第四章:空间力系
理论力学第四章1

Z F
如力F对Z轴之矩表示为: M z ( F ) M o ( Fxy ) Fxy h
力与轴相交或与轴平行(力与轴在同一平面内),力对该轴之矩为零。 方向:右手螺旋法则,与Z轴正方向一致时为正,反之为负。单位:N· m
5
2.力对轴的矩
力对轴之矩合力矩定理:各力对任一轴之矩等于各分力对同一轴之矩的 代数和。 例:将Fxy再分解为Fx、Fy,根据合力矩定理则有:
z
即,力对点的矩矢在过该点的某轴上的投影,等于
力对该轴的矩.
7
空间汇交力系
1、力在直角坐标轴上的投影 直接投影法
Fx F cos
Fy F cos
Fz F cos
8Leabharlann 1.力在直角坐标轴上的投影 二次投影法 Fz Fy Fx
F xy F sin
Fx F sin cos
1、 力对点的矩以矢量表示 ——力矩矢 三要素: (1)大小:力F与力臂的乘积 (2) 方向:转动方向 (3) 作用面:力矩作用面.
MO ( F ) r F
(4–8)
矢量方向:右手螺旋定则。(将右手四指握拳并以它们的弯曲 方向表示力使物体绕该轴转动的转向,而拇指的指向就是力对 3 点之矩矢量的指向)
3. 空间汇交力系的平衡:
空间汇交力系平衡的充要条件是:力系的合力为零
即: R F
F
x 2
i
0
2 2
FR
F
Fy Fz
空间汇交力系的平衡方程
F 0 F 0 Fz 0
x y
11
§4-2
空间力偶系
M mi 代数和
1.平面力偶系:
第4章空间力系分解
合力的大小
FR ( Fx )2 ( Fy )2 ( Fz )2
Fx 方向余弦 cos( FR , i ) FR
Fy Fz cos( FR , j ) cos( FR , k ) FR FR
7
空间汇交力系的合力等于各分力的矢量和,合力的作用 线通过汇交点.
M 为合力偶矩矢,等于各分力偶矩矢的矢量和。
25
力偶系的合成(与汇交力系的计算完全相同)
合力偶矩矢
M Mi
M x Mix M y Miy Mz Miz
M M xi M y j Mzk
合矢量投影定理:Βιβλιοθήκη 合力偶矩矢的大小和方向余弦:
M
M M M
2 2 ix iy iz
2
M ix cos M
cos
M iy M
M iz cos M
26
空间力偶系平衡的充分必要条件是:合力偶矩矢等于零。
为代数量
z
即:力对轴之矩,等于力在垂直于
该轴的平面上的投影对轴与平面交 点之矩。 O x
y
特殊情况:
1、力与轴平行,矩为零。 2、力与轴相交,矩为零。
即: 力与轴位于同一平面内时,力对轴之矩为零。 16
合力矩定理
空间任意力系的合力对于任一轴的矩等于力系中所有各 力对于该轴的矩的代数和。(用于求力矩)
B
F
F
rBA rA
A
M rBA F
rB
O
23
2、空间力偶等效定理
作用在同一刚体上的两个力偶,如果力偶矩矢相等, 则它们彼此等效。
理论力学 第四章 空间力系

r FR = 0
∑F = 0
x
∑F = 0
y
称为空间汇交力系的平衡方程. 称为空间汇交力系的平衡方程. 空间汇交力系平衡的充要条件:该力系中所有 空间汇交力系平衡的充要条件: 充要条件 各力在三个坐标轴上的投影的代数和分别为零. 各力在三个坐标轴上的投影的代数和分别为零.
例 题 1
求: 绳的拉力和墙体的约束反力 。
=
=
F = F′ = F2 1 1
= F2′ = F3 = F3′
= =
定位矢量 滑移矢量 自由矢量 力偶矩矢是自由矢量 力偶矩相等的力偶等效 (5)力偶没有合力,力偶只能由力偶来平衡. 力偶没有合力,力偶只能由力偶来平衡.
3.空间力偶系的合成与平衡条件
=
=
r r r r r r r r r M 1 = r1 × F1 , M 2 = r2 × F2 ,......, M n = rn × Fn
A
P
c a y
i
j k
O
MO ( P ) = r × P = 0 b 0 0 0 P = Pbi
(2)利用力矩关系
x
α
b
M OA ( P ) = M O ( P ) cos α = Pab a 2 + b2 + c 2
MO(P)
例 题 4
已知:OA=OB=OC =b, OA⊥OB⊥OC. 已知: 求: F 对OA边的中点 之矩在 方向的投影。 边的中点D之矩在 方向的投影。 力 边的中点 之矩在AC方向的投影
3、力对点的矩与力对过该点的轴的矩的关系 r r r r M x ( F ) = M x ( Fx ) + M x ( Fy ) + M x ( Fz ) = Fz ⋅ y − Fy ⋅ z
工程力学-4
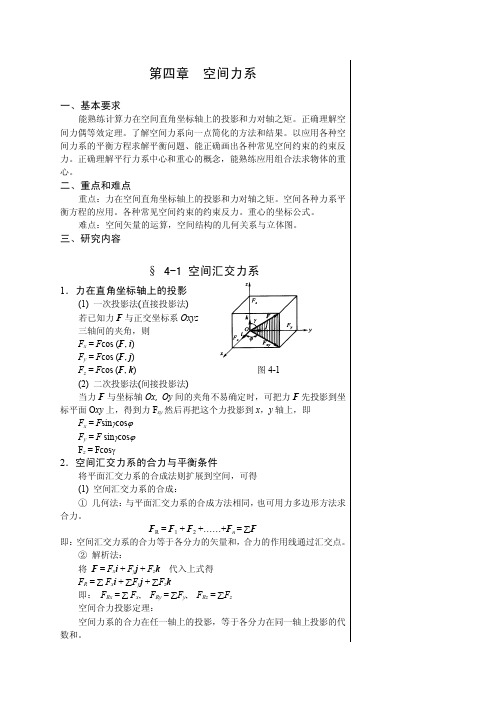
图 4-2 解:研究对象:起重杆 ABG 重物
受力分析:P, F1, F2, FA (AB 为二力杆) 球铰链如图 4-2b 特点:1) 可绕球心任意相对转动
2) 约束反力可用三个直交分力表示 选坐标 Axyz 列平衡方程:
Fx = 0, Fy = 0, Fz = 0,
F1 sin 45° F2 sin 45° = 0 FA sin 30° F1 cos 45°cos 30° F2 cos 45°cos 30° = 0 F1 cos 45°sin 30° + F2 cos 45°sin 30° + FA cos30° P = 0
2.空间汇交力系的合力与平衡条件
将平面汇交力系的合成法则扩展到空间,可得
(1) 空间汇交力系的合成:
① 几何法:与平面汇交力系的合成方法相同,也可用力多边形方法求
合力。
FR = F1 + F2 +……+Fn = F 即:空间汇交力系的合力等于各分力的矢量和,合力的作用线通过汇交点。
② 解析法:
将 F = Fxi + Fyj + Fzk 代入上式得 FR = Fxi + Fyj + Fzk 即: FRx = Fx, FRy = Fy, FRz = Fz 空间合力投影定理:
M0(F)在三个坐标轴上的投影,即
[M0(F)]x = yFz – zFy
[M0(F)]y = zFx – xFz
(a)
[M0(F)]z =xFy – yFz
2.力对轴的矩
以门的转动为例来说明:力 F 与转轴不相垂直的情况:此时可把力 F
分解为平行 z 轴的 Fz 和垂直于 z 轴的平面 xy 上的分力 Fxy,(即力 F 在 xy 平面上的投影)很显然 Fz 对门没有转动效应,只有 Fxy 对门有转动效应,因 此,可用力 Fxy 对 O 点主矩来度量,即:
理论,力学,答案,理论力学习题答案

·36·第4章 空间力系一、是非题(正确的在括号内打“√”、错误的打“×”)1.力在坐标轴上的投影是代数量,而在坐标面上的投影为矢量。
( √ )2.力对轴之矩是力使刚体绕轴转动效应的度量,它等于力在垂直于该轴的平面上的分力对轴与平面的交点之矩。
( √ )3.在平面问题中,力对点之矩为代数量;在空间问题中,力对点之矩也是代数量。
( × )4.合力对任一轴之矩,等于各分力对同一轴之矩的代数和。
( √ )5.空间任意力系平衡的必要与充分条件是力系的主矢和对任一点的主矩都等于零。
( √ ) 6.物体重力的合力所通过的点称为重心,物体几何形状的中心称为形心,重心与形心一定重合。
( × ) 7.计算一物体的重心,选择不同的坐标系,计算结果不同,因而说明物体的重心位置是变化的。
( × ) 8.物体的重心一定在物体上。
( × )二、填空题1.空间汇交力系共有三个独立的平衡方程,它们分别表示为0=∑xF、0=∑yF和0=∑zF 。
空间力偶系共有三个独立的平衡方程,它们分别表示为0=∑xM、0=∑yM和0=∑zM。
而空间任意力系共有六个独立的平衡方程,一般可表示为0=∑xF、0=∑yF、0=∑zF 、0)(=∑F xM 、 0)(=∑F yM 和0)(=∑F zM 。
2.由n 个力组成的空间平衡力系,如果其中的(n -1)个力相交于A 点,那么另一个力也必定通过点A 。
3.作用在同一刚体上的两个空间力偶彼此等效的条件是力偶矩矢相等。
4.空间力对一点的矩是一个矢量,而空间力对某轴的矩是一个代数量。
5.空间力F 对任一点O 之矩)(F M O 可用矢量积来表示,即F r F M ⨯=)(O 。
写成解析表达式为k j i F M )()()()(x y z x y z O yF xF xF zF zF yF -+-+-=。
6.当空间力与轴相交时,力对该轴的矩等于零。
空间力系习题
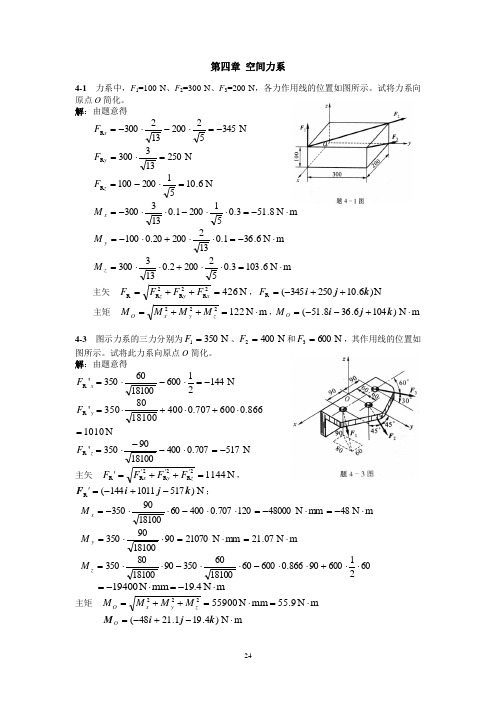
第四章 空间力系4-1 力系中,F 1=100 N 、F 2=300 N 、F 3=200 N ,各力作用线的位置如图所示。
试将力系向原点O 简化。
解:由题意得 N 34552200132300R -=⋅-⋅-=x FN 250133300R =⋅=y F N 6.1051200100R =⋅-=z Fm N 8.513.0512001.0133300⋅-=⋅⋅-⋅⋅-=x Mm N 6.361.013220020.0100⋅-=⋅⋅+⋅-=y Mm N 6.1033.0522002.0133300⋅=⋅⋅+⋅⋅=z M 主矢 N 4262R 2R 2R R =++=x y z F F F F ,N )6.10250345(R k j i ++-=F主矩 m N 122222⋅=++=z y x O M M M M ,m N )1046.368.51(⋅+--=k j i O M4-3 图示力系的三力分别为N 3501=F 、N 4002=F 和N 6003=F ,其作用线的位置如图所示。
试将此力系向原点O 简化。
解:由题意得N 144216001810060350'R -=⋅-⋅=x F N1010866.0600707.04001810080350'R =⋅+⋅+⋅=y FN 517707.04001810090350'R -=⋅--⋅=z F主矢 N 11442'R 2'R 2'R R =++=z y x F F F 'F , N )5171011144(R k j i F -+-='; m N 48mm N 48000120707.0400601810090350⋅-=⋅-=⋅⋅-⋅⋅-=x M m N 07.21mm N 21070901810090350⋅=⋅=⋅⋅=y M 602160090866.0600601810060350901810080350⋅⋅+⋅⋅-⋅⋅-⋅⋅=z M m N 4.19mm N 19400⋅-=⋅-=主矩 m N 55.9mm N 55900222⋅=⋅=++=z y x O M M M Mm N )4.191.2148(⋅-+-=k j i M O4-5 轴AB 与铅直线成α角,悬臂CD 与轴垂直地固定在轴上,其长为a ,并与铅直面zAB 成θ角,如图所示。
黄安基--第4章 空间力系的简化和平衡
理论力学电子教程
第四章 空间力系
2、空间力偶系的合成与平衡.
M M1 M2 Mn M
空间力偶系可合成为一合力偶, 该合力偶矩矢等于力 偶系中所有各力偶矩矢的矢量和。
空间力偶系平衡的必要与充分条件是:该力偶系中所 有的各力偶矩矢的矢量和为零 。
M 0
投影形式有
M x 0, M y 0, M z 0,
影)P58 Fxy F sin
Fx Fxy cos F sin cos
Fy Fxy sin F sin sin
Fz F cos
x
反之 F Fx2 Fy2 Fz2
cos Fx / F, cos Fy / F, cos Fz / F
这里注意力向坐标轴投影是代数量
而力向某平面投影是矢量。
第四章 空间力系
作业: 今天交上次:全部 布置本次:课后习题 4-2、4-6、补充:电子教案4-4
理论力学电子教程
第四章 空间力系
§4-4 空间任意力系的简化
1、空间任意力系向已知点的简化
简化理论依据是: 力线平移定理。
力线平移定理:
作用于刚体上的任一力,可平移 至刚体的任意一点,欲不改变该 力对于刚体的作用,则必须在该 力与指定点所决定的平面(力 矩面)内加一力偶,其力偶矩矢
理论力学电子教程
第四章 空间力系
(5)FR 0, M 0 0, M 0 // FR
(最后形成力+力偶(称其为力螺旋))
理论力学电子教程
(6)FR 0, M 0 0,
(成任意角)
(最后也形成力螺旋)
第四章 空间力系
空间任意力系的合力矩定理
若空间任意力系可以合成为一个合力时,则其合力对于任 一点之矩(或任一轴之矩)等于力系中各力对于同一点之矩的矢 量和(或同一轴之矩的代数和),这即为空间力系合力矩定理。
力学第四章空间力系

§4-3 空间任意力系的平衡方程
解 取折杆为研究对象,画受力图如图所示,选直角坐 标系0xyz,列平衡方程
Fx = 0
FOx = 0
Fy = 0
FOy = 0
Fz = 0
FOz F = 0
Mx F = 0 MOx Fb = 0
§4-3 空间任意力系的平衡方程
平衡基本方程
空间任意力系平衡的充分必要条件:
各力在各坐标轴上的投影代数和分别等于零; 各力对各坐标轴的矩的代数和分别等于零
即:
Fx = 0
Fy = 0
Fz = 0
MxF = 0 M y F = 0 Mz F = 0
§4-3 空间任意力系的平衡方程
§4-3 空间任意力系的平衡方程
例4-5 用空间平衡力系的平面解法重解例4-4 解 重物匀速上升,鼓轮作匀速转动,即处于平衡姿态。取鼓轮为研究 对象。将力G和Q平移到轴线上,分别作垂直平面、水平平面和侧垂直
平面(图a、b、c)的受力图。
a)
c) b)
§4-3 空间任意力系的平衡方程
由(图a、b、 c),列平衡方程。
§4-2 力对轴之矩
力对轴之矩(N·m):度量力使物体绕轴的转动效应
M z (F ) = M O (Fxy ) = Fxyd
结论:力对某轴之矩是力使物体绕该轴 转动效应的度量,其大小等于力对垂直 于某轴平面内力对O点(即某轴在该面 的投影点)之矩。
力对轴之矩的符规定:
§4-2 力对轴之矩
例4-1 图示力F作用在圆轮的平面内,设力F作用线距z轴 距离为d。试计算力F对z轴之矩。
符号规定:从投影的起点到终点的方向与相应坐标轴 正向一致的就取正号;反之,就取负号。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第四章空间力系一、要求1、能熟练地计算力在空间直角坐标轴上的投影和力对轴之矩。
2、对空间力偶的性质及其作用效应要有清晰的理解。
3、了解空间力系向一点简化的方法和结果。
4、能应用平衡条件求解空间汇交力系、空间任意力系、空间平行力系的平衡问题。
5、能正确地画出各种常见空间约束的约束反力。
二、重点、难点1、本章重点:力在空间直角坐标轴上的投影和力对轴之矩。
空间汇交力系、空间任意力系、空间平行力系的平衡方程的应用。
各种常见的空间约束及约束反力。
2、本章难点:空间矢量的运算,空间结构的几何关系与立体图。
三、学习指导1、空间力系的基本问题及其研究方法空间力系研究的基本问题仍然是静力学的三个基本问题,即:物体的受力分析、力系的等效替换和力系的平衡条件。
空间力系是力系中最普遍的情形,其它各种力系都是它的特殊情形。
按由浅入深、由特殊到一般的认识规律研究空间力系,是从理论上对静力学作一个系统而完整的总结。
与平面力系的研究方法相似,这里也采用力向一点平移的方法将空间任意力系分解为空间汇交力系和空间力偶系,再应用这两个力系的合成方法来简化原力系,然后根据简化结果推导出平衡条件。
由于空间力系各力作用线分布在空间,因而使问题复杂化。
出现了力在坐标轴上的二次投影法、力对轴的矩以及用向量表示力对点的矩和力偶矩等新问题,简化的结果和平衡方程也复杂了。
2、各类力系的平衡方程各类力系的独立的平衡方程的数目不变。
但是平衡方程的形式可以改变。
上表列出的是一般用形式。
解题指导1、对于解力在直角坐标轴上投影或力沿直角坐标轴分解这类问题,重要的是确定力在空间的位置。
一般解题的思路如下:(1)认清题意,仔细查看结构(或机构)的立体图,它由哪些部件组成,各部件在空间的位置,以及它们和坐标轴的关系。
(2)认清力的作用线在结构(或机构)的哪个平面内,寻找它与坐标面的交角,然后找力与坐标平面的夹角及力与坐标轴的夹角。
(3)考虑用一次投影或二次投影的方法求解。
2、计算力对轴之矩,一般令矩轴位于一个坐标面内,寻找与矩轴垂直的平面,然后按题意选择以下两种方法:(1)将力投影到垂直于轴的平面上,然后按平面上力对点的矩计算。
怎样将力投影到平面上呢?可先由力的作用点向平面作垂线,再寻找力和垂线所在平面与该平面的交线,然后将力向交线投影。
(2)将力沿直角坐标轴分解,然后根据合力之矩定理计算。
怎样选择分解方向呢?一般让两个分力在与矩轴垂直的平面内,一个分力平行于矩轴。
3、空间力系的解题技巧有以下两点:(1)平衡力系在任意轴上的投影等于零,在选择三个投影轴时,可不相交,可不相互垂直,但三轴不能共面,任意二轴也不能平行。
如果所选投影轴垂直于未知力或它所在的平面,则可减少平衡方程中未知力的数量,便于求解方程。
(2)平衡力系对任意轴的力矩都必须等于零,在选择三个力矩轴时,可不相交。
可不相互垂直。
另外,用力矩方程也能保证合力为零,可用力矩方程代替投影方程。
因此,空间力系的平衡方程可以有四矩式、五矩式、六矩式。
如果所选取的矩轴与未知力平行或通过几个未知力(或力的作用线)的交点,则可使平衡方程中的未知力的数量减少,便于求解方程。
四、典型例题解析例题4. 1 空间平行力系简化的结果是什么?可能合成为力螺旋吗?解答:空间平行力系简化的中间结果仍为一主矢和主矩(主矢与主矩垂直),简化的最后结果可为一合力、合力偶或平衡,唯独不可能是力螺旋。
因主矢与主矩相垂直。
例题4. 2 (1)空间力系中各力的作用线平行于某一固定平面;(2)空间力系中各力的作用线分别汇交于两个固定点。
试分析这两种力系各有几个平衡方程?解答:(1)空间力系中各力的作用线平行于某一固定平面,取某轴垂直于此固定平面,则各力在此轴的投影均为零,此方程失去使用价值,所以此力系的平衡方程个数等于或小于五个。
(2)空间力系中各力的作用线分别汇交于两个固定点,过这两点做一轴,此力系各力对此轴的力矩均为零,此方程失去求解价值,所以此力系的平衡方程个数等于或小于五个。
例题4. 3 传动轴用两个止推轴承支持,每个轴承有三个未知力,共6个未知量。
而空间任意力系的平衡方程恰好有6个,是否为静定问题?解答:此问题为静不定问题,因为六个轴承约束反力对此轴的力矩均为零,此力系的独立方程为五个。
例题4. 4空间任意力系向两个不同点简化,试问下述情况是否可能:(1)主矢相等,主矩也相等;(2)主矢不相等,主矩相等;(3)主矢相等,主矩不相等;(4)主矢、主矩都不相等。
解答:空间任意力系的主矢与简化中心无关,所以若向不同的点简化,主矢不相等是不可能的,因此(2)、(4)两种情况是不可能的。
空间任意力系的主矩一般与简化中心有关,所以(3)是可能的。
(1)主矢相等、主矩也相等也是可能的(两点均在主矢作用线上)。
例题4. 5 一均质等截面直杆的重心在哪里?若把它弯成半圆形,重心的位置是否改变?解答:在几何形心上(杆长一半处),若把它弯成半圆形,重心的位置改变。
例题4.6 当物体质量分布不均匀时,重心和几何中心还重合吗?为什么?解答:一般不重合。
因为几何中心只与物体的几何形状有关,而物体的重心与物体的质量分布有关,这是两个不同的概念与不同的度量。
例题4. 7 计算一物体重心的位置时,如果选取的坐标系不同,重心的坐标是否改变?重心在物体内的位置是否改变?解答:同一点在不同的坐标系里,其坐标是不同的,所以,计算物体的重心位置时,如果选取的坐标系不同,重心的坐标要改变。
重心在物体内的位置不会因坐标系的选择不同而改变。
例题4. 8 已知N F 1001= ,N F 3002=,N F 2003=,作用位置及尺寸如下图所示;求 力系向O 点简化的结果。
解:力系主矢在轴上的投影为:N F F FF xRx 4.345cos sin 32-=--==∑βαN F FF yRy 6.249cos 2===∑αN F F FF zRz 56.10sin 31=-==∑β力系对O 点的主矩在轴上的投影为:m N F F M M xOx ⋅-=⋅-⋅-==∑78.51300sin 100cos )(32βαF m N F F MM yOy ⋅-=⋅-⋅-==∑65.36100sin 200cos )(21ααFm N F F MM zOz ⋅=⋅+⋅==∑6.103300cos 200cos )(32βαF力系向O 点简化所得的力R F 和力偶O M 的各个分量如图)(b 所示。
)(a )(b 图题8.4yRxF OxyzRyF RzF oxMoyMozM例题4. 9 已知小正方格的边长为mm 10,各力的大小及作用线位置如图所示;求力系的合力。
解:该平行力系的合力为)(202015101015↑=+-+-===∑N FF F zRz R设合力R F 与平面的交点为),(C C y x ,由合力矩定理有:mmN MM xR x ⋅=⨯+⨯-⨯+⨯-⨯==∑65050204015301020101015)()(F Fmm N MM yR y ⋅-=⨯-⨯-⨯+⨯-==∑12002020301010104015)()(F F由RZ C R x F y M =)(F ,RZ C R y F x M -=)(F 解出:mm F M x RzR y C 60)(=-=F , mm F M y RzR x C 5.32)(=-=F力系的合力R F 如图中所示。
例题4. 10 已知G 处受力F 作用,板和杆的自重不计;求各杆的内力。
解:板的受力如图,由0)(=F AEM、0)(=F CD M 以及0)(=F BFM,分别得04=F ,06=F ,02=F再由0)(=F EF M ,05005001=--F F0)(=F GF M ,010********=+F F 0)(=F DEM,010*******=--F F ,得F F -=1(压),F F =3,F F -=5(压)图题9.4x)(a )(b 图题11.4例题4. 11 下图所示均质矩形板ABCD 重为W ,用球铰链A 和碟形铰链(活页)B 固定在墙上,并用绳索CE 维持在水平位置。
已知α=∠=∠BAC ECA 。
试求绳索所受张力及A 、B 处的约束力。
解:分析矩形板的受力。
由于蝶形铰B 水平放置,可认为它不能限制板沿y 轴的轴向位移,故),(Bz Bx RB F F F =;球铰A 处的约束力),,(Az Ay Ax RA F F F F =。
于是板所受未知力=RB F),,,,,(T Bz Bx Az Ay Ax R F F F F F F F =。
为了尽量做到由一个平衡方程求解一个未知力,需要灵活选用平衡方程,特别是力对轴之矩形式的平衡方程:0)(∑=F Mz, 0=Bx F (1)0)(∑=F M y ,0sin 222=⋅-⨯l F l W T α,αsin 2W F T =(2)0)(∑=F M x , 0sin 211=+⋅+⨯-Bz T F l F l W α, (3)将式(2)代入式(3),得0=Bz F 。
进而有图题10.40∑=xF,0sin cos =⋅-ααT Ax F F ,α2sin 21T Ax F F =( 4)0∑=yF ,0cos cos =⋅-ααT Ay F F ,α2cos T Ay F F = ( 5) 0∑=zF,0sin =+-αT Az F W F ,αsin T Az F W F -= (6)灵活选用平衡方程,往往可以避免求解联立方程。
与考察二维刚体的平衡问题相似,最好采用力对轴之矩形式的平衡方程。
因此,选择哪一根轴便很有考究。
例如,为求Bz F 可选AC 为取矩轴,于是有0)(∑=F ACM, 0=Bz F显然,此式比式(3)简单。
由计算结果可知,0=RB F 。
这样,矩形板就可看成在ACE 平面内只受三力),,(RA T F F W 作用的系统,这时空间力系化为平面力系。
当然,此三力应汇交于该平面内一点O ,如图)(b 所示。
例题4. 12 已知力偶2M 与3M ,曲杆自重不计;求使曲杆保持平衡的力偶矩1M 和支座A 、D 的反力。
解 曲杆整体受力如图,由平衡方程0∑=xF , 0=Dx F0)(∑=F My,02=-⨯M F a Az0∑=zF, 0=-Dz Az F F0)(∑=F M z,03=-Ay aF M0∑=y F , 0=-Dy Ay F F 0)(∑=F M x ,01=--c F bF M Dy Dz解得:0=Dx F ,aM F Az 2=,aM F Dz 2=a M F Ay 3=, aM F Dy 3=,321M a c Mab M +=例题4. 13 已知等边三角形板的边长为a ,在板内作用一矩为M 的力偶,板、杆的自重不计;求各杆的内力。