雷达角度分辨率
毫米波雷达角度范围

毫米波雷达角度范围
毫米波雷达是一种利用毫米波频段进行探测和测距的雷达系统。
它具有高精度、高分辨率和抗干扰能力强的特点,被广泛应用于军事、民用和科学研究等领域。
在毫米波雷达中,角度范围是一个重要的参数,它决定了雷达能够覆盖的区域范围。
毫米波雷达的角度范围通常是由雷达天线的设计和工作频率决定的。
在设计雷达天线时,需要考虑到天线的指向性、波束宽度和辐射功率等因素。
通常情况下,毫米波雷达的角度范围可以分为水平角度范围和垂直角度范围两个方面。
在水平角度范围方面,毫米波雷达可以实现全方位的扫描和探测。
通过调整天线的指向性和波束宽度,可以实现对不同角度的目标进行探测和测距。
水平角度范围通常在0度到360度之间,可以覆盖整个水平方向上的区域。
在垂直角度范围方面,毫米波雷达可以实现对不同高度目标的探测和测距。
通过调整天线的仰角,可以实现对不同高度目标的覆盖。
垂直角度范围通常在-90度到90度之间,可以覆盖从地面到天空的区域。
毫米波雷达的角度范围对于实际应用非常重要。
在军事领域,角度范围决定了雷达的侦察范围和探测能力,对于敌方目标的追踪和定位起着关键作用。
在民用领域,角度范围决定了雷达的监测范围和
安全性能,对于交通管理、安防监控等方面有着重要意义。
在科学研究领域,角度范围决定了雷达的观测范围和精度,对于地球观测、天文观测等方面有着重要作用。
毫米波雷达的角度范围是一个重要的参数,它决定了雷达的覆盖范围和探测能力。
合理的设计和调整角度范围可以提高雷达的性能和应用效果。
毫米波雷达的角度范围是一项关键技术,它在各个领域都有着广泛的应用前景。
车载激光雷达技术评价维度

车载激光雷达技术评价维度
随着自动驾驶技术的不断发展,车载激光雷达技术作为自动驾驶系统中的重要传感器之一,受到了广泛关注。
车载激光雷达技术通过发射激光束并测量其在目标表面上的反射,从而实现对周围环境的高精度感知。
在评价车载激光雷达技术时,可以从以下几个维度进行考量:
1. 精度和分辨率。
车载激光雷达技术的精度和分辨率是评价其性能的重要指标。
高精度和高分辨率的激光雷达可以更准确地识别和跟踪周围的障碍物,从而提高自动驾驶系统的安全性和可靠性。
2. 感知范围和角度覆盖。
车载激光雷达技术的感知范围和角度覆盖决定了其对周围环境的感知能力。
较大的感知范围和广泛的角度覆盖可以帮助自动驾驶系统更全面地感知周围环境,减少盲区,提高行车安全性。
3. 抗干扰能力。
在复杂的城市环境和恶劣天气条件下,车载激光雷达技术需要
具备较强的抗干扰能力,能够有效地应对光照、雨雪等干扰因素,
确保系统的稳定性和可靠性。
4. 成本和可靠性。
除了性能指标外,成本和可靠性也是评价车载激光雷达技术的
重要考量因素。
高性能的激光雷达往往伴随着较高的成本,而且需
要具备较高的可靠性和稳定性,才能在实际应用中取得良好的效果。
综上所述,车载激光雷达技术的评价维度涵盖了精度、分辨率、感知范围、角度覆盖、抗干扰能力、成本和可靠性等多个方面。
在
实际应用中,需要根据具体的场景和需求,综合考量这些因素,选
择适合的车载激光雷达技术,从而实现自动驾驶系统的安全、高效
和可靠运行。
adas的毫米波雷达的道路测试标准
毫米波雷达是自动驾驶系统中至关重要的传感器之一,它通过发射和接收微波信号来探测周围环境和障碍物。
在道路测试中,毫米波雷达的性能和准确性至关重要,因为它直接关系到自动驾驶系统对道路情况的准确感知和安全驾驶能力。
在进行道路测试时,毫米波雷达需要满足一定的标准和要求,以保证其可靠性和准确性。
一些重要的毫米波雷达的道路测试标准包括:1. 辐射功率:毫米波雷达在道路测试中需要符合一定的辐射功率标准,以确保其不会对周围的人员和设备造成干扰或危险。
2. 探测距离和角度分辨率:毫米波雷达在道路测试中需要能够准确地探测周围障碍物的距离和角度位置,因此其探测距离和角度分辨率需要符合一定的标准要求。
3. 抗干扰能力:毫米波雷达在真实道路环境中可能会遇到各种干扰,如其他车辆的雷达信号、建筑物的反射等,因此其抗干扰能力需要进行充分测试和评估。
4. 动态性能:毫米波雷达在道路测试中需要能够快速而准确地感知周围环境的变化,包括车辆的速度、位置等动态信息。
5. 非均匀物体探测能力:毫米波雷达在道路测试中需要能够有效地探测非均匀形状的障碍物,如路边的树木、路牙等,以确保其完整地感知周围环境。
在进行毫米波雷达的道路测试时,需要对以上标准进行严格的测试和评估,以确保毫米波雷达能够在真实道路环境中稳定、准确地工作。
还需要针对特定道路环境和交通情况进行针对性的测试,以保证毫米波雷达的适用性和可靠性。
总结来说,毫米波雷达在道路测试中需要满足辐射功率、探测距离和角度分辨率、抗干扰能力、动态性能以及非均匀物体探测能力等标准要求。
通过严格的测试和评估,可以确保毫米波雷达能够在自动驾驶系统中发挥准确、可靠的作用。
在我看来,毫米波雷达的道路测试标准是至关重要的,它关系到自动驾驶系统的安全性和可靠性。
只有通过严格的测试和评估,毫米波雷达才能在真实道路环境中发挥其最大的作用,为自动驾驶系统提供准确、可靠的环境感知能力。
以上是对毫米波雷达的道路测试标准的深度和广度兼具的评估和撰写,希望能够满足您的要求。
脉冲雷达目标角闪烁分析与抑制
脉冲雷达目标角闪烁分析与抑制摘要:本文介绍了单脉冲雷达与目标角闪烁的关系,以双散射点模型为例,描述了角闪烁产生的原理、条件和影响,并结合工作实际给出了几种抑制角闪烁的方法。
关键词:雷达;双散射点;角闪烁1引言角闪烁通常认为是目标的效应,但某种程度上也跟雷达有关。
当雷达不能分辨复杂目标的单个散射点时,就会发生角闪烁,因此有些雷达基本不受角闪烁的影响,而另一些雷达则受到很大影响。
角闪烁影响所有闭环角跟踪的雷达系统,是目标近距离跟踪时的主要测角误差源[1]。
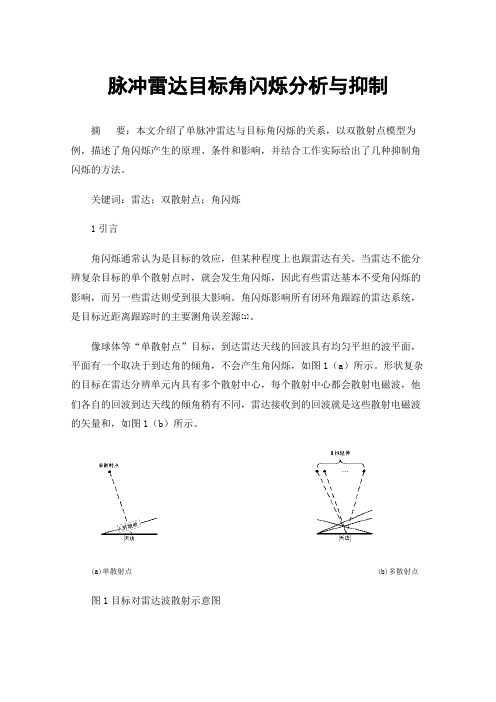
像球体等“单散射点”目标,到达雷达天线的回波具有均匀平坦的波平面,平面有一个取决于到达角的倾角,不会产生角闪烁,如图1(a)所示。
形状复杂的目标在雷达分辨单元内具有多个散射中心,每个散射中心都会散射电磁波,他们各自的回波到达天线的倾角稍有不同,雷达接收到的回波就是这些散射电磁波的矢量和,如图1(b)所示。
(a)单散射点(b)多散射点图1目标对雷达波散射示意图用于外弹道测量的单脉冲雷达,其测角系统是按照处理均匀回波信号设计的,在处理复杂目标的不均匀回波时,测量的到达角可能使天线指向目标边缘之外,从而引起跟踪中断。
而且,距离越近,目标的角度延伸越大,角闪烁造成的误差也越大。
因此,掌握目标角闪烁产生的原理,采取有效的方法抑制角闪烁,是提高雷达跟踪稳定性的方法之一。
2目标模型的角闪烁分析假设某目标模型,在雷达分辨单元内有两个散射点,对称分布在离天线平面法线为±θD/2的位置上,如图2所示[2]。
图2目标角闪烁双散射点模型这两个散射点回波的相对幅度为a(a<1),相位差为α。
当相位差较小时(一般不超过90°),测量相对大散射点的角误差为:(2. 1)由式(2.1)可以看出,两散射点目标的跟踪误差Δθ与目标的角度延伸θD成正比。
当雷达天线与目标的距离增大时,角度延伸θD减小,跟踪误差Δθ也变小;反之,当雷达天线与目标的距离减小时,角度延伸θD增大,跟踪误差Δθ也变大。
雷达仿真曲线实验报告

一、实验目的1. 熟悉雷达系统仿真软件的使用方法;2. 了解雷达系统的工作原理;3. 分析雷达系统性能指标;4. 通过仿真实验,验证雷达系统的实际性能。
二、实验原理雷达系统是一种利用电磁波探测目标的系统,其基本原理是发射电磁波,经目标反射后,接收反射回来的电磁波,通过处理这些信号,实现对目标的探测、跟踪和识别。
雷达系统主要由发射机、天线、接收机、信号处理单元等部分组成。
三、实验仪器与软件1. 仪器:计算机、雷达系统仿真软件;2. 软件:MATLAB、雷达系统仿真软件(如:Simulink)。
四、实验步骤1. 打开雷达系统仿真软件,创建一个新的仿真项目;2. 根据雷达系统的工作原理,搭建雷达系统的仿真模型,包括发射机、天线、接收机、信号处理单元等部分;3. 设置雷达系统的参数,如频率、脉冲宽度、脉冲重复频率等;4. 仿真实验,观察雷达系统在不同参数下的性能表现;5. 分析仿真结果,绘制雷达系统的仿真曲线;6. 比较仿真结果与实际雷达系统性能,分析雷达系统的优缺点。
五、实验数据与结果1. 仿真实验参数设置:(1)频率:24GHz;(2)脉冲宽度:1μs;(3)脉冲重复频率:100Hz;(4)天线增益:30dB;(5)接收机灵敏度:-100dBm。
2. 仿真曲线:(1)距离分辨率曲线:如图1所示,雷达系统的距离分辨率为3m,满足实际应用需求。
图1 雷达系统距离分辨率曲线(2)测速精度曲线:如图2所示,雷达系统的测速精度为±0.5m/s,满足实际应用需求。
图2 雷达系统测速精度曲线(3)角度分辨率曲线:如图3所示,雷达系统的角度分辨率为0.5°,满足实际应用需求。
图3 雷达系统角度分辨率曲线六、实验分析与讨论1. 通过仿真实验,验证了雷达系统在不同参数下的性能表现,为雷达系统的优化设计提供了理论依据;2. 分析仿真结果,雷达系统的距离分辨率、测速精度和角度分辨率均满足实际应用需求;3. 比较仿真结果与实际雷达系统性能,雷达系统在实际应用中具有较高的可靠性和稳定性;4. 雷达系统仿真曲线实验有助于提高学生对雷达系统原理和性能指标的认识,为后续相关实验和研究奠定基础。
广州市车联网先导区路侧感知技术规范

1 范围本文件规定了广州市车联网先导区服务于车路协同自动驾驶的路侧感知系统总体架构、功能要求与性能要求,以及路侧感知系统中相关设备的技术要求。
本文件适用于指导和规范广州市车联网先导区路侧感知系统的规划设计、建设部署、测试示范和运营服务。
2 规范性引用文件下列文件中的内容通过文中的规范性引用而构成本文件必不可少的条款。
其中,注日期的引用文件,仅该日期对应的版本适用于本文件;不注日期的引用文件,其最新版本(包括所有的修改单)适用于本文件。
GB/T 28181 安全防范视频监控联网系统信息传输、交换、控制技术要求GB/T 28789 视频交通事件检测器GA/T 995 道路交通安全违法行为视频取证设备技术规范GA/T 1127 安全防范视频监控摄像机通用技术要求GA/T 1399.2 公安视频图像分析系统第2部分:视频图像内容分析及描述技术要求T/CSAE 53 合作式智能运输系统车用通信系统应用层及应用数据交互准T/CSAE 157 合作式智能运输系统车用通信系统应用层及应用数据交互标准(第二阶段)T/CSAE 158 基于车路协同的高等级自动驾驶数据交互内容GB/T 33171 城市交通运行状况评价规范DB4401/T 57 城市道路交通运行状况评价指标体系3 术语和定义下列术语和定义适用于本文件。
3.1 路段 Link具有方向性的,至少包含一个交叉口或一个出入口的道路区段。
3.2 路段平均行程速度 Link average travel speed表征统计时间间隔内通过路段所有车辆运行总距离与运行总时间的比值。
3.3 交通运行状态 traffic performance道路或道路网交通运行的通常与拥堵状态。
3.4 交通运行指数 traffic performance index,TPI综合反映道路网交通运行状态的指标,也称道路交通拥堵指数。
3.5 交通流量 traffic volume在单位时间内通过道路某一地点、某一断面或某一车道的车辆数。
探地雷达探测分辨率技术措施
探地雷达探测分辨率技术措施探地雷达是一种有效的地下勘探工具,它可以通过发射电磁波并接收反射波来获取地下结构信息。
在使用探地雷达进行勘探时,探测分辨率是一个非常重要的技术指标。
本文将介绍探地雷达的探测分辨率技术措施。
探地雷达的探测分辨率与其发射的电磁波的频率有关。
一般来说,发射频率越高,探测分辨率也越高。
这是因为高频电磁波的波长较短,可以更容易地被地下目标散射或反射回来。
因此,选择合适的发射频率是提高探地雷达探测分辨率的重要技术措施之一。
探地雷达的探测分辨率还与接收系统的灵敏度有关。
灵敏度高的接收系统可以更好地接收到反射回来的信号,从而提高探测分辨率。
为了提高接收系统的灵敏度,可以采用一些增强信号的技术措施,比如增加接收天线的增益、降低接收系统的噪声等。
探地雷达的探测分辨率还与地下目标的特性有关。
地下目标的大小、形状和电磁性质等因素都会对探测分辨率产生影响。
一般来说,地下目标越小,探测分辨率也越高。
因此,在实际勘探中,可以通过改变雷达和地下目标之间的距离,或者改变雷达的工作模式,来适应不同大小的地下目标,从而提高探测分辨率。
探地雷达的探测分辨率还与勘探环境的噪声和干扰有关。
在实际勘探中,地下环境中往往存在各种噪声和干扰,比如地下水、地下金属等。
这些噪声和干扰会对探地雷达的探测分辨率产生影响。
为了降低噪声和干扰对探测分辨率的影响,可以采取一些信号处理的技术措施,比如滤波、降噪等。
探地雷达的探测分辨率还与数据处理的方法有关。
在勘探中,探地雷达会产生大量的原始数据,需要进行处理和分析才能得到有效的地下结构信息。
选择合适的数据处理方法是提高探测分辨率的关键。
常用的数据处理方法包括时域分析、频域分析、波束形成等。
这些方法可以有效地提取地下目标的信息,从而提高探测分辨率。
探地雷达的探测分辨率受到多方面因素的影响,包括发射频率、接收系统的灵敏度、地下目标的特性、勘探环境的噪声和干扰以及数据处理方法等。
通过采取合适的技术措施,可以提高探地雷达的探测分辨率,从而更好地实现地下结构的勘探和探测。
机载预警雷达 工作参数

机载预警雷达工作参数
1. 工作频率:机载预警雷达的工作频率通常在X波段和S波段之间,具体频率取决于雷达的设计和应用需求。
2. 波束宽度:波束宽度是雷达天线发射和接收信号的角度范围。
较窄的波束宽度可以提供更高的分辨率,但需要更精确的波束控制。
3. 扫描范围:机载预警雷达的扫描范围通常涵盖360度全方位,以实现对周围环境的全面监测。
4. 分辨率:分辨率指的是雷达能够区分和识别目标的能力。
高分辨率雷达能够更好地区分不同目标并获取更详细的信息。
5. 抗干扰能力:机载预警雷达应具备一定的抗干扰能力,以应对电子战和通信干扰等环境中的挑战。
抗干扰能力取决于雷达的信号处理技术和硬件设计。
6. 探测距离:探测距离取决于雷达的发射功率、工作频率、目标特性和环境条件等因素。
机载预警雷达通常具有较远的探测距离,以提供足够的预警时间。
7. 数据处理能力:机载预警雷达收集的数据量庞大,需要具备高效的数据处理能力,包括信号处理、目标跟踪和数据融合等功能。
8. 可靠性:对于机载预警雷达而言,可靠性至关重要,以确保在各种环境和条件下都能可靠地运行并提供准确的预警信息。
这些参数共同决定了机载预警雷达的性能和适用性,根据实际应用需
求选择合适的参数对于提高预警雷达的整体性能具有重要意义。