动;当摇杆顺时针方向摆动时,棘爪在棘轮上滑过,棘轮停止转动。
为了确保棘轮不反转,常在固定构件上加装止逆棘爪。
摇杆的往复摆动可由曲柄摇杆机构、齿轮机构和摆动油缸等实现,在传递很小动力时,也有用电磁铁直接驱动棘爪的。
棘轮每次转过的角度称为动程。
动程的大小可利用改变驱动机构的结构参数或遮齿罩的位置等方法调节,也可以
请高手指点QQ 906468771
在运转过程中加以调节。
如果希望调节的精度高于一个棘齿所对应的角度,可应用多棘爪棘轮机构。
一棘轮机构(ratchet mechanism)的基本型式和工作原理
图示为机械中常用的外啮合式棘轮机构,它由主动摆杆,棘爪,棘轮、止回棘爪和机架组成。
主动件空套在与棘轮固连的从动轴上,并与驱动棘爪用转动副相联。
当主动件顺时针方向摆动时,驱动棘爪便插入棘轮的齿槽中,使棘轮跟着转过一定角度,此时,止回棘爪在棘轮的齿背上滑动。
当主动件逆时针方向转动时,止回棘爪阻止棘轮发生逆时针方向转动,而驱动棘爪却能够在棘轮齿背上滑过,所以,这时棘轮静止不动。
因此,当主动件作连续的往复摆动时,棘轮作单向的间歇运动。
2 棘轮机构的分类方式有以下几种:
按结构形式分为齿式棘轮机构和摩擦式棘轮机构
齿式棘轮机构结构简单,制造方便;动与停的时间比可通过选择合适的驱动机构实现。
该机构的缺点是动程只能作有级调节;噪音、冲击和磨损较大,故不宜用于高速。
齿式棘轮机构摩擦式棘轮机构
摩擦式棘轮机构是用偏心扇形楔块代替齿式棘轮机构中的棘爪,以无齿摩擦代替棘轮。
特点是传动平稳、无噪音;动程可无级调节。
但因靠摩擦力传动,会出现打滑现象,虽然可起到安全保护作用,但是传动精度不高。
适用于低速轻载的场合。
按啮合方式分外啮合棘轮机构和内啮合棘轮机构
外啮合式棘轮机构的棘爪或楔块均安装在棘轮的外部,而内啮合棘轮机构的棘爪或楔块均在棘轮内部。
外啮合式棘轮机构由于加工、安装和维修方便,应用较广。
内啮合棘轮机构的特点是结构紧凑,外形尺寸小。
外啮合式棘轮机构内啮合式棘轮机构
按从动件运动形式分单动式棘轮机构、双动式棘轮机构和双向式棘轮机构
单动式式棘轮机构当主动件按某一个方向摆动时,才能推动棘轮转动。
双动式棘轮机构,在主动摇杆向两个方向往复摆动的过程中,分别带动两个棘爪,两次推
动棘轮转动。
双动式棘轮机构常用于载荷较大,棘轮尺寸受限,齿数较少,而主动摆杆的摆角小于棘轮齿距的场合。
双动式棘轮机构
以上介绍的棘轮机构,都只能按一个方向作单向间歇运动。
双向式棘轮机构可通过改变棘爪的摆动方向,实现棘轮两个方向的转动。
图示为两种双向式棘轮机构的形式,双向式棘轮机构必须采用对称齿形。
外啮合棘轮机构
内啮合棘轮机构钩头双动式棘轮机构直推双动式棘轮机构可变向棘轮机构可变向棘轮机构棘条机构外摩擦式棘轮机构
内摩擦式棘轮机构
滚子内接摩擦式棘条机构双向式棘轮机构
3 棘轮机构的应用
棘轮机构的主要用途有:间歇送进、制动和超越等,以下是应用实例。
1.间歇送进
图示为牛头刨床,为了切削工件,刨刀需作连续往复直线运动,工作台作间歇移动。
当曲柄1转动时,经连杆2带动摇杆5作往复摆动;摇杆5上装有双向棘轮机构的棘爪3,棘轮4与丝杠6固连,棘爪带动棘轮作单方向间歇转动,从而使螺母(即工作台)作间歇进给运动。
若改变驱动棘爪的摆角,可以调节进给量;改变驱动棘爪的位置(绕自身轴线转过180°后固定),可改变进给运动的方向。
2.制动
图示为杠杆控制的带式制动器,制动轮与外棘轮2固结,棘爪3铰接于制动轮4上A点,制动轮上围绕着由杠杆5控制的钢带6。
制动轮4按逆时针方向自由转动,棘爪3在棘轮齿背上滑动,若该轮向相反方向转动,则4轮被被制动。
3.超越
图示的棘轮机构可以用来实现快速超越运动。
运动由蜗杆传到蜗轮,通过安装在蜗轮上的棘爪3驱动棘轮固连的输出轴5按图示方向慢速转动。
当需要轴快速转动时,可按输出轴的方向快速转动输出轴上的手柄,这时由于手动转速大于蜗轮转速,所以棘爪在棘轮齿背滑过,从而在蜗轮继续转动时,可用快速手动来实现输出轴超越蜗轮的运动。
4 棘轮机构的设计要点
棘轮机构的设计主要应考虑:棘轮齿形的选择、模数齿数的确定、齿面倾斜角的确定、行程和动停比的调节方法
现以齿式棘轮机构为例,说明其设计方法
1.棘轮齿形的选择
图示为常用齿形,不对称梯形用于承受载荷较大的场合;当棘轮机构承受的载荷较小时,可采用三角形或圆弧形齿形;矩形和对称梯形用于双向式棘轮机构。
2.模数、齿数的确定
与齿轮相同,棘轮轮齿的有关尺寸也用模数m作为计算的基本参数,但棘轮的
da来计算。
m = da/z
棘轮齿数z一般由棘轮机构的使用条件和运动要求选定。
对于一般进给和分度所用的棘轮机构,可根据所要求的棘轮最小转角来确定棘轮的齿数(z ≤250,一般取z = 8~30),然后选定模数。
3.齿面倾斜角的确定
棘轮齿面与径向线所夹α称为齿面倾斜角。
棘爪轴心O1与轮齿顶点A的连线
O1A与过A点的齿面法线nn的夹角β称为棘爪轴心位置角。
为使棘爪在推动棘轮的过程中始终紧压齿面滑向齿根部,应满足棘齿对棘爪的法向反作用力N对O1轴的力矩大于摩擦力Ff沿齿面)对O1轴的力矩,即
N·O1Asinβ > Ff·O1Acosβ
则Ff/N < tanβ
因为f = tan= Ff/N
所以tanβ > tan
即β >
式中f和分别为棘爪与棘轮齿面间的摩擦系数和摩擦角,一般f取0.13 ~0.2。
4. 行程和动停比的调节方法
1)采用棘轮罩
通过改变棘轮罩的位置,使部分行程棘爪沿棘轮罩表面滑过,从而实现棘轮转角大小的调整。
2)改变摆杆摆角
通过调节曲柄摇杆机构中曲柄的长度,改变摇杆摆角的大小,从而实现棘轮机构转角大小的调整。
3)采用多爪棘轮机构
要使棘轮每次转动的角度小于一个轮齿所对应的中心角γ时,可采用棘爪数为m 的多爪棘轮机构。
如n=3的棘轮机构,三棘爪位置依次错开γ/3 ,当摆杆转角Ф1在γ≥Ф1≥γ/3 范围内变化时,三棘爪依次落入齿槽,推动棘轮转动相应角度Ф2为γ≥Ф2≥γ/3 范围内γ/3 整数倍。