状态空间表示法例题
状态空间习题

x1 y = [ 0 1 0] x 2 x3
2
(3)已知 )
x1 = θ m . x2 = θ m .. x3 = θ m
则有: 则有:
x1 = ia x2 = θ m . x3 = θ m
x1 = θ m
⇓ A = P AP , B = P B , C = CP , D = D
−1 −1
5
建立状态空间表达式的一般方法有 • 由系统机理建立状态空间描述 • 微分方程转换成状态空间描述 • 传递函数转换成状态空间描述 • 由状态变量图求状态空间描述
习题1 习题1-8,9,16,17,19 16,17,
ɺ x1 − p1 x ɺ 2 = ⋮ ɺ xn 0 0 − p2 ⋱ x1 1 x 1 2 + u ⋮ ⋮ − pn xn 1
x1 x y = [c1 c2 ⋯ cn ] 2 + bou ⋮ xn
习题9 习题9-1
解:(1)已知状态变量为 :(1
x1 = θ m . . x2 = θ m = x1 .. . x3 = θ m = x 2 y = θ m = x1
且有
θm
Ua ( s ) = Cm 2 s LaLms + ( Lafm + JmRa ) s + ( Rafm + KbCm)
17
习题9 习题9-11~12
2 可观测标准形
ɺ x1 0 x 1 ɺ 2 = ⋮ ⋮ ɺ xn 0 − an −an −1 ⋮ −a1 x1 bn − an bo x b − a b 2 + n −1 n −1 o u ⋮ ⋯ xn b1 − a1bo
控制系统的状态空间描述
1.1 控制系统状态空间描述常用的基本概念
1.动力学系统 :一个能贮存输入信息的系统
称为动力学系统。 [例1.1-1] 设有图1.1所示系统。 教材P7
i(t) 1 u(t) R1 R2
(1.1 1)
式(1.1-1)为一代数 方程,它表明此系统的行 为可以由输出与输入之间 的瞬间关系来确定,与系 统的过去历史无关。
设: x1 i, xˆ1 i,
x2
1 C
idt
xˆ2 idt
则: x1 xˆ1 ,
x2
1 C
xˆ2
则有: x Pxˆ P为非奇异变换矩阵
其中:
x
x1 x2
xˆ
xˆ1 xˆ2
1 0
P 0
1 C
[例2]弹簧-质量-阻尼系统
储能元件名称 电感L 电容C 质量M 弹簧k
转动惯量J
状态变量 流经L的电流i 电容的电压u 质量M的位移速度v
弹簧位移y 旋转角速度ω
[例1] 试列写如图所示RLC的电路方程,建立 系统的状态空间表达式。
解: 1.设状态变量为:
x1 i,
x2
u c
1 C
idt
(1)
2.根据基尔荷夫定律组成系统的原始方程。
此,可以选取如下一组状态变量:
x1 x2 x3
y y y
xn y(n1)
(1.3.2)
x1 x2 x2 x3
(1.3.3)
x n 1
xn
xn an x1 an1x2 a2 xn1 a1xn bu
电气系统状态空间表达式例题
电气系统状态空间表达式例题状态空间表达式是描述线性时不变系统动态行为的一种数学模型,它基于系统的状态变量和控制变量来描述系统的动态行为:
假设有一个电气系统,其动态行为可以用以下微分方程描述:
dx/dt = Ax + Bu
y = Cx + Du
其中,x 是系统的状态变量,u 是系统的控制输入,y 是系统的输出。
A、B、C 和 D 是系统的系数矩阵,它们描述了系统内部状态变量之间的动态关系以及系统对控制输入和输出的响应。
根据状态空间表达式,我们可以将上述微分方程转换为以下形式:
x' = Ax + Bu
y = Cx + Du
其中,x' 是新的状态变量,它包含了系统状态的导数。
这个形式的状态空间表达式包含了系统的动态行为,可以通过控制输入 u 来影响系统的状态变量 x 和输出 y。
需要注意的是,具体的系数矩阵 A、B、C 和 D 取决于具体的电气系统,需要根据系统的具体参数和特性来确定。
线性系统的状态空间分析与综合例题解析
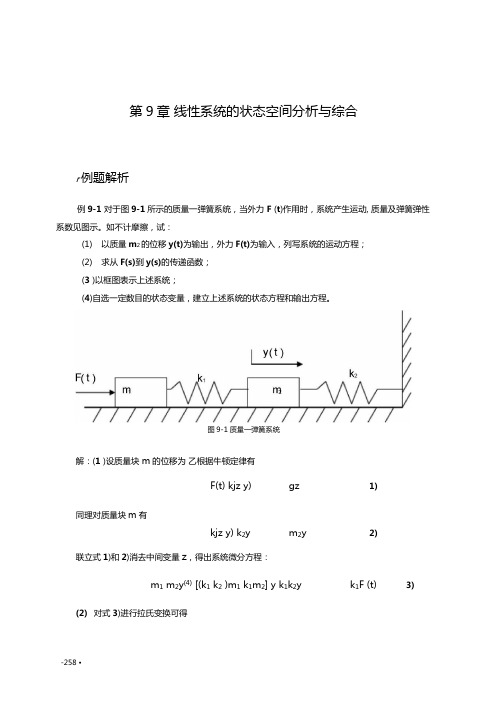
第9章线性系统的状态空间分析与综合r例题解析例9-1 对于图9-1所示的质量一弹簧系统,当外力F (t)作用时,系统产生运动, 质量及弹簧弹性系数见图示。
如不计摩擦,试:(1)以质量m2的位移y(t)为输出,外力F(t)为输入,列写系统的运动方程;(2)求从F(s)到y(s)的传递函数;(3 )以框图表示上述系统;(4)自选一定数目的状态变量,建立上述系统的状态方程和输出方程。
图9-1质量一弹簧系统解:(1 )设质量块m的位移为乙根据牛顿定律有F(t) kjz y) gz 1)同理对质量块m有kjz y) k2y m2y 2)联立式1)和2)消去中间变量z,得出系统微分方程:m1 m2y(4)[(k1 k2 )m1 k1m2] y k1k2y k1F (t) 3)(2)对式3)进行拉氏变换可得-258 •迪一4 --------------------- ------------ 2—4)F (s) m1m2s [(k1 k2)m1 k1m2 ]s k1k2-259 •(3)对式(1)进行拉氏变换可得Z(s)k i、Y(s) F(s) m1s2k15)同样处理式2)有Y(s) k12Z(s) m s k k6)k1 *图9-2 系统结构图x1z x1 x2 zx3 y x3 x4 y由式1)X2 z k1 X11X3 F(t) m1m1m1 k t k? &x3x-i因此有k1 x m1k2m210 k1 010 mh1 x m1 F(t)n 00 0 0m2由式5),式6)可以画出系统结构图,如图9-2所示。
(4)设状态变量由式2) x4yy 0 0 1 Ox-260 •-261 •例9-2 在图9-3所示系统中,若选取x i , x 2 , X 3作为状态变量,试列写其状态空间 表达式,并写成矩阵形式•图9-3解:由结构图可得2 u X 1) (s 3) x 22(X 2X 3) s(s 1)X 1X 3SX jy X 1整理可得系统状态空间方程表达式X 1 X 3X 22为 3x 2 2uX 32X 2 3X 3y X 1写成矩阵的形式0 1 0x 2 3 0 x 2 u23例9-3 设系统微分方程为y 7 y 14y 8y u 8u 15u系统初始条件为零,试:(1) 采用传递函数直接分解法,建立系统的状态空间表达式,并画出状态图; (2) 采用传递函数并联分解法,建立系统的状态空间表达式,并画出状态图。
答案 控制系统的状态空间描述 习题解答教学提纲

第2章 “控制系统的状态空间描述”习题解答2.5 系统的结构如图P2.5所示。
以图中所标记的1x 、2x 、3x 作为状态变量,推导其状态空间表达式。
其中,u 、y 分别为系统的输入、输出,1α、2α、3α均为标量。
3x 2x 图P2.5系统结构图解 图P2.5给出了由积分器、放大器及加法器所描述的系统结构图,且图中每个积分器的输出即为状态变量,这种图形称为系统状态变量图。
状态变量图即描述了系统状态变量之间的关系,又说明了状态变量的物理意义。
由状态变量图可直接求得系统的状态空间表达式。
着眼于求和点①、②、③,则有①:2111x x x +=α& ②: 3222x x x +=α&③:u x x +=333α&输出y 为1y x du =+,得11122233310001001x a x x a x u x a x ⎡⎤⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦⎣⎦&&& []123100x y x du x ⎡⎤⎢⎥=+⎢⎥⎢⎥⎣⎦2.8 已知系统的微分方程 (1) u y y y y 354=+++&&&&&&;(2) u u y y -=+&&&&&&32; (3) u u y y y y 75532+=+++&&&&&&&&&。
试列写出它们的状态空间表达式。
(1) 解 选择状态变量1y x =,2yx =&,3y x =&&,则有:122331231543x x x x x x x x u y x =⎧⎪=⎪⎨=---+⎪⎪=⎩&&& 状态空间表达式为:[]112233123010000105413100x x x x u x x x y x x ⎡⎤⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥---⎣⎦⎣⎦⎣⎦⎣⎦⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦&&&(2) 解 采用拉氏变换法求取状态空间表达式。
2.2状态空间表达式的建立

bn1s n1 b1s b0 Y ( s) g ( s) n U ( s) s an1s n1 a1s a0 Y ( s) U ( s) s n an1s n1 a1s a0
n
输出为:
bn1s
n 1
b1s b0
(2) 并联分解法
①极点两两相异时
N s g s N s Ds s p1 s p2 s pn c1 c2 cn s pn s p1 s p2
状态方程为:
dx1 R1 x2 uC 1 R1 R2 ( ) x1 dt L R1 R2 R1 R2 L L
dx2 R1 1 x1 x2 dt C R1 R2 C R1 R2
输出方程为:
y uC x2
写成矩阵形式
1 R1 R2 x1 L R1 R2 R x2 C(R R ) 1 2
3完全描述一个动态系统所需状态变量的个数有系统的4一般来说状态变量不一定是具有实际物理意义或可的阶次决定状态变量必须是相互独立的
2.2 状态空间表达式的建立
2.2.1.由物理机理直接建立状态空间表达式 例2.2.1 系统如图所示
L
R2
u
iL
R1
uc
解:选择状态变量:x1 根据基尔霍夫定律:
iL , x2 uC ,
0 bn 1 bn 1 an 10 2 bn 2 an 11 an 20 n b0 an 1 n 1 an 2 n 2 a11 a00
Step1计算
step 2 定义状态变量:
人工智能导论状态空间表示open表close表例题

人工智能导论状态空间表示open表close表例题人工智能导论:状态空间表示与open表、close表在人工智能领域,状态空间表示是一种描述问题的形式化模型,它以状态为基本单位,通过状态之间的转移关系来描述问题的结构及其解空间。
而open表和close表则是在搜索问题解空间时常用的数据结构,用于记录搜索过程中的状态和路径信息,以便进行有效的搜索和剪枝。
本文将介绍状态空间表示的基本概念,以及open表和close 表的作用和例题应用。
一、状态空间表示1. 什么是状态空间表示?状态空间是指问题的所有可能状态的集合,而状态空间表示则是将问题中的状态、动作和转移关系用数学形式表示出来,以便进行问题分析、求解和模拟。
状态空间表示有助于我们更好地理解问题的结构、约束和解空间,从而选择合适的搜索策略和算法进行求解。
2. 怎样表示状态空间?状态空间表示通常使用图或者矩阵等形式进行表达,其中节点代表问题的状态,边或者转移函数表示状态之间的转移关系。
在八数码问题中,每个状态都可以用一个3x3的矩阵表示出来,矩阵中的数字代表每个位置的数码,而移动操作则对应着矩阵中数码的交换操作。
3. 状态空间表示的意义和价值状态空间表示可以帮助我们更好地理解问题的结构和特性,有助于问题分析和算法设计。
通过状态空间表示,我们可以清晰地描述问题的起始状态、目标状态和状态转移规则,为搜索和规划提供了明确的方向和约束。
二、open表和close表1. open表和close表的作用在搜索问题的解空间时,我们通常需要记录已访问的状态以及其相关信息,以便进行有效的搜索和避免重复访问。
这就引出了open表和close表这两种数据结构,它们分别用于记录待访问状态和已访问状态,以保证搜索的完整性和高效性。
2. open表和close表的结构和操作open表通常采用队列、堆栈或者优先队列等数据结构来实现,用于存储待访问状态及其相关信息,并根据搜索策略进行状态的出队和入队操作。
考研必备之自动化专业_自控原理_第九章_状态空间分析法答案_计算题

计算和证明题.1 已知机械系统如图9-7所示,21,m m 为质量块,1m 受外力)(t F 作用。
弹簧的弹性系数如图示,如不计摩擦,自选一定数目的状态变量,建立系统的状态空间描述。
提示:设中间变量质量块1m 的位移为z ,根据牛顿定律有zm y z k t F 11)()(=-- ① 同理对质量块2m 有ym y k y z k 221)(=-- ② 设状态变量z x =1 12x zx == y x =3 34x y x == 由式① 13111112)(m t F x m k x m k z x++-== 由式② 32211214x m k k x m k y x+-== 因此有)(001000100000001143212212111114321t F m x x xx m k k m k m k m k x x x x ⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡+--=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡ []⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=43210100x x x x y .2 已知系统结构图如图9-8所示。
试写出系统的状态方程和输出方程(要求写成矢量形式)。
提示:[]xy u x x 01101212=⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡--= .3 已知系统的微分方程,试建立其相应的状态空间描述,并画出相应的状态结构图。
(1)u u u y y y y 86375++=+++(2)u u u y y y y 23375++=+++提示:(1)[]x u x x 168100573100010=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=y ,状态结构图略 (2)[]ux u x x +---=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=54110057310001y ,状态结构图略。
.4判断下列矩阵是否满足状态转移矩阵的条件,如果满足,试求与之对应的A 阵。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
M(A 1 2) 1 2 3
S '1
B A 1 2 A 2 3) 2 3 A B
S '3
目标状态
二阶汉诺塔问题的状态空间图
目标状态
[附录] 分钱币问题 假设有7个钱币,任一选手只能将已分好 的一堆钱币分成两堆个数不等的钱币,两 位选手轮流进行,直到每一堆都只有一个 或两个钱币,不能再分为止,哪个遇到不 能分的情况,则就为输。 假设对方先走,我方是否有必胜策略?
2 8 3 1 4 7 6 5
8 3 2 1 4 7 6 5 8 3 2 1 4 7 6 5 2 8 3 7 1 4 6 5 2 8 3 7 1 4 6 5
8 3 2 6 4 1 7 5
2 3 2 8 3 2 8 3 6 7 4 6 8 4 6 4 5 1 7 5 1 7 5 1
目标状态
2 8 3 2 3 2 8 3 1 4 1 8 4 1 6 4 5 7 6 5 7 6 5 7
1.自然语言描述
1)老农携带羊羔过河,把狐狸和白菜留在南岸; 2)老农到达北岸,把羊羔留在北岸,并独自回到南岸; 3)老农携带狐狸过河,把白菜留在南岸; 4)老农到达北岸,把狐狸留下,并带上羊羔回到南岸; 5)老农把羊羔留在南岸,携带白菜过河; 6)老农到达北岸,把白菜和狐狸留在北岸,独自回到南岸; 7)老农最后携带羊羔过河,到达北岸。问题就此解决。
2.状态和操作
用符号表示:
M:代表老农(farmer)
F:代表狐狸(fox) L:代表羊羔(lamb) C:代表白菜(cabbage) S:表示在南岸
N:表示在北岸
S-N:表示从南到北 N-S :表示从北到南
用(M,F,L,C)表示四个对象的一个状态, 可有S和N两个值;
改变状态的操作,可分别用1,0表示。表示 对象“在船上”和“不在船上”两个值。
[例1] 重排九宫问题
2 8 3 1 6 4 7 ■ 5
初始状态
1 2 ■ 8 7 6
3 4 5
目标状态
要求:用尽可能少棋步能由初始状态到达目标 状态。
2 8 3 1 6 4 7 5 2 8 3 1 6 4 7 5 2 8 3 6 4 1 7 5 8 3 2 6 4 1 7 5 2 8 3 6 4 1 7 5 2 8 3 1 4 7 6 5 2 3 1 8 4 7 6 5 2 3 1 8 4 7 6 5 1 2 3 8 4 7 6 5 2 3 1 8 4 7 6 5 2 3 4 1 8 7 6 5
6.问题求解过程的表示
S--N(1,0,1,0) (N,S,N,S) N--S(1,0,0,0)
(S,S,N,S) S--N(1,0,0,1) S--N(1,1,0,0)
(N,N,N,S) N--S(1,0,1,0) (S,N,S,S) S--N(1,O,0,1)
(N,S,N,N) N--S(1,0,1,0) (S,S,S,N) S--N(1,1,0,0)
S0=(1,1)
S1=(1,2)
S2=(1,3)
S3=(2,1)
S4=(2,2)
S5=(2,3)
S6=(3,1)
S7=(3,2)
S8=(3,3)
二阶梵塔问题状态表示
二阶梵塔状态空间图
M(盘符,i, j)
1 2 3
S0
初始状态
盘符=A,B i,j∈{1,2,3}
A M(A 1 3) 1 2 3 S1 B M(B 1 2) 1 2 B M(A 3 2) 1 2 A B 3 S3 A 3 S 2 A
对方先走 (6,1)
(7) (5,2) (3,2,2) (4,3)
(5,1,1) (4,2,1)
(3,3,1)
(4,1,1,1) (3,1,1,1,1)
(3,2,1,1)
(2,2,2,1) 对方胜 我方胜
(2,2,1,1,1)
(2,1,1,1,1,1) 对方胜
分钱币问题的搏弈图
算符: A( i,j):表示把A从第i号针移到第j号针上
B(i,j):表示把B从第i号针移到第j号针上 共12个算符: A(1,2), A(1,3), A(2,1) ,A(2,3), A(3,1),A(3,2) B(1,2), B(1,3), B(2,1), B(2,3), B(3,1), B(3,2)
[例2] 农夫过河问题
一个老农携带一只狐狸、一头羊羔和一筐白菜, 要从南岸过河到北岸。岸边有一条小船,只有老农 自己能划船,而且除了老农以外,每次只能再带一 样东西过河。在整个渡河过程中,无论什么情况, 若老农不在场时,则不允许狐狸和羊羔单独相处, 否则羊羔会遭殃;羊羔也不得与白菜放在一起,否 则羊羔会吃白菜。 请问,老农如何才能把它们全部安全摆渡到北 岸?
狐狸和羊羔在同一岸 (狐狸要吃羊羔)
(N,S,S,N):老农和白菜在北岸,狐狸和羊羔在南岸
5.操作约束
根据题意,在10种可能的安全状态里,只有4种 是有可能的操作:
1)老农独自过河(包括从南岸到北岸和从北岸到南岸,下同) 2)老农携带狐狸过河 3)老农携带羊羔过河 4)老农携带白菜过河
(S,S,S,S)
N-S(1,1,0,0)
(N,N,S,N) N--S(1,0,0,0) (S,N,S,N) S--N(1,0,1,0) (N,N,N,N)
[例3] 二阶梵塔问题(P53)
解:设立柱 1、2和3以及两个圆盘A和B 。 用Sk=( Sk0, Sk1)表示问题状态,Sk0表示圆盘A所在的立柱,Sk1表 示圆盘B所在的立柱,全部可能的状态共有九种: S0=( 1,1), S1=( 1,2), S2=( 1,3) S3=( 2,1), S4=( 2,2), S5=( 2,3) S6=( 3,1), S7=( 3,2), S8=( 3,3) 问题的初始状态集合是S={S0},目标状态集合是G={S4,S8}。
如:初始状态:(S,S,S,S), 终止状态:(N,N,N,N), 中间状态:S-N(1,1,0,0)
3.状态约束分析
因老农、狐狸、羊羔和白菜都有2种状态,即在南岸和北岸,所 以4个对象的总状态数为2*2*2*2=16种,按条件要求,有几种状态不 能存在,如表所示。所以只有10种可能状态。
老农和其他三个对象不 在同一岸(狐狸要吃羊 羔,羊羔要吃白菜) 羊羔和白菜在同一岸 (羊羔要吃白菜) (S,N,N,N):老农在南岸,其他三个对象在北岸 (N,S,S,S):老农在北岸,其他三个对象在南岸 (S,S,N,N):老农和狐狸在南岸,羊羔和白菜在北岸 (N,N,S,S):老农和狐狸在北岸,羊羔和白菜在南岸 (S,N,N,S):老农和白菜在南岸,狐狸和羊羔在北岸
初始状态
2 8 3 1 6 4 7 5 2 8 3 1 4 7 6 5 2 8 3 1 4 7 6 5 2 8 1 4 3 7 6 5 2 8 1 4 3 7 6 5 3 2 8 3 2 1 6 1 8 6 7 5 4 7 5 4 2 8 3 1 6 7 5 4 2 8 3 1 6 7 5 4 2 8 1 6 3 7 5 4 2 8 1 6 3 7 5 4 2 8 3 1 5 6 7 4